Пристрій для вимірювання температури
Номер патенту: 23966
Опубліковано: 31.08.1998
Автори: Кочан Володимир Володимирович, Березький Олег Миколайович
Формула / Реферат
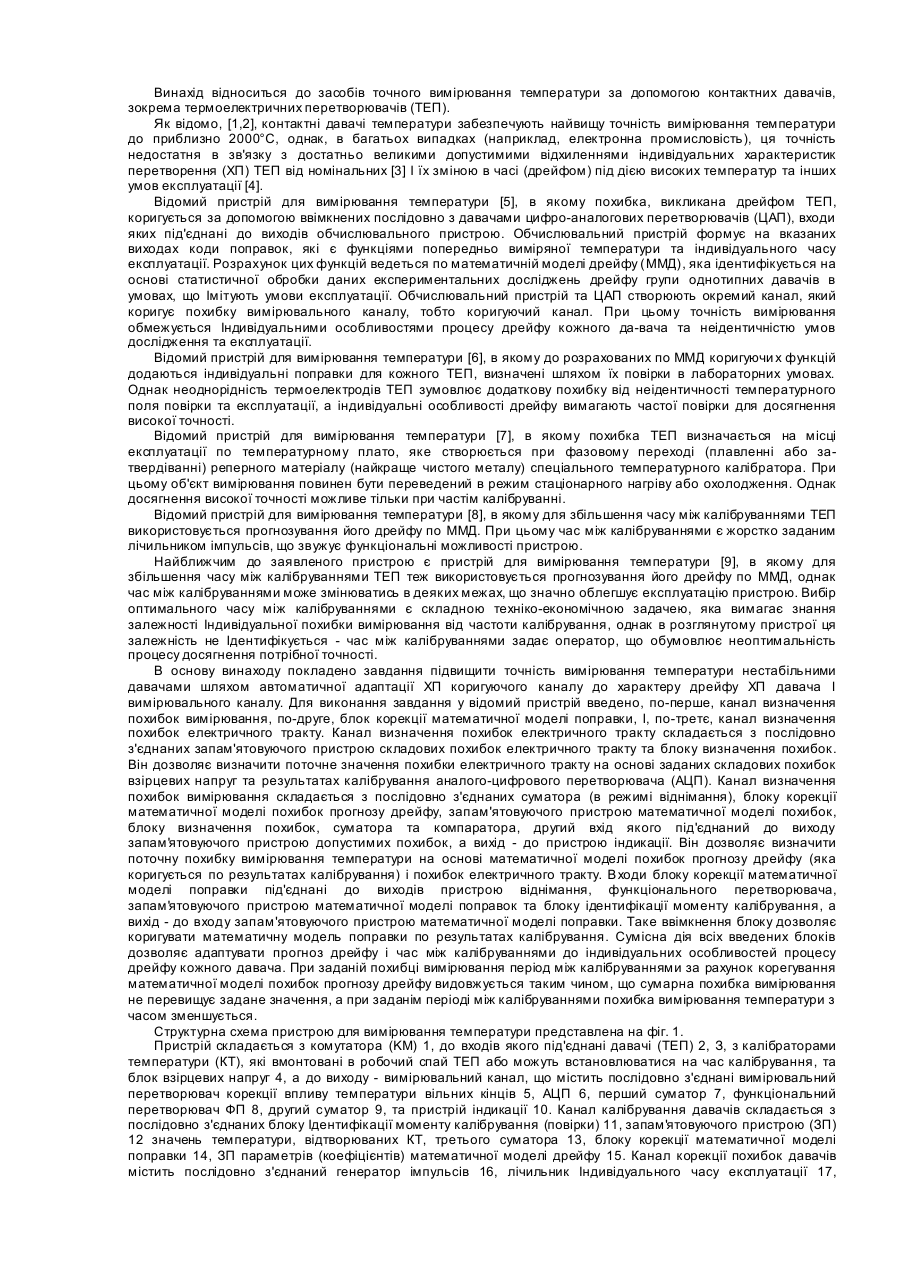
Пристрій для вимірювання температури, який складається, по-перше, з першого комутатора, до кожного робочого входу якого під'єднаний вихід давача температури, до кожного службового входу - вихід блоку зразкових напруг, а до виходу - вимірювальний канал, що містить послідовно з'єднані вимірювальний перетворювач корекції температури вільних кінців, аналого-цифровий перетворювач, перший суматор, функціональний перетворювач, другий суматор і пристрій індикації, по-друге, блоку корекції похибок електричного тракту, вхід якого під'єднаний до виходу аналого-цифрового перетворювача, а вихід - до другого входу першого суматора, по-третє, каналу корекції похибок давачів, що містить послідовно з'єднаний генератор, лічильник індивідуального часу експлуатації давачів, комутатор, блок визначення поправки, до якого під'єднаний запам'ятовуючий пристрій математичної моделі поправки, та, по-четверте, каналу калібрування, що містить послідовно з'єднаний блок Індентифікації моменту калібрування, запам'ятовуючий пристрій значень температури, відтворюваних температурним калібратором та третій суматор, причому вихід функціонального перетворювача під'єднаний до входів блоку ідентифікації моменту калібрування, другого входу третього суматора та блоку визначення поправки, вихід якого під'єднаний до входу другого суматора, який відрізняється тим, що в нього введено, по-перше, канал визначення похибок вимірювання, який складається з послідовно з'єднаних четвертого суматора, блоку корекції математичної моделі похибок, запам'ятовуючого пристрою математичної моделі похибок, блоку визначення похибок, п'ятого суматоpa, компаратора, другий вхід якого під'єднаний до виходу запам'ятовуючого пристрою допустимих похибок, а вихід - до пристрою індикації, по-друге, блоку корекції математичної моделі поправки, входи якого під'єднані до виходів першого пристрою віднімання, функціонального перетворювача, запам'ятовуючого пристрою математичної моделі поправок та блоку ідентифікації моменту калібрування, а вихід - до входу запам'ятовуючого пристрою математичної моделі поправки, та по-третє, під'єднаного до виходу аналого-цифрового перетворювача блоку визначення похибок електричного тракту, другий вхід якого під'єднаний до виходу запам'ятовуючого пристрою похибок електричного тракту, а вихід - до другого входу п'ятого суматора, вихід якого під'єднаний також до пристрою Індикації, причому входи третього суматора під'єднані до виходу запам'ятовуючого пристрою значень температури, відтворюваних температурним калібратором та виходу другого суматора, а вихід другого комутатора під'єднаний до входів блоків визначення поправок та похибок прогнозу дрейфу давачів, блоків корекції математичної моделі поправок та похибок прогнозу дрейфу давачів.
Текст
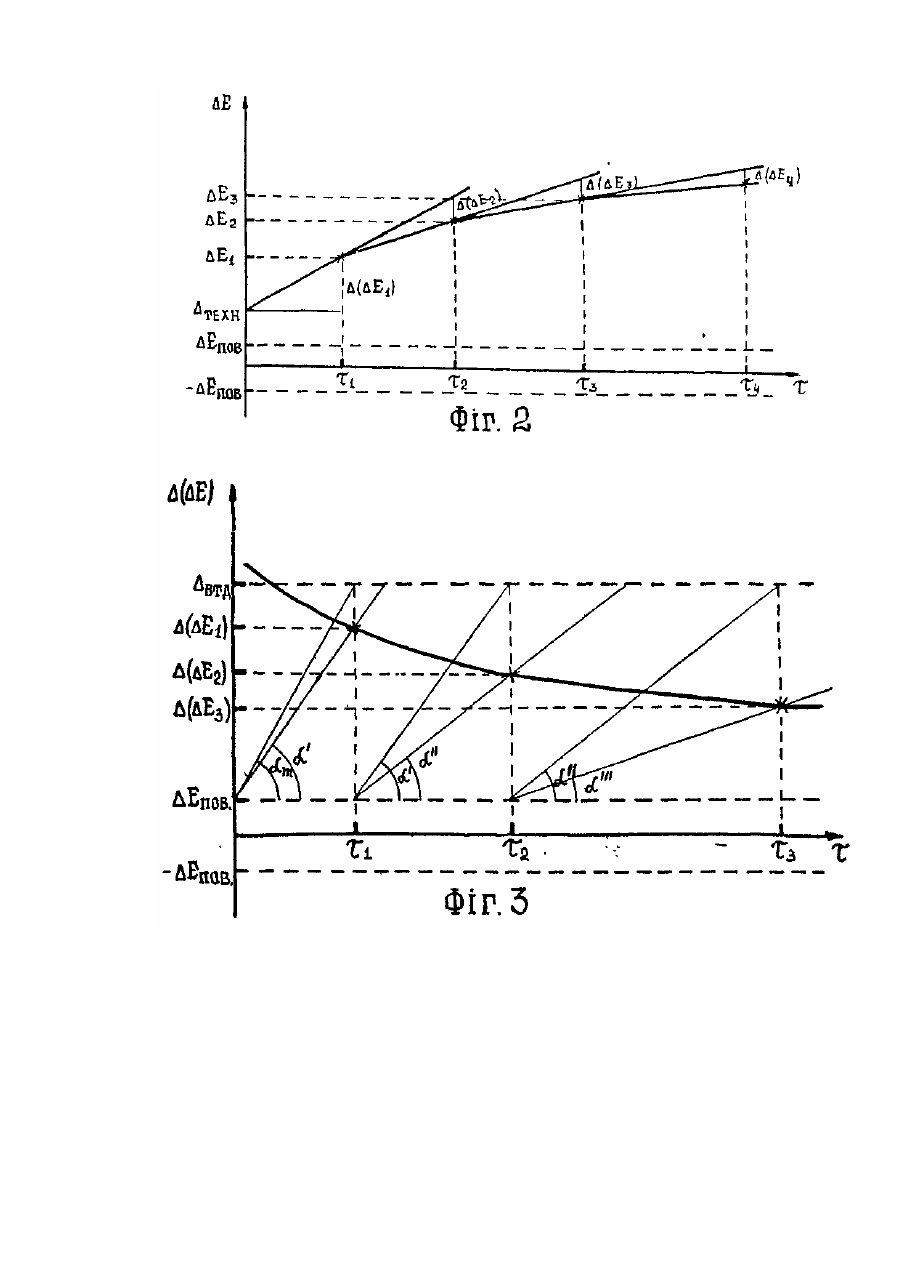
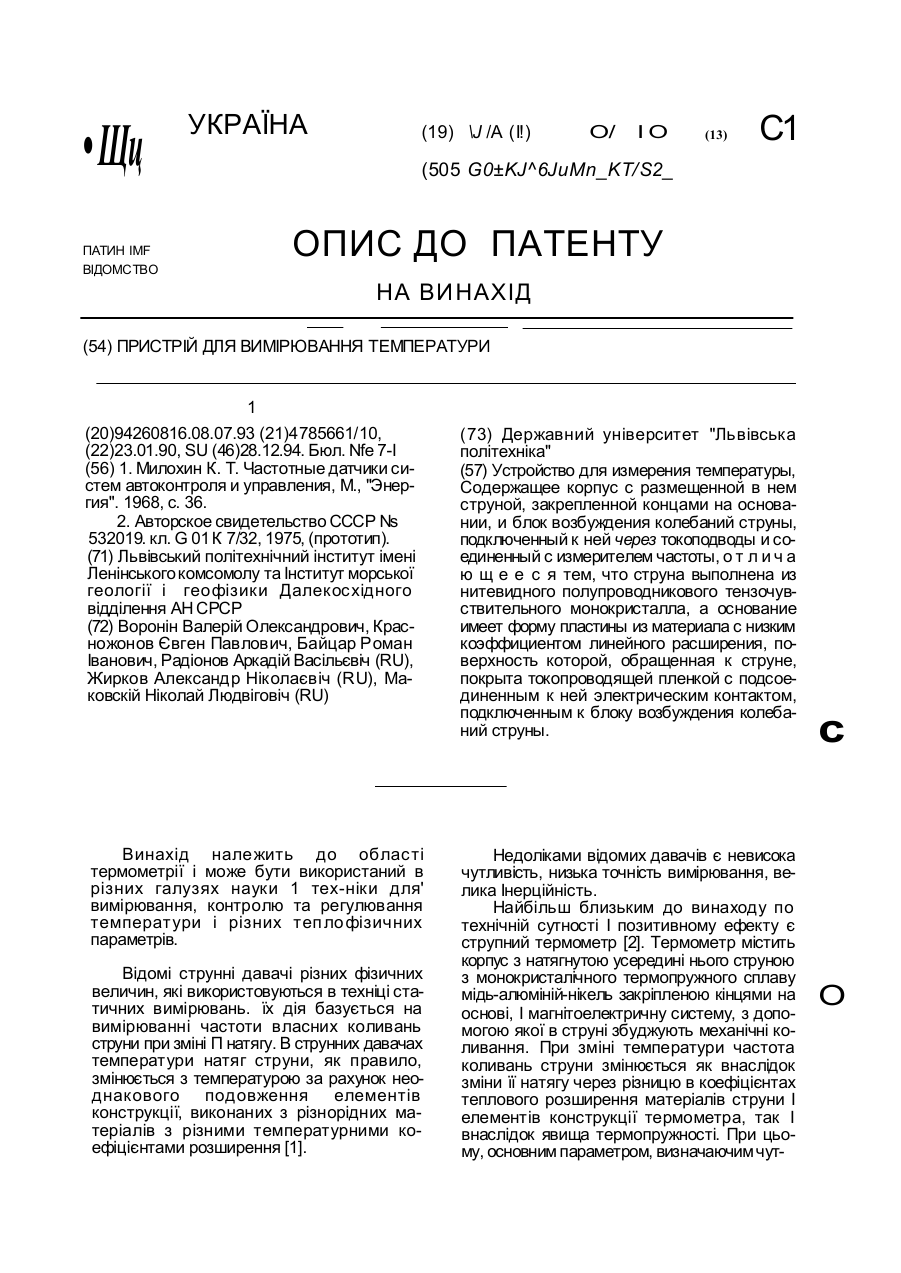
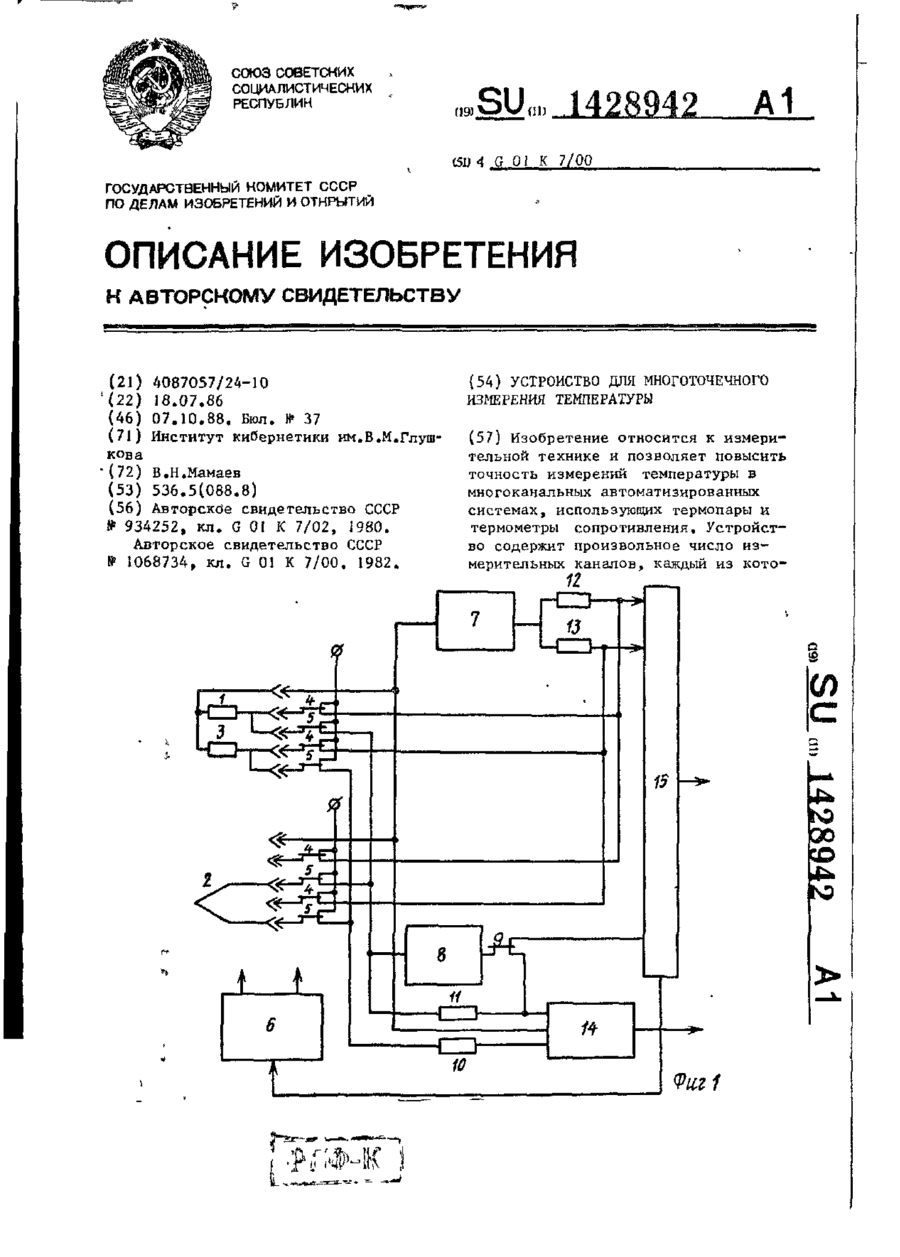
Винахід відноситься до засобів точного вимірювання температури за допомогою контактних давачів, зокрема термоелектричних перетворювачів (ТЕП). Як відомо, [1,2], контактні давачі температури забезпечують найвищу точність вимірювання температури до приблизно 2000°С, однак, в багатьох випадках (наприклад, електронна промисловість), ця точність недостатня в зв'язку з достатньо великими допустимими відхиленнями індивідуальних характеристик перетворення (ХП) ТЕП від номінальних [3] І їх зміною в часі (дрейфом) під дією високих температур та інших умов експлуатації [4]. Відомий пристрій для вимірювання температури [5], в якому похибка, викликана дрейфом ТЕП, коригується за допомогою ввімкнених послідовно з давачами цифро-аналогових перетворювачів (ЦАП), входи яких під'єднані до виходів обчислювального пристрою. Обчислювальний пристрій формує на вказаних виходах коди поправок, які є функціями попередньо виміряної температури та індивідуального часу експлуатації. Розрахунок цих функцій ведеться по математичній моделі дрейфу (ММД), яка ідентифікується на основі статистичної обробки даних експериментальних досліджень дрейфу групи однотипних давачів в умовах, що Імітують умови експлуатації. Обчислювальний пристрій та ЦАП створюють окремий канал, який коригує похибку вимірювального каналу, тобто коригуючий канал. При цьому точність вимірювання обмежується Індивідуальними особливостями процесу дрейфу кожного да-вача та неідентичністю умов дослідження та експлуатації. Відомий пристрій для вимірювання температури [6], в якому до розрахованих по ММД коригуючи х функцій додаються індивідуальні поправки для кожного ТЕП, визначені шляхом їх повірки в лабораторних умовах. Однак неоднорідність термоелектродів ТЕП зумовлює додаткову похибку від неідентичності температурного поля повірки та експлуатації, а індивідуальні особливості дрейфу вимагають частої повірки для досягнення високої точності. Відомий пристрій для вимірювання температури [7], в якому похибка ТЕП визначається на місці експлуатації по температурному плато, яке створюється при фазовому переході (плавленні або затвердіванні) реперного матеріалу (найкраще чистого металу) спеціального температурного калібратора. При цьому об'єкт вимірювання повинен бути переведений в режим стаціонарного нагріву або охолодження. Однак досягнення високої точності можливе тільки при частім калібруванні. Відомий пристрій для вимірювання температури [8], в якому для збільшення часу між калібруваннями ТЕП використовується прогнозування його дрейфу по ММД. При цьому час між калібруваннями є жорстко заданим лічильником імпульсів, що звужує функціональні можливості пристрою. Найближчим до заявленого пристрою є пристрій для вимірювання температури [9], в якому для збільшення часу між калібруваннями ТЕП теж використовується прогнозування його дрейфу по ММД, однак час між калібруваннями може змінюватись в деяких межах, що значно облегшує експлуатацію пристрою. Вибір оптимального часу між калібруваннями є складною техніко-економічною задачею, яка вимагає знання залежності Індивідуальної похибки вимірювання від частоти калібрування, однак в розглянутому пристрої ця залежність не Ідентифікується - час між калібруваннями задає оператор, що обумовлює неоптимальність процесу досягнення потрібної точності. В основу винаходу покладено завдання підвищити точність вимірювання температури нестабільними давачами шляхом автоматичної адаптації ХП коригуючого каналу до характеру дрейфу ХП давача І вимірювального каналу. Для виконання завдання у відомий пристрій введено, по-перше, канал визначення похибок вимірювання, по-друге, блок корекції математичної моделі поправки, І, по-третє, канал визначення похибок електричного тракту. Канал визначення похибок електричного тракту складається з послідовно з'єднаних запам'ятовуючого пристрою складових похибок електричного тракту та блоку визначення похибок. Він дозволяє визначити поточне значення похибки електричного тракту на основі заданих складових похибок взірцевих напруг та результатах калібрування аналого-цифрового перетворювача (АЦП). Канал визначення похибок вимірювання складається з послідовно з'єднаних суматора (в режимі віднімання), блоку корекції математичної моделі похибок прогнозу дрейфу, запам'ятовуючого пристрою математичної моделі похибок, блоку визначення похибок, суматора та компаратора, другий вхід якого під'єднаний до виходу запам'ятовуючого пристрою допустимих похибок, а вихід - до пристрою індикації. Він дозволяє визначити поточну похибку вимірювання температури на основі математичної моделі похибок прогнозу дрейфу (яка коригується по результатах калібрування) і похибок електричного тракту. Входи блоку корекції математичної моделі поправки під'єднані до виходів пристрою віднімання, функціонального перетворювача, запам'ятовуючого пристрою математичної моделі поправок та блоку ідентифікації моменту калібрування, а вихід - до входу запам'ятовуючого пристрою математичної моделі поправки. Таке ввімкнення блоку дозволяє коригувати математичну модель поправки по результатах калібрування. Сумісна дія всіх введених блоків дозволяє адаптувати прогноз дрейфу і час між калібруваннями до індивідуальних особливостей процесу дрейфу кожного давача. При заданій похибці вимірювання період між калібруваннями за рахунок корегування математичної моделі похибок прогнозу дрейфу видовжується таким чином, що сумарна похибка вимірювання не перевищує задане значення, а при заданім періоді між калібруваннями похибка вимірювання температури з часом зменшується. Структурна схема пристрою для вимірювання температури представлена на фіг. 1. Пристрій складається з комутатора (KM) 1, до входів якого під'єднані давачі (ТЕП) 2, З, з калібраторами температури (КТ), які вмонтовані в робочий спай ТЕП або можуть встановлюватися на час калібрування, та блок взірцевих напруг 4, а до виходу - вимірювальний канал, що містить послідовно з'єднані вимірювальний перетворювач корекції впливу температури вільних кінців 5, АЦП 6, перший суматор 7, функціональний перетворювач ФП 8, другий суматор 9, та пристрій індикації 10. Канал калібрування давачів складається з послідовно з'єднаних блоку Ідентифікації моменту калібрування (повірки) 11, запам'ятовуючого пристрою (ЗП) 12 значень температури, відтворюваних КТ, третього суматора 13, блоку корекції математичної моделі поправки 14, ЗП параметрів (коефіцієнтів) математичної моделі дрейфу 15. Канал корекції похибок давачів містить послідовно з'єднаний генератор імпульсів 16, лічильник Індивідуального часу експлуатації 17, комутатор 18, блок визначення поправок 19. Канал визначення похибок електричного тракту (ЕТ) складається з послідовно з'єднаних ЗП похибок елементів електричного тракту 20, блоку визначення його похибок 21 та блоку корекції електричного тракту 22. Канал визначення похибок вимірювання складається Із послідовно з'єднаних четвертого суматора 23, блоку корекції математичної моделі похибки прогнозу дрейфу давача 24, ЗП коефіцієнтів математичної моделі похибок 25, блоку визначення похибок 26, п'ятого суматора 27, компаратора 28, ЗП допустимих похибок вимірювання 29. Пристрій працює наступним чином. При підключенні нового давча 2,3 лічильник його індивідуального часу експлуатації 17 встановлюється в нульовий стан, в ЗП коефіцієнтів поправок 15 записуються нулі. В ЗП 12 записують значення температури, які відтворюються за допомогою КТ, в ЗП 29 -допустиму похибку вимірювання, в ЗП 25 - максимальні швидкості дрейфів, що відповідають різним температурам експлуатації, в ЗП 20 - похибки компонентів електричного тракту ЕТ. Пристрій працює в трьох режимах: "Калібрування ЕТ" (під час якого пристрій визначає систематичну та випадкову похибки ЕТ), "Уточнення прогнозу" (під час якого пристрій на основі результатів калібрування визначає та уточнює коефіцієнти математичних моделей прогнозу дрейфу та похибки прогнозу дрейфу) та власне "Вимірювання" (при якому використовуються математичні моделі прогнозу дрейфу та похибки прогнозу дрейфу, зокрема уточнені). Звичайно, пристрій працює в режимі "Вимірювання", при якому похибка дрейфу давача та похибка ЕТ прогнозуються І корегуються відповідними блоками на основі математичних моделей, що побудовані при роботі пристрою в режимах "Уточнення прогнозу" та "Калібрування ЕТ". При цьому одночасно визначається сумарна похибка вимірювання температури, яка порівнюється з допустимою, і, при перевищенні допустимої похибки, пристрій переходить в режим "Уточнення прогнозу". В зв'язку з тим, що цей режим вимагає спеціального режиму роботи об'єкту вимірювання температури (печі) на протязі відносно довгого часу (годин), його бажано виконувати якнайрідше. В цей же час режим "Калібрування ЕТ" не вимагає зміни режимів роботи об'єкту І виконується відносно швидко (секунди), тому він виконується досить часто (звичайно під час кожного циклу опитування давачів). Режим "Калібрування ЕТ" полягає в подачі на виділені канали комутатора 1 взірцевих електричних сигналів (для ТЕП - напруги) з блоку 4. Блок 22 порівнює коди результатів перетворення АЦП 6 з кодовими еквівалентами напруг, які формуються блоком 4 І на основі отриманих різниць виділяє поправки (систематична складова похибки ЕТ), які потім сумуються блоком 7 з кодами АЦП б і коригують тим самим похибку ЕТ. Така корекція дозволяє усун ути вплив систематичної складової похибки ЕТ, однак залишається випадкова складова (яку слід зменшити, наприклад, шляхом усереднення). Залишкова випадкова складова під час калібрування ЕТ визначається блоком 21 шляхом статистичної обробки результатів вимірювання де sет - середньоквадратичне відхилення, яке характеризує випадкову похибку; n - кількість вимірів при калібруванні ЕТ; Хі - поточний результат вимірювання; - математичне сподівання результатів виміру. Однак σβ τ не повністю характеризує похибку ЕТ в зв'язку з тим, що взірцеві напруги блок 4 не є абсолютно точні. Похибки блоків 1, 4, 5 зберігаються в блоці 20 (вони визначаються під час метрологічної атестації пристрою і заносяться в ЗП 20). Сумарна похибка ЕТ визначається блоком 21 на основі її складових по формулі де * - оператор, який виражає операцію сумування випадкових величин; Dвн - випадкова похибка взірцевих напруг; Dкм - випадкова похибка комутатора; Dквк - випадкова похибка компенсації температури вільних кінців; Dвим - κσет, де к - вибирається з таблиць відповідно до заданої довірчої Імовірності. Звичайно складові похибки є некорельовані і Dет можна визначити по формулі В режимі "Уточнення прогнозу" проходить визначення похибки давача, викликаної технологічним розкидом та часовим дрейфом ХП, шля хом проведення калібрування по температурному калібратору КТ. При цьому об'єкт вимірювання переводиться в режим постійного нагріву або охолодження. Момент фазового переходу, під час якого температура робочого кінця давача, що провіряється, за рахунок фазового переходу реперного матеріалу калібратора температури, залишається практично незмінною, ідентифікує блок 11. Одночасно блок 12 формує взірцевий еквівалент температури повірки, який поступає на третій суматор 13, на другий вхід якого поступає дійсне значення температури з блоку 8. Код похибки дрейфу давача записується в блок 14, на Інші входи якого поступають дійсне значення температури з блоку 8 та індивідуальний час експлуатації давача з блоку 18. На основі цих даних блок 14 обчис-лює коефіцієнти математичної моделі дрейфу. Коефіцієнти переписуються в блок 15 1 там зберігаються. Математична модель похибки прогнозу дрейфу давача обчислюється наступним чином. З блок 12 на четвертий суматор 23 поступає взірцевий еквівалент температури повірки, на другий вхід якого поступає скориговане по попередній математичній моделі дрейфу значення температури з блоку 9. Різниця з виходу блоку 23, яка характеризує неадекватність математичної моделі дрейфу поступає на блок 24, на Інші входи якого поступає прогнозоване значення дрейфу з блоку 14 та Індивідуальний час експлуатації з блоку 18. В блоці 24 відбувається визначення коефіцієнтів математичної моделі похибки прогнозу дрейфу. Ці коефіцієнти якої переписуються в блок 25 І там зберігаються. В режимі "Вимірювання" здійснюється постійне Індивідуальне прогнозування дрейфу давачів та корекція похибки ЕТІ введенням індивідуальної поправки для кожного вимірювального каналу температури. Давач, вибраний комутатором 1, перетворює температуру у відповідну термо-е.р.с, яка перетворюється блоками 5, 6 в код. Цей код сумується Із поправкою блоку корекції ЕТ 22 за допомогою першого суматора 7. На виході блоку ФП 8 утворюється код температури. На основі цього коду та Індивідуального часу експлуатації да-вача (визначається блоками 16, 17, 18) блок 19 формує поправку на результат вимірювання відповідним давачем. Поправка сумується з кодом температури в блоці 91 дає скориговане значення коду температури, яке поступає на блок 10. На основі коду температури І індивідуального часу експлуатації блок 26 формує, відповідно до індивідуальної математичної моделі, значення похибки прогнозу дрейфу давача, яке, після сумування з похибкою ЕТ в блоці 27, дає поточне значення похибки вимірювання температури. Похибка вимірювання температури разом з виміряним значенням температури Індикується в пристрої Індикації 10. якщо її значення не перевищує допустимої похибки вимірювання, яка задається блоком 29. У разі перевищення допустимої похибки вимірювання блок 28 дає додаткове повідомлення на пристрій індикації 10 та переводить пристрій в режим "Уточнення прогнозу". На фіг. 2 приведена крива дрейфу давача, яка побудована в процесі його роботи. Використовуючи режим "Уточнення прогнозу", визначається похибка давача при т= 0 і записується в блок 14. На проміжку часу τ є [0;ті] прогнозування похибки відбувається по прямій ΔΕ - Dтехн (обчисленій в блоці 18), де Dтехн - похибка, обумовлена початковим технологічним розкидом ХП давача. Час наступної повірки (див. фіг. 3) визначається із допустимого значення похибки вимірювання Dвтд (блок 29) І максимальної швидкості росту похибки дрейфу a м (блок 25) для даної температури експлуатації a м визначається експериментально, на основі аналізу процесів дрейфу давачів вданих умовах експлуатації). В точці t -tі (друга точка калібрування) дійсне значення дрейфу рівне ΔΕι , а значення похибки дрейфу, визначене блоком 24, становить Δ(ΑΕι ) На проміжку те [ t -tі ] прогнозування дрейфу давача відбувається в "прямій, проведеній через дві точки похибок давача, визначених в процесі попередніх калібрувань. Параметри прямої обчислюються в блоці 14. Прогнозування похибки прогнозу дрейфу давача (блок 26) відбувається по прямій, тангенс кута нахилу якої рівний тангенсу кута прямої, проведеної через дійсні значення похибок дрейфу на попередньому проміжку, обчисленій в блоці 24. Міжповірочний Інтервал складає де tga ш - швидкість наростання похибки прогнозу дрейфу; Δвтд i - доп устима похибка вимірювання температури; ΔΕпов і - похибка взірцевих засобів (калібраторів). При зростанні tga (при неадекватному прогнозі) пристрій для вимірювання температури скорочує міжповірочний інтервал для адаптації до дрейфу та навпаки. При ідеальному прогнозі спадною і наближається до своєї асимптоти lim ψ i ® ΔΕпов, тобто до похибки калібрування. Остання визначається похибками калібратора температури та електричного тракту. Пристрій-забезпечує високу точність вимірювання в складних умовах експлуатації давачів. Він реалізує: 1. Розрахунок поточної похибки вимірювання. 2. Адаптацію міжповірочного інтервалу до процесу дрейфу. 3. Самонавчання - зміну математичних моделей дрейфу та похибки дрейфу давачів відповідно до процесу дрейфу. По сукупності ознак даний пристрій можна віднести до Інтелектуальних вимірювальних засобів 5-го рівня [10]. Пристрій може використовуватися для точного вимірювання температури, зокрема для вимірювання температури проведення технологічних процесів дифузії, епітаксії, окислення в дифузійних печах в електронній промисловості, а також як складова частина прецизійних систем регулювання температури.
ДивитисяДодаткова інформація
Назва патенту англійськоюAppliance for measurement of temperature
Автори англійськоюKochan Volodymyr Volodymyrovych, Berezkyi Oleh Mykolaiovych
Назва патенту російськоюУстройство для измерения температуры
Автори російськоюКочан Владимир Владимирович, Березкий Олег Николаевич
МПК / Мітки
МПК: H01L 35/00, G01K 7/02
Мітки: температури, пристрій, вимірювання
Код посилання
<a href="https://ua.patents.su/5-23966-pristrijj-dlya-vimiryuvannya-temperaturi.html" target="_blank" rel="follow" title="База патентів України">Пристрій для вимірювання температури</a>
Пристрій для вимірювання температури
Номер патенту: 5718
Опубліковано: 28.12.1994
Автори: Красножонов Євген Павлович, Воронін Валерій Олександрович, Байцар Роман Іванович, Жирков Алєксандр Ніколаєвіч, Радіонов Аркадій Васільєвіч, Маковскій Ніколай Людвіговіч
Мітки: вимірювання, пристрій, температури
Формула / Реферат:
Устройство для измерения температуры, Содержащее корпус с размещенной в нем струной, закрепленной концами на основании, и блок возбуждения колебаний струны, подключенный к ней через токоподводы и соединенный с измерителем частоты, отличающееся тем, что струна выполнена из нитевидного полупроводникового тензочувствительного монокристалла, а основание имеет форму пластины из материала с низким коэффициентом линейного расширения, поверхность,...
Спосіб вимірювання температури термопарою і пристрій для його здійснення
Номер патенту: 12392
Опубліковано: 02.12.1996
Автори: Скрипник Юрій Олексійович, Дубровний Віктор Опанасович, Кондрашов Сергій Іванович, Санніков Володимир Юрійович
МПК: G01K 7/02
Мітки: здійснення, спосіб, вимірювання, пристрій, температури, термопарою
Формула / Реферат:
1. Спосіб вимірювання температури термопарою, суть якого у внесенні робочого кінця термопари в середовище, температуру якого вимірюють, регістрації термо-ЕРС на вільних кінцях термопари, нагріванні робочого кінця термопари пропусканням через термопару електричного струму і визначенні температури за формулою, який відрізняється тим, що пропускання електричного струму через термопару здійснюють протягом заданого часу, який вибирають в...
Пристрій для багатоканального вимірювання температури
Номер патенту: 4180
Опубліковано: 27.12.1994
Автор: Мамаєв Валерій Миколаєвич
МПК: G01K 7/00
Мітки: температури, багатоканального, вимірювання, пристрій
Формула / Реферат:
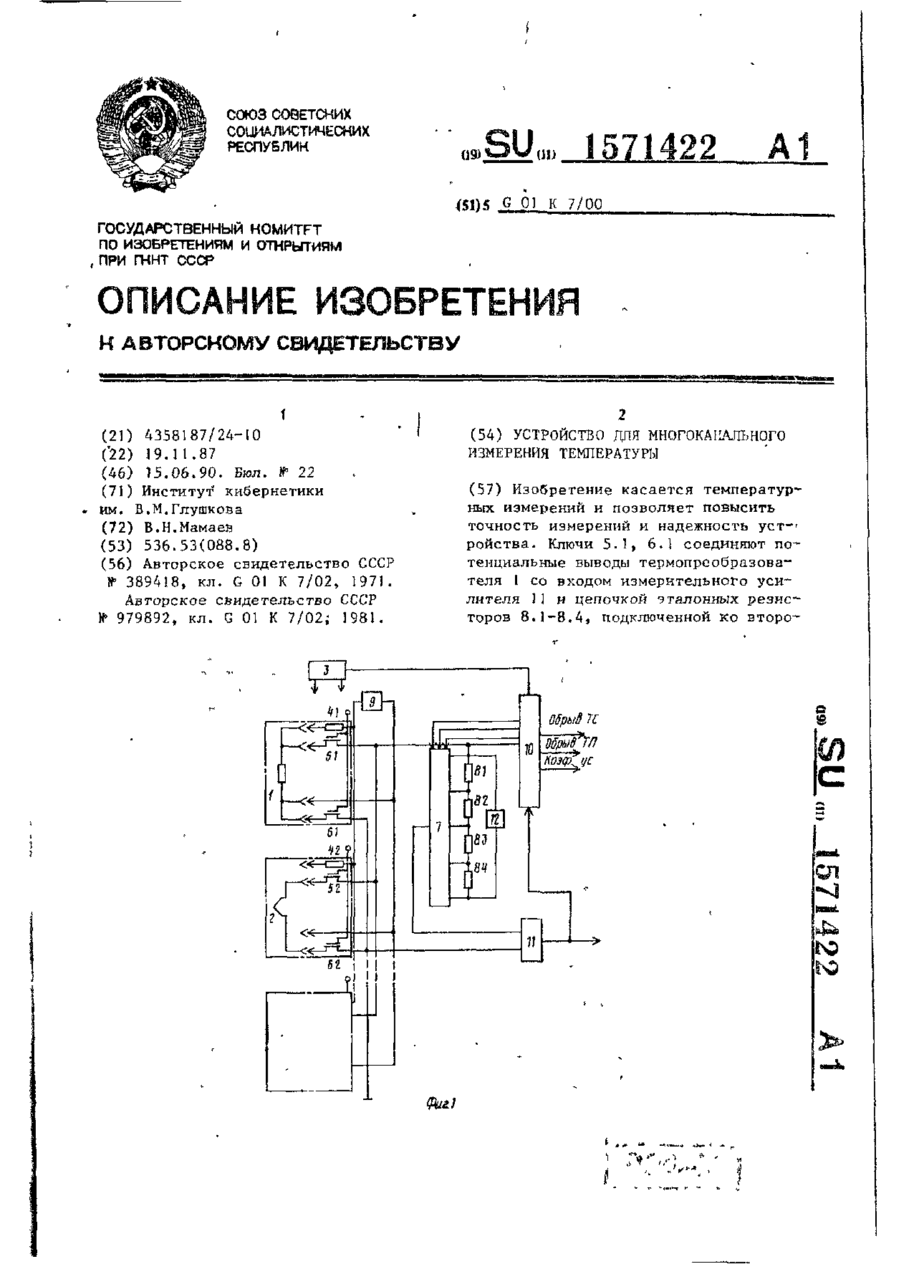
Устройство для многоканального измерения температуры, содержащее термоэлектрические преобразователи и термопрсобразователи сопротивления, каждый из которых подключен к входам первых и вторых ключей первого коммутатора, управляющие входы которого соединены с выходами блока переключения каналов, вход которого соединен с блоком управления, первый источник питания, цепочку последовательно соединенных эталонных резисторов, выводы которых...
Пристрій для вимірювання температури
Номер патенту: 4859
Опубліковано: 28.12.1994
Автори: Мамаєв Валерій Миколаєвич, Попов Анатолій Александрович, Лобачевський Георгій Степанович
МПК: G01J 5/20
Мітки: вимірювання, пристрій, температури
Формула / Реферат:
Устройство для измерения температуры, содержащее измерительный блок, телескоп, в основании которого расположен приемник излучения, термометр для измерения температуры телескопа, размещенный в задней стенке телескопа, отличающееся тем, что, с целью повышения точности, уменьшения габаритов устройства и уменьшения коэффициента визирования, приемная часть телескопа выполнена в виде сплошного цилиндра с отверстиями, расположенными под углом к...
Пристрій для багатоточкового вимірювання температури
Номер патенту: 4179
Опубліковано: 27.12.1994
Автор: Мамаєв Валерій Миколаєвич
МПК: G01K 7/02
Мітки: багатоточкового, вимірювання, пристрій, температури
Формула / Реферат:
Устройство для многоточечного измерения температуры, содержащее термометры сопротивления и термопары, подключенные через токовые и потенциальные управляемые ключи к входам измерительного блока, источник постоянного напряжения, потенциальная шина которого соединена с первыми выводами двух постоянных резисторов, источник постоянного тока, дополнительный управляемый ключ, образцовый резистор, блок переключения измерительных каналов, выходы...
Попередній патент: Пристрій управління частотою обертання колінчастого вала двигуна внутрішнього згоряння
Наступний патент: Hіж чеботарьова
Випадковий патент: Способи і пристрій для керування передачею базової станції