Спосіб управління приводними ланками шестиступеневого динамічного стенда опорного типу
Номер патенту: 20060
Опубліковано: 25.12.1997
Автори: Кабанячий Володимир Володимирович, Сотников Дмитро Олексійович
Формула / Реферат
Способ управления приводными звеньями шестистепенного динамического стенда опорного типа, заключающийся в том, что перемещением приводных звеньев создают линейные и угловые движения платформы динамического стенда относительно трех взаимно перпендикулярных осей вращения, отличающийся тем, что положения осей вращения по углам тангажа и рыскания задают в продольном направлении в пределах диапазона, который определяют из условия обеспечения максимальных и равных в положительном и отрицательном направлении линейных перемещений платформы.
Текст
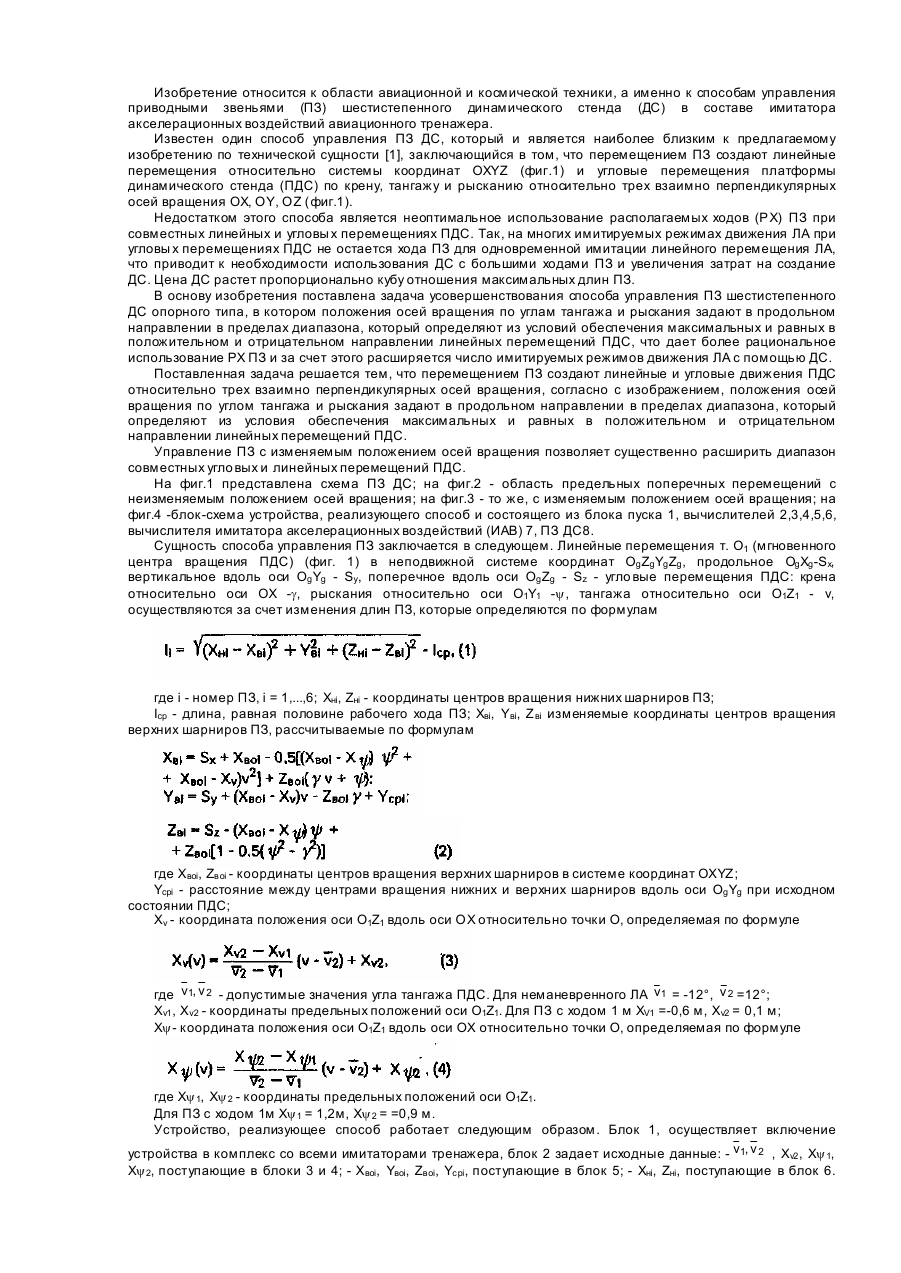
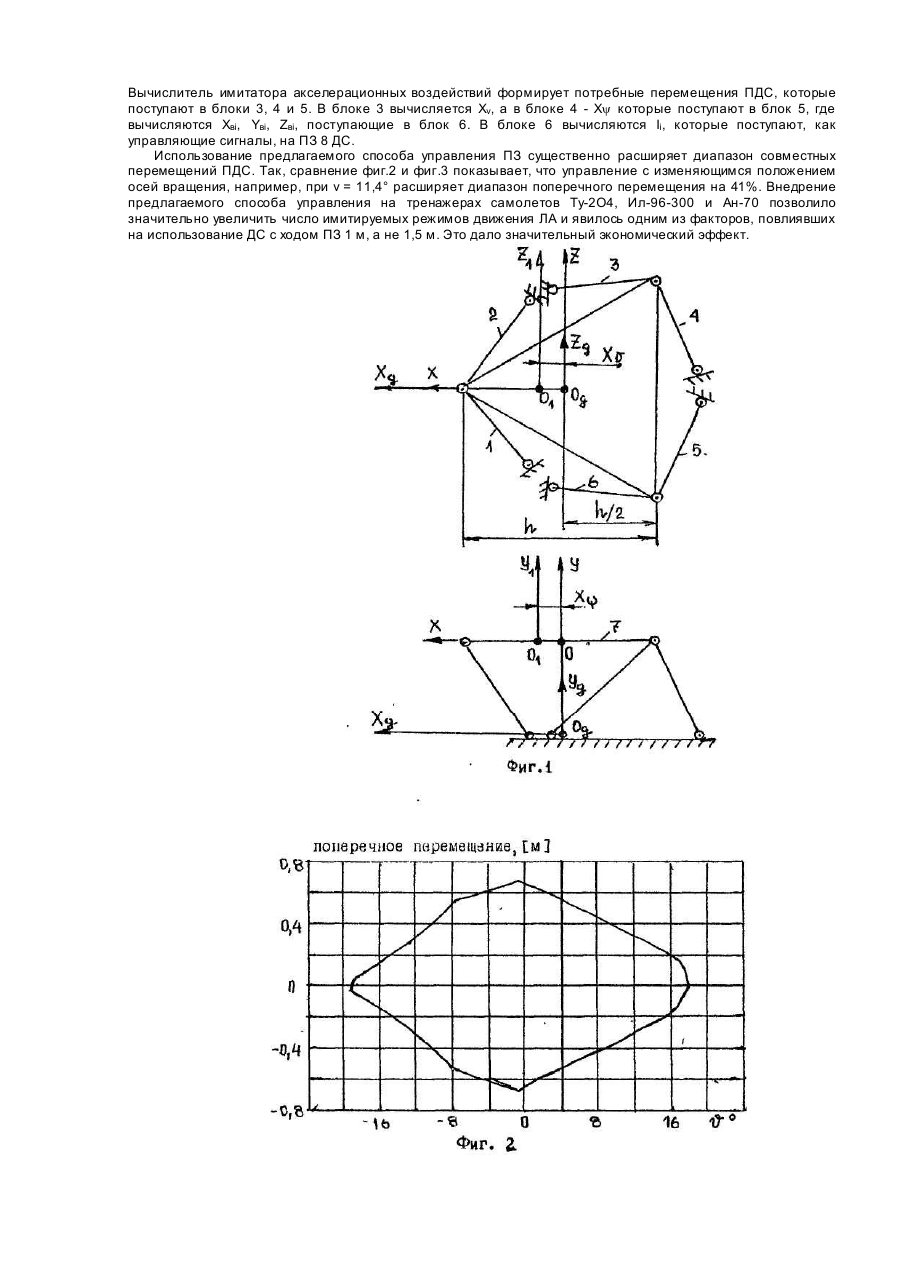
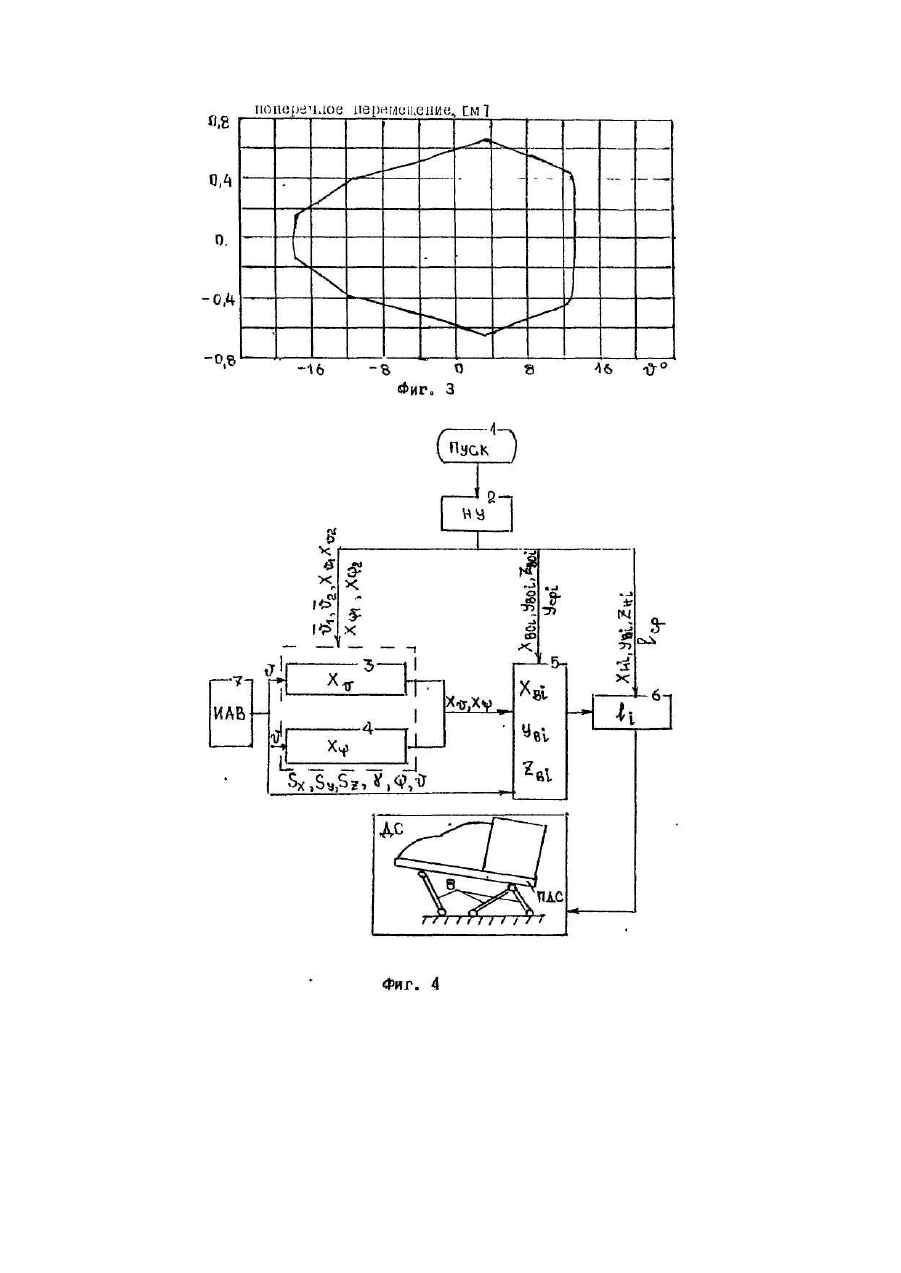
Изобретение относится к области авиационной и космической техники, а именно к способам управления приводными звеньями (ПЗ) шестистепенного динамического стенда (ДС) в составе имитатора акселерационных воздействий авиационного тренажера. Известен один способ управления ПЗ ДС, который и является наиболее близким к предлагаемому изобретению по технической сущности [1], заключающийся в том, что перемещением ПЗ создают линейные перемещения относительно системы координат OXYZ (фиг.1) и угловые перемещения платформы динамического стенда (ПДС) по крену, тангажу и рысканию относительно трех взаимно перпендикулярных осей вращения OX, OY, OZ (фиг.1). Недостатком этого способа является неоптимальное использование располагаемых ходов (РХ) ПЗ при совместных линейных и угловы х перемещениях ПДС. Так, на многих имитируемых режимах движения ЛА при угловы х перемещениях ПДС не остается хода ПЗ для одновременной имитации линейного перемещения ЛА, что приводит к необходимости использования ДС с большими ходами ПЗ и увеличения затрат на создание ДС. Цена ДС растет пропорционально кубу отношения максимальных длин ПЗ. В основу изобретения поставлена задача усовершенствования способа управления ПЗ шестистепенного ДС опорного типа, в котором положения осей вращения по углам тангажа и рыскания задают в продольном направлении в пределах диапазона, который определяют из условий обеспечения максимальных и равных в положительном и отрицательном направлении линейных перемещений ПДС, что дает более рациональное использование РХ ПЗ и за счет этого расширяется число имитируемых режимов движения ЛА с помощью ДС. Поставленная задача решается тем, что перемещением ПЗ создают линейные и угловые движения ПДС относительно трех взаимно перпендикулярных осей вращения, согласно с изображением, положения осей вращения по углом тангажа и рыскания задают в продольном направлении в пределах диапазона, который определяют из условия обеспечения максимальных и равных в положительном и отрицательном направлении линейных перемещений ПДС. Управление ПЗ с изменяемым положением осей вращения позволяет существенно расширить диапазон совместных угло вых и линейных перемещений ПДС. На фиг.1 представлена схема ПЗ ДС; на фиг.2 - область предельных поперечных перемещений с неизменяемым положением осей вращения; на фиг.3 - то же, с изменяемым положением осей вращения; на фиг.4 -блок-схема устройства, реализующего способ и состоящего из блока пуска 1, вычислителей 2,3,4,5,6, вычислителя имитатора акселерационных воздействий (ИАВ) 7, ПЗ ДС8. Сущность способа управления ПЗ заключается в следующем. Линейные перемещения т. Ο1 (мгновенного центра вращения ПДС) (фиг. 1) в неподвижной системе координат Og Zg Yg Zg , продольное Og Xg -Sx, вертикальное вдоль оси Og Yg - Sy, поперечное вдоль оси Og Zg - Sz - угло вые перемещения ПДС: крена относительно оси ОХ -g, рыскания относительно оси Ο1Υ1 -y, тангажа относительно оси Ο1Ζ1 - ν, осуществляются за счет изменения длин ПЗ, которые определяются по формулам где і - номер ПЗ, і = 1,...,6; Хні, Zнi - координаты центров вращения нижних шарниров ПЗ; Icp - длина, равная половине рабочего хода ПЗ; Хві, Yві, Z ві изменяемые координаты центров вращения верхних шарниров ПЗ, рассчитываемые по формулам где Хвоі, Ζвοі - координаты центров вращения верхних шарниров в системе координат OXYZ; Ycpi - расстояние между центрами вращения нижних и верхних шарниров вдоль оси Og Yg при исходном состоянии ПДС; Xv - координата положения оси Ο1Ζ1 вдоль оси ОХ относительно точки О, определяемая по формуле где v1, v 2 - допустимые значения угла тангажа ПДС. Для неманевренного ЛА v1 = -12°, v 2 =12°; Xv1 , Xv2 - координаты предельных положений оси Ο1Ζ1. Для ПЗ с ходом 1 м XV1 =-0,6 м, Xv2 = 0,1 м; Χy- координата положения оси Ο1Ζ1 вдоль оси ОХ относительно точки О, определяемая по формуле где Χy 1, Χy 2 - координаты предельных положений оси Ο1Ζ1. Для ПЗ с ходом 1м Хy 1 = 1,2м, Хy 2 = =0,9 м. Устройство, реализующее способ работает следующим образом. Блок 1, осуществляет включение устройства в комплекс со всеми имитаторами тренажера, блок 2 задает исходные данные: - v1, v 2 , Xv2 , Xy 1, Xy 2, поступающие в блоки 3 и 4; - Хвоі, Υвοі, Zвoi, Yc pi, поступающие в блок 5; - Хні, Ζні, поступающие в блок 6. Вычислитель имитатора акселерационных воздействий формирует потребные перемещения ПДС, которые поступают в блоки 3, 4 и 5. В блоке 3 вычисляется Xv, а в блоке 4 - Χy которые поступают в блок 5, где вычисляются Хві, Yві, Zві, поступающие в блок 6. В блоке 6 вычисляются Іі, которые поступают, как управляющие сигналы, на ПЗ 8 ДС. Использование предлагаемого способа управления ПЗ существенно расширяет диапазон совместных перемещений ПДС. Так, сравнение фиг.2 и фиг.3 показывает, что управление с изменяющимся положением осей вращения, например, при ν = 11,4° расширяет диапазон поперечного перемещения на 41%. Внедрение предлагаемого способа управления на тренажерах самолетов Ту-2О4, Ил-96-300 и Ан-70 позволило значительно увеличить число имитируемых режимов движения ЛА и явилось одним из факторов, повлиявших на использование ДС с ходом ПЗ 1 м, а не 1,5 м. Это дало значительный экономический эффект.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for six-stage dynamic stand drive link control of refernce type
Автори англійськоюSotnykov Dmytro Oleksiiovych, Kabaniachyi Volodymyr Volodymyrovych
Назва патенту російськоюСпособ управления приводными звеньями шестиступенчатого динамического стенда опорного типа
Автори російськоюСотников Дмитрий Алексеевич, Кабанячий Владимир Владимирович
МПК / Мітки
МПК: G09B 9/02
Мітки: ланками, управління, типу, приводними, стенда, динамічного, опорного, спосіб, шестиступеневого
Код посилання
<a href="https://ua.patents.su/3-20060-sposib-upravlinnya-privodnimi-lankami-shestistupenevogo-dinamichnogo-stenda-opornogo-tipu.html" target="_blank" rel="follow" title="База патентів України">Спосіб управління приводними ланками шестиступеневого динамічного стенда опорного типу</a>
Спосіб управління стріловим виконавчим органом гірничо-прохідницького комбайну
Номер патенту: 7628
Опубліковано: 26.12.1995
Автори: Шумалінський Семен Овсійович, Злодєєв Олександр Васильович, Сіненко Віктор Васильович
МПК: E21C 35/24
Мітки: комбайну, органом, управління, спосіб, гірничо-прохідницького, виконавчим, стріловим
Формула / Реферат:
Способ управлення стреловым исполнительным органом горнопроходческого комбайна, заключающийся в выполнении образцового цикла обработки забоя, записи величины, направления и последовательности перемещений исполнительного органа и управлении перемещениями исполнительного органа при последующих циклах обработки забоя в соответствии с программой перемещений, записанной в течение образцового цикла, отличающийся тем, что, с целью повышения...
Верстат для динамічного балансування гранувальних дисків
Номер патенту: 9632
Опубліковано: 30.09.1996
Автори: Папінов Володимир Миколайович, Пузанов Геннадій Михайлович
Мітки: дисків, динамічного, гранувальних, балансування, верстат
Формула / Реферат:
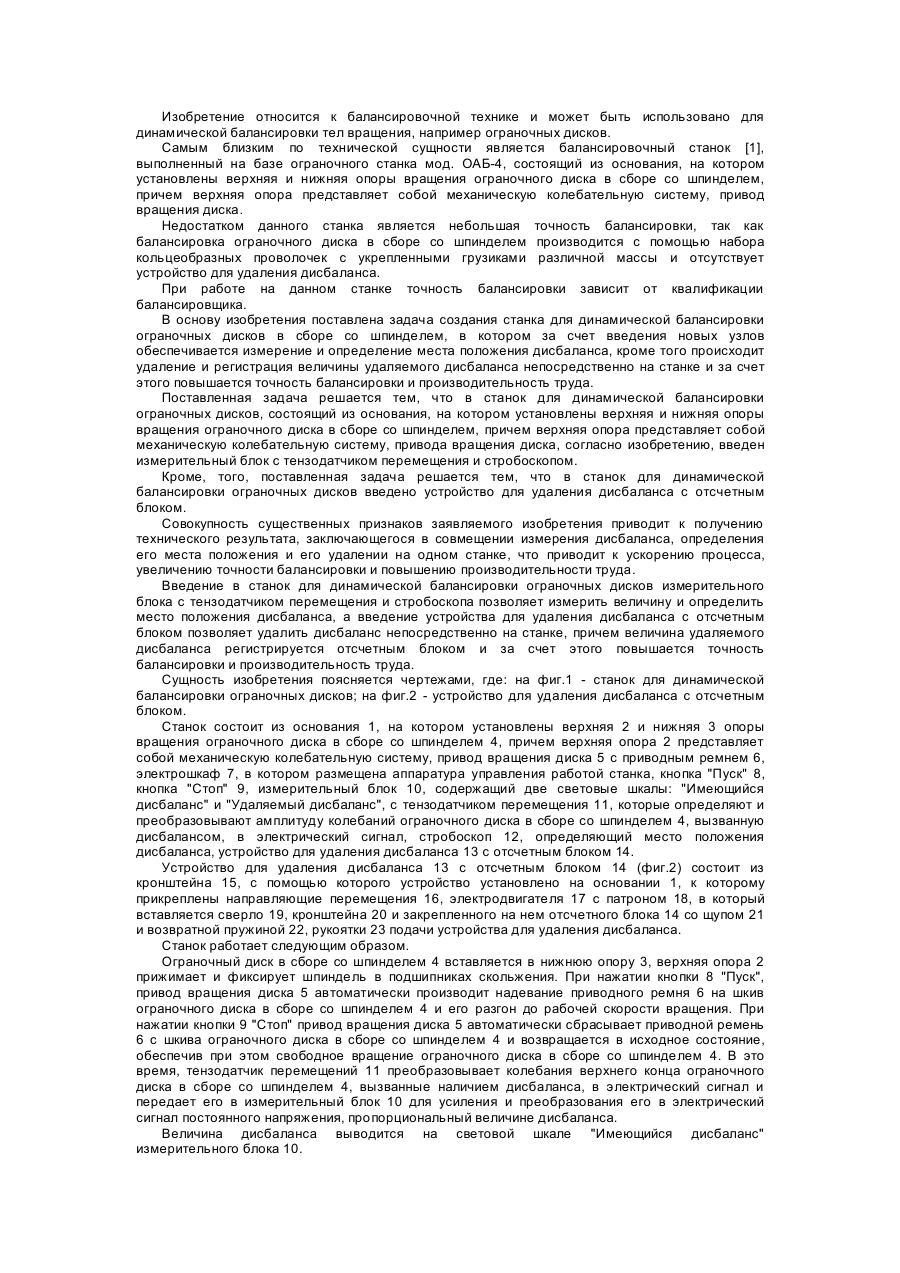
Станок для динамической балансировки ограночных дисков, состоящий из основания, на котором установлены верхняя и нижняя опоры вращения ограничного диска в сборе со шпинделем и привод вращения, причем верхняя опора выполнена в виде механической колебательной системы, отличающийся тем, что станок содержит измерительный блок с тензодатчиком перемещения и стробоскопом и устройство удаления дисбаланса с отсчетным блоком.
Пристрій управління концентрацією плазми в устаткуваннях типу токамак
Номер патенту: 14414
Опубліковано: 25.04.1997
Автори: Попов Борис Миколайович, Греков Володимир Петрович, Козлов Леонід Григорович, Небукін Олександр Іванович, Пятов Валентин Наумович, Нечаєв Володимир Всеволодович, Матвієнко Олександр Володимирович, Головін Олександр Миколайович, Бутенко Вячеслав Костянтинович, Боюн Віталій Петрович, Косцов Горій Олексійович, Кривонос Юрій Георгійович, Міняєв Олег Олександрович, Губарев Вячеслав Федорович, Рубін Ігор Костянтинович
МПК: G21B 1/00
Мітки: устаткуваннях, типу, плазми, концентрацією, управління, пристрій, токамак
Формула / Реферат:
1. Устройство управления концентрацией плазмы в установках типа токамак, содержащее схему управления, включающую последовательно соединенные блок управления, блок памяти заданной концентрации и сумматор, выход схемы управления соединен с управляющим входом вакуумной системы токамака, выполненной в виде последовательно соединенных буферного объема, пьезоклапана и камеры, с которой оптически связан вход интерферометра, выход интерферометра...
Спосіб управління швидкістю прес-поршня машини лиття під тиском
Номер патенту: 7419
Опубліковано: 29.09.1995
Автори: Церковницький Микола Сергійович, Сорокін Микола Олександрович, Лигоцький Ігор Леонідович, Богушевський Володимир Святославович
МПК: B22D 17/32
Мітки: спосіб, машини, прес-поршня, швидкістю, управління, лиття, тиском
Формула / Реферат:
Способ управления скоростью пресс-поршня машины литья под давлением, включающий измерение скорости пресс-поршня, сравнение ее текущего значения с заданными, управление положением следящего золотника, отличающийся тем, что, с целью увеличения производительности литейной машины, дополнительно измеряют массу, объем и линейные размеры отливки, определяют площадь пор, их размер и количество в ответственных местах, дефекты в которых в процессе...
Спосіб частотно-струмового управління двофазним синхронним двигуном
Номер патенту: 9831
Опубліковано: 30.09.1996
Автори: Ярославцев Михайло Іванович, Павлов Євген Федорович
МПК: H02P 27/04
Мітки: сінхронним, двофазним, спосіб, двигуном, управління, частотно-струмового
Формула / Реферат:
(57) Способ частотно-токового управления двухфазным синхронным двигателем, при котором фазные обмотки двигателя запиты-вают синусоидальным и косинусоидальным токами равной амплитуды, регулируя амплитуду которых, управляют моментом, отличающийся тем, что предварительно определяют угловую погрешность взаимной установки фазных секций двигателя и фазные обмотки запитывают указанными токами, сдвинутыми по фазе на угол, равный указанной...
Попередній патент: Протигазовий патрон
Наступний патент: Пристрій для створення надвисоких статичних тисків в герметично ізольованих камерах
Випадковий патент: Лопастне долото