Електродинамічний вібратор
Номер патенту: 40446
Опубліковано: 16.07.2001
Автори: Пузько Ігор Данилович, Павловський Михайло Антонович, Хворост Володимир Андрійович

Формула / Реферат
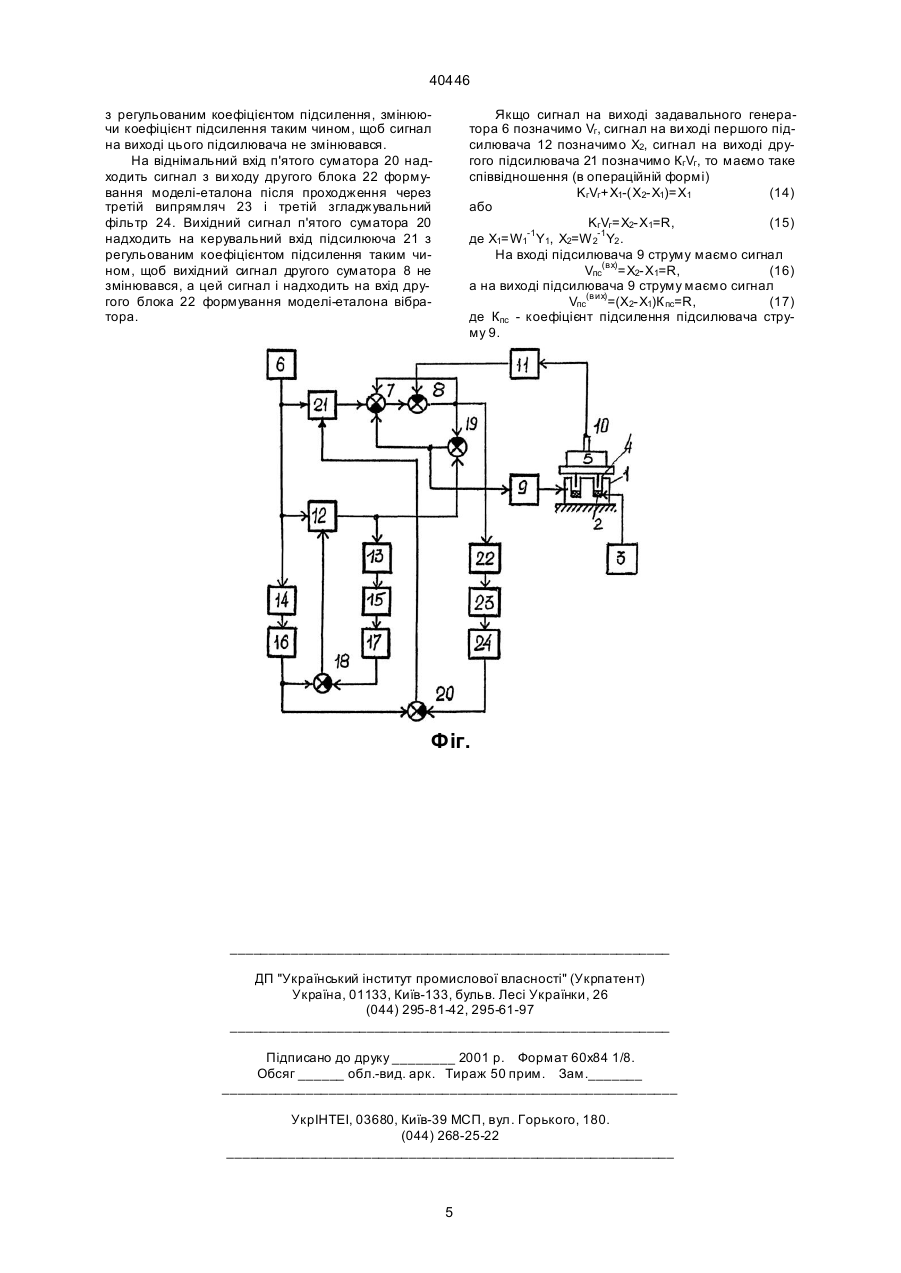
Електродинамічний вібратор, що містить магнітопровід з обмоткою підмагнічування, установлену в повітряному зазорі магнітопроводу рухому циліндричну котушку, довжина якої більша довжини повітряного зазору, задавальний генератор, підсилювач струму, вихід якого під'єднаний до обмотки рухомої циліндричної котушки, перший і другий суматори, коло зворотного зв'язку, що складається з послідовно з'єднаних датчика положення рухомої котушки і блока зворотного зв'язку, вихід якого під'єднаний до віднімального входу другого суматора, перший блок формування моделі - еталона вібратора, перший і другий випрямлячі, перший і другий згладжувальні фільтри, третій і четвертий суматори, перший підсилювач з регульованим коефіцієнтом підсилення, вихід задавального генератора під'єднаний через перший підсилювач з регульованим коефіцієнтом підсилення до входу першого блока формування моделі - еталона вібратора, а через послідовно з'єднані перший випрямляч і перший згладжувальний фільтр - до підсумовувального входу третього суматора, до віднімального входу якого під'єднаний через послідовно з'єднані другий випрямляч і другий згладжувальний фільтр вихід першого блока формування моделі - еталона вібратора, а вихід третього суматора сполучений з керувальним входом першого підсилювача з регульованим коефіцієнтом підсилення, під'єднаного своїм виходом до підсумовувального входу четвертого суматора, до віднімального входу якого під'єднаний вихід другого суматора, а вихід четвертого суматора і його віднімальний вхід сполучені з віднімальним і підсумовувальним входами першого суматора відповідно, вихід першого суматора під'єднаний до входу другого суматора, який відрізняється тим, що він додаткове містить другий блок формування моделі - еталона вібратора, третій випрямляч, третій згладжувальний фільтр, п'ятий суматор, другий підсилювач з регульованим коефіцієнтом підсилення, причому вихід зада сального генератора сполучений з підсумовувальним входом першого суматора через другий підсилювач з регульованим коефіцієнтом підсилення, керувальний вхід якого під'єднаний до виходу п'ятого суматора, підсумовувальний вхід якого сполучений з виходом першого згладжувального фільтра, а віднімальний вхід - з виходом третього згладжувального фільтра, вхід якого через послідовно з'єднані другий блок формування моделі - еталона вібратора і третій випрямляч сполучений з виходом другого суматора, а вихід четвертого суматора сполучений з входом підсилювача струму.
Текст
Електродинамічний вібратор, що містить магнітопровід з обмоткою підмагнічування, установлену в повітряному зазорі магнітопроводу рухому циліндричну котушку, довжина якої більша довжини повітряного зазору, задавальний генератор, підсилювач струму, вихід якого під'єднаний до обмотки рухомої циліндричної котушки, перший і другий суматори, коло зворотного зв'язку, що складається з послідовно з'єднаних датчика положення рухомої котушки і блока зворотного зв'язку, ви хід якого під'єднаний до віднімального входу другого суматора, перший блок формування моделіеталона вібратора, перший і другий випрямлячі, перший і другий згладжувальні фільтри, третій і четвертий суматори, перший підсилювач з регульованим коефіцієнтом підсилення, вихід задавального генератора під'єднаний через перший підсилювач з регульованим коефіцієнтом підсилення до входу першого блока формування моделіеталона вібратора, а через послідовно з'єднані перший випрямляч і перший згладжувальний фільтр - до підсумовувального входу третього су A (54) ЕЛЕКТРОДИНАМІЧНИЙ ВІБРАТОР 40446 підмагнічування, установлену в повітряному зазорі магнітопроводу рухому циліндричну котушку, довжина якої більша довжини повітряного зазору, задавальний генератор, під'єднаний до обмотки рухомої циліндричної котушки через послідовно з'єднані перший і другий суматори і підсилювач струму, а також коло зворотного зв'язку, що містить послідовно з'єднані датчик положення рухомої котушки і блок зворотного зв'язку, ви хід якого сполучений з другим входом другого суматора, блок формування моделі-еталона вібратора, перший та другий випрямлячі, перший та другий згладжувальні фільтри, третій та четвертий суматори і підсилювач з регульованим коефіцієнтом підсилення, причому вихід задавального генератора сполучений через підсилювач з регульованим коефіцієнтом підсилення до входу блоку формування моделі-еталона вібратора, а через послідовно з'єднані перший випрямляч і перший згладжувальний фільтр - до підсумовувального входу третього суматора, до віднімального входу якого під'єднаний через послідовно з'єднані другий випрямляч і другий згладжувальний фільтр вихід блока формування моделі-еталона вібратора, а вихід третього суматора сполучений з керувальним входом підсилювача з регульованим коефіцієнтом підсилення, який під'єднаний своїм виходом до віднімального входу четвертого суматора, до підсумовувального входу якого під'єднаний вихід другого суматора, а вихід третього суматора і його підсумовувальний вхід під'єднані, відповідно, до другого і третього входів першого суматора (див.: А.с. СРСР № 902861, МПК В06В1/04, 1982). Основним недоліком цього пристрою є недостатня точність, що призводить до обмеженої області використання, обумовлена похибкою при формуванні силового навантаження на випробуваний об'єкт, що начебто змінюється по закону, що визначається сигналом на виході задавального генератора. При формуванні структурної схеми прототипу бралися до уваги наступні міркування. Операційне зображення переміщення Y1(p) рухомої платформи вібратора з випробуваним об'єктом являє собою рішення диференційного рівняння другого порядку, а саме: (m 1p2+b1p+c1)Y1(p)+R(p)=F(p) (1) де m 1 - маса рухомої системи ЕДВ разом з випробуваним об'єктом; ЕДВ - електродинамічний вібратор; b1 - коефіцієнт опору системи вібратора; c1 - коефіцієнт жорсткості системи вібратора; P=d/dt; Y1(p) - операційне зображення переміщення рухомої платформи при установці на платформі ЕДВ випробуваного об'єкту (ВО); F(р) - операційне зображення заданої силової дії; R(p) - задане силове навантаження на випробуваний об'єкт (реакція опори). Операційне зображення переміщення Y2(p) рухомої платформи вібратора при відсутності на платформі випробуваного об'єкту являє собою рішення диференційного рівняння другого порядку, а саме: (m 2p2+b2p+c2)Y2(p)=F(p) (2) де m 2 - маса рухомої платформи EДВ без маси випробуваного об’єкту; b2, c2 - коефіцієнти опору та жорсткості рухомої системи вібратора. До речі, можна прийняти умову m 1¹m 2, b1=b2, c1=c2. Операційне зображення (1), (2) залишимо у формі W1-1(p )Y1(p ) + R (p ) = F( p)ü ï (3) ý -1 W2 ( p)Y2 (p ) = F( P) ï þ де W1(p)=(m 1p2+b1p+c1)-1; W2(p)=(m 2p2+b2p+c2)-1 передатні функції рухомої системи вібратора, якщо рахувати установку випробуваного об'єкту (ВО), то операційне зображення переміщення є Y1(p) при відсутності ВО – Y2(p). Із системи рівнянь (3) маємо співвідношення: R(p)=W2-1(p)Y2(p)-W 1-1(p)Y1(p) (4) Із (4) маємо формулу: Y1(p)=[K Г VГ(p)-R(p)+W1-1(p)Y1(p)]W1(p) (5) де Кг - коефіцієнт підсилення напруги VГ(p) задавального генератора. Співвідношення (5) визначає алгоритм формування заданого силового навантаження (силової дії R(p)) на випробуваний об'єкт. Якщо позначити W1-1(p)Y1(p)=Х1(р), W2-1(p)Y2(p)=Х2(р), (6) то співвідношення (6) має вигляд KГV(p)=Х2(р)-Х1(р)=R(p). (7) В пристрої прототипі сигнал на виході задавального генератора відповідає співвідношенню (7), а на вхід обмотки рухомої котушки надходить сигнал Х1(р) (в операційній формі). На підставі (7) маємо вираз: Х1(р)=Х2(р)-R(р). (8) Таким чином, Х1(р)¹R(p) (9) або Х1(р)=Х2(р)-KГ VГ(p), (10) тобто Х1(р)¹KГ VГ(p) (11) і тільки при Х2(р)
ДивитисяДодаткова інформація
Автори англійськоюPuz'ko Ihor Danylovych, Pavlovskyi Mykhailo Antonovych, Khvorost Volodymyr Andriiovych
Автори російськоюПузько Игорь Данилович, Павловский Михаил Антонович, Хворост Владимир Андреевич
МПК / Мітки
МПК: B06B 1/02
Мітки: електродинамічний, вібратор
Код посилання
<a href="https://ua.patents.su/5-40446-elektrodinamichnijj-vibrator.html" target="_blank" rel="follow" title="База патентів України">Електродинамічний вібратор</a>
Електродинамічний вібратор
Номер патенту: 37999
Опубліковано: 15.05.2001
Автори: Пузько Ігор Данилович, Павловський Михайло Антонович, Хворост Володимир Андрійович
МПК: B06B 1/02
Мітки: електродинамічний, вібратор
Текст:
...R(p) на випробуваний об'єкт, а саме: 1) сформувати сигнал Х2, операційним зображенням якого є постійного струму, рухому циліндричну котушку 4 з платформою (на кресленні не позначена) та випробуваним об'єктом 5, закріпленим на платформі, задавальний генератор 6, перший суматор 7, другий суматор 8, підсилювач 9 струму, да тчик 10 положення рухомої котушки, блок 11 зворотного зв'язку, підсилювач 12 з регульованим коефіцієнтом підсилення, блок...
Електродинамічний вібратор
Номер патенту: 38228
Опубліковано: 15.05.2001
Автори: Павловський Михайло Антонович, Хворост Володимир Андрійович, Пузько Ігор Данилович
МПК: B06B 1/02
Мітки: вібратор, електродинамічний
Формула / Реферат:
Дата прийняття рішення 28.12.2000р.(21) 2000063371(54) (57) Електродинамічний вібратор, що містить магнітопровід з обмоткою підмагнічування, установлену в повітряному зазорі магнітопровода рухому котушку, довжина якої більше довжини повітряного зазору, задавальний регенератор, вихід якого сполучений з входом першого підсилювача, послідовно з’єднане з обмоткою рухомої котушки, і платформу, на...
Перетворювач змін частоти сигналу у фазовий зсув
Номер патенту: 36610
Опубліковано: 16.04.2001
Автор: Рапін Володимир Васильович
МПК: H03L 7/00
Мітки: перетворювач, фазовий, частоти, змін, сигналу, зсув
Текст:
...до входу др угого підсилювача з автоматичним регулюванням підсилення 7, вихід цього підсилювача з'єднаний з другими входами блоків формування сигналу синхронізації 2, 3, 4 (n+1 блок). Структурна схема блоку формування сигналу синхронізації містить послідовно з'єднані суматор 8 і підсилювач з автоматичним регулюванням підсилення 9, причому перший та другий входи суматора 8 є також першим та другим входами блоку формування сигналу...
Пристрій для діагностування форсунки дизеля
Номер патенту: 39769
Опубліковано: 15.06.2001
Автор: ХАРКІВСЬКИЙ ДЕРЖАВНИЙ ПОЛІТЕХНІЧНИЙ УНІВЕРСИТЕТ
МПК: G01M 15/00
Мітки: діагностування, дизеля, пристрій, форсунки
Формула / Реферат:
Пристрій для діагностування форсунки дизеля, що містить встановлені на форсунці постійний магніт і магніточутливий елемент із сердечником і навитими на нього основною і додатковою обмотками, додаткова обмотка через резистор приєднана до генератора високочастотного гармонійного сигналу, резистор підключений паралельно входу двопівперіодного випрямляча, вихід якого через перший фільтр нижніх частот зв'язаний з першим вихідним затиском...
Вібратор до електронасосів побутових вібраційних
Номер патенту: 34151
Опубліковано: 15.02.2001
Автор: Фірсов Анатолій Тимофійович
МПК: F04B 47/00
Мітки: вібратор, побутових, електронасосів, вібраційних
Текст:
...ви лучити з конструкції три деталі, які дорого коштують - муфту, ді афрагму та упор, зменшити номенклатуру шайб і гайок, дозволило укоротити і зміцнити шток, то в кінцевому підсумку робить насос більш надійним, зменшує його собівартість і габарити. Вібратор може бути застосованим при запуску нових насосів. А та кож на насосах, що випускають, для чого треба замінити сполукаєму з поршнем вібратора деталь насоса, що легко зробити як в...
Попередній патент: Спосіб регулювання режиму роботи системи водяного опалювання
Наступний патент: Комплексна добавка до бетонної суміші
Випадковий патент: Крокети картопляні "фелі" з зародками пшениці та начинкою з броколі і ламінарії