Датчик лінійних переміщень
Номер патенту: 26943
Опубліковано: 10.10.2007
Формула / Реферат
1. Датчик лінійних переміщень, що містить корпус та шток, який відрізняється тим, що до його складу введено об'ємну призму, ходовий ролик, вісь якого зв'язана з пружним елементом, який зв'язаний з рухомою рамою, що з'єднана з корпусом за допомогою пружного елементу, у рухомій рамі розташований струнний перетворювач інформації, який містить дві струнні пружні розтяжки, закріплені одними своїми кінцями на рухомому вузлі закріплення, другими - на бокових вузлах закріплення, а кожна струнна пружна розтяжка знаходиться у полі постійного магніту, а рухомий вузол закріплення з'єднаний з рухомою рамою за допомогою пружних елементів, розташованих симетрично відносно поздовжньої осі рами, нерухомі вузли закріплення струнних пружинних розтяжок з'єднані з корпусом за допомогою жорстких штифтів, нерухомо закріплених в корпусі, систему обробки інформації.
2. Датчик лінійних переміщень за п. 1, який відрізняється тим, що система обробки інформації включає два ідентичних канали, кожний з яких складається з автогенератора, блока узгодження, пристрою керування перетворювачем, перетворювача кількості імпульсів в код, генератора заповнювальних імпульсів та вихідного буферного регістра, причому вихід генератора з'єднаний зі входом блока узгодження, послідовно зв'язаного з пристроєм керування, один вихід якого підключений до першого входу перетворювача кількості імпульсів в код, а другий вихід - до першого керуючого входу вихідного буферного регістра, з інформаційним входом якого з'єднаний вихід перетворювача кількості імпульсів в код, а другий керуючий вхід вихідного буферного регістра з'єднаний з вихідним портом обчислювального пристрою, причому другий вхід перетворювача кількості імпульсів в код зв'язаний з виходом генератора заповнювальних імпульсів, а вихід вихідного буферного регістра з'єднаний з відповідним портом обчислювального пристрою.
Текст
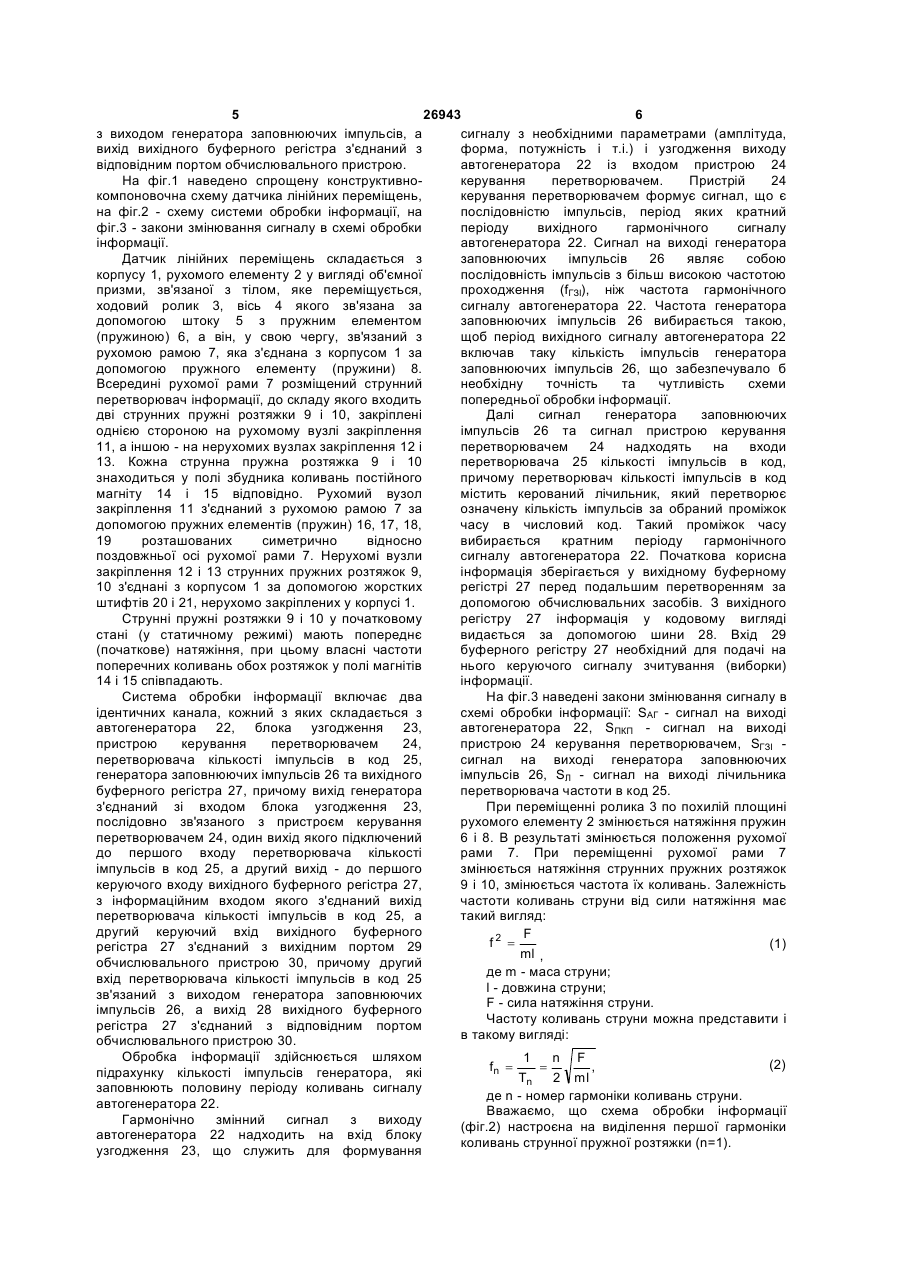
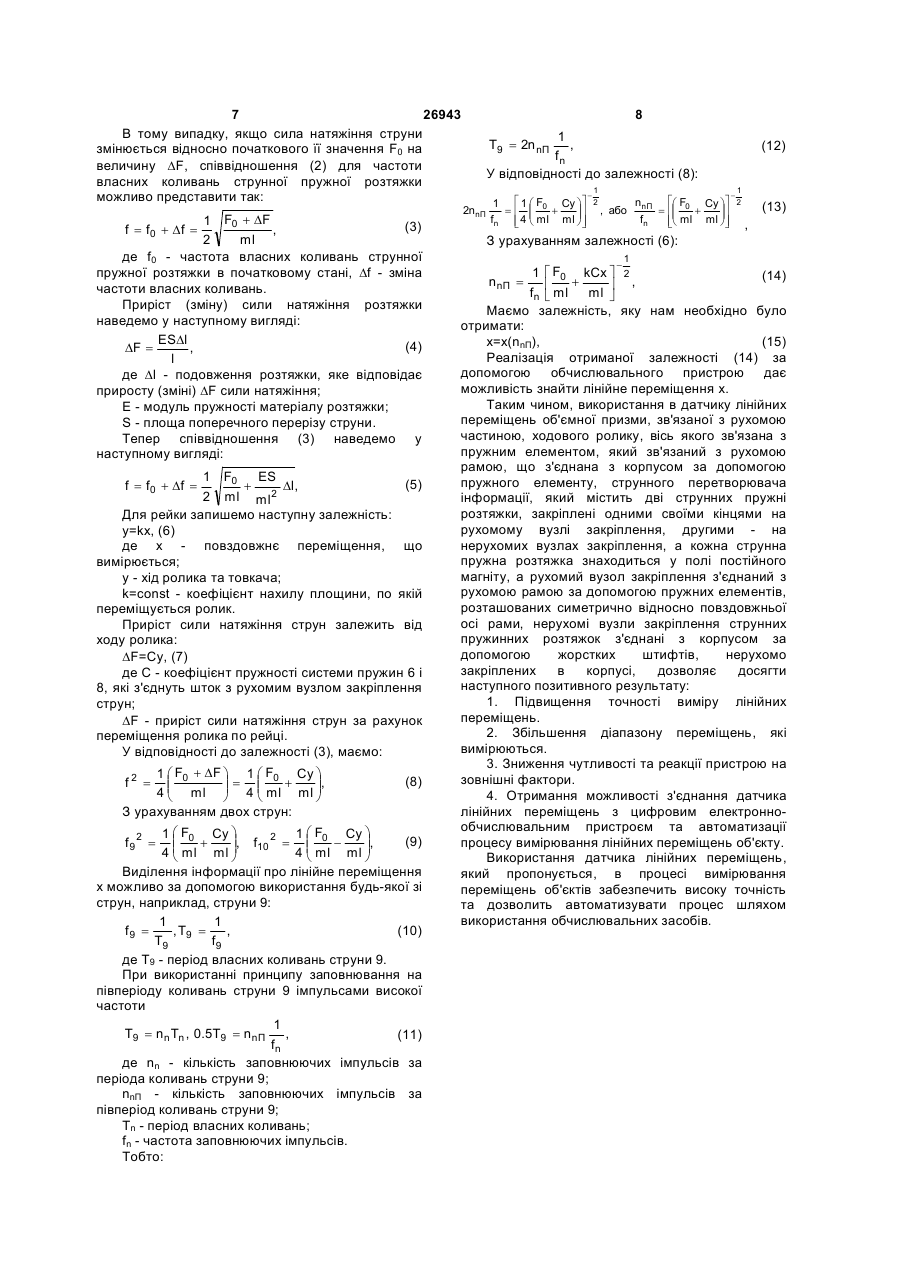
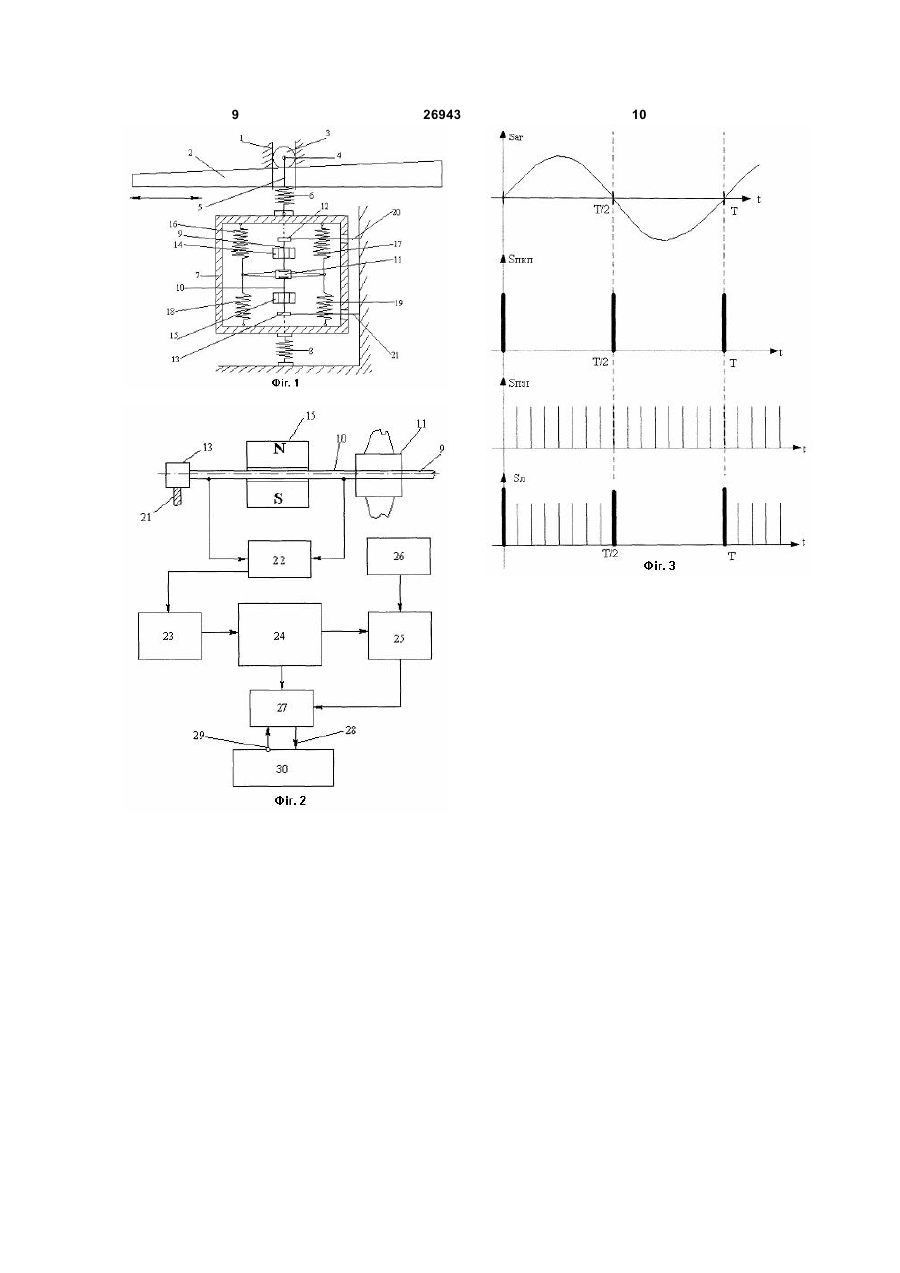
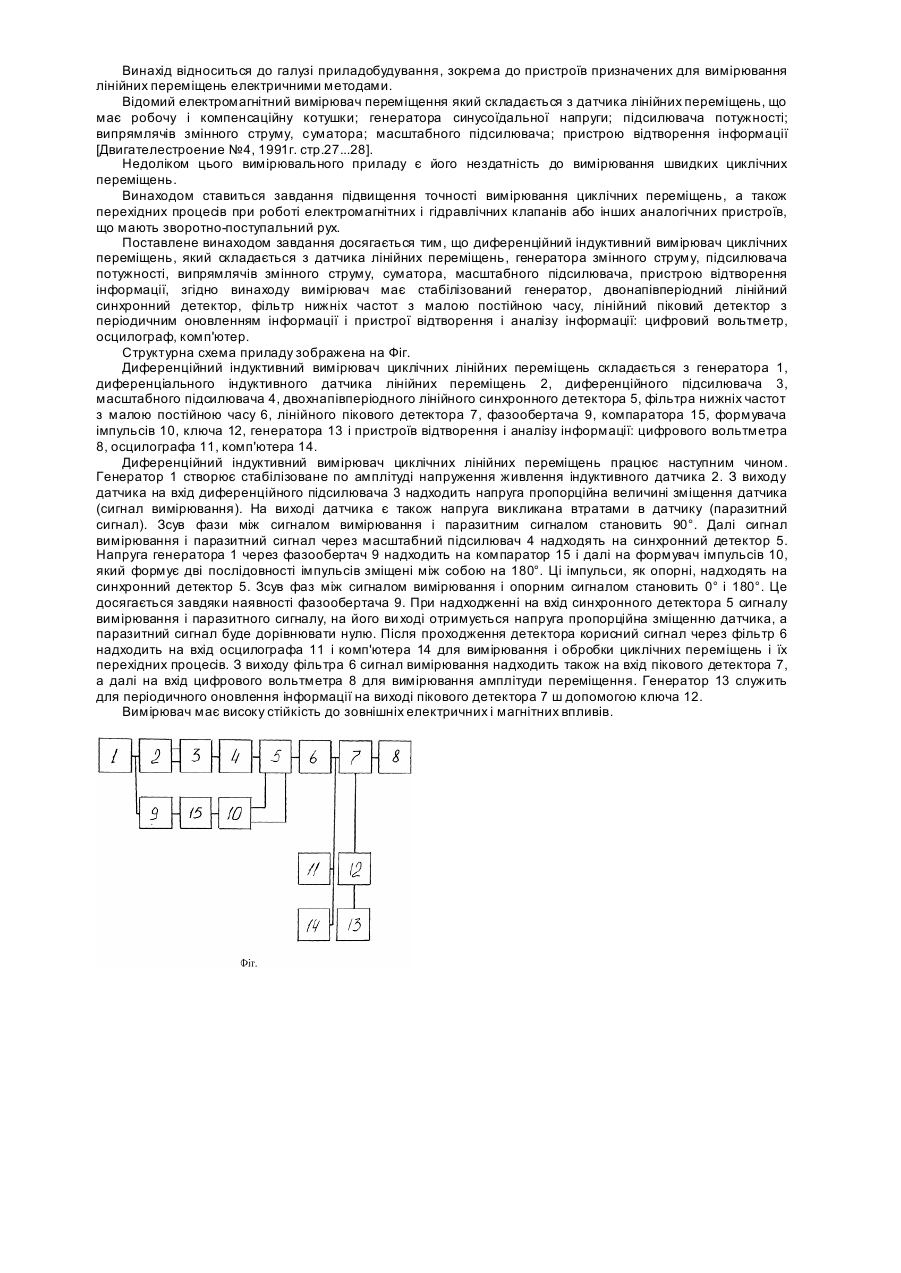
1. Датчик лінійних переміщень, що містить корпус та шток, який відрізняється тим, що до його складу введено об'ємну призму, ходовий ролик, вісь якого зв'язана з пружним елементом, який зв'язаний з рухомою рамою, що з'єднана з корпусом за допомогою пружного елементу, у рухомій рамі розташований струнний перетворювач інформації, який містить дві струнні пружні розтяжки, закріплені одними своїми кінцями на рухомому вузлі закріплення, другими - на бокових вузлах закріплення, а кожна струнна пружна розтяжка знаходиться у полі постійного магніту, а рухомий вузол закріплення з'єднаний з рухомою рамою за допомогою пружних елементів, розташованих симетрично відносно поздовжньої осі рами, нерухомі вузли закріплення струнних U 2 (19) 1 3 26943 4 перемикачі, світлові індикатори, а вимірювальний виконується через втулку та припаяну до неї елемент виконаний у вигляді електричних спіральну пружину, яка забезпечує повернення ізольованих від корпусу плиток, з'єднаних з всієї рухомої частини датчика у початковий стан. опорами за допомогою пружин, які електричне До недоліків такого пристрою відноситься: закріплені з розташованим в корпусі електронним використання потенціометра, який блоком формування електромагнітного поля та характеризується дискретністю виходу; люфти обробки інформаційного сигналу з виводами через використання великої кількості зубчастих підключення через блок світлових індикаторів та пар, що впливають на нелінійність вихідного пристроєм узгодження до системи ЧПК верстатом. сигналу; використання елементів, між якими Недоліком такого пристрою є складність виникає тертя; має аналоговий вихід, який для конструкції, що впливає на точність вимірювання, стиковки з обчислювачем необхідно а також обмежений діапазон переміщень рухомого перетворювати, тобто дуже низька точність; також об'єкта. датчик має обмежений діапазон переміщень (5Відомий датчик механічних переміщень 200мм), тому у точних пристроях використання [Деклараційний патент на Корисна модель. такого датчика не допускається. Україна. Датчик механічних переміщень. Лисенко Задача корисної моделі - підвищення точності B.C., Богатиренко Є.Ф., Погиба В.П. №5723, кл. виміру лінійних переміщень, збільшення діапазону G01B7/00, опубл. 29.12.94, Бюл.№8-1] містить переміщень, які вимірюються, зниження чутливості первинний перетворювач, виконаний у вигляді Шта реакції пристрою на зовнішні фактори, а також подібного сердечника з розміщеними на ньому можливість з'єднання датчика лінійних переміщень обмоткою збудження та двома вимірювальними з цифровим електронно-обчислювальним обмотками, тактовий генератор, з'єднаний з пристроєм. обмотками збудження первинного перетворювача, Задача, яка поставлена, вирішується завдяки рухомий елемент, встановлений з можливістю тому, що в датчик лінійних переміщень, який переміщення відносно обмоток первинного містить корпус та рухомий елемент - шток, що перетворювача, також до складу входить впливає на елемент передачі, у відповідності до первинний перетворювач, інтегратор, та корисної моделі введено призму, зв'язану з тактуючий дешифратор, входи якого з'єднані з рухомою частиною, ходовий ролик, вісь якого за виходами інтеграторів, входи інтеграторів з'єднані допомогою штоку зв'язана з пружним елементом з виходами відповідних первинних (пружиною), і який зв'язаний з рухомою рамою, що перетворювачів, кожен з яких обмоткою збудження з'єднана з корпусом за допомогою пружини, у рамі з'єднаний з виходом тактового генератора, а його розміщений струнний перетворювач інформації, вимірювальні обмотки включені зустрічноякий містить дві струнних пружні розтяжки, послідовно. закріплені одними своїми кінцями на Недоліком такого пристрою є обмежений центральному вузлі закріплення, другими - на діапазон переміщень, а також чутливість до бокових вузлах закріплення, а кожна струнна зовнішнього середовища, зокрема запиленості, пружна розтяжка знаходиться у полі збудника забруднення, що впливає на точність вимірювання коливань (постійного магніту), а рухомий вузол переміщення. закріплення з'єднаний з рухомою рамою за В якості прототипу обраний датчик лінійних допомогою пружних елементів (пружин), переміщень штокового типу [Проектирование розташованих симетрично відносно повздовжньої датчиков для измерения механических осі рами, нерухомі вузли закріплення струнних величин/Под редакцией Е.П. Осадчего. М. пружинних розтяжок з'єднані з рамою за Машиностроение, 1979]. До складу датчика допомогою жорстких штифтів, нерухомо входить корпус, який є основним несучим закріплених в корпусі та систему обробки елементом конструкції; шток - зубчата рейка, котра інформації. сприймає параметр, який вимірюється; Задача, яка поставлена, досягається також передаточний механізм, який складається з тим, що система обробки інформації включає два системи зубчастих коліс і який створює ідентичних канали, кожний з яких складається з перетворення лінійного переміщення у кут автогенератора, блока узгодження, пристрою повороту і передачу із заданим передаточним керування перетворювачем, перетворювача відношенням кута повороту на вісь реостатного кількості імпульсів в код, генератора заповнюючих перетворювача; реостатний перетворювач, який імпульсів та вихідного буферного регістра, перетворює обертальні рухи системи в причому вихід генератора, який включає до свого пропорційний йому вихідний електричний сигнал. складу струнну пружну розтяжку як чутливий При переміщенні штока від впливу об'єкту елемент, з'єднаний зі входом блока узгодження, вимірювання за допомогою зубчастої рейки, послідовно зв'язаного з пристроєм керування, нарізаної на штоці, та шестерні відбувається один вихід якого підключений до першого входу перетворення лінійного переміщення штока у перетворювача кількості імпульсів в код, а другий обертальний рух системи зубчастих коліс. Потім вихід - до першого керуючого входу вихідного сигнал передається на вісь реостатного буферного регістра, з інформаційним входом якого перетворювача, з'єднану з передаточною з'єднаний вихід перетворювача кількості імпульсів системою кулачковою муфтою. На осі в код, а другий керуючий вхід вихідного буферного перетворювача розташована токоз'ємна пружина, регістра з'єднаний з вихідним портом щітка якої їздить по резистивному елементу. обчислювального пристрою, причому другий вхід Електричний вихід з токоз'ємної пружини перетворювача кількості імпульсів в код зв'язаний 5 26943 6 з виходом генератора заповнюючих імпульсів, а сигналу з необхідними параметрами (амплітуда, вихід вихідного буферного регістра з'єднаний з форма, потужність і т.і.) і узгодження виходу відповідним портом обчислювального пристрою. автогенератора 22 із входом пристрою 24 На фіг.1 наведено спрощену конструктивнокерування перетворювачем. Пристрій 24 компоновочна схему датчика лінійних переміщень, керування перетворювачем формує сигнал, що є на фіг.2 - схему системи обробки інформації, на послідовністю імпульсів, період яких кратний фіг.3 - закони змінювання сигналу в схемі обробки періоду вихідного гармонічного сигналу інформації. автогенератора 22. Сигнал на виході генератора Датчик лінійних переміщень складається з заповнюючих імпульсів 26 являє собою корпусу 1, рухомого елементу 2 у вигляді об'ємної послідовність імпульсів з більш високою частотою призми, зв'язаної з тілом, яке переміщується, проходження (fГЗІ), ніж частота гармонічного ходовий ролик 3, вісь 4 якого зв'язана за сигналу автогенератора 22. Частота генератора допомогою штоку 5 з пружним елементом заповнюючих імпульсів 26 вибирається такою, (пружиною) 6, а він, у свою чергу, зв'язаний з щоб період вихідного сигналу автогенератора 22 рухомою рамою 7, яка з'єднана з корпусом 1 за включав таку кількість імпульсів генератора допомогою пружного елементу (пружини) 8. заповнюючих імпульсів 26, що забезпечувало б Всередині рухомої рами 7 розміщений струнний необхідну точність та чутливість схеми перетворювач інформації, до складу якого входить попередньої обробки інформації. дві струнних пружні розтяжки 9 і 10, закріплені Далі сигнал генератора заповнюючих однією стороною на рухомому вузлі закріплення імпульсів 26 та сигнал пристрою керування 11, а іншою - на нерухомих вузлах закріплення 12 і перетворювачем 24 надходять на входи 13. Кожна струнна пружна розтяжка 9 і 10 перетворювача 25 кількості імпульсів в код, знаходиться у полі збудника коливань постійного причому перетворювач кількості імпульсів в код магніту 14 і 15 відповідно. Рухомий вузол містить керований лічильник, який перетворює закріплення 11 з'єднаний з рухомою рамою 7 за означену кількість імпульсів за обраний проміжок допомогою пружних елементів (пружин) 16, 17, 18, часу в числовий код. Такий проміжок часу 19 розташованих симетрично відносно вибирається кратним періоду гармонічного поздовжньої осі рухомої рами 7. Нерухомі вузли сигналу автогенератора 22. Початкова корисна закріплення 12 і 13 струнних пружних розтяжок 9, інформація зберігається у вихідному буферному 10 з'єднані з корпусом 1 за допомогою жорстких регістрі 27 перед подальшим перетворенням за штифтів 20 і 21, нерухомо закріплених у корпусі 1. допомогою обчислювальних засобів. З вихідного Струнні пружні розтяжки 9 і 10 у початковому регістру 27 інформація у кодовому вигляді стані (у статичному режимі) мають попереднє видається за допомогою шини 28. Вхід 29 (початкове) натяжіння, при цьому власні частоти буферного регістру 27 необхідний для подачі на поперечних коливань обох розтяжок у полі магнітів нього керуючого сигналу зчитування (виборки) 14 і 15 співпадають. інформації. Система обробки інформації включає два На фіг.3 наведені закони змінювання сигналу в ідентичних канала, кожний з яких складається з схемі обробки інформації: SАГ - сигнал на виході автогенератора 22, блока узгодження 23, автогенератора 22, SПКП - сигнал на виході пристрою керування перетворювачем 24, пристрою 24 керування перетворювачем, SГЗІ перетворювача кількості імпульсів в код 25, сигнал на виході генератора заповнюючих генератора заповнюючих імпульсів 26 та вихідного імпульсів 26, SЛ - сигнал на виході лічильника буферного регістра 27, причому вихід генератора перетворювача частоти в код 25. з'єднаний зі входом блока узгодження 23, При переміщенні ролика 3 по похилій площині послідовно зв'язаного з пристроєм керування рухомого елементу 2 змінюється натяжіння пружин перетворювачем 24, один вихід якого підключений 6 і 8. В результаті змінюється положення рухомої до першого входу перетворювача кількості рами 7. При переміщенні рухомої рами 7 імпульсів в код 25, а другий вихід - до першого змінюється натяжіння струнних пружних розтяжок керуючого входу вихідного буферного регістра 27, 9 і 10, змінюється частота їх коливань. Залежність з інформаційним входом якого з'єднаний вихід частоти коливань струни від сили натяжіння має перетворювача кількості імпульсів в код 25, а такий вигляд: другий керуючий вхід вихідного буферного F f2 = (1) регістра 27 з'єднаний з вихідним портом 29 ml , обчислювального пристрою 30, причому другий де m - маса струни; вхід перетворювача кількості імпульсів в код 25 l - довжина струни; зв'язаний з виходом генератора заповнюючих F - сила натяжіння струни. імпульсів 26, а вихід 28 вихідного буферного Частоту коливань струни можна представити і регістра 27 з'єднаний з відповідним портом в такому вигляді: обчислювального пристрою 30. Обробка інформації здійснюється шляхом підрахунку кількості імпульсів генератора, які заповнюють половину періоду коливань сигналу автогенератора 22. Гармонічно змінний сигнал з виходу автогенератора 22 надходить на вхід блоку узгодження 23, що служить для формування 1 n F (2) = , Tn 2 ml де n - номер гармоніки коливань струни. Вважаємо, що схема обробки інформації (фіг.2) настроєна на виділення першої гармоніки коливань струнної пружної розтяжки (n=1). fn = 7 26943 В тому випадку, якщо сила натяжіння струни змінюється відносно початкового її значення F0 на величину DF, співвідношення (2) для частоти власних коливань струнної пружної розтяжки можливо представити так: 1 F0 + DF (3) , 2 ml де f0 - частота власних коливань струнної пружної розтяжки в початковому стані, Df - зміна частоти власних коливань. Приріст (зміну) сили натяжіння розтяжки наведемо у наступному вигляді: ESDl (4) DF = , l де Dl - подовження розтяжки, яке відповідає приросту (зміні) DF сили натяжіння; Е - модуль пружності матеріалу розтяжки; S - площа поперечного перерізу струни. Тепер співвідношення (3) наведемо у наступному вигляді: f = f0 + Df = 1 F0 ES (5) + Dl , 2 ml ml 2 Для рейки запишемо наступну залежність: y=kx, (6) де х - повздовжнє переміщення, що вимірюється; у - хід ролика та товкача; k=const - коефіцієнт нахилу площини, по якій переміщується ролик. Приріст сили натяжіння струн залежить від ходу ролика: DF=Cy, (7) де С - коефіцієнт пружності системи пружин 6 і 8, які з'єднуть шток з рухомим вузлом закріплення струн; DF - приріст сили натяжіння струн за рахунок переміщення ролика по рейці. У відповідності до залежності (3), маємо: f = f 0 + Df = 1 æ F0 + DF ö 1 æ F0 Cy ö ÷, ç ÷= ç + 4 ç ml ÷ 4 ç ml ml ÷ è ø è ø З урахуванням двох струн: f2 = (8) Cy ö 1 æ F0 Cy ö 1æF (9) ç ÷, ç ÷, f10 2 = ç 0 + 4 ç ml ml ÷ 4 è ml ml ÷ ø è ø Виділення інформації про лінійне переміщення х можливо за допомогою використання будь-якої зі струн, наприклад, струни 9: 1 1 f9 = , T9 = , (10) T9 f9 де Т9 - період власних коливань струни 9. При використанні принципу заповнювання на півперіоду коливань струни 9 імпульсами високої частоти 1 T9 = nn Tn , 0.5T9 = nnП , (11) fn де nn - кількість заповнюючих імпульсів за періода коливань струни 9; nnП - кількість заповнюючих імпульсів за півперіод коливань струни 9; Tn - період власних коливань; fn - частота заповнюючих імпульсів. Тобто: 2 f9 = 8 1 , fn У відповідності до залежності (8): T9 = 2n nП 2nnП 1 é 1 æ F0 Cy ö ù ÷ú =ê ç + fn ê 4 ç ml ml ÷ ú øû ë è 1 2 éæ F n Cy öù ÷ú , або nП = êç 0 + ç ÷ fn êè ml ml øú û ë (12) 1 2 (13) , З урахуванням залежності (6): 1 1 é F0 kCx ù 2 (14) + n nП = ê ú , fn ë ml ml û Маємо залежність, яку нам необхідно було отримати: х= х(nnП), (15) Реалізація отриманої залежності (14) за допомогою обчислювального пристрою дає можливість знайти лінійне переміщення х. Таким чином, використання в датчику лінійних переміщень об'ємної призми, зв'язаної з рухомою частиною, ходового ролику, вісь якого зв'язана з пружним елементом, який зв'язаний з рухомою рамою, що з'єднана з корпусом за допомогою пружного елементу, струнного перетворювача інформації, який містить дві струнних пружні розтяжки, закріплені одними своїми кінцями на рухомому вузлі закріплення, другими - на нерухомих вузлах закріплення, а кожна струнна пружна розтяжка знаходиться у полі постійного магніту, а рухомий вузол закріплення з'єднаний з рухомою рамою за допомогою пружних елементів, розташованих симетрично відносно повздовжньої осі рами, нерухомі вузли закріплення струнних пружинних розтяжок з'єднані з корпусом за допомогою жорстких штифтів, нерухомо закріплених в корпусі, дозволяє досягти наступного позитивного результату: 1. Підвищення точності виміру лінійних переміщень. 2. Збільшення діапазону переміщень, які вимірюються. 3. Зниження чутливості та реакції пристрою на зовнішні фактори. 4. Отримання можливості з'єднання датчика лінійних переміщень з цифровим електроннообчислювальним пристроєм та автоматизації процесу вимірювання лінійних переміщень об'єкту. Використання датчика лінійних переміщень, який пропонується, в процесі вимірювання переміщень об'єктів забезпечить високу точність та дозволить автоматизувати процес шляхом використання обчислювальних засобів. 9 26943 10
ДивитисяДодаткова інформація
Назва патенту англійськоюLinear displacement transducer
Автори англійськоюHordin Oleksandr Hryhorovych, Skichko Yuliia Ivanivna
Назва патенту російськоюДатчик линейного перемещения
Автори російськоюГордин Александр Григорьевич, Скичко Юлия Ивановна
МПК / Мітки
МПК: G01B 21/00
Мітки: лінійних, датчик, переміщень
Код посилання
<a href="https://ua.patents.su/5-26943-datchik-linijjnikh-peremishhen.html" target="_blank" rel="follow" title="База патентів України">Датчик лінійних переміщень</a>
Індуктивний датчик лінійних переміщень

Номер патенту: 3418
Опубліковано: 27.12.1994
Автор: Нікітін Борис Михайлович
МПК: G01B 5/14
Мітки: переміщень, індуктивний, лінійних, датчик
Формула / Реферат:
Индуктивный датчик линейных перемeщений, содержащий корпус, смонтированные в нем соосные катушки индуктивностей, коаксиально установленный в них якорь, установленный в корпусе с помощью шарнира измерительный рычаг, один конец которого скреплен с якорем, закрепленный на другом конце измерительного рычага щуп и средство крепления на объекте контроля, отличающийся тем, что, с целью упрощения конструкции и повышения удобств при эксплуатации,...
Диференціальний індуктивний вимірювач циклічних лінійних переміщень
Номер патенту: 79143
Опубліковано: 25.05.2007
Автори: Герасимчук Юрій Анатолійович, Топчій Сергій Іванович, Філіппов Анатолій Захарович, Мягков Валерій Іванович
Мітки: лінійних, диференціальний, індуктивний, циклічних, вимірювач, переміщень
Формула / Реферат:
Диференціальний індуктивний вимірювач циклічних лінійних переміщень, який відрізняється тим, що містить послідовно з’єднані стабілізований генератор, диференціальний індуктивний датчик лінійних переміщень, диференціальний підсилювач, масштабний підсилювач, двонапівперіодний лінійний синхронний детектор, фільтр нижніх частот з малою постійною часу, лінійний піковий детектор і цифровий вольтметр, при цьому до генератора підключені послідовно...
Пристрій для вимірювання амплітуди малих лінійних переміщень
Номер патенту: 68904
Опубліковано: 16.08.2004
Автори: Білинська Марина Йосипівна, Білинський Йосип Йосипович, Кухарчук Василь Васильович
МПК: G01B 21/00, G01B 9/00, G01H 9/00, G01B 11/08
Мітки: пристрій, малих, переміщень, вимірювання, лінійних, амплітуди
Формула / Реферат:
Пристрій для вимірювання амплітуди малих лінійних переміщень, що містить формувач світлового потоку, фотоприймач, процесор, запам'ятовуючий пристрій, який відрізняється тим, що в нього введений об'єктив, вхід якого зв'язаний з виходом формувача світлового потоку, а вихід з фотоприймачем, чотири перетворювачі струм-напруга, входи яких зв'язані з чотирма виходами фотоприймача, чотири суматори, в яких перші входи першого та другого суматорів...
Пристрій для вимірювання лінійних переміщень

Номер патенту: 16116
Опубліковано: 17.07.2006
Автори: Чеканов Микола Анатолійович, Постнов Генадій Михайлович, Червоний Віталій Миколайович, Дуб Володимир Васильович
МПК: G01B 9/00
Мітки: переміщень, лінійних, пристрій, вимірювання
Формула / Реферат:
Пристрій для вимірювання лінійних переміщень, що містить станину, прямокутну форму у вигляді паралелограма, дві рифлені плексигласові пластини, між якими закладається дослідний зразок, верхня пластина з одного боку навантажується за допомогою "вантажу", який відрізняється тим, що з іншого боку верхньої пластини приєднаний за допомогою гнучкої в'язки датчик лінійних переміщень, який з'єднано з аналого-цифровим перетворювачем.
Багатоканальний пристрій для вимірювання і реєстрації лінійних переміщень
Номер патенту: 20414
Опубліковано: 15.01.2007
Автори: Распопін Валерій Романович, Назаренко Віталій Федорович
МПК: G01B 11/14
Мітки: лінійних, багатоканальний, вимірювання, реєстрації, переміщень, пристрій
Формула / Реферат:
Багатоканальний пристрій для вимірювання і реєстрації лінійних переміщень, що складається з первинного перетворювача сигналу - тензометричного, або електричного, або електромагнітного, і аналогового вторинного перетворювача сигналу, який відрізняється тим, що як первинний перетворювач сигналу використовують оптоелектронний датчик імпульсів, який доповнений пристроєм для перетворення лінійних переміщень на випробовуваному об'єкті в кутові...
Попередній патент: Спосіб визначення антимікробної активності грунту
Наступний патент: Стенд для випробування датчиків швидкості руху мобільно – енергетичних засобів на поворотах
Випадковий патент: Розбірна куксова вкладка