Спосіб регулювання збудження синхронних машин


Формула / Реферат
(21) 2000063610
(54) (57)
Дата прийняття
рішення
23.03.2001 р.
Спосіб регулювання збудження синхронних машин, при якому напругу статора регулюють шляхом зміни струму збудження, який відрізняється тим, що струм збудження регулюють відповідно від зміни радіальної складової вектора напруженості магнітного поля в просторі робочого зазору синхронної машини, а саме - при зменшенні радіальної складової вектора напруженості струм збудження збільшують, а при збільшенні радіальної складової вектора напруженості струм збудження зменшують, для стабілізації електромеханічних коливань ротора синхронної машини регулюють струм збудження відповідно від зміни тангенціальної складової вектора напруженості магнітного поля в просторі робочого зазору синхронної машини, а саме -при зменшенні тангенціальної складової вектора напруженості струм збудження зменшують, а при збільшенні тангенціальної складової вектора напруженості струм збудження збільшують, для релейного захисту синхронної машини від внутрішніх пошкоджень використовують збільшення аксіальної складової вектора напруженості магнітного поля в просторі робочого зазору більше заданої уставки, причому для вимірювання радіальної, тангенціальної та аксіальної складових вектора напруженості в просторі робочого зазору синхронної машини використовують ортогональні датчики Холла, розміщені по одному на полюсну поділку росточки статора синхронної машини, кожний з котрих являє собою три взаємно перпендикулярних датчика Холла, конструктивно об'єднані в один.
Текст
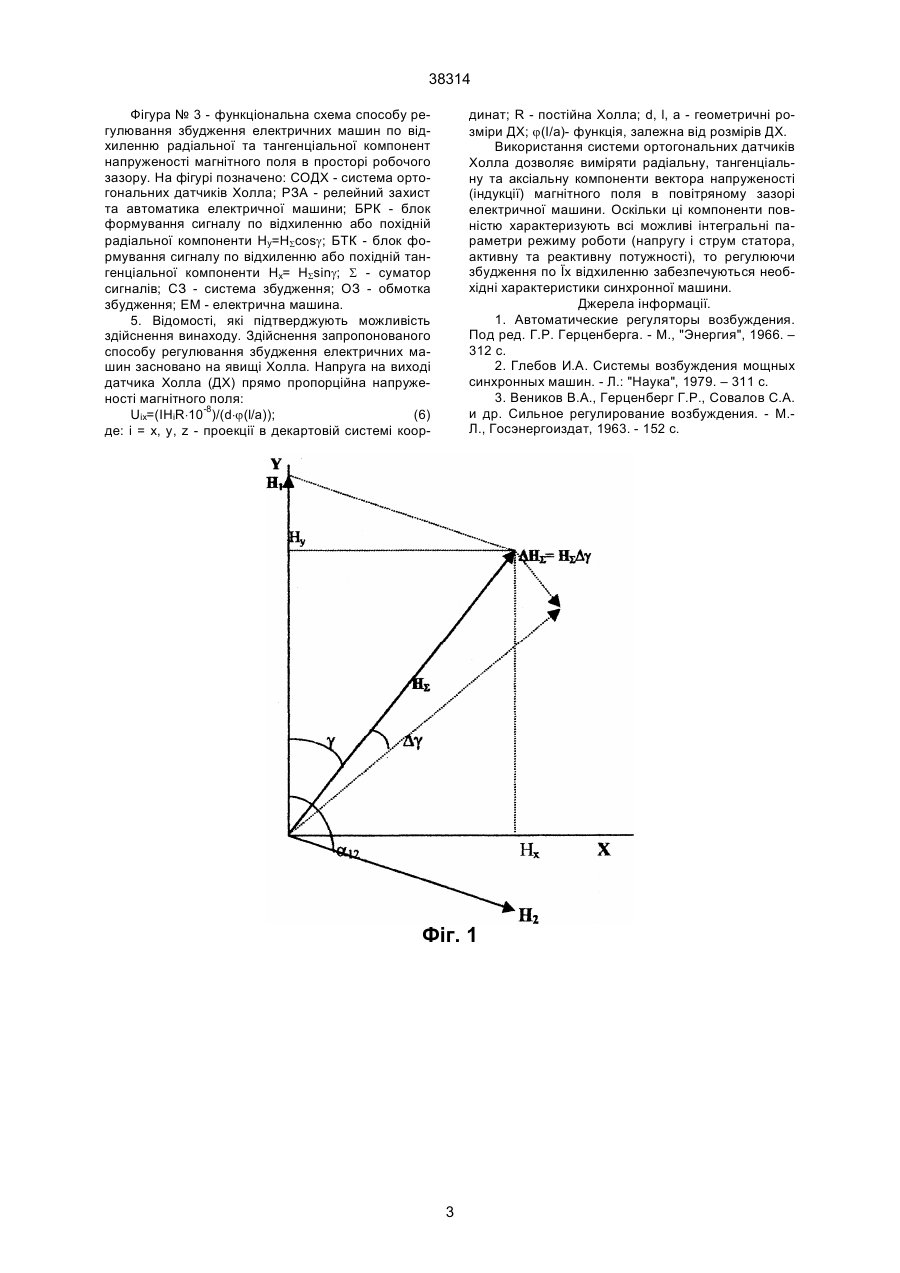
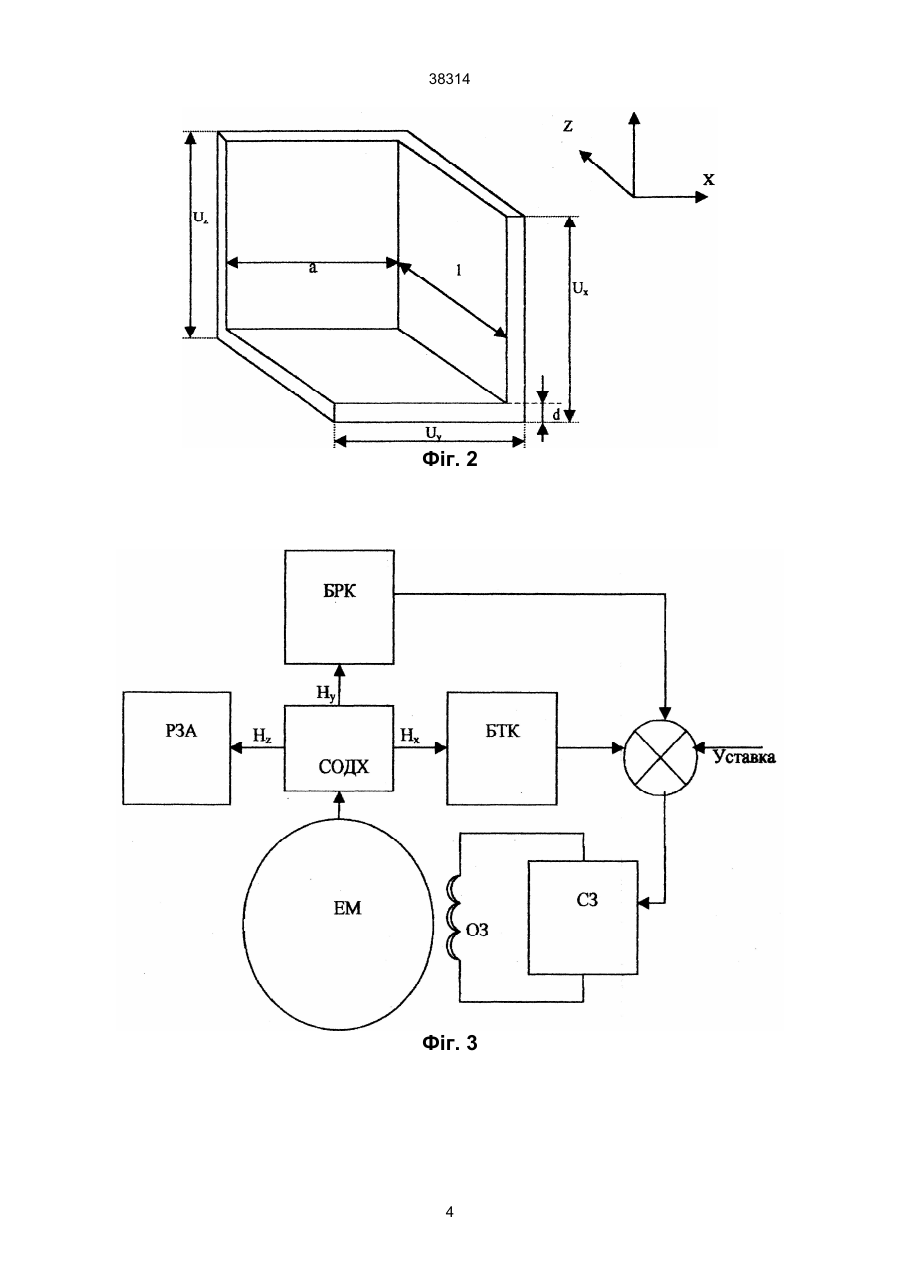
Спосіб регулювання збудження синхронних машин, при якому напругу статора регулюють шляхом зміни струму збудження, який відрізняється тим, що струм збудження регулюють відповідно від зміни радіальної складової вектора напруженості магнітного поля в просторі робочого зазору синхронної машини, а саме - при зменшенні радіальної складової вектора напруженості струм збудження збільшують, а при збільшенні радіальної складової вектора напруженості струм збудження зменшують, для стабілізації електромеханікних коливань ротора синхронної машини регулюють струм збудження відповідно від зміни танген 38314 w - кутова швидкість обертання ротора; n=wz. Оскільки споживач деформує магнітне поле в просторі робочого зазору, то створюється тангенціальна компонента магнітного поля Нх і для різних споживачів електричної енергії потужність може бути виражена як: R-споживач: Р=nH1H2sina12=nНхНу=nНхН1, так як Ну=Н1; RC-споживач: Р=nH1H2sina12=n(НхНу-Нх(Ну-Н1))=nНхН1;(5) RL-споживач: Р=nН1H2sina12=n(НхНу+Нх(Н1-Ну))=nНхН1; де Ну = HScosg- радіальна компонента вектора напруженості сумарного магнітного поля HS; Нх= HSsing- тангенціальна компонента вектора напруженості сумарного магнітного поля HS; g - кут між вектором напруженості магнітного поля обмотки збудження Н1 та вектором напруженості сумарного магнітного поля HS. Система рівнянь (5) дозволяє представити зміну активної потужності ΔР через зміну тангенціальної компоненти ΔНx вектора напруженості сумарною магнітного поля HS зміну вектора напруженості магнітного поля обмотки збудження ΔН1, а також зміну кута Δg. Взаємозв'язок між цими параметрами дозволяє виконати автоматичне регулювання збудження синхронних машин вказаним способом, функціональна схема якого показана на фіг. 3. Таким чином, в основу винаходу поставлено задачу автоматичного регулювання електричних машин шляхом введення зворотних зв'язків по зміні радіальної та тангенціальної компонент напруженості магнітного поля в просторі робочого зазору, вимірюваних за допомогою ортогональних датчиків Холла, що забезпечує необхідну якість напруги на виводах, стійку роботу як в мережі так і при роботі на автономного споживача, спрощення конструкції АРЗ за рахунок зменшення необхідних зворотних зв'язків та датчиків початкової інформації, що в сукупності збільшує надійність АРЗ та зменшує його ціну. 4. Перелік фігур, креслень. Фігура № 1 - векторна діаграма напруженостей магнітних полів обмоток збудження та якоря в просторі робочого зазору електричної машини. На фігурі позначено: Н1 - вектор напруженості магнітного поля обмотки збудження; H2 - вектор напруженості магнітного поля обмотки якоря; Ну=HScosg - радіальна компонента вектора напруженості сумарного магнітного поля HS; Нх= HSsing - тангенціальна компонента вектора напруженості сумарного магнітного поля HS; ΔHS - зміна вектора напруженості сумарного магнітного поля; g - кут між вектором напруженості магнітного поля обмотки збудження Н1 та вектором напруженості сумарного магнітного поля HS; Δg- зміна кута між вектором напруженості магнітного поля обмотки збудження Н1 та вектором напруженості сумарного магнітного поля HS; a12- електричний кут між осями взаємно нерухомих в просторі магніторушійних сил М.Д.С обмоток збудження та якоря. Фігура № 2 - ортогональний датчик Холла. На фігурі позначено: а, 1, d - геометричні розміри датчика Холла; Ux, Uy, Uz - тангенціальна, радіальна та аксіальна електрорушійні сили (Е.Р.С.) Холла від відповідних компонент вектора напруженості сумарного магнітного поля HS. тного поля в просторі робочого зазору синхронної машини; а не напруга статора. Складові векторів напруженості магнітних полів струмів обмоток збудження та якоря показано на векторній діаграмі фіг. 1. В АРЗ, виконаного за допомогою способу, для виміру вищезгаданих компонент магнітного поля використовується система ортогональних датчиків Холла. Кожний з ортогональних датчиків являє собою конструкцію з трьох взаємно-перпендикулярних датчиків Холла, що показано на фіг. 2, встановлену в просторі робочого зазору електричної машини з розрахунку один датчик на полюсну поділку росточки статора. Такий датчик дозволяє виміряти радіальну, тангенціальну та аксіальну складову вектора напруженості магнітного поля електричної машини. Значення аксіальної складової може бути використане для релейного захисту електричної машини від внутрішніх пошкоджень. Для доказу того, що вищезгадані параметри можуть бути використані для регулювання електричної машини представимо активну потужність синхронної машини як зміну енергії магнітного поля по куту між магнітними осями обмоток ротора та статора. Виразимо енергію магнітного поля W через вектор індукції В, або для простору робочого зазору електричної машини через вектор напруженість Н (так як mr=1 для повітря): ( ) W = ò B 2 / 2 m 0 m r dV = [ V ; (1) ] = ò (1 / 2)m 0 m r H 2 dV V де: V - об'єм робочого зазору електричної машини. Тоді, нехтуючи струмами в демпферних контурах і визначаючи об'єм робочого зазору через геометричні розміри маємо: W = ( ptd 0 l / 2 m 0 m r ) × ( 2 2 ) × B1 + B2 + 2 B1 B2 cosa12 = ( = z H 1 + H 2 + 2 H 1 H 2 cosa 12 2 2 ; (2) ) де: z = ptd 0 lm 0 m r / 2 коефіцієнт, який харак теризує конструкцію синхронної машини; р - кількість пар полюсів; t = (pR)/p - полюсна поділка; R радіус росточки статору; d0- робочий зазор синхронної машини; l - довжина активної частини синхронної машини; m0- магнітна постійна, 4p×10-7 Гн/м; mr- відносна магнітна проникність сере-до-вища робочого зазору; В1(Н1) - амплітуда індукції (напруженості) магнітного поля обмотки збудження; В2(Н2) - амплітуда індукції (напруженості) магнітного поля обмотки якоря; a12- електричний кут між осями взаємно нерухомих в просторі магніторушійних сил М.Д.С. обмоток збудження та якоря. Відповідно електромагнітний момент є похідною енергії по куту a12: М=p(dW/da12)=zH1H2sina12; (3) і для постійної частоти обертання ротору активна потужність: Р=wM=wzH1H2sina12=nH1H2sina12; (4) де: 2 38314 Фігура № 3 - функціональна схема способу регулювання збудження електричних машин по відхиленню радіальної та тангенціальної компонент напруженості магнітного поля в просторі робочого зазору. На фігурі позначено: СОДХ - система ортогональних датчиків Холла; РЗА - релейний захист та автоматика електричної машини; БРК - блок формування сигналу по відхиленню або похідній радіальної компоненти Ну=HScosg; БТК - блок формування сигналу по відхиленню або похідній тангенціальної компоненти Нх= HSsing; S - суматор сигналів; СЗ - система збудження; ОЗ - обмотка збудження; ЕМ - електрична машина. 5. Відомості, які підтверджують можливість здійснення винаходу. Здійснення запропонованого способу регулювання збудження електричних машин засновано на явищі Холла. Напруга на виході датчика Холла (ДХ) прямо пропорційна напруженості магнітного поля: Uix=(IHiR×10-8)/(d×j(l/a)); (6) де: і = x, y, z - проекції в декартовій системі коор динат; R - постійна Холла; d, l, а - геометричні розміри ДХ; j(І/а)- функція, залежна від розмірів ДХ. Використання системи ортогональних датчиків Холла дозволяє виміряти радіальну, тангенціальну та аксіальну компоненти вектора напруженості (індукції) магнітного поля в повітряному зазорі електричної машини. Оскільки ці компоненти повністю характеризують всі можливі інтегральні параметри режиму роботи (напругу і струм статора, активну та реактивну потужності), то регулюючи збудження по Їх відхиленню забезпечуються необхідні характеристики синхронної машини. Джерела інформації. 1. Автоматические регуляторы возбуждения. Под ред. Г.Р. Герценберга. - М., "Энергия", 1966. – 312 с. 2. Глебов И.А. Системы возбуждения мощных синхронных машин. - Л.: "Наука", 1979. – 311 с. 3. Веников В.А., Герценберг Г.Р., Совалов С.А. и др. Сильное регулирование возбуждения. - М.Л., Госэнергоиздат, 1963. - 152 с. Фіг. 1 3 38314 Фіг. 2 Фіг. 3 4 38314 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2001 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 5
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for regulation synchronous machines excitation
Автори англійськоюAhamalov Oleh Mykolaiovych
Назва патенту російськоюСпособ регулирования возбуждения синхронных машин
Автори російськоюАгамалов Олег Николаевич
МПК / Мітки
МПК: H02P 9/10
Мітки: спосіб, збудження, регулювання, синхронних, машин
Код посилання
<a href="https://ua.patents.su/5-38314-sposib-regulyuvannya-zbudzhennya-sinkhronnikh-mashin.html" target="_blank" rel="follow" title="База патентів України">Спосіб регулювання збудження синхронних машин</a>
Спосіб збудження електричного генератора з обмоткою збудження
Номер патенту: 35448
Опубліковано: 15.03.2001
Автори: Богомол Володимир Іванович, Щур Микола Іванович, Туваржіев Валентин Карпович, Борсук Евген Павлович, Ленчевський Евген Анатоліевич
МПК: H02K 23/02
Мітки: спосіб, обмоткою, збудження, електричного, генератора
Формула / Реферат:
Спосіб збудження електричного генератора з обмоткою збудження, який полягає в живленні кола збудження, що приєднано паралельно навантаженню, від обмотки якоря генератора, який відрізняється тим, що від обмотки якоря генератора електрична енергія низької напруги перетворюється вольтозбільшуючим пристроєм, що приєднано паралельно навантаженню, в електричну енергію з підвищеною напругою і подається для живлення його кола збудження.
Спосіб регулювання реактивної потужності синхронних приводних електродвигунів компресорної станції однакової номінальної потужності
Номер патенту: 6197
Опубліковано: 29.12.1994
Автори: Лазаревич Галина Юхимівна, Кобелянський Анатолій Тимофійович, Осадчій Виктор Порфірьйович, Осадчук Юрій Григорович, Алексєєнков Микола Миколайович, Лазаревич Генадій Генадійович, Ілієнко Микола Гнатович, Вайнер Аркадій Йосипович, Криворучко Світлана Марківна, Кучеров Андрій Петрович
МПК: F04D 27/00
Мітки: номінальної, синхронних, компресорної, реактивної, станції, однакової, приводних, потужності, спосіб, електродвигунів, регулювання
Формула / Реферат:
(57) Способ регулирования реактивной мощности синхронных приводных электродвигателей компрессорной станции равной номинальной мощности, включающий измерение реактивной и активной мощностей, определение полной мощности каждого двигателя и сравнение полной мощности каждого двигателя с граничными значениями, отличающийся тем, что дополнительно измеряют или задают требуемую реактивную мощность электрической сети, измеряют для каждого синхронного...
Спосіб повернення електроенергії від колекторних електродвигунів з послідовною обмоткою збудження
Номер патенту: 36995
Опубліковано: 16.04.2001
Автори: Васильєв В'ячеслав Євгенійович, Григор'єв Валентин Андрійович
Мітки: повернення, колекторних, послідовною, спосіб, електроенергії, електродвигунів, збудження, обмоткою
Текст:
...процесу гальмування при цій схемі можна робити введенням в коло резисторів, або шунтуванням обмотки збудження, або якоря за допомогою резисторів. Замість резисторів можна застосовувати відомі способи імпульсного і конденсаторно-імпульсного перетворювання. Графічна частина заявки пояснює суть винаходу. На кресленні відображено схему, де 1- якорь двигуна, до якого послідовно підключена обмотка збудження 2 через діоди 3 і 4. Схема функціонує...
Пристрій для регулювання струмів збудження тягових електродвигунів
Номер патенту: 20467
Опубліковано: 15.07.1997
Автори: Шиленко Валерій Володимирович, Далека Василь Хомич, Гайдуков Валерій Євгенович, Хворост Микола Васильович
МПК: B60L 11/02
Мітки: тягових, пристрій, струмів, електродвигунів, регулювання, збудження
Формула / Реферат:
Устройство для регулирования токов возбуждения тяговых электродвигателей, состоящее из силовой цепи, содержащей якоря и обмотки возбуждения тяговых электродвигателей, тормозной резистор, тиристорные ключи и датчик тока, а также из цепи управления, содержащей задающий элемент, задающий генератор и цепь формирования импульсов, состоящую из блока сравнения, порогового элемента, усилителя, триггера и двух формирователей импульсов, выходы...
Пристрій для регулювання струмів збудження тягових електродвигунів
Номер патенту: 20466
Опубліковано: 15.07.1997
Автори: Гайдуков Валерій Євгенович, Мінєєва Юлія Віталіївна, Далека Василь Хомич, Хворост Микола Васильович
МПК: B60L 11/02
Мітки: електродвигунів, пристрій, збудження, струмів, регулювання, тягових
Формула / Реферат:
Устройство для регулирования токов возбуждения тяговых электродвигателей, состоящее из силовой цепи, содержащей токоприемник, якоря и обмотки возбуждения тяговых электродвигателей, датчик тока и тиристорные ключи, а также цепи управления, включающей формирователь импульсов, содержащий соединенные последовательно задающий генератор, сравнивающее устройство, усилитель, триггер и два блокинг-генератора, отличающееся тем, что между якорем и...
Попередній патент: Спосіб лікування гіпертонічної хвороби і – іі стадії кардіоцеребральної форми
Наступний патент: Пристрій для вимірювання об’єму біологічного об’єкту
Випадковий патент: Керамічний двигун внутрішнього згоряння з еліпсною або овальною формою перетину циліндра і поршня