Спосіб отримання безперервних направлених внутрішніх неврівноважених сил
Текст
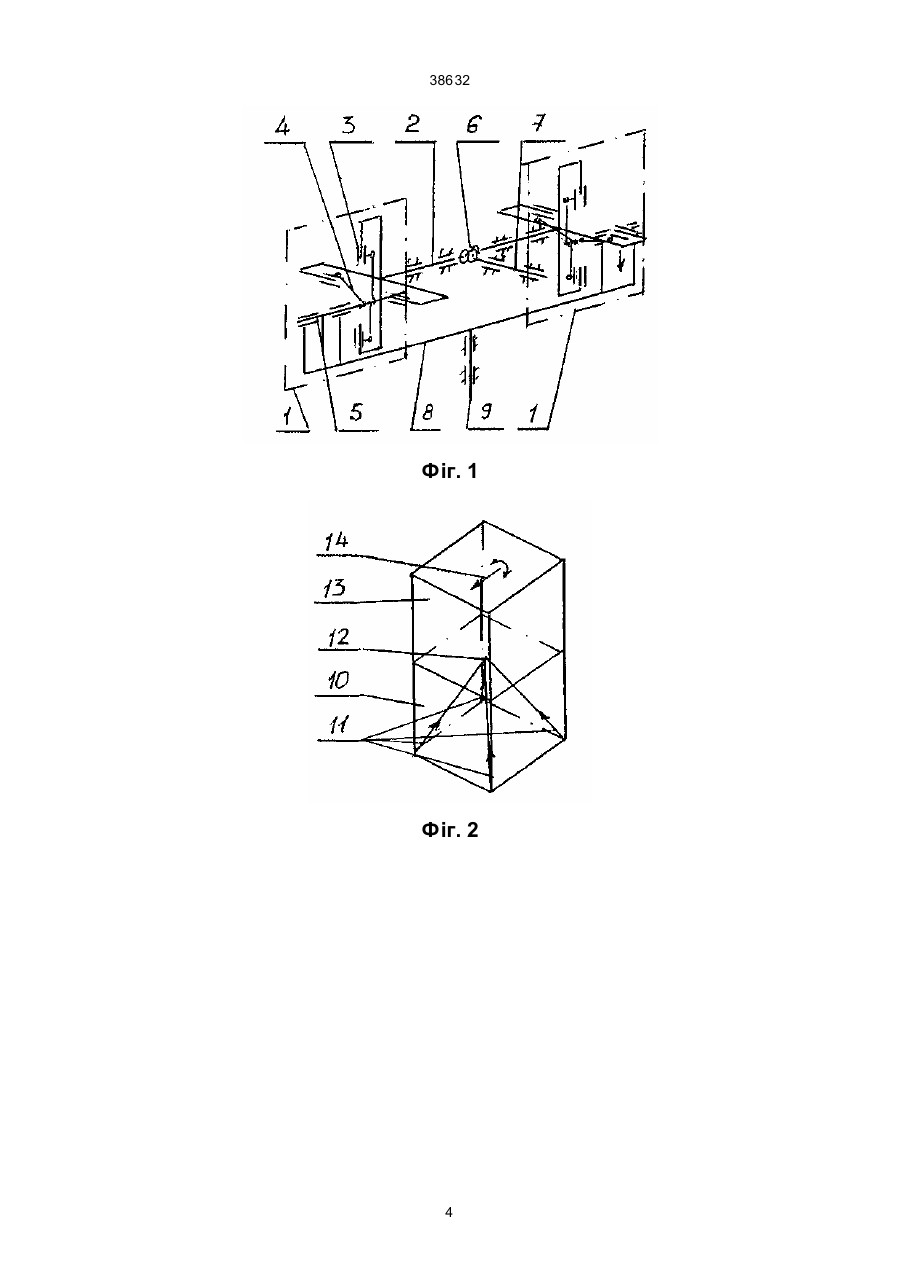
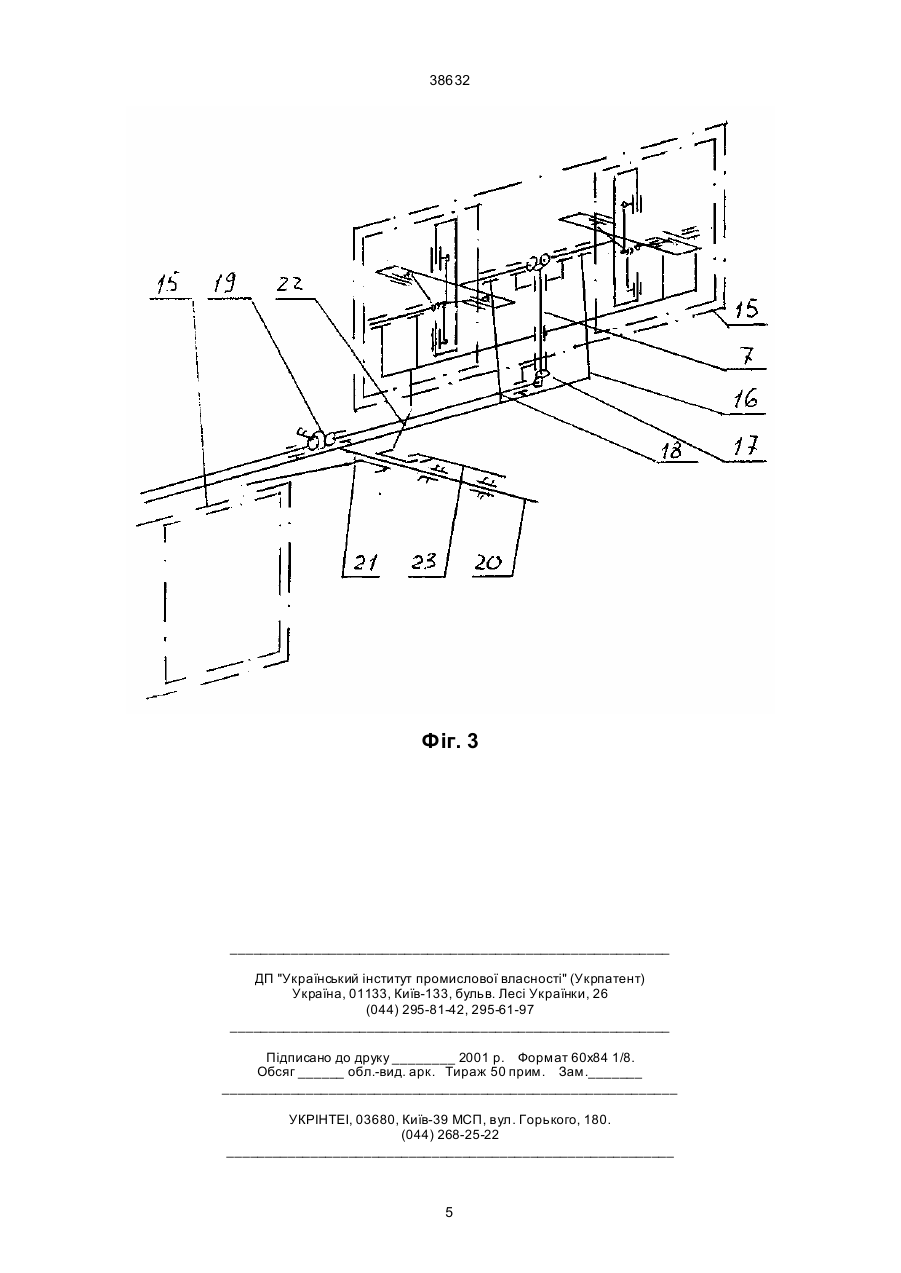
Спосіб отримання безперервних направлених внутрішніх неврівноважених сил, в якому перемішують дві однакові групи мас, кожну поступально по траєкторії у вигляді кола, причому розташуван 38632 пально по траєкторії у вигляді кола, причому розташування точок лінії траєкторії переміщення центрів мас, миттєві кутові швидкості переміщення центрів мас, фази переміщення центрів мас погоджені між собою таким чином, що переміщують другу гр упу мас в дзеркальному відображенні того, як переміщують першу гр упу мас, завдяки тому, що привід переміщення кожної групи мас здійснюють валом, вісь якого паралельна і ексцентрично розташована відносно осі траєкторії переміщення груп мас, забезпечується отримання середньої, за період переміщення груп мас, векторної величини сил інерції більшої нуля, і, за рахунок того, здійснене підтримання і переміщення корпусу космічного засобу силами інерції груп мас - гравітаційних зарядів і здійснене отримання механічної енергії силами інерції груп мас - гравітаційних зарядів. Поставлена задача вирішується способом отримання безперервних направлених внутрішніх неврівноважених сил, в якому переміщують дві однакові групи мас, кожну поступально по траєкторії у вигляді кола, причому розташування точок лінії траєкторії переміщення центрів мас, миттєві кутові швидкості переміщення центрів мас, фази переміщення центрів мас погоджені між собою таким чином, що переміщують другу гр упу мас в дзеркальному відображенні того, як переміщують першу груп у мас відносно площини симетрії в, стосовно до винаходу, привід переміщення кожної групи мас здійснюють валом, вісь якого паралельна і ексцентрично розташована відносно осі траєкторії переміщення груп мас. Спосіб отримання безперервних направлених внутрішніх неврівноважених сил реалізується у гравітаційному двигуні-приводі і реалізується у гравітаційному двигуні-енергоустановці. Винахід пояснюється малюнками, на яких показані: фіг. 1 – кінематична схема гравітаційного двигуна-приводу; фіг. 2 – схема розташування гравітаційних двигунів-приводів в корпусі космічного засобу; фіг. 3 – кінематична схема гравітаційного двигуна-енергоустановки. В гравітаційний двигун-привід введені (див. фіг. 1): два механізми - 1, кожний з яких складений: з приводного валу - 2, в напрямних фланцях якого встановлені чотири повзуни - 3, на вісь кожного повзуна - 3 одягнута одна головка індивідуального важеля - 4, друга головка важеля - 4 одягнута на вісь - 5, два приводних вали - 2 двох механізмів - 1 з'єднані зубчастою конічною парою - 6 з вхідним валом - 7, осі осей - 5 двох механізмів - 1 розташовані відповідно одна одної і з'єднані траверсою - 8, яка з'єднана зі штангою - 9, з можливістю переміщення штанги - 9 разом з траверсою - 8 і осями - 5 відносно осі приводних валів - 2, з можливістю обертання вхідного вала - 7 одночасно з обертанням приводних валів - 2 дво х механізмів 1, при якому траєкторії переміщення центрів мас повзунів - 3 (гравітаційних зарядів), миттєві кутові швидкості переміщення центрів мас повзунів - 3, фази переміщення центрів мас повзунів - 3 погоджені між собою таким чином, що переміщення повзунів - 3 другого механізму - 1 здійснене в дзеркальному відображенні того, як здійснене переміщення повзунів - 3 першого механізму - 1 відно сно площини, проведеної через осі - 5 і вісь приводних валів - 2 дво х механізмів - 1. Гравітаційний двигун-привід працює наступним чином. При рівномірному обертанні вхідного вала - 7 приводні вали - 2 двох механізмів - 1 обертаються в протилежні боки в протифазах. При переміщенні штанги - 9 траверса - 8 переміщує осі - 5 відносно приводних валів - 2. Внаслідок ексцентричного розташування осей - 5 відносно осі приводних валів - 2, важелі - 4, які ведуть повзуни - 3 по колах, здійснюють нерівномірне обертання з повзунами - 3, які є гравітаційними зарядами, результатом нерівномірного переміщення повзунів - 3 по колах є різні величини сил інерції, які виникають при переміщенні повзунів - 3 по колах, по їх різних ділянках. Тому як величина сил інерції має квадратну залежність від величини миттєвої кутової швидкості, а час переміщення повзунів - 3 по ділянках траєкторії переміщення мас – лінійну залежність від величини миттєвої кутової швидкості, середня, за період переміщення повзунів - 3, векторна величина сил інерції більша нуля. Середні, за період переміщення повзунів - 3, векторні сили інерції направлені від осі приводних валів - 2 на осі - 5 і прикладені до осей - 5 (вони показані стрілками Fін). В корпусі космічного засобу (див. фіг. 2) для стійкого положення корпусу введені: відсік - 10 підтримування і відсік - 13 переміщення, у відсік - 10 вміщені чотири гравітаційні двигуни-приводи (вони умовно не показані), сили інерції яких показані стрілками - 11, направленими до вершини піраміди - 12, основа якої відповідна основі відсіку - 10, у відсік - 13 включений один гравітаційний двигунпривід (він умовно не показаний), сили інерції якого показані стрілкою - 14, розташовані в площині, паралельній основі піраміди - 12, з можливістю повороту гравітаційного двигуна-приводу відсіку - 13 навколо вертикальної осі відсіку - 13. Переміщення корпусу космічного засобу здійснюється наступним чином. Сили -11 відсіку - 10 врівноважують силу тяжіння корпусу космічного засобу. При випадковому відхиленні вертикалі корпусу космічного засобу від вертикального положення проекції сил - 11 на вертикаль з піднятого боку зменшаться, а проекції сил - 11 на вертикаль з опущеного боку - збільшаться, що викличе поворот корпусу космічного засобу в протилежний бік до вертикального положення. Зміною величин сил - 11 можливе маневрування у вертикальному напрямі. Зміною величин і напрямів сил - 14 можливе маневрування в горизонтальній площині. В гравітаційний двигун-енергоустановку (див. фіг. 3) вміщені: два гравітаційних двигуни-приводи - 15 (умовно показаний тільки один), встановлені на лонжероні - 16, вхідний вал - 7 гравітаційного двигуна-приводу - 15 з'єднаний конічною зубчастою парою - 17 через поперечний вал - 18 з конічною зубчастою парою - 19, встановленою на вихідному валі - 20, причому зубчасте колесо пари 19, вісь якого відповідна осі вихідного вала - 20, нерухоме, на вихідний вал - 20 посаджений повзун - 21, який з'єднаний двома важелями - 22, кожний з відповідною штангою - 9 гравітаційного двигуна-приводу - 15, повзун - 21 з'єднаний з керуючою штангою - 23, причому два гравітаційні двигуни-приводи - 15 на лонжероні - 16 встановлені та 2 38632 ким чином, що вектори, кожний від осі приводних валів - 2 на осі - 5 гравітаційного двигуна-приводу 15, направлені в площині, перпендикулярній осі вихідного вала – 20, в протилежні один одному боки. Гравітаційний двигун-енергоустановка працює наступним чином. В початковому стані все - нерухоме. При обертанні вихідного вала - 20 – пуску гравітаційного двигуна-енергоустановки, по нерухомому колесу пари - 19 перекочує суміжне колесо пари - 19, обертання якого передається через поперечний вал - 18, через зубчасту пару - 17 гравітаційному двигун у-приводу - 15, встановленому на лонжероні - 16. При рівномірному (інерційному) обертанні вала - 20 в гравітаційних двигунах - 15 виникають сили інерції, середні за період переміщення повзунів гравітаційних двигунів-приводів 15, векторні величини сил інерції яких більші нуля, які направлені таким чином, що ними сформований обертальний момент на валу - 20, який компенсує втрати, викликані тертям елементів один з одним, і викликає кутове прискорене обертання вала - 20. При цьому частина механічної енергії, що виробляється гравітаційним двигуном-енергоустановкою може бути передана споживачу механічної енергії. Регулювання потужності механічної енергії, що виробляється, може бути здійснене переміщенням керуючої штанги - 23 вздовж осі вала - 20 разом з повзуном - 21, з'єднаним з важелями - 22, що викличе поворот важелів - 22 і переміщення штанги гравітаційного двигуна-приводу - 15 і зміну сил інерції, які виникають в гравітаційних двигуна х-приводах - 15. З термодинаміки відомі гіпотези "Про можливе існування теплових вічних двигунів: двигуна І-роду, двигуна II-роду, двигуна III-роду". Двигун I-роду є механізмом циклічної дії, перетворюючий потенційну енергію (внутрішню енергію) робочого тіла в циліндрі в механічну енергію механізму двигуна, що р ухається, і навпаки, причому в кінці циклу величина механічної енергії руху механізму двигуна, який рухається, повинна збільшитися (див. опис до винаходу № 98084314 від 02.11.98.: "Спосіб отримання позитивної роботи циклу кривошипношатунного механізму двигуна з термодинамічноізольованим циліндром") – фактично він працює за рахунок руху робочої шийки по визначеній траєкторії в визначеному напрямі, навантажений силами від тиску робочого тіла в циліндрі. Двигун IIроду є системою, в яку включені: відомий кривошипно-шатунний механізм двигуна і пристрій, що відбирає потенційну (вн утрішню) енергію з навколишнього середовища і передає її робочому тілу в циліндрі кривошипно-шатунного механізму двигуна (див. опис до винаходу № 97010381 від 30.01.97.: "Джерело енергії потоку контуру") – фактично він працює за рахунок зміни систем відліку в визначених фазах циклу роботи. Двигун III-роду є механізмом циклічної дії, який перетворює зміну потенційної (внутрішньої) енергії з більшого значення потенціалу на менше значення потенціалу в механічну енергію. До нього відносяться всі відомі поршневі двигуни: парова машина, двигун вн утрішнього згоряння, двигун зовнішнього згоряння. Якщо класифікацію двигунів в термодинаміці розширити на всі фізичні явища макросвіту, то всі фізичні явища макросвіту, якщо є переміщення тіл або їх частин, слід розглядати по аналогії з класифікацією двигунів в термодинаміці, як фізичні циклічні або аперіодичні вічні двигуни III-роду. В двигуна х I, II, III-роду потенційна енергія, яка перетворюється в механічну енергію під час роботи, циклічно змінюється, що є традиційним принципом роботи двигуна. В двигуні (див. опис до винаходу № 98127068 від 31.12.98: "Двигун") потенційна енергія під час роботи двигуна зовсім не змінюється, що з точки зору сучасних поглядів на процеси перетворення енергії рівнозначно її повній відсутності, хоча підпитування роботи двигуна і здійснюється статичними силами – фактично він працює за рахунок перетворення статичних сил в динамічні сили, що з точки зору принципів роботи двигуна є нетрадиційним, тому він є новим родом двигуна – двигуном IV-роду. В гравітаційному двигуні-енергоустановці фактично здійснюється виробляння механічної енергії за рахунок наявної у нього механічної енергії елементів, які рухаються, що також є нетрадиційним принципом роботи двигуна, він є двигуном V-роду. Наша цивілізація є машинною цивілізацією, від рівня ефективності роботи машин якої залежить можливість її функціонування, у своїй еволюції розвитку пройшла декілька етапів розвитку. Першим етапом розвитку є етап використання передаточних механізмів, використовуваних в різних машинах: велосипед, візок, енергетична установка яких є робота м'язів людини або тварини (до них можна віднести і представлений двигун № 98127068), а також енергетичною установкою яких є сили геофізичних процесів планети: вітер, течія води, застосовувані в вітрильниках, вітряках, а також в водяних млинах і водяних насосах. Другим етапом розвитку є етап використання поршневого двигуна, який слугує енергоустановкою машин: пароплавів, паровозів, автомобілів, мотоциклів, те хнологічних машин (до них можна віднести і представлений двигун № 98084314). Третім етапом розвитку є етап використання реактивного двигуна, використовуваного як енергоустановка лопаточних машин: турбіни, лопаточного компресора, турбокомпресора, і використовуваного як привод – ракетний двигун, реактивний авіаційний двигун, струминний реактивний судовий двигун, гвинтові двигуни: гребний гвинт, пропелер, крило літака (до них можна віднести і представлене джерело енергії потоку контуру № 97010381). Наступним, четвертим, етапом розвитку є етап використання гравітаційного двигуна-енергоустановки і використання гравітаційного двигуна-приводу. Техніко-економічний ефект від використання винаходу складається в розширенні видів енергоустановок, що зменшує вартість механічної енергії і необмежене в часі, збільшить автономність роботи енергоустановки і можливість автономного переміщення космічних засобів. 3 38632 Фіг. 1 Фіг. 2 4 38632 Фіг. 3 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2001 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УКРІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 5
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for creating continuous directional internal unbalanced forces
Автори англійськоюChuhui Volodymyr Leonidovych
Назва патенту російськоюСпособ получения непрерывных направленных внутренних неуравновешенных сил
Автори російськоюЧугуй Владимир Леонидович
МПК / Мітки
МПК: B64G 1/28
Мітки: внутрішніх, неврівноважених, отримання, направлених, спосіб, сіль, безперервних
Код посилання
<a href="https://ua.patents.su/5-38632-sposib-otrimannya-bezperervnikh-napravlenikh-vnutrishnikh-nevrivnovazhenikh-sil.html" target="_blank" rel="follow" title="База патентів України">Спосіб отримання безперервних направлених внутрішніх неврівноважених сил</a>
Спосіб отримання внутрішніх нерівноважних сил
Номер патенту: 35818
Опубліковано: 16.04.2001
Автор: Чугуй Володимир Леонідович
МПК: B64G 9/00
Мітки: спосіб, нерівноважних, отримання, сіль, внутрішніх
Формула / Реферат:
Спосіб отримання внутрішніх нерівноважних сил, в якому повертають дві однакові групи вантажів, кожну навколо індивідуальної осі, розташованих аксцентрично до відповідних осей, розташування осей, радіуси дуг траєкторій повороту, кутові швидкості повороту, фази повороту вибрані таким чином, що повертають другу групу вантажів в дзеркальному відображенні того, як повертають першу групу відносно площини симетрії, який відрізняється тим, що...
Пристрій для з’єднання направлених один до одного торцями об’єктів
Номер патенту: 16180
Опубліковано: 29.08.1997
Автори: Нагайник Іван Миколайович, Співаковський Євген Наумович
Мітки: одного, об'єктів, пристрій, з'єднання, торцями, направлених
Формула / Реферат:
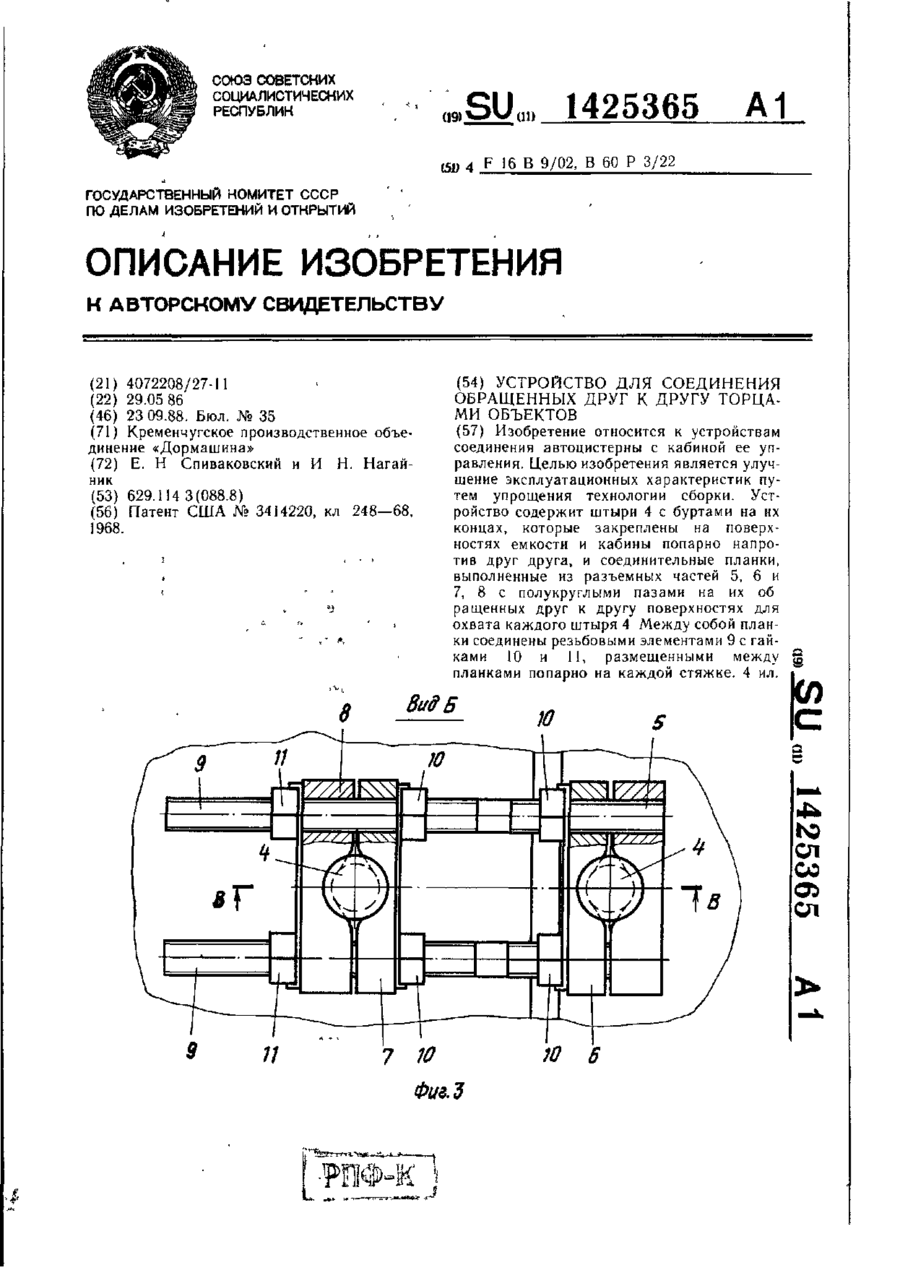
Устройство для соединения обращенных друг к другу торцами объектов, преимущественно кузова автоцистерны ч кабины управления транспортного средства, содержащеесосдинитсльныс планки, выполненные каждая из двух разъемных частей с полукруглыми пазами на обращенных одна к другой поверхностях для образования отверстия, связанных между собой резьбовыми соединительными элементами, проходящими через дополнительные отверстия, выполненные в частях...
Спосіб виготовлення безперервних мінеральних волокон
Номер патенту: 3
Опубліковано: 30.04.1993
Автори: Смирнов Леонід Миколаєвич, Кравченко Анатолій Васильович, Єжов Анатолій Олександрович, Мєдвєдєв Олександр Олександрович, Соколинський Михайло Абавич, Цибуля Юрій Львович
МПК: C03B 37/00
Мітки: волокон, безперервних, мінеральних, спосіб, виготовлення
Формула / Реферат:
Способ изготовления непрерывных минеральных волокон из базальтовых пород путем плавления базальта, подачи базальтового расплава в зону выработки для струйной подачи к фильерам, отличающийся тем, что отбор базальтового расплава для подачи к фильерам ведут в зоне расположения на высоте 0,2-0,8 от высоты уровня расплава в зоне выработки.
Пристрій для абразивної обробки замкнених внутрішніх контурів деталей
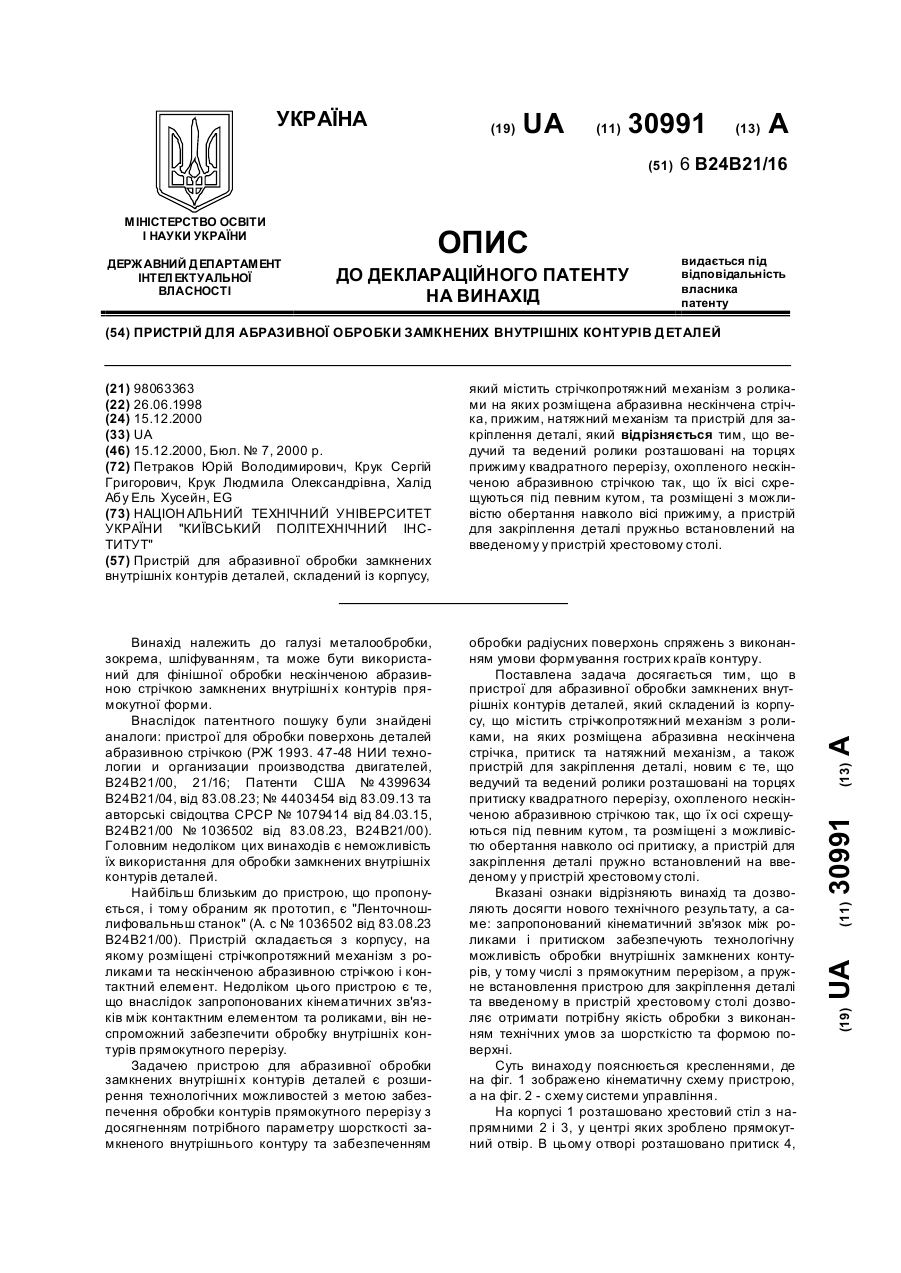
Номер патенту: 30991
Опубліковано: 15.12.2000
Автори: Крук Сергій Григорович, Петраков Юрій Володимирович, Халід Абу Ель Хусейн, Крук Людмила Олександрівна
МПК: B24B 21/00
Мітки: замкнених, внутрішніх, абразивної, контурів, деталей, пристрій, обробки
Текст:
...ролик 6 передає рух абразивній стрічці 8, котра охоплює притиск 4 і ведений ролик 7 та натягується натяжним механізмом 9. Крім того, обертання вала 11 двигуна 12 через шків 15, кліноремінну передачу 14 передається на несучий шків 13. Таким чином, ролики 6 і 7 разом зі стрічкою 8 обертаються навколо притиску 4, котрий взаємодіє з поверхнею деталі 25, що має можливість самовстановлення завдяки пружному закріпленню стільця 26 на верхній...
Фідер печі для вироблення безперервних ниток
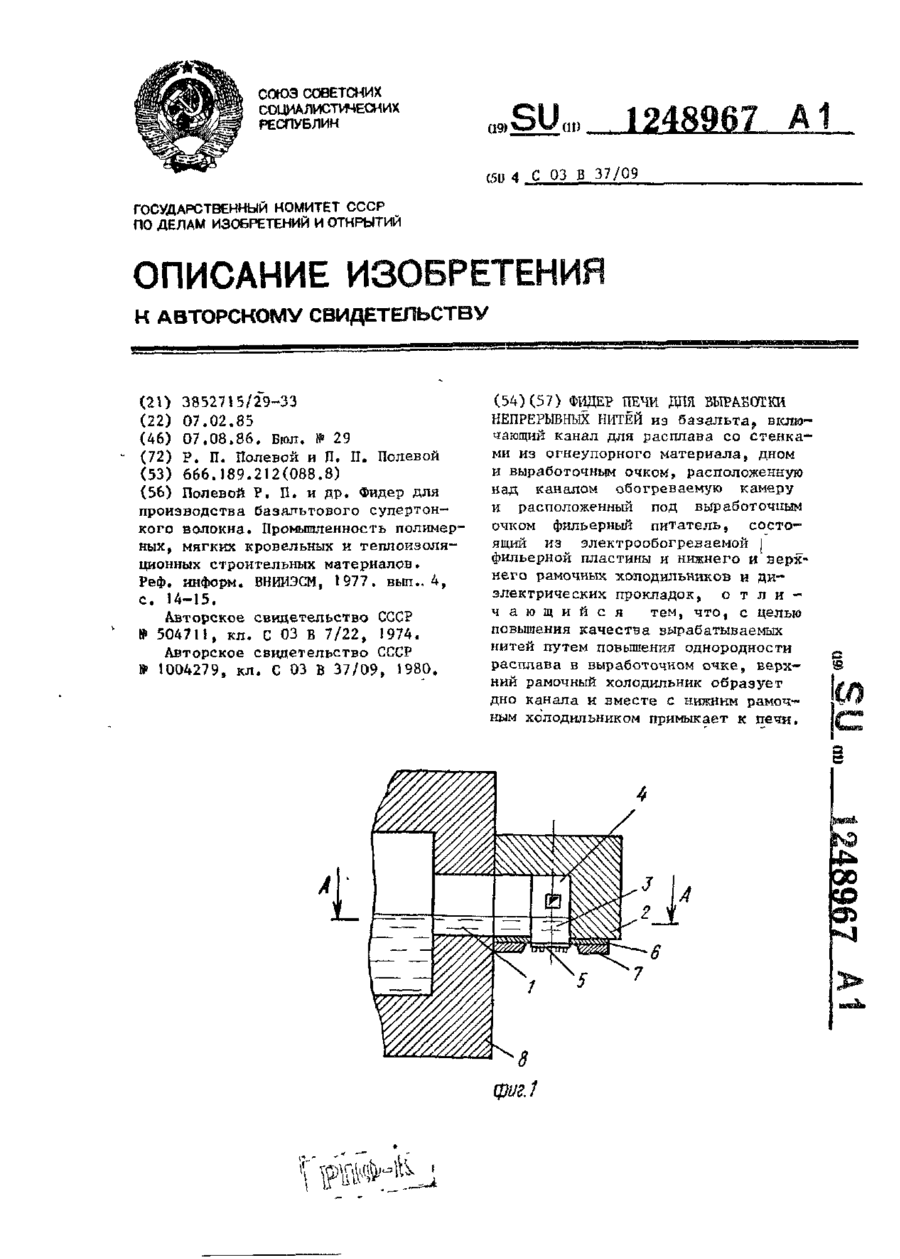
Номер патенту: 991
Опубліковано: 30.12.1993
Автори: Польовий Петро Петрович, Польовий Ренат Петрович
МПК: C03B 37/09
Мітки: печі, ниток, фідер, вироблення, безперервних
Формула / Реферат:
(57) ФИДЕР ПЕЧИ ДЛЯ ВЫРАБОТКИ НЕПРЕРЫВНЫХ НИТЕЙ из базальта, включающий канал для расплава со стенками из огнеупорного материала, дном и выработочным очком, расположенную над каналом обогреваемую камеру и расположенный под выработочным очком фильерный питатель, состоящий из электрообогреваемой фильерной пластины и нижнего и верхнего рамочных холодильников и диэлектрических прокладок, отличающийся тем, что, с целью повышения качества...
Попередній патент: Спосіб оцінки ефективності лікування хворих на псоріаз
Наступний патент: Ручні ножиці для різання дроту та сталевих канатів
Випадковий патент: Спосіб виготовлення ікри чорної зернистої з натуральних продуктів "фіто лп-7"