Датчик кутових переміщень
Номер патенту: 28737
Опубліковано: 25.12.2007
Автори: Гордін Олександр Григорович, Тимченко Марина Юріївна

Формула / Реферат
1 Датчик кутових переміщень, що містить корпус та рухомий елемент, який відрізняється тим, що в його склад введено кругову призму, зв'язану з рухомим елементом, ходовий ролик, вісь якого за допомогою штока зв'язана з першим пружним елементом і який зв'язаний з рухомою рамою, що з'єднана з корпусом за допомогою другого пружного елемента, розміщений у рухомій рамі струнний перетворювач інформації, який містить дві струнні пружні розтяжки, закріплені одними своїми кінцями на центральному вузлі закріплення, другими - на нерухомих вузлах закріплення, та систему обробки інформації, причому кожна струнна пружна розтяжка знаходиться у полі збудника коливань, а рухомий центральний вузол закріплення з'єднаний з рухомою рамою за допомогою пружних елементів, розташованих симетрично відносно повздовжньої осі рухомої рами, нерухомі вузли закріплення струнних пружинних розтяжок з'єднані з корпусом за допомогою жорстких штифтів, нерухомо в ньому закріплених.
2. Датчик кутових переміщень за п. 1, який відрізняється тим, що система обробки інформації включає два ідентичних канали, кожний з яких складається з автогенератора струнного перетворювача інформації, блока узгодження, пристрою керування перетворювачем, перетворювача кількості імпульсів в код, генератора заповнюючих імпульсів та вихідного буферного регістра, причому вихід автогенератора струнного перетворювача інформації з'єднаний зі входом блока узгодження, послідовно зв'язаного з пристроєм керування, один вихід якого підключений до першого входу перетворювача кількості імпульсів в код, а другий вихід - до першого керуючого входу вихідного буферного регістра, з інформаційним входом якого з'єднаний вихід перетворювача кількості імпульсів в код, а другий керуючий вхід вихідного буферного регістра з’єднаний з вихідним портом обчислювального пристрою, причому другий вхід перетворювача кількості імпульсів в код зв'язаний з виходом генератора заповнюючих імпульсів, а вихід вихідного буферного регістра з'єднаний з відповідним портом обчислювального пристрою.
Текст
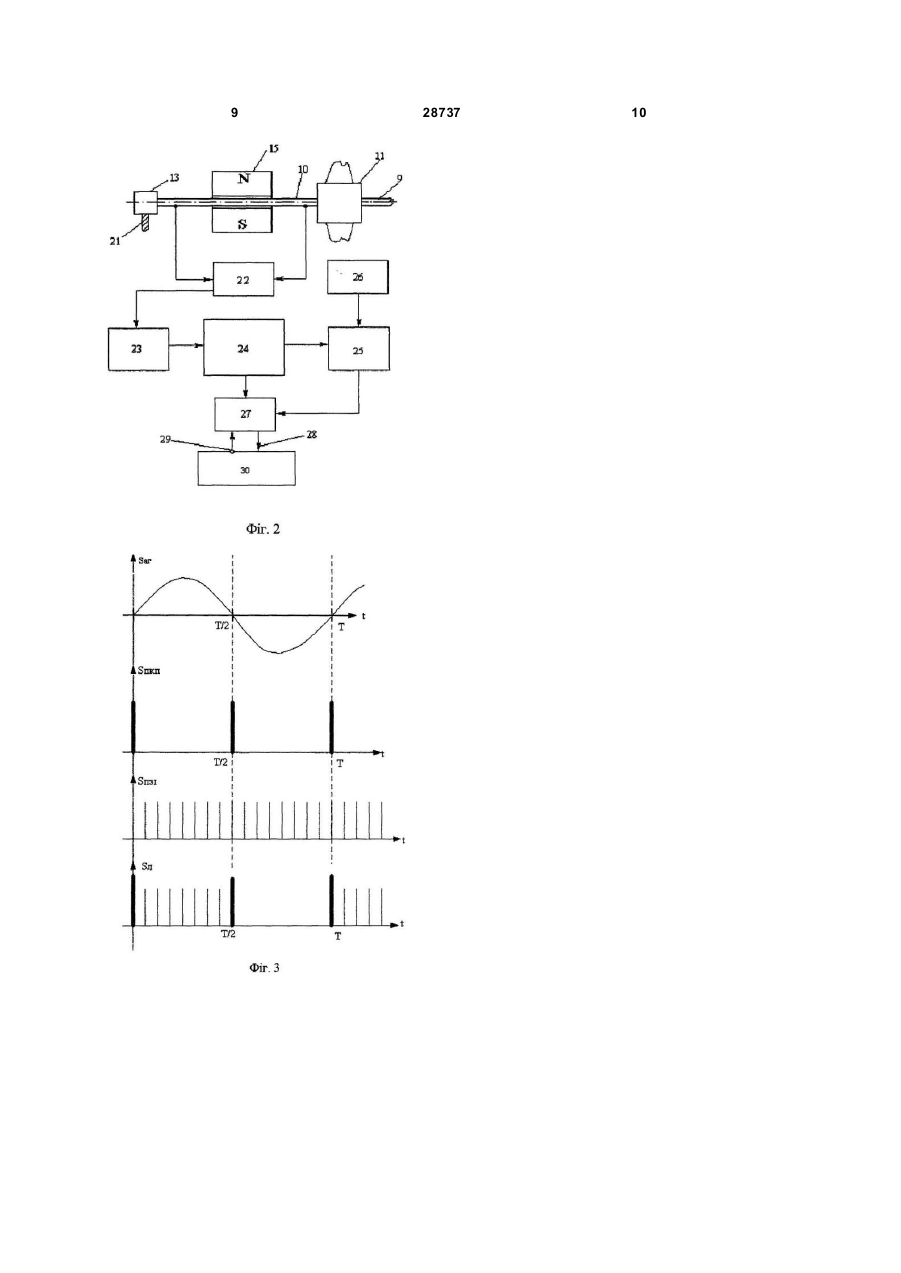
1 Датчик кутових переміщень, що містить корпус та р ухомий елемент, який відрізняється тим, що в його склад введено кругову призму, зв'язану з рухомим елементом, ходовий ролик, вісь якого за допомогою штока зв'язана з першим пружним елементом і який зв'язаний з рухомою рамою, що з'єднана з корпусом за допомогою другого пружного елемента, розміщений у рухомій рамі струнний перетворювач інформації, який містить дві струнні пружні розтяжки, закріплені одними своїми кінцями на центральному вузлі закріплення, другими - на нерухомих вузлах закріплення, та систему обробки інформації, причому кожна струнна пружна розтяжка знаходиться у полі збудника коливань, а рухомий центральний вузол закріплення з'єднаний з рухомою рамою за допомогою пружних елементів, розташованих симетрично відносно повздовжньої осі рухомої рами, нерухомі вузли закріплення U 2 (19) 1 3 28737 поміщеного між пластинами, перетворюється в зміну ємності, а значить вихідного сигналу. До недоліків ємнісних перетворювачів можна віднести: порівняно низький рівень потужності вихідного сигналу, нестабільність характеристик при зміні параметрів навколишнього середовища, вплив паразитних ємностей, складність перетворювання вихідного сигналу. В якості найближчого аналога обраний потенціометричний датчик [Н. И. Подлесный, В. Г. Рубанов Элементы систем автоматического управления и контроля. - Киев: Ви ща школа, 1982], до складу якого входить корпус, рухомий елемент, тонкий ізольований провід з високим омічним опором, намотаним в один ряд на ізольований каркас. У ламельних потенціометрах використовуються постійні опори, які з'єднані з ламелями. При русі струмознімача по контактних ламелям опір змінюється. У таких потенціометрах зміна опору може відбуватися в широких границях. У потенціометрах; безперервного намотування перемінним опором служить намотаний на каркас в один ряд тонкий провід, по зачищеній поверхні якого ковзає струмознімач. Опір таких потенціометрів лежить у межах від декількох десятків Ом до десятків кОм. До недоліків потенціометричних датчиків можна віднести: наявність ковзного контакту, що може стати причиною відмов, внаслідок окислювання контактної доріжки, чи перетирання витків відгинання повзунка, погрішність у роботі за рахунок навантаження, порівняно невеликий коефіцієнт перетворення і високий поріг чутливості, наявність шумів, схильність до виникнення електроерозії під дією електророзрядів, обмеженість швидкості лінійного переміщення обертання струмознімача внаслідок його вібрацій при переході з витка на виток і підвищення при цьому рівня динамічного шуму, обмежена можливість використання на перемінному струмі підвищеної частоти, обумовлена зростанням індуктивності і ємності намотування, низька зносостійкість. Задача корисної моделі - підвищення точності виміру кутових переміщень, збільшення діапазону переміщень, які вимірюються, зниження чутливості та реакції пристрою на зовнішні фактори, а також можливість з'єднання датчика кутових переміщень з електронно-обчислювальним пристроєм, вимірювання кутів повороту крупногабаритних елементів. Задача, яка поставлена, вирішується завдяки тому, що датчик кутови х переміщень, який містить корпус та рухомий елемент, у відповідності до корисної моделі, введено кругову призму, зв'язану з рухомим елементом, ходовий ролик, вісь якого за допомогою штоку зв'язана з першим пружним елементом, і який зв'язаний з рухомою рамою, що з'єднана з корпусом за допомогою другого пружного елемента, розміщений у рухомій рамі струнний перетворювач інформації, який містить дві стр унні пружні розтяжки, закріплені одними своїми кінцями на рухомому центральному вузлі 4 закріплення, другими - на нерухомих вузлах закріплення, та систему обробки інформації, кожна струнна пружна розтяжка знаходиться у полі збудника коливань, а рухомий центральний вузол закріплення з'єднаний з рухомою рамою за допомогою пружних елементів, розташованих симетрично відносно повздовжньої осі рами, нерухомі вузли закріплення струнних пружинних розтяжок з'єднані з корпусом за допомогою жорстких шти фтів, нерухомо в ньому закріплених. Також задача вирішується тим, що система обробки інформації включає два ідентичних канали, кожний з яких складається з автогенератора струнного перетворювача інформації, блока узгодження, пристрою керування перетворювачем, перетворювача кількості імпульсів в код, генератора заповнюючих імпульсів та ви хідного буферного регістра, причому вихід автогенератора струнного перетворювача інформації з'єднаний зі входом блока узгодження, послідовно зв'язаного з пристроєм керування, один вихід якого підключений до першого входу перетворювача кількості імпульсів в код, а другий вихід - до першого керуючого входу ви хідного буферного регістра, з інформаційним входом якого з'єднаний вихід перетворювача кількості імпульсів в код, а другий керуючий вхід ви хідного буферного регістра з'єднаний з вихідним портом обчислювального пристрою, причому другий вхід перетворювача кількості імпульсів в код зв'язаний з виходом генератора заповнюючих імпульсів, а вихід ви хідного буферного регістра з'єднаний з відповідним портом обчислювального пристрою. На Фіг.1 наведена спрощена конструктивнокомпоновочна схема датчика кутови х переміщень, на Фіг.2 - схема системи обробки інформації, на Фіг.3 -закони змінювання сигналів в схемі обробки інформації. Датчик кутови х переміщень складається з корпусу 1, рухомого елементу, який жорстко зв'язаний з круговою призмою 2, ходовий ролик 3, вісь 4 якого за допомогою штоку 5 зв'язана з першим пружним елементом 6, а він у свою чергу, зв'язаний з рухомою рамою 7, яка з'єднана з корпусом 1 за допомогою другого пружного елементу 8. Всередині рухомої рами 7 розміщений струнний перетворювач інформації, до складу якого входить дві стр унні пружні розтяжки 9 і 10, закріплені одними своїми кінцями на рухомому центральному вузлі закріплення 11, другими кінцями - на нерухомих вузлах закріплення 12 і 13. Кожна струнна пружна розтяжка 9 і 10 знаходиться у полі збудника коливань (постійного магніту) 14 і 15 відповідно. Рухомий центральний вузол закріплення 11 з'єднаний з рухомою рамою 7 за допомогою пружних елементів 16, 17, 18, 19, розташованих симетрично відносно повздовжньої осі рухомої рами 7. Нерухомі вузли закріплення 12 і 13 струнних пр ужних розтяжок 9, 10 з'єднані з корпусом 1 за допомогою жорстких шти фтів 20 і 21, нерухомо в ньому закріплених. Струнні пружні розтяжки 9 і 10 у початковому стані (у статичному режимі) мають попереднє (початкове) на тяжіння, при цьому власні частоти 5 28737 поперечних коливань обох розтяжок у полі магнітів 14 і 15 співпадають. Система обробки інформації датчика кутови х переміщень включає два ідентичних канала, кожний з яких складається є автогенератора 22 струнного перетворювача інформації, блока узгодження 23, пристрою 24 керування перетворювачем, перетворювача 25 кількості імпульсів в код, генератора 26 заповнюючих імпульсів та вихідного буферного регістра 27. Вихід автогенератора 22 струнного перетворювача інформації з'єднаний зі входом блока узгодження 23, послідовно зв'язаного з пристроєм 24 керування, один вихід якого підключений до першого входу перетворювача 25 кількості імпульсів в код, а другий вихід - до першого керуючого входу ви хідного буферного регістра 27, з інформаційним входом якого з'єднаний вихід перетворювача 25 кількості імпульсів в код, а другий керуючий вхід 29 вихідного буферного регістра 27 з'єднаний з вихідним портом обчислювального пристрою 30. Другий вхід перетворювача 25 кількості імпульсів в код зв'язаний з виходом генератора 26 заповнюючих імпульсів, а вихід 28 вихідного буферного регістра 27 з'єднаний з відповідним портом обчислювального пристрою 30. Датчик кутови х переміщень працює таким чином. При переміщенні ходового ролика 3 по похилій площині кругової призми 2 змінюється натяжіння першого 6 та другого 8 пружних елементів. В результаті змінюється положення рухомої рами 7. При цьому змінюється натяжіння струнних пружних розтяжок 9 та 10. Частота поперечних коливань розтяжки визначається так: F f2 = (1) ml , де m - маса струнної пружної розтяжки; l - довжина струнної пружної розтяжки; F - сила натяжіння струнної пружної розтяжки. Частоту коливань струнної пружної розтяжки можна представити і в такому вигляді: F (2) ml , де n - номер гармоніки коливань розтяжки. Вважаємо, що схема обробки інформації (Фіг.2) настроєна на виділення першої гармоніки коливань струнної пружної розтяжки (n=1). В тому випадку, якщо сила натяжіння струни F змінюється відносно початкового її значення 0 на величину DF , співвідношення (2) для частоти власних коливань cтрунної пружної розтяжки можливо представити так: fn = 1 n = Tn 2 f = f0 + Df = 1 2 F0 + DF ml , (3) f де 0 - частота власних коливань струнної пружної розтяжки в початковому стані; D f - зміна частоти власних коливань. Приріст (зміну) сили натяжіння розтяжки наведемо у наступному вигляді: 6 ESDl (4) l , де Dl - подовження розтяжки, яке відповідає приросту (зміні) сили на тяжіння; E - модуль пружності матеріалу розтяжки; S - площа поперечного перерізу струни. DF = Тепер співвідношення наступному вигляді: (3) наведемо у F0 ES + Dl (5) ml ml2 . Хід осі 4 ходового ролика 3 при повороті рухомого елемента або кругової призми на кут j визначається так: y = kj , (6) f = f0 + Df = 1 2 де k - тангенс кута нахилу вер хньої поверхні розвертки кругової призми. Приріст сили натяжіння струн залежить від ходу ролика: DF = Cy , (7) де C - коефіцієнт пружності системи пружиних елементів 6, 8, 16, 17, 18, 19, які з’єднують шток 5 з рухомим центральним вузлом 11 закріплення струнних пр ужних розтяжок; DF - приріст сили натяжіння струнних пружних розтяжок за рахунок переміщення ролика по поверхні кругової призми. У відповідності до залежності (3), маємо: 1 æ F + D F ö 1 æ F0 Ckj ö f2 = ç 0 + ÷= ç ÷ (8) 4 è ml ø 4 è ml ml ø . З урахуванням двох струнних пружних розтяжок: 1 æ F0 kj ö 2 1 æ F0 Ckj ö 2 f9 = + ç ÷, f10 = ç ÷ (9) 4 è ml ml ø 4 è ml ml ø . Виділення інформації про кутове переміщення j кутової призми можливо за допомогою використання будь-якої зі струнних пружних розтяжок, наприклад, струни 9: 1 1 f9 = , T9 = (10) T9 f9 , T де 9 - період власних коливань струнної пружної розтяжки 9. При використанні принципу заповнювання за півперіода коливань струнної пружної розтяжки 9 імпульсами високої частоти маємо: 1 T9 = nn Tn , 0.5T9 = nnn , (11) fn n де n - кількість заповнюючих імпульсів за період коливань струнної пружної розтяжки 9; nnn - кількість заповнюючих імпульсів за півперіод коливань розтяжки 9; Tn - період власних коливань струнної пружної розтяжки; fn - частота заповнюючих імпульсів. Тобто: 7 28737 1 . fn У відповідності до залежності (8): T9 = 2nnn 2nnn 1 é 1 æ F0 Ck j öù =ê ç + ÷ú fn ë 4 ç ml ml ÷û è ø 1 2 (12) , або nnn = éF0 + Ckj ù ê ú f ml ml n ë û 1 2 . (13) З урахуванням залежності (6): nnn 1 = fn é F0 Ckj ù ê ml + ml ú ë û 1 2 . (14) Обробка інформації здійснюється шляхом підрахунку кількості імпульсів генератора, які заповнюють половину періоду коливань сигналу автогенератора 22. Гармонічно змінний сигнал з виходу автогенератора 22 надходить на вхід блоку узгодження 23, що служить для формування сигналу з необхідними параметрами (амплітуда, форма, потужність і т.і.) і узгодження виходу автогенератора 22 зі входом пристрою 24 керування перетворювачем. Пристрій 24 керування перетворювачем формує сигнал, що є послідовністю імпульсів, період яких кратний періоду ви хідного гармонічного сигналу автогенератора 22. Сигнал на виході генератора заповнюючих імпульсів 26 являє собою послідовність імпульсів з більш високою частотою проходження, ніж частота гармонічного сигналу автогенератора 22. Частота генератора заповнюючих імпульсів 26 вибирається такою, щоб період вихідного сигналу автогенератора 22 включав таку кількість імпульсів генератора заповнюючих імпульсів 26, що забезпечувало б необхідну точність та чутливість схеми попередньої обробки інформації. Далі сигнал генератора заповнюючих імпульсів 26 та сигнал пристрою керування перетворювачем 24 надходять на входи перетворювача 25 кількості імпульсів в код, причому перетворювач кількості імпульсів в код містить керований лічильник, який перетворює означену кількість імпульсів за обраний проміжок часу в числовий код. Такий проміжок часу вибирається кратним періоду гармонічного сигналу автогенератора 22. Початкова корисна інформація зберігається у вихідному буферному регістрі 27 перед подальшим перетворенням за допомогою обчислювальних засобів. З вихідного регістру 27 інформація у кодовому вигляді видається за допомогою шини 28. Вхід 29 буферного регістру 27 необхідний для подачі на нього керуючого сигналу зчитування (вибірки) інформації. На фігурі 3 наведені закони змінювання сигналів в схемі обробки інформації: SАГ - сигнал на виході автогенератора 22; SПКП - сигнал на виході пристрою 24 керування перетворювачем; SГЗІ - сигнал на виході генератора заповнюючих імпульсів 26; SЛ - сигнал на виході лічильника перетворювача частоти в код 25. Таким чином, використання в датчику кутови х переміщень кругової призми, зв'язаної з рухомою частиною, ходового ролика, вісь якого зв'язана з 8 пружним елементом, який зв'язаний з рухомою рамою, що з'єднана з корпусом за допомогою струнного перетворювача інформації, який містить дві стр унних пружні розтяжки, закріплені одними своїми кінцями на рухомому центральному вузлі закріплення, другими - на нерухомих вузлах закріплення, а кожна струнна пружна розтяжка знаходиться у полі збудника коливань (постійного магніту), а рухомий центральний вузол закріплення з'єднаний з рухомою рамою за допомогою пружних елементів, розташованих симетрично відносно повздовжньої осі рами, нерухомі вузли закріплення струнних пружних розтяжок з'єднані з корпусом за допомогою жорстких штифтів, нерухомо закріплених в корпусі, дозволяє досягти наступного позитивного результату: 1. Підвищення точності виміру кутови х переміщень. 2. Збільшення діапазону переміщень, які вимірюються. 3. Зниження чутливості та реакції пристрою на зовнішні фактори. 4. Можливість з'єднання датчика кутови х переміщень з електронно-обчислювальним пристроєм. Використання датчика кутових переміщень, який пропонується, в процесі вимірювання кутових переміщень об'єктів забезпечить високу точність та дозволить автоматизувати процес шляхом використання обчислювальних засобів. 9 28737 10
ДивитисяДодаткова інформація
Назва патенту англійськоюAngular position transducer
Автори англійськоюHordin Oleksandr Hryhorovych, Tymchenko Maryna Yuriivna
Назва патенту російськоюДатчик углового положения
Автори російськоюГордин Александр Григорьевич, Тимченко Марина Юрьевна
МПК / Мітки
МПК: G01B 7/30
Мітки: кутових, датчик, переміщень
Код посилання
<a href="https://ua.patents.su/5-28737-datchik-kutovikh-peremishhen.html" target="_blank" rel="follow" title="База патентів України">Датчик кутових переміщень</a>
Датчик кутових переміщень з електронною схемою визначення кута нахилу
Номер патенту: 50687
Опубліковано: 15.10.2002
Автори: Галицький Анатолій Петрович, Павленко Юрій Федорович
МПК: G01P 15/13
Мітки: схемою, нахилу, переміщень, електронною, кута, кутових, датчик, визначення
Формула / Реферат:
Датчик кутових переміщень, що містить механічну частину, що складається з маятника, підвішеного на, щонайменше, одній балці, двох котушок індуктивності, що входять до складу датчиків відхилення маятника від середнього положення, і двигуна лінійного типу, що має котушку індуктивності, розташовану на маятнику, і два магніти з зустрічно орієнтованими полями, які розташовані з боків котушки і закріплені нерухомо, і електронну частину, що включає...
Датчик лінійних переміщень
Номер патенту: 26943
Опубліковано: 10.10.2007
Автори: Гордін Олександр Григорович, Скічко Юлія Іванівна
МПК: G01B 21/00
Мітки: переміщень, лінійних, датчик
Формула / Реферат:
1. Датчик лінійних переміщень, що містить корпус та шток, який відрізняється тим, що до його складу введено об'ємну призму, ходовий ролик, вісь якого зв'язана з пружним елементом, який зв'язаний з рухомою рамою, що з'єднана з корпусом за допомогою пружного елементу, у рухомій рамі розташований струнний перетворювач інформації, який містить дві струнні пружні розтяжки, закріплені одними своїми кінцями на рухомому вузлі закріплення, другими -...
Перетворювач кутових переміщень
Номер патенту: 48359
Опубліковано: 15.01.2004
Автори: Перепада Борис Антонович, Хащін Юрій Олександрович, Копп Вадим Якович, Перепада Максим Борисович
МПК: G01B 11/00, G01B 21/00
Мітки: переміщень, перетворювач, кутових
Формула / Реферат:
Перетворювач кутових переміщень, що містить відліковий пристрій у вигляді растрового диска, елементи зчитування та відображення інформації, який відрізняється тим, що відліковий пристрій виконаний у вигляді диска, оснащеного приводом, з можливістю безперервного обертання і нанесеним на ньому (магнітними чи оптичними) вимірювальним растром та штрихом, який вказує на початок та кінець зчитування інформації (кут повороту), причому диск оснащений...
Фотоелектричний імпульсний перетворювач кутових переміщень

Номер патенту: 1303
Опубліковано: 17.06.2002
Автори: Некрасов Ігор Петрович, Шраго Катерина Леонидівна, Мостовий Олексій Іванович, Самойлов Олександр Іванович, Юхачов Віталій Володимирович
МПК: H03M 1/22, G01B 21/00
Мітки: фотоелектричний, перетворювач, переміщень, кутових, імпульсний
Формула / Реферат:
1.Фотоелектричний імпульсний перетворювач кутових переміщень, який містить корпус із основою, вал, розташований в корпусі та встановлений на опорах, одну з яких змонтовано в основі, радіальну растрову вимірювальну ланку з вимірювального растрового диска, жорстко зв'язаного з валом, індикаторного растра, встановленого проти вимірювального растрового диска з проміжком, випромінювачів та фотоприймачів, кришку на торці корпусу, друковану плату з...
Пристрій для передачі дистанційно синхронних лінійних і кутових переміщень
Номер патенту: 3414
Опубліковано: 15.11.2004
Автор: Чигрин Олександр Петрович
МПК: F15B 9/00
Мітки: передачі, переміщень, синхронних, лінійних, кутових, пристрій, дистанційно
Формула / Реферат:
Пристрій для передачі дистанційно синхронних лінійних і кутових переміщень, що містить задавальний механізм і приймальний механізм, з'єднані гідросистемою, що включає ідентичні гідроциліндри і трубопровід, який відрізняється тим, що задавальний і приймальний механізми ідентичні і виконані у вигляді зубчатих секторів і зубчатих рейок, а гідроциліндри виконані з двосторонніми штоками, причому кінці штоків жорстко з'єднані з зубчатими рейками, а...
Попередній патент: Подрібнювач кормів
Наступний патент: Спосіб підвищення точності вимірювань несучої частоти сигналів багатоканальним вимірником
Випадковий патент: Пристрій для очищення ложемента шпинделя пристрою зчитування й/або запису інформації на компакт-диски