Електродинамічний вібратор
Номер патенту: 37999
Опубліковано: 15.05.2001
Автори: Павловський Михайло Антонович, Хворост Володимир Андрійович, Пузько Ігор Данилович
Текст
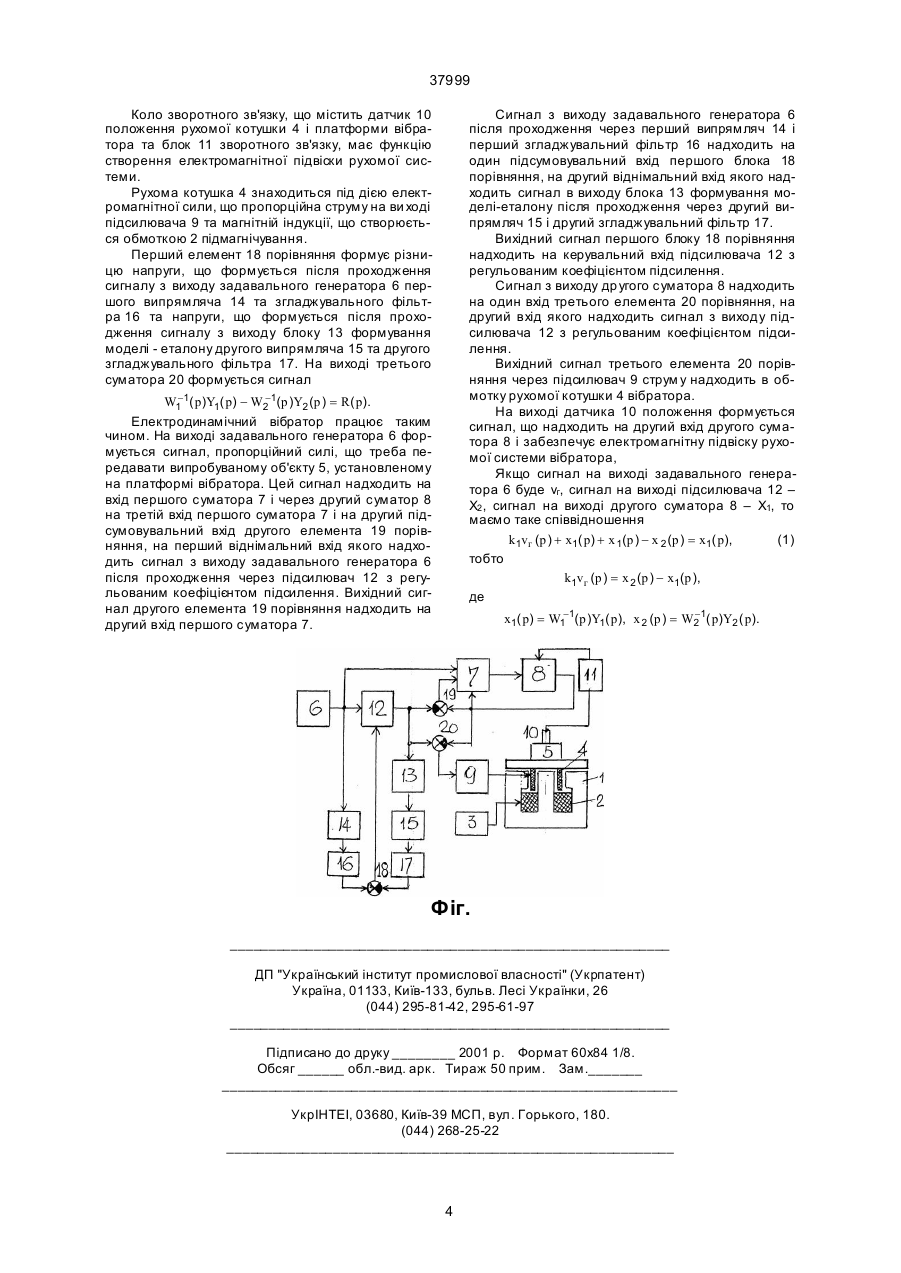
Електродинамічний вібратор містить магнітопровід з обмоткою підмагнічування, установлену в повітряному зазорі магнітопроводу рухому циліндричну котушк у, довжина якої більше довжини повітряного зазору, задавальний генератор, вихід якого під'єднаний до входу другого суматора через перший суматор, підсилювач струму, ви хід якого під'єднаний до рухомої циліндричної котушки, коло зворотного зв'язку, що складається з послідовно з'єднаних датчика положення рухомої циліндричної котушки і блока зворотного зв'язку, ви хід якого під'єднаний до другого входу др угого суматора, блок формування моделі - еталону вібраторі, перший і другий випрямлячі, перший і другий згладжувальні фільтри, перший і другий елементи порівняння і підсилювач з регульованим коефіцієнтом підсилення, вихід задавального генератора A (54) ЕЛЕКТРОДИНАМІЧНИЙ ВІБРАТОР 37999 моделі-еталону вібратора, перший та другий випрямлячі, перший та другий згладжуючі фільтри, перший та другий елементи порівняння та підсилювач з регульованим коефіцієнтом підсилення, причому вихід задавального генератора сполучений через підсилювач з регульованим коефіцієнтом підсилення до входу блоку формування моделі-еталону, а через послідовно з'єднані перший випрямляч і перший згладжувальний фільтр - до одного входу першого елемента порівняння, до другого входу якого під'єднаний через послідовно з'єднані другий випрямляч і другий згладжувальний фільтр вихід блоку формування моделіеталону, а вихід першого елемента порівняння сполучений з керувальним входом підсилювача з регульованим коефіцієнтом підсилення, який під'єднаний своїм виходом до одного входу другого елемента порівняння, до другого входу якого під'єднаний вихід другого суматора, а вихід другого елемента порівняння і його другий вхід під'єднані відповідно до другого та третього входів першого суматора (див.: А.с. СССР № 902861, МПК В06В1/04, 1982). Основним недоліком цього пристрою є недостатня точність, що призводить до обмеженої області використання, обумовлена похибкою при формуванні силового навантаження на випробуваний об'єкт, що начебто змінюється за законом, що визначається сигналом на виході задавального генератора. При формуванні структурної схеми прототипу бралися до уваги наступні міркування. Операційне зображення переміщення Y1(p) рухомої платформи вібратора з випробуваним об'єктом являє собою рішення диференційного рівняння другого порядку, а саме: (ВО), то операційне зображення переміщення є Y1(p), при відсутності ВО – Y2(p). Із системи рівнянь (3) маємо співвідношення: R( p) = W2 1(p )Y2 (p ) - W1 1( p)Y1( p). Із (4) маємо формулу Y1(p ) = [ k1v г ( p) - R( p) + W1 1( p)Y1( p)] W1(p ), (5) де k1-коефіцієнт підсилення vг(р). Співвідношення (5) визначає алгоритм формування заданого силового навантаження (силової дії R(p)) на випробуваний об'єкт. Якщо позначити W1 1( p)Y1(p ) = x1( p), W2 1(p )Y2 ( p) = x 2 ( p), (6) то співвідношення (6) має вигляд k1vг (p) = x 2 (p ) - x 1(p ) = R( p). (7) В пристрої-прототипі сигнал на виході задавального генератора (6) відповідає співвідношенню (7), а на вхід обмотки рухомої котушки надходить сигнал Х1(р) (в операційній формі). На підставі (7) маємо вираз x1( p) = x 2 (p ) - R (p ). Таким чином, x1( p) ¹ R ( p), або x1( p) = x 2 ( p) - k1v г (p ), тобто x1( p) ¹ k1v г ( p), що і пояснює недостатню точність відомого пристрою (прототипу). В основу винаходу поставлене завдання створити такий електродинамічний вібратор, в якому за рахунок нової структурної схеми системи керування, а саме: за рахунок введення третього блоку порівняння, на віднімальний і підсумовувальний входи якого надходять сигнали з виходу другого суматора і виходу підсилювача з регульованим коефіцієнтом підсилення відповідно, а вихідний сигнал третього блоку порівняння надходить на вхід підсилювача струму. На вході рухомої котушки вібратора формується сигнал, що реалізує такий алгоритм формування силового впливу на випробуваний об'єкт, який відповідає і дорівнює заданій силовій дії з меншою похибкою порівняно з прототипом, тобто забезпечує більш високу точність, що призводить до розширення класу розв'язуваних задач і області використання пристрою. Поставлене завдання реалізується тим, що електродинамічний вібратор містить магнітопровід з обмоткою підмагнічування, установлену в повітряному зазорі магнітопроводу, рухому циліндричну котушку, довжина якої більше від довжини повітряного зазору, задавальний генератор, вихід якого під'єднаний до входу др угого суматора через перший суматор, підсилювач струму, вихід якого під'єднаний до рухомої циліндричної котушки, коло зворотного зв'язку, що складається з послідовно з'єднаних датчика положення рухомої циліндричної котушки і блока зворотного зв'язку, ви хід якого під'єднаний до другого входу др угого суматора, блок формування моделі-еталону вібратора, перший і другий випрямлячі, перший і другий згладжувальні фільтри, перший і другий елементи порівняння і підсилювач з регульованим коефіцієнтом підсилення, вихід задавального генератора під'єд (m 1p 2 + b1p + c1)Y1(p ) + R( p) = F( p), де m 1 –маса рухомої системи ЕДВ разом з випробуваним об'єктом; b1 - коефіцієнт опору; c1 – коефіцієнт жорсткості; Y1(p) - операційне зображення переміщення при установці на платформі ЕДВ випробуваного об'єкту (ВО); F(p) - операційне зображення заданої силової дії; R(p) - задане силове навантаження на випробуваний об'єкт (реакція опори). Операційне зображення переміщення Y2(p) рухомої платформи вібратора при відсутності на платформі випробуваного об'єкту являє собою рішення диференційного рівняння другого порядку, а саме: (m 2p 2 + b2 p + (c 2 )Y2 ( p) = F( p), (2) де m 2 - маса рухомої платформи ВДВ без маси випробуваного об'єкту; b2, c 2- коефіцієнти опору та жорсткості. До речі, можна прийняти умову m1 ¹ m 2 , = b 2, = c 2 . b1 c1 Операційне зображення (1), (2) запишемо у формі W1 1( p)Y1( p) + R (p) = F(p ),ü ï (3) ý -1 W2 ( p)Y2 ( p) = F( p), ï þ де W1 1( p) = m1p 2 + b1p + c1, (4) W2 1( p) = m 2p 2 + + b 2 p + c 2 - передаточні функції рухомої системи. Якщо рахувати установку випробуваного об'єкту 2 37999 наний через підсилювач з регульованим коефіцієнтом підсилення до входу блока формування моделі-еталону, а через послідовно з'єднані перший випрямляч і перший згладжувальний фільтр - до підсумовувального входу першого елемента порівняння, до віднімального входу якого під'єднаний через послідовно з'єднані другий випрямляч і другий згладжувальний фільтр вихід блока формування моделі-еталону, а ви хід першого елемента порівняння сполучений з керувальним входом підсилювача з регульованим коефіцієнтом підсилення, під'єднаного своїм виходом до віднімального входу др угого елемента порівняння, до підсумовувального входу якого під'єднаний вихід другого суматора, а вихід другого елемента порівняння і його підсумовувальний вхід з'єднані відповідно з другим і третім входами першого суматора, який відрізняється тим, що він додатково містить третій елемент порівняння, причому вихід др уго го суматора сполучений з віднімальним входом третього елемента порівняння, підсумовувальний вхід якого сполучений з виходом підсилювача з регульованим коефіцієнтом підсилення, а вихід - з входом підсилювача струму. Співвідношення (7) пояснює алгоритм формування заданого силового навантаження R(p) на випробуваний об'єкт, а саме: 1) сформувати сигнал Х2, операційним зображенням якого є постійного струму, рухому циліндричну котушку 4 з платформою (на кресленні не позначена) та випробуваним об'єктом 5, закріпленим на платформі, задавальний генератор 6, перший суматор 7, другий суматор 8, підсилювач 9 струму, да тчик 10 положення рухомої котушки, блок 11 зворотного зв'язку, підсилювач 12 з регульованим коефіцієнтом підсилення, блок 13 формування моделіеталону вібратора, перший та другий випрямлячі 14 та 15 відповідно, перший та другий згладжувальні фільтри 16 та 17 відповідно, перший, другий та третій елементи 18, 19 та 20 порівняння відповідно. Елементи пристрою з'єднані наступним чином. Вихід задавального генератора, 6 сполучений з першим входом першого суматора 7, вихід якого через другий суматор 8 сполучений з його третім входом. Вихід задавального генератора 6 сполучений через підсилювач 12 з регульованим коефіцієнтом підсилення до одного віднімального входу другого елемента 19 порівняння, до другого підсумовувального входу якого під'єднаний вихід другого суматора 8, а вихід другого елемента 19 порівняння сполучений з другим входом першого суматора 7. Окрім того, вихід задавального генератора 6 через послідовно з'єднані перший випрямляч 14 та перший згладжувальний фільтр 16 сполучений з підсумовувальним входом першого елемента 18 порівняння, другий віднімальний вхід якого через послідовно з'єднані блок 13 формування моделіеталону, другий випрямляч 15 та другий згладжувальний фільтр 17 сполучений з виходом підсилювача 12 з регульованим коефіцієнтом підсилення. Вихід першого елемента 18 порівняння сполучений з керувальним входом підсилювача 12 з регульованим коефіцієнтом підсилення. Датчик 10 положення рухомої котушки має жорстке кріплення на платформі, а його вихід через блок 11 зворотного зв'язку сполучений з другим входом другого суматора 8. Вихід другого суматора 8 сполучений з віднімальним входом третього елемента 20 порівняння, підсумовувальний вхід якого сполучений з виходом підсилювача 12 з регульованим коефіцієнтом підсилення. Вихід третього елемента 20 порівняння сполучений з входом підсилювача струму 9 і через нього - з обмоткою рухомої циліндричної котушки 4 вібратора. Підсилювач 12 з регульованим коефіцієнтом підсилення визначає незалежність сигналу на вході блока 13 формування моделі-еталону від зміни величини напруги на виході задавального генератора 6. Блок 13 формування моделі-еталона являє собою функціональний перетворювач сигналу, що формує передаточну функцію вібратора без урахування впливу випробуваного об'єкту. Окрім того, блок 13 корегує коефіцієнт підсилення підсилювача 12 при появі різних дестабілізуючих факторів та підтримує постійним його вихідний сигнал. Другий елемент 19 порівняння формує різницю сигналів, що поступають з виходів підсилювача 12 та другого суматора 8. Третій елемент 20 порівняння формує різницю сигналів, що поступають з виходів підсилювача 12 з регульованим коефіцієнтом підсилення та другого суматора 8. x 2 (p ) = W2 1(p )Y2 (p ); 2) сформувати сигнал X1, операційним зображенням якого є x 2 ( p) = W1-1(p )Y1( p); 3) сформувати різницю операційних зображень сигналів x 2 ( p) - x1( p). Причому, якщо сигнал Х1 формується на виході другого суматора (див. схему прототипe), а сигнал X2 на виході підсилювача з регульованим коефіцієнтом підсилення, то сигнал, що дорівнює може бути сформований як різниця сигналів на виході блока порівняння, на підсумовувальний вхід якого надходить сигнал X2, а на віднімальний вхід - сигнал X1. Таким чином, формується сигнал, що дорівнює R не на виході задавального генератора, а на вході підсилювача струму, що і забезпечує підвищення точності, пристрою. Уся сукупність суттєви х ознак пристрою забезпечує підвищення точності формування заданого силового навантаження на випробували об'єкт за рахунок використання інформації, що міститься в сигналі на виході другого суматора і сигналі на виході підсилювача з регульованим коефіцієнтом підсилення. Алгоритм для підвищення точності формування заданого силового навантаження на випробуваний об'єкт реалізується введенням третього блока порівняння, на підсумовувальний вхід якого надходить сигнал X2, а на віднімальний вхід надходить сигнал X1. На фігурі наведена структурна схема електродинамічного вібратора. Електродинамічний вібратор містить магнітопровід 1 з обмоткою 2 підмагнічування, джерело 3 3 37999 Коло зворотного зв'язку, що містить датчик 10 положення рухомої котушки 4 і платформи вібратора та блок 11 зворотного зв'язку, має функцію створення електромагнітної підвіски рухомої системи. Рухома котушка 4 знаходиться під дією електромагнітної сили, що пропорційна струму на ви ході підсилювача 9 та магнітній індукції, що створюється обмоткою 2 підмагнічування. Перший елемент 18 порівняння формує різницю напруги, що формується після проходження сигналу з виходу задавального генератора 6 першого випрямляча 14 та згладжувального фільтра 16 та напруги, що формується після проходження сигналу з виходу блоку 13 формування моделі - еталону другого випрямляча 15 та другого згладжувального фільтра 17. На виході третього суматора 20 формується сигнал Сигнал з виходу задавального генератора 6 після проходження через перший випрямляч 14 і перший згладжувальний фільтр 16 надходить на один підсумовувальний вхід першого блока 18 порівняння, на другий віднімальний вхід якого надходить сигнал в виходу блока 13 формування моделі-еталону після проходження через другий випрямляч 15 і другий згладжувальний фільтр 17. Вихідний сигнал першого блоку 18 порівняння надходить на керувальний вхід підсилювача 12 з регульованим коефіцієнтом підсилення. Сигнал з виходу др угого суматора 8 надходить на один вхід третього елемента 20 порівняння, на другий вхід якого надходить сигнал з виходу підсилювача 12 з регульованим коефіцієнтом підсилення. Вихідний сигнал третього елемента 20 порівняння через підсилювач 9 струм у надходить в обмотку рухомої котушки 4 вібратора. На виході датчика 10 положення формується сигнал, що надходить на другий вхід другого суматора 8 і забезпечує електромагнітну підвіску рухомої системи вібратора, Якщо сигнал на виході задавального генератора 6 буде vг, сигнал на виході підсилювача 12 – X2 , сигнал на виході другого суматора 8 – X1, то маємо таке співвідношення k1vг (p ) + x1( p) + x 1(p ) - x 2 (p ) = x1( p), (1) тобто k1vг (p ) = x 2 (p ) - x1(p ), де W1 1( p)Y1( p) - W2 1(p )Y2 (p ) = R( p). Електродинамічний вібратор працює таким чином. На виході задавального генератора 6 формується сигнал, пропорційний силі, щотреба передавати випробуваному об'єкту 5, установленому на платформі вібратора. Цей сигнал надходить на вхід першого суматора 7 і через другий суматор 8 на третій вхід першого суматора 7 і на другий підсумовувальний вхід другого елемента 19 порівняння, на перший віднімальний вхід якого надходить сигнал з виходу задавального генератора 6 після проходження через підсилювач 12 з регульованим коефіцієнтом підсилення. Вихідний сигнал другого елемента 19 порівняння надходить на другий вхід першого суматора 7. x1( p) = W1-1(p )Y1( p), x 2 (p ) = W2 1( p)Y2 ( p). Фіг. __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2001 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 4
ДивитисяДодаткова інформація
Назва патенту англійськоюElectrodynamic vibrator
Автори англійськоюPuz'ko Ihor Danylovych, Pavlovskyi Mykhailo Antonovych, Khvorost Volodymyr Andriiovych
Назва патенту російськоюЭлектродинамический вибратор
Автори російськоюПузько Игорь Данилович, Павловский Михаил Антонович, Хворост Владимир Андреевич
МПК / Мітки
МПК: B06B 1/02
Мітки: вібратор, електродинамічний
Код посилання
<a href="https://ua.patents.su/4-37999-elektrodinamichnijj-vibrator.html" target="_blank" rel="follow" title="База патентів України">Електродинамічний вібратор</a>
Електродинамічний вібратор
Номер патенту: 38228
Опубліковано: 15.05.2001
Автори: Хворост Володимир Андрійович, Павловський Михайло Антонович, Пузько Ігор Данилович
МПК: B06B 1/02
Мітки: вібратор, електродинамічний
Формула / Реферат:
Дата прийняття рішення 28.12.2000р.(21) 2000063371(54) (57) Електродинамічний вібратор, що містить магнітопровід з обмоткою підмагнічування, установлену в повітряному зазорі магнітопровода рухому котушку, довжина якої більше довжини повітряного зазору, задавальний регенератор, вихід якого сполучений з входом першого підсилювача, послідовно з’єднане з обмоткою рухомої котушки, і платформу, на...
Перетворювач змін частоти сигналу у фазовий зсув
Номер патенту: 36610
Опубліковано: 16.04.2001
Автор: Рапін Володимир Васильович
МПК: H03L 7/00
Мітки: частоти, змін, перетворювач, фазовий, сигналу, зсув
Текст:
...до входу др угого підсилювача з автоматичним регулюванням підсилення 7, вихід цього підсилювача з'єднаний з другими входами блоків формування сигналу синхронізації 2, 3, 4 (n+1 блок). Структурна схема блоку формування сигналу синхронізації містить послідовно з'єднані суматор 8 і підсилювач з автоматичним регулюванням підсилення 9, причому перший та другий входи суматора 8 є також першим та другим входами блоку формування сигналу...
Пристрій для визначення резонансної частоти елементів конструкції
Номер патенту: 32930
Опубліковано: 15.02.2001
Автори: Пузько Ігор Данилович, Хворост Володимир Андрійович
МПК: G01M 7/00
Мітки: частоти, елементів, визначення, пристрій, конструкції, резонансної
Текст:
...перетворювач ,блок порівняння,другий задавальний генератор гармонійних сигналів с дискретною зміною частоти,вихід якого спо лучений з входом регулятора амплітуди через третій комутатор,перший вхід якого з'єданий з виходом першого задавального генератора гармонійних сигналів ,вихід фазового детектора з'єднаний з інфор маїтійним входом четвертого комутатора ,другий вхід якого з'єднаний через другий нуль-орган з лічильним входом...
Електропривід з релейним керуванням
Номер патенту: 31224
Опубліковано: 15.12.2000
Автори: Казачковський Микола Миколайович, Савченко Сергій Борисович
МПК: H02P 7/06
Мітки: електропривід, керуванням, релейним
Текст:
...зг єднаний з виходом другого суматора, перший вхід якого підключений до виходу давача струму, другий вхід - до виходу давача напруги, третій вхід - до виходу третього блока диференціювання, п' ятнй вхід - до виходу задавача мінімальної напруги силового фільтра, вихід блока виділення модуля з' єднаний з входом третього блока диференціювання та з четвертям входом другого суматора, а ного вхід підключений до виходу третього суматора,...
Пристрій для моделювання імовірносного графа
Номер патенту: 34114
Опубліковано: 15.02.2001
Автор: Зеленков Олександр Аврамович
Мітки: імовірносного, пристрій, графа, моделювання
Текст:
...до виходу лічильника. На фіг. 1 показано блок-схему пристрою, а на фіг. 2 - приклад імовірнісного графа. Вихід першого регістра 1 з'єднаний з адресними входами відповідно першого 2, другого 3, третього 4 ПЗП і з входом формувача 5. Вихід першого ПЗП 2 з'єднаний з першим входом першої схеми порівняння 6, другий вхід якої підключено до виходу першого генератора випадкових сигналів 7, вхід якого підключений до виходу формувача 5. Перший і...
Попередній патент: Спосіб продування рідкого металу з допалюванням відхідних газів
Наступний патент: Спосіб підвищення життєздатності охолоджених сперміїв людини
Випадковий патент: Стабільний фармацевтичний препарат паклітакселю та спосіб його одержання