Доплеровський пеленгатор
Номер патенту: 24676
Опубліковано: 04.08.1998
Автори: Литвиненко Валентин Іванович, Бєліков Евген Миколайович, Лігінов Сергій Михайлович, Муратов Олександр Олексійович, Гудзюк Василь Петрович, Мєдвєдєв Сергій Леонідович, Сирма Олексій Олексійович
Формула / Реферат
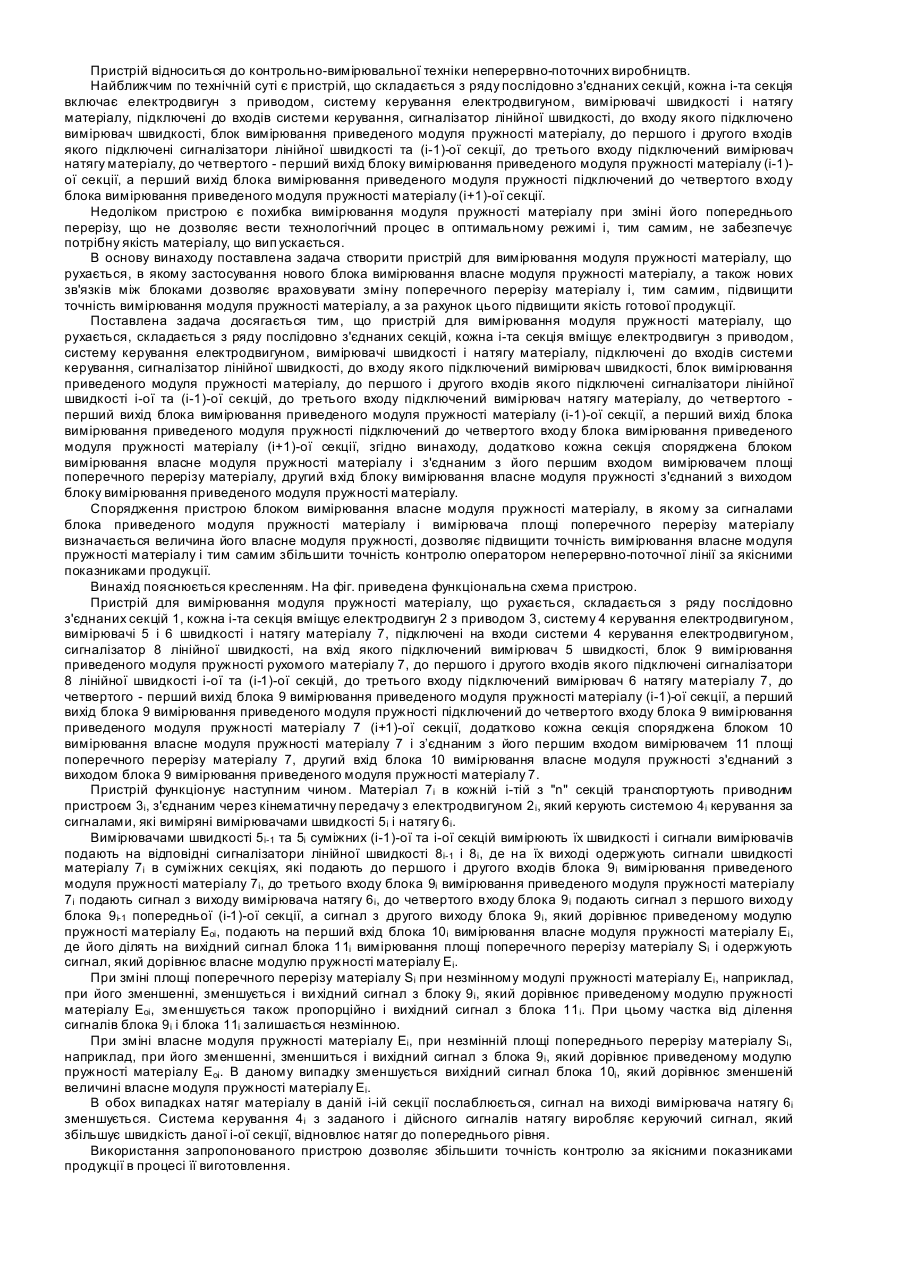
Доплеровський пеленгатор, що містить N пеленгаційних антен, еквідистантно розташованих по колу, що включають N симетричних вібраторів і N симетруючих пристроїв, причому N більше чи рівно 3, N-канальний комутатор, генератор імпульсів комутації, малошумлячий підсилювач, центральну антену та комплект апаратури пеленгування і керування, причому виходи симетруючих пристроїв підключені до входів N-канального комутатора, вихід якого підключений до входу малошумлячого підсилювача, вихід якого підключений до першого входу комплекта апаратури пеленгування і керування, другий вхід якого підключений до виходу центральної антени, а керуючий вихід підключений до входу генератора імпульсів комутації, виходи якого підключені до керуючих входів N-канального комутатора, який відрізняється тим, що між кожним симетричним вібратором і відповідним йому симетруючим пристроєм введено пару ключів, сигнальні входи яких підключені до виходів симетричного вібратора, виходи підключені до входів симетруючого пристрою, а керуючі входи об'єднані з відповідним управляючим входом N-канального комутатора.
Текст
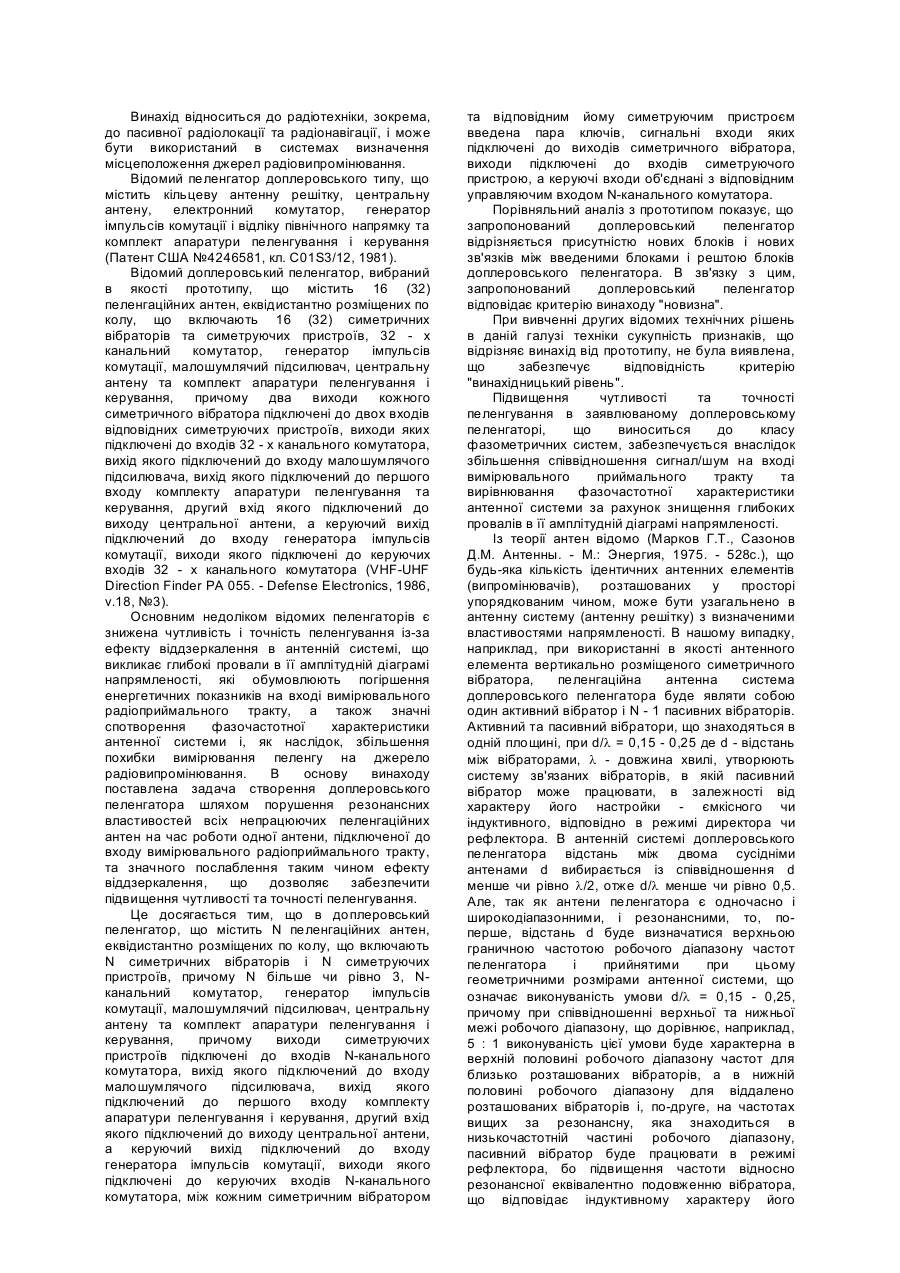
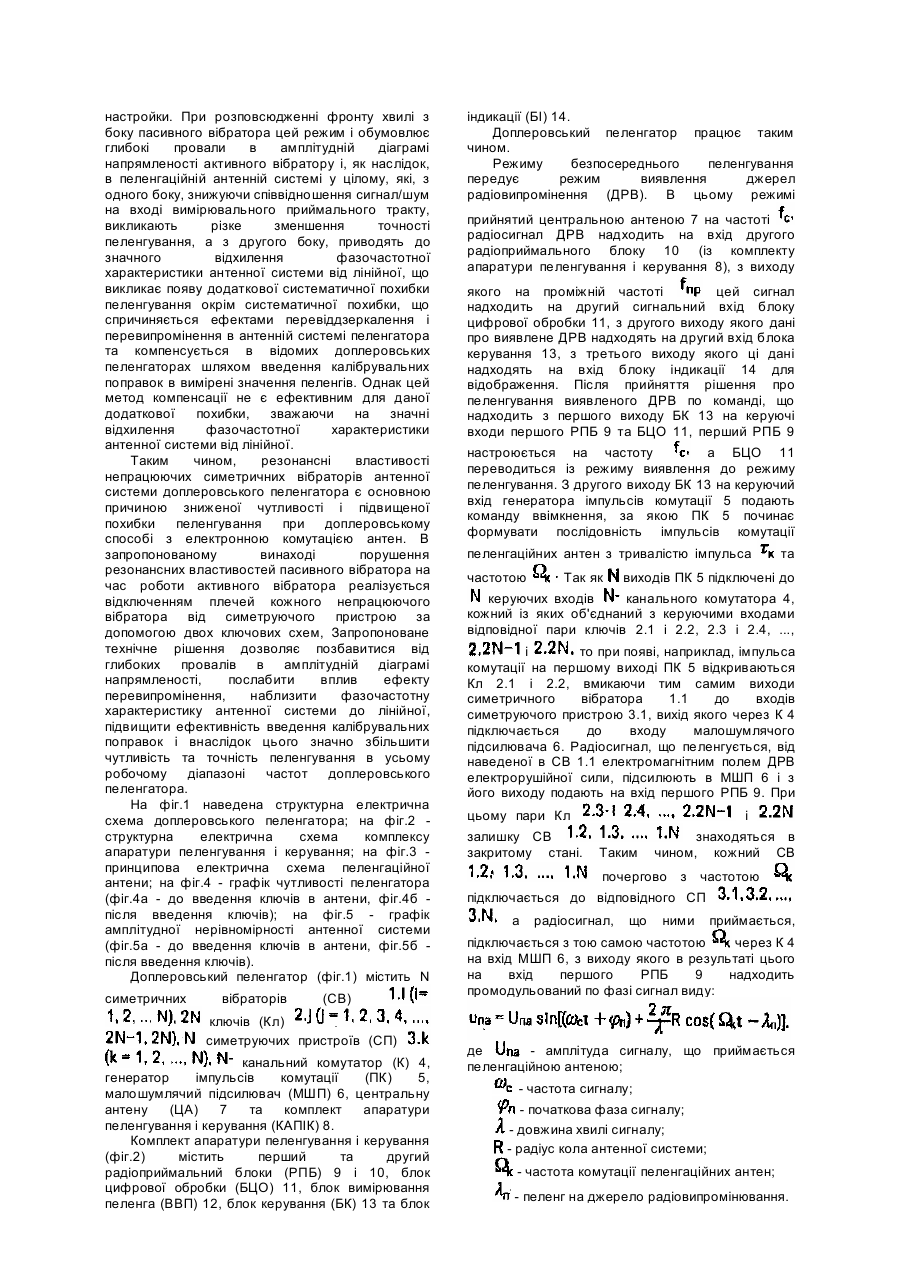
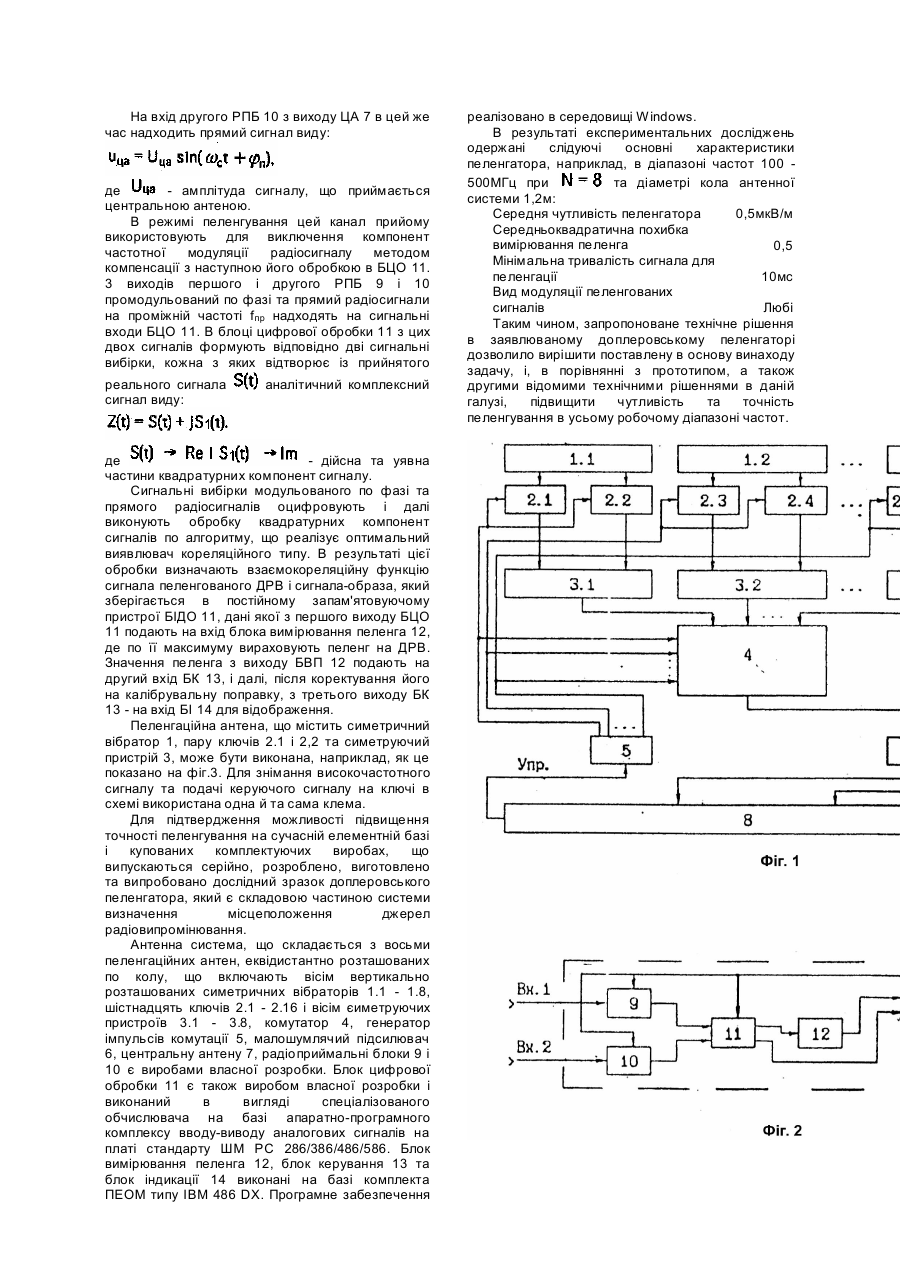
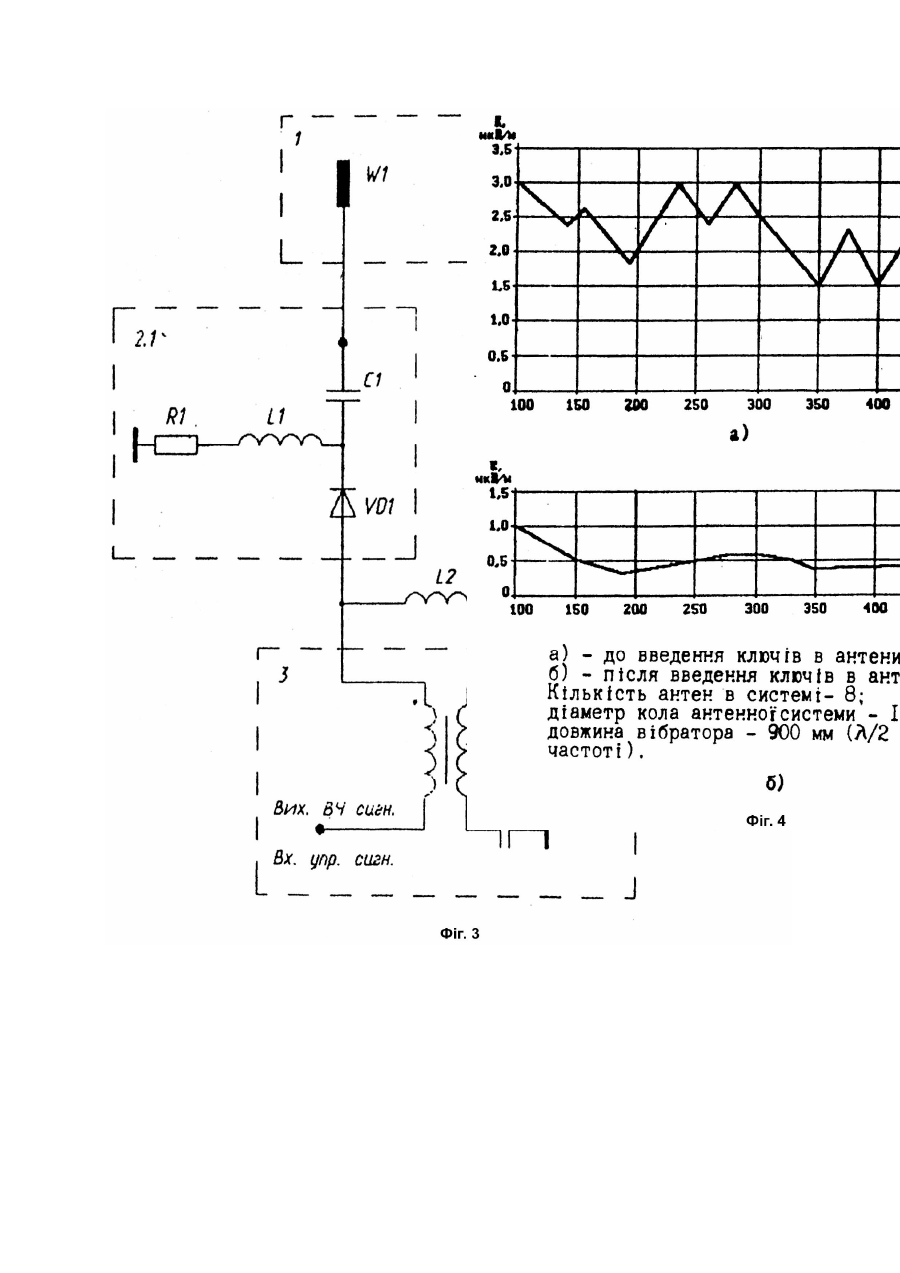
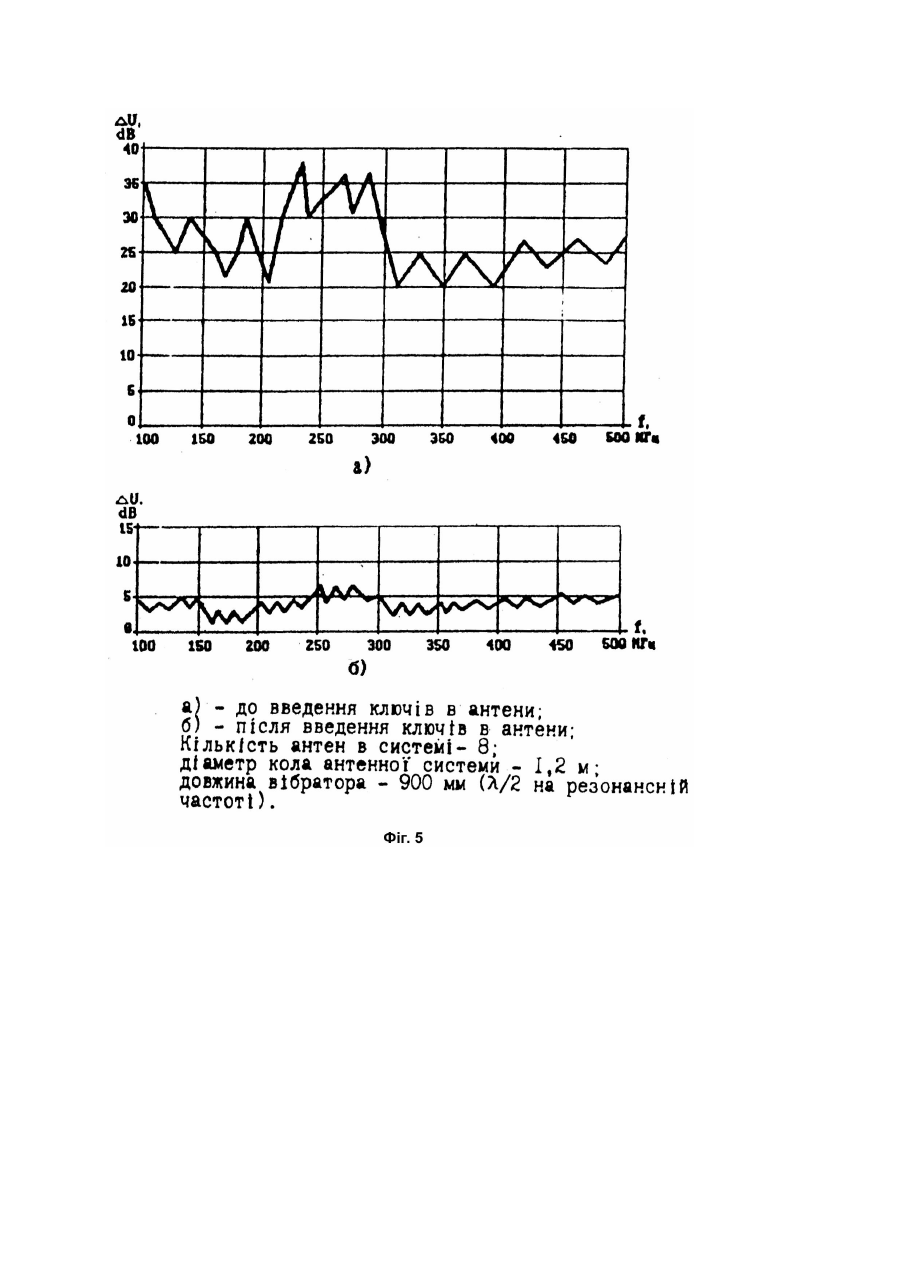
Винахід відноситься до радіотехніки, зокрема, до пасивної радіолокації та радіонавігації, і може бути використаний в системах визначення місцеположення джерел радіовипромінювання. Відомий пеленгатор доплеровського типу, що містить кільцеву антенну решітку, центральну антену, електронний комутатор, генератор імпульсів комутації і відліку північного напрямку та комплект апаратури пеленгування і керування (Патент США №4246581, кл. C01S3/12, 1981). Відомий доплеровський пеленгатор, вибраний в якості прототипу, що містить 16 (32) пеленгаційних антен, еквідистантно розміщених по колу, що включають 16 (32) симетричних вібраторів та симетруючих пристроїв, 32 - х канальний комутатор, генератор імпульсів комутації, малошумлячий підсилювач, центральну антену та комплект апаратури пеленгування і керування, причому два виходи кожного симетричного вібратора підключені до двох входів відповідних симетруючих пристроїв, виходи яких підключені до входів 32 - х канального комутатора, вихід якого підключений до входу малошумлячого підсилювача, вихід якого підключений до першого входу комплекту апаратури пеленгування та керування, другий вхід якого підключений до виходу центральної антени, а керуючий вихід підключений до входу генератора імпульсів комутації, виходи якого підключені до керуючих входів 32 - х канального комутатора (VHF-UHF Direction Finder PA 055. - Defense Electronics, 1986, v.18, №3). Основним недоліком відомих пеленгаторів є знижена чутливість і точність пеленгування із-за ефекту віддзеркалення в антенній системі, що викликає глибокі провали в її амплітудній діаграмі напрямленості, які обумовлюють погіршення енергетичних показників на вході вимірювального радіоприймального тракту, а також значні спотворення фазочастотної характеристики антенної системи і, як наслідок, збільшення похибки вимірювання пеленгу на джерело радіовипромінювання. В основу винаходу поставлена задача створення доплеровського пеленгатора шляхом порушення резонансних властивостей всіх непрацюючих пеленгаційних антен на час роботи одної антени, підключеної до входу вимірювального радіоприймального тракту, та значного послаблення таким чином ефекту віддзеркалення, що дозволяє забезпечити підвищення чутливості та точності пеленгування. Це досягається тим, що в доплеровський пеленгатор, що містить N пеленгаційних антен, еквідистантно розміщених по колу, що включають N симетричних вібраторів і N симетруючих пристроїв, причому N більше чи рівно 3, Nканальний комутатор, генератор імпульсів комутації, малошумлячий підсилювач, центральну антену та комплект апаратури пеленгування і керування, причому виходи симетруючих пристроїв підключені до входів N-канального комутатора, вихід якого підключений до входу малошумлячого підсилювача, вихід якого підключений до першого входу комплекту апаратури пеленгування і керування, другий вхід якого підключений до виходу центральної антени, а керуючий вихід підключений до входу генератора імпульсів комутації, виходи якого підключені до керуючих входів N-канального комутатора, між кожним симетричним вібратором та відповідним йому симетруючим пристроєм введена пара ключів, сигнальні входи яких підключені до виходів симетричного вібратора, виходи підключені до входів симетруючого пристрою, а керуючі входи об'єднані з відповідним управляючим входом N-канального комутатора. Порівняльний аналіз з прототипом показує, що запропонований доплеровський пеленгатор відрізняється присутністю нових блоків і нових зв'язків між введеними блоками і рештою блоків доплеровського пеленгатора. В зв'язку з цим, запропонований доплеровський пеленгатор відповідає критерію винаходу "новизна". При вивченні других відомих технічних рішень в даній галузі техніки сукупність признаків, що відрізняє винахід від прототипу, не була виявлена, що забезпечує відповідність критерію "винахідницький рівень". Підвищення чутливості та точності пеленгування в заявлюваному доплеровському пеленгаторі, що виноситься до класу фазометричних систем, забезпечується внаслідок збільшення співвідношення сигнал/шум на вході вимірювального приймального тракту та вирівнювання фазочастотної характеристики антенної системи за рахунок знищення глибоких провалів в її амплітудній діаграмі напрямленості. Із теорії антен відомо (Марков Г.Т., Сазонов Д.М. Антенны. - М.: Энергия, 1975. - 528с.), що будь-яка кількість ідентичних антенних елементів (випромінювачів), розташованих у просторі упорядкованим чином, може бути узагальнено в антенну систему (антенну решітку) з визначеними властивостями напрямленості. В нашому випадку, наприклад, при використанні в якості антенного елемента вертикально розміщеного симетричного вібратора, пеленгаційна антенна система доплеровського пеленгатора буде являти собою один активний вібратор і N - 1 пасивних вібраторів. Активний та пасивний вібратори, що знаходяться в одній площині, при d/l = 0,15 - 0,25 де d - відстань між вібраторами, l - довжина хвилі, утворюють систему зв'язаних вібраторів, в якій пасивний вібратор може працювати, в залежності від характеру його настройки - ємкісного чи індуктивного, відповідно в режимі директора чи рефлектора. В антенній системі доплеровського пеленгатора відстань між двома сусідніми антенами d вибирається із співвідношення d менше чи рівно l/2, отже d/l менше чи рівно 0,5. Але, так як антени пеленгатора є одночасно і широкодіапазонними, і резонансними, то, поперше, відстань d буде визначатися верхньою граничною частотою робочого діапазону частот пеленгатора і прийнятими при цьому геометричними розмірами антенної системи, що означає виконуваність умови d/l = 0,15 - 0,25, причому при співвідношенні верхньої та нижньої межі робочого діапазону, що дорівнює, наприклад, 5 : 1 виконуваність цієї умови буде характерна в верхній половині робочого діапазону частот для близько розташованих вібраторів, а в нижній половині робочого діапазону для віддалено розташованих вібраторів і, по-друге, на частотах вищих за резонансну, яка знаходиться в низькочастотній частині робочого діапазону, пасивний вібратор буде працювати в режимі рефлектора, бо підвищення частоти відносно резонансної еквівалентно подовженню вібратора, що відповідає індуктивному характеру його настройки. При розповсюдженні фронту хвилі з боку пасивного вібратора цей режим і обумовлює глибокі провали в амплітудній діаграмі напрямленості активного вібратору і, як наслідок, в пеленгаційній антенній системі у цілому, які, з одного боку, знижуючи співвідношення сигнал/шум на вході вимірювального приймального тракту, викликають різке зменшення точності пеленгування, а з другого боку, приводять до значного відхилення фазочастотної характеристики антенної системи від лінійної, що викликає появу додаткової систематичної похибки пеленгування окрім систематичної похибки, що спричиняється ефектами перевіддзеркалення і перевипромінення в антенній системі пеленгатора та компенсується в відомих доплеровських пеленгаторах шляхом введення калібрувальних поправок в вимірені значення пеленгів. Однак цей метод компенсації не є ефективним для даної додаткової похибки, зважаючи на значні відхилення фазочастотної характеристики антенної системи від лінійної. Таким чином, резонансні властивості непрацюючих симетричних вібраторів антенної системи доплеровського пеленгатора є основною причиною зниженої чутливості і підвищеної похибки пеленгування при доплеровському способі з електронною комутацією антен. В запропонованому винаході порушення резонансних властивостей пасивного вібратора на час роботи активного вібратора реалізується відключенням плечей кожного непрацюючого вібратора від симетруючого пристрою за допомогою двох ключових схем, Запропоноване технічне рішення дозволяє позбавитися від глибоких провалів в амплітудній діаграмі напрямленості, послабити вплив ефекту перевипромінення, наблизити фазочастотну характеристику антенної системи до лінійної, підвищити ефективність введення калібрувальних поправок і внаслідок цього значно збільшити чутливість та точність пеленгування в усьому робочому діапазоні частот доплеровського пеленгатора. На фіг.1 наведена структурна електрична схема доплеровського пеленгатора; на фіг.2 структурна електрична схема комплексу апаратури пеленгування і керування; на фіг.3 принципова електрична схема пеленгаційної антени; на фіг.4 - графік чутливості пеленгатора (фіг.4а - до введення ключів в антени, фіг.4б після введення ключів); на фіг.5 - графік амплітудної нерівномірності антенної системи (фіг.5а - до введення ключів в антени, фіг.5б після введення ключів). Доплеровський пеленгатор (фіг.1) містить N симетричних вібраторів (СВ) ключів (Кл) симетруючих пристроїв (СП) канальний комутатор (К) 4, генератор імпульсів комутації (ПК) 5, малошумлячий підсилювач (МШП) 6, центральну антену (ЦА) 7 та комплект апаратури пеленгування і керування (КАПІК) 8. Комплект апаратури пеленгування і керування (фіг.2) містить перший та другий радіоприймальний блоки (РПБ) 9 і 10, блок цифрової обробки (БЦО) 11, блок вимірювання пеленга (ВВП) 12, блок керування (БК) 13 та блок індикації (БІ) 14. Доплеровський пеленгатор працює таким чином. Режиму безпосереднього пеленгування передує режим виявлення джерел радіовипромінення (ДРВ). В цьому режимі прийнятий центральною антеною 7 на частоті радіосигнал ДРВ надходить на вхід другого радіоприймального блоку 10 (із комплекту апаратури пеленгування і керування 8), з виходу якого на проміжній частоті цей сигнал надходить на другий сигнальний вхід блоку цифрової обробки 11, з другого виходу якого дані про виявлене ДРВ надходять на другий вхід блока керування 13, з третього виходу якого ці дані надходять на вхід блоку індикації 14 для відображення. Після прийняття рішення про пеленгування виявленого ДРВ по команді, що надходить з першого виходу БК 13 на керуючі входи першого РПБ 9 та БЦО 11, перший РПБ 9 настроюється на частоту а БЦО 11 переводиться із режиму виявлення до режиму пеленгування. З другого виходу БК 13 на керуючий вхід генератора імпульсів комутації 5 подають команду ввімкнення, за якою ПК 5 починає формувати послідовність імпульсів комутації пеленгаційних антен з тривалістю імпульса частотою Так як та виходів ПК 5 підключені до керуючих входів канального комутатора 4, кожний із яких об'єднаний з керуючими входами відповідної пари ключів 2.1 і 2.2, 2.3 і 2.4, ..., і то при появі, наприклад, імпульса комутації на першому виході ПК 5 відкриваються Кл 2.1 і 2.2, вмикаючи тим самим виходи симетричного вібратора 1.1 до входів симетруючого пристрою 3.1, вихід якого через К 4 підключається до входу малошумлячого підсилювача 6. Радіосигнал, що пеленгується, від наведеної в СВ 1.1 електромагнітним полем ДРВ електрорушійної сили, підсилюють в МШП 6 і з його виходу подають на вхід першого РПБ 9. При цьому пари Кл залишку СВ закритому стані. і Таким знаходяться в чином, кожний СВ почергово з частотою підключається до відповідного СП а радіосигнал, що ними приймається, підключається з тою самою частотою через К 4 на вхід МШП 6, з виходу якого в результаті цього на вхід першого РПБ 9 надходить промодульований по фазі сигнал виду: де - амплітуда сигналу, що приймається пеленгаційною антеною; - частота сигналу; - початкова фаза сигналу; - довжина хвилі сигналу; - радіус кола антенної системи; - частота комутації пеленгаційних антен; - пеленг на джерело радіовипромінювання. На вхід другого РПБ 10 з виходу ЦА 7 в цей же час надходить прямий сигнал виду: де - амплітуда сигналу, що приймається центральною антеною. В режимі пеленгування цей канал прийому використовують для виключення компонент частотної модуляції радіосигналу методом компенсації з наступною його обробкою в БЦО 11. 3 виходів першого і другого РПБ 9 і 10 промодульований по фазі та прямий радіосигнали на проміжній частоті f пр надходять на сигнальні входи БЦО 11. В блоці цифрової обробки 11 з цих двох сигналів формують відповідно дві сигнальні вибірки, кожна з яких відтворює із прийнятого реального сигнала сигнал виду: аналітичний комплексний де - дійсна та уявна частини квадратурних компонент сигналу. Сигнальні вибірки модульованого по фазі та прямого радіосигналів оцифровують і далі виконують обробку квадратурних компонент сигналів по алгоритму, що реалізує оптимальний виявлювач кореляційного типу. В результаті цієї обробки визначають взаємокореляційну функцію сигнала пеленгованого ДРВ і сигнала-образа, який зберігається в постійному запам'ятовуючому пристрої БІДО 11, дані якої з першого виходу БЦО 11 подають на вхід блока вимірювання пеленга 12, де по її максимуму вираховують пеленг на ДРВ. Значення пеленга з виходу БВП 12 подають на другий вхід БК 13, і далі, після коректування його на калібрувальну поправку, з третього виходу БК 13 - на вхід БІ 14 для відображення. Пеленгаційна антена, що містить симетричний вібратор 1, пару ключів 2.1 і 2,2 та симетруючий пристрій 3, може бути виконана, наприклад, як це показано на фіг.3. Для знімання високочастотного сигналу та подачі керуючого сигналу на ключі в схемі використана одна й та сама клема. Для підтвердження можливості підвищення точності пеленгування на сучасній елементній базі і купованих комплектуючих виробах, що випускаються серійно, розроблено, виготовлено та випробовано дослідний зразок доплеровського пеленгатора, який є складовою частиною системи визначення місцеположення джерел радіовипромінювання. Антенна система, що складається з восьми пеленгаційних антен, еквідистантно розташованих по колу, що включають вісім вертикально розташованих симетричних вібраторів 1.1 - 1.8, шістнадцять ключів 2.1 - 2.16 і вісім єиметруючих пристроїв 3.1 - 3.8, комутатор 4, генератор імпульсів комутації 5, малошумлячий підсилювач 6, центральну антену 7, радіоприймальні блоки 9 і 10 є виробами власної розробки. Блок цифрової обробки 11 є також виробом власної розробки і виконаний в вигляді спеціалізованого обчислювача на базі апаратно-програмного комплексу вводу-виводу аналогових сигналів на платі стандарту ШМ PC 286/386/486/586. Блок вимірювання пеленга 12, блок керування 13 та блок індикації 14 виконані на базі комплекта ПЕОМ типу IBM 486 DX. Програмне забезпечення реалізовано в середовищі Windows. В результаті експериментальних досліджень одержані слідуючі основні характеристики пеленгатора, наприклад, в діапазоні частот 100 500МГц при та діаметрі кола антенної системи 1,2м: Середня чутливість пеленгатора 0,5мкВ/м Середньоквадратична похибка вимірювання пеленга 0,5 Мінімальна тривалість сигнала для пеленгації 10мс Вид модуляції пеленгованих сигналів Любі Таким чином, запропоноване технічне рішення в заявлюваному доплеровському пеленгаторі дозволило вирішити поставлену в основу винаходу задачу, і, в порівнянні з прототипом, а також другими відомими технічними рішеннями в даній галузі, підвищити чутливість та точність пеленгування в усьому робочому діапазоні частот.
ДивитисяДодаткова інформація
Автори англійськоюLihinov Serhii Mykhailovych, Lihinov Serhii Mykhailovych, Maltsev Vadym Oleksandrovych, Lytvynenko Valentyn Ivanovych, Baskakov Yurii Heorhiiovych, Hudziuk Vasyl Petrovych
Автори російськоюЛигинов Сергей Михайлович, Лигинов Сергей Михайлович, Мальцев Вадим Александрович, Литвиненко Валентин Иванович, Баскаков Юрий Георгиевич, Гудзюк Василий Петрович
МПК / Мітки
МПК: G01S 3/14
Мітки: доплеровський, пеленгатор
Код посилання
<a href="https://ua.patents.su/5-24676-doplerovskijj-pelengator.html" target="_blank" rel="follow" title="База патентів України">Доплеровський пеленгатор</a>
Перетворювач фаза-код
Номер патенту: 18766
Опубліковано: 25.12.1997
Автори: Юриш Сергій Юрійович, Дудикевич Валерій Богданович, Горбатюк Станислав Миколайович, Отенко Віктор Іванович, Суп'ян Веніамін Яковлевич, Максимович Володимир Миколайович
МПК: G01R 25/00
Мітки: перетворювач, фаза-код
Формула / Реферат:
Перетворювач фаза-код, що містить два вхідні формувачі, генератор тактових імпульсів, блок керування, схему віднімання, два лічильники, два комбінаційних елементи І-АБО, керуючі входи першого комбінаційного елемента І-АБО підключені до розрядів першого лічильника, сигнальні до розрядів другого лічильника, керуючі входи другого комбінаційного елемента І-АБО підключені до розрядів другого лічильника, Сигнальні - до розрядів першого лічильника,...
Багатоканальний пеленгатор джерел випромінювання сигналів шумового походження
Номер патенту: 21580
Опубліковано: 06.01.1998
Автори: Парфенюк Василь Григорович, П'ясковський Дмитро Володимирович, КУБРАК ОЛЕКСАНДР МИКОЛАЙОВИЧ
МПК: G01S 3/00
Мітки: джерел, пеленгатор, походження, випромінювання, багатоканальний, сигналів, шумового
Формула / Реферат:
Многоканальный пеленгатор источников излучения сигналов шумового происхождения, содержащий антенную решетку (АР), каждый i-тый выход элементов которой, подключен к последовательно соединенным линейному тракту аналоговых приемных модулей (ЛТАПМ) и аналого-цифровому преобразователю (АЦП), выходы которых подключены к входам решающего устройства (РУ), определяющего оцененное значение угловой координаты к-го источника излучения сигнала...
Пеленгатор для визначення кутових координат джерела імпульсного несинусоїдального сигналу
Номер патенту: 15412
Опубліковано: 30.06.1997
Автори: Родін Олександр Валерійович, Хом'яков Олег Миколайович, Жуков Сергій Анатолійович, Бахвалов Борис Миколайович
МПК: G01S 17/06
Мітки: пеленгатор, імпульсного, джерела, несинусоїдального, координат, кутових, сигналу, визначення
Формула / Реферат:
Пеленгатор для определения угловых координат источника импульсного несинусоидального сигнала, содержащий приемную антенну с механизмом вращения антенны по азимуту, последовательно соединенную с приемником, отличающийся тем, что приемная антенна выполнена в виде металлического уголкового рефлектора, в нижней плоскости которого установлен экран из поглощающего материала, и вертикально расположенного проволочного вибратора, выход которого...
Пристрій для вимірювання модуля пружності матеріалу, що рухається
Номер патенту: 3238
Опубліковано: 26.12.1994
Автори: Винницький Володимир Миколайович, Щепан Роман Ярославович, Лонкевич Євген Сергійович
МПК: G01B 5/30, B23P 25/00
Мітки: модуля, рухається, матеріалу, пристрій, вимірювання, пружності
Формула / Реферат:
Устройство для измерения модуля упругости движущегося материала, содержащее ряд последовательно соединенных секций, каждая i-я секция включает электродвигатель с приводом, систему управления электродвигателем, измерители скорости и натяжения материала, подключенные ко входам системы управления, сигнализатор линейной скорости, ко входу которого подключен измеритель скорости, блок измерения приведенного модуля упругости материала, к первому и...
Цифровий інтенсиметр
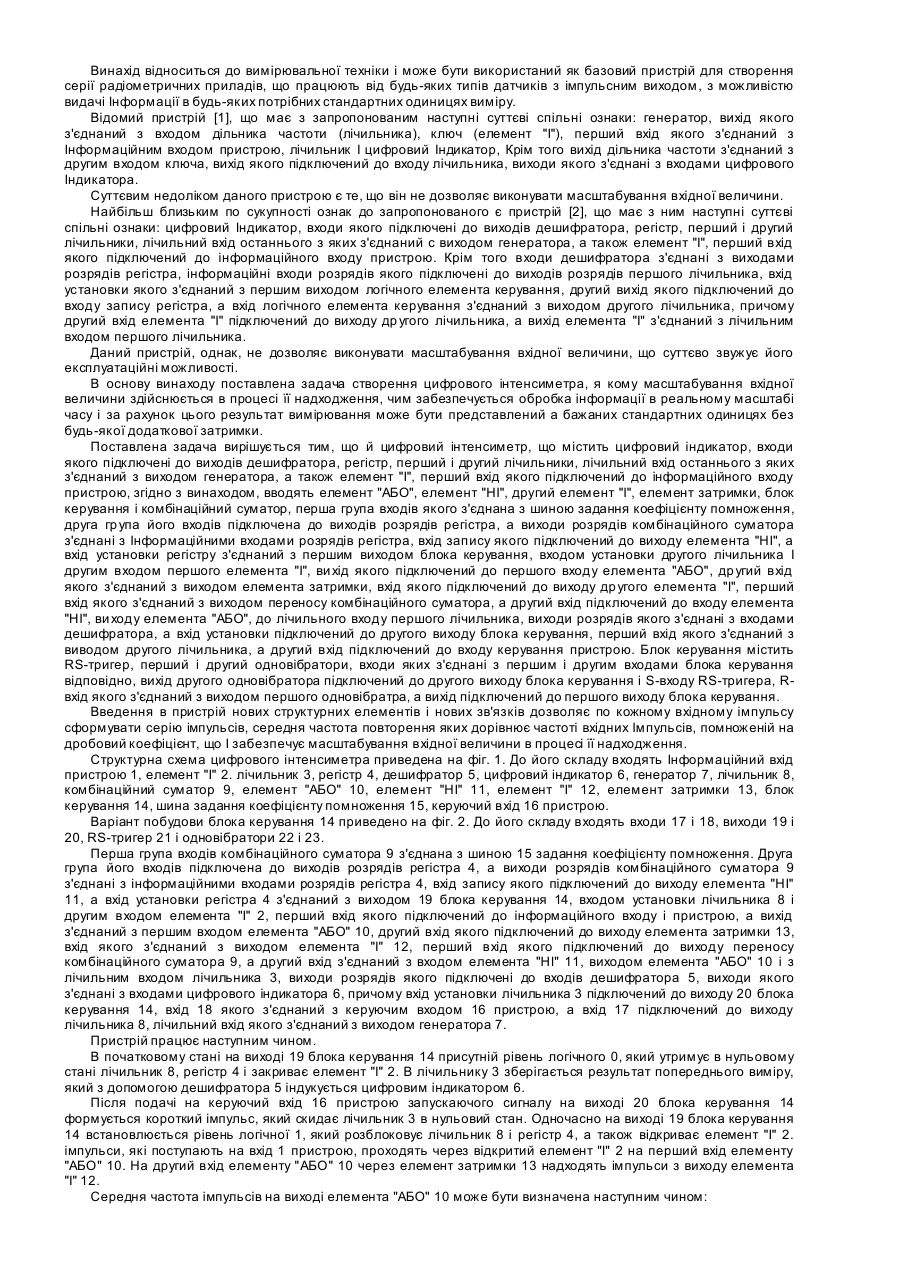
Номер патенту: 1957
Опубліковано: 20.12.1994
Автори: Сторонський Юрій Богданович, Радутний Ігорь Констянтинович, Максимович Володимир Миколайович, Озеров Борис Георгійович, Дудикевич Валерій Богданович
МПК: G01T 1/16
Мітки: цифровий, інтенсиметр
Формула / Реферат:
1. Цифровой интенсиметр, содержащий цифровой индикатор, входы которого подключены к выходам дешифратора, регистр, первый и второй счетчики, счетный вход последнего из которых соединен с выходом генератора, а также элемент И, первый вход которого подключен к информационному входу устройства, отличающийся тем, что в него введены элемент ИЛИ, элемент НЕ, второй элемент И, элемент задержки, блок управления и комбинационный сумматор, первая группа...
Попередній патент: Спосіб моделювання остеоартрозу
Наступний патент: Енергопоглинаючий пристрій протиударного бампера автомобіля
Випадковий патент: Система завадозахисту