Електродинамічний вібратор
Номер патенту: 38228
Опубліковано: 15.05.2001
Автори: Павловський Михайло Антонович, Хворост Володимир Андрійович, Пузько Ігор Данилович
Формула / Реферат
Дата прийняття
рішення
28.12.2000р.
(21) 2000063371
(54) (57)
Електродинамічний вібратор, що містить магнітопровід з обмоткою підмагнічування, установлену в повітряному зазорі магнітопровода рухому котушку, довжина якої більше довжини повітряного зазору, задавальний регенератор, вихід якого сполучений з входом першого підсилювача, послідовно з’єднане з обмоткою рухомої котушки, і платформу, на якій установлені датчики зусилля і прискорення, при чому датчик прискорення сполучений через другий підсилювач і послідовно з’єднані перші і другі інтегратори з входом фазочутливого блока, інвертор, другий суматор, перший вхід якого сполучений з його виходом і першим входом першого суматора, другий вхід – з виходом першого підсилювача, а третій вхід через інвертор – з виходом датчика зусилля, який відрізняється тим, що, він додатково містить третій і четвертий підсилювачі, послідовно з’єднані між собою перший, другий і третій диференціювальні блоки, третій суматор, перший, другий і третій комутатори, перший, другий і третій ключі, другий датчик прискорення, фазовий детектор, порогів блок, елемент “НЕ”, генератор імпульсів і тригер, при цьому вхід першого диференціювального блока сполучений з виходом другого підсилювача, а вихід третього диференціювального блока сполучений з третім входом третього суматора, перший вхід якого сполучений з виходом першого диференціювального блока, а другий вхід – з виходом другого диференціювального блока, перший і другий виходи третього суматора сполучені з відповідними входами першого комутатора, вихід якого через перший ключ сполучений з другим входом першого суматора, вихід другого датчика прискорення, жорстко установлено на рухомій котушці, і вихід першого датчика прискорення сполучені через четвертий і третій підсилювачі відповідно з входами фазового детектора, виходом під’єднаного до входу порогового блоку, вихід якого сполучений з керувальним входом третього ключа безпосередньо, а з керувальним входом другого ключа – через елемент: “НЕ”, інформаційні входи другого і третього ключів об’єднані і сполучені з виходом генератора імпульсів, вихід другого ключа сполучений з R – входом тригера, S - вхід якого сполучений виходом третього ключа, прямий вихід тригера сполучений з керувальними виходами першого і третього комутаторів, перший, другий і третій інформаційні входи другого комутатора сполучені відповідно з виходами другого підсилювача, першого інтегратора і фазочутливого блока, перша група інформаційних першого, другого і третього виходів другого комутаторів сполучена з першою групою інформаційних першого, другого і третього входів першого суматора безпосередньо, друга група першого, другого і третього входів якого сполучена з першою групою інформаційних першого, другого і третього виходів третього комутатора, друга група інформаційних першого, другого і третього виходів якого сполучено з третьою групою інформаційних першого, другого і третього входів першого суматора, керувальний вхід другого комутатора об’єднаний з клерувальним входом першого ключа і під’єднаний до потенційної шини.
Текст
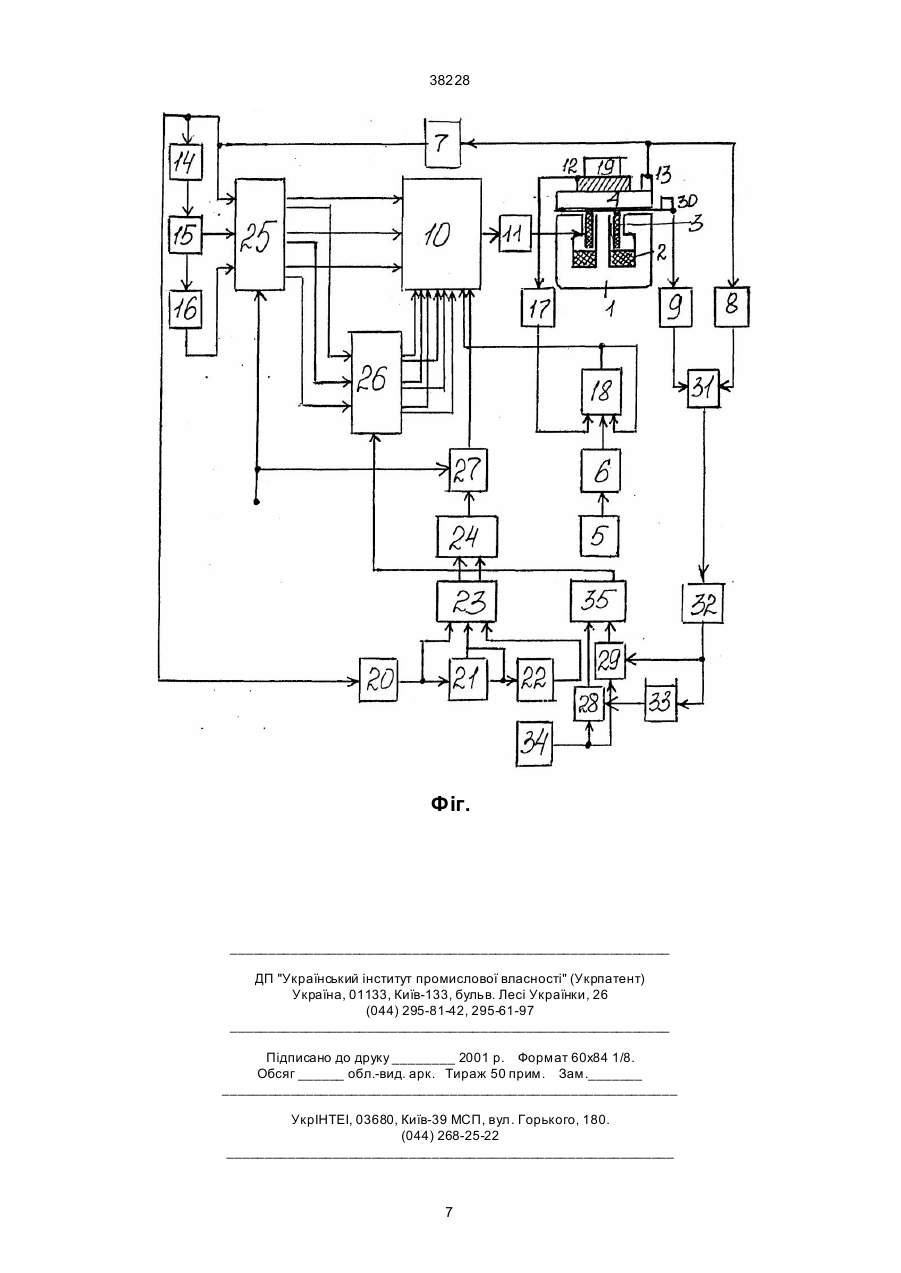
Електродинамічний вібратор, що містить магнітопровід з обмоткою підмагнічування, установлену в повітряному зазорі магнітопроводу рухому котушку, довжина якої більша довжини повітряного зазору, задавальний генератор, вихід якого сполучений з входом першого підсилювача, послідовно з'єднані перший суматор і підсилювач потужності, з'єднаний з обмоткою рухомої котушки, і платформу, на якій установлені датчики зусилля і прискорення, причому, датчик прискорення сполучений через другий підсилювач і, послідовно з'єднані перший і другий інтегратори, з входом фазочутливого блоку, інвертор, другий суматор, перший вхід якого сполучений з його виходом і першим входом першого суматора, другий вхід - з виходом першого підсилювача, а третій вхід через інвертор - з виходом датчика зусилля, який відрізняється тим, що він додатково містить третій і четвертий підсилювачі, послідовно з'єднані між собою перший, другий і третій диференціювальні блоки, третій суматор, перший, другий і третій комутатори, перший, другий і третій ключі, другий датчик прискорення, фазовий детектор, пороговий блок, елемент "НІ", генератор імпульсів і тригер, при цьому, вхід першого диференціювального блока сполучений з виходом другого підсилювача, а вихід третього диференціювального блока сполучений з третім входом третього суматора, перший вхід якого сполучений з виходом першого дифе A (54) ЕЛЕКТРОДИНАМІЧНИЙ ВІБРАТОР 38228 № 869842, М.кл. В06В 3/04, 1981). Відомий пристрій має недостатню точність, що визначається недостатньою компенсацією гнучкої, інерційної і дисипативної сил, що діють на рухому систему силозбуджувача в залежності від частотного діапазону відтворених вібрацій. Цей недолік пояснюється тим, що не враховується вигляд математичної моделі рухомої системи вібратора в залежності від діапазону частот. Найбільш близьким до запропонованого по технічній суті, результату, що досягається і прийнятому за прототип є електродинамічний вібратор, що містить магнітопровід з обмоткою підмагнічування, що установлена в повітряному зазорі магнітопроводу, рухому котушку, до вжина якої більша довжини повітряного зазору, задавальний генератор, вихід якого з'єднаний з входом першого підсилювача, послідовно сполучені перший суматор і підсилювач потужності, з'єднаний з обмоткою рухомої котушки, і платформу, на якій жорстко установлені датчики зусилля і прискорення, при цьому, датчик прискорення сполучений через другий підсилювач з першим входом першого суматора і через послідовно з'єднані другий підсилювач і перший інтегратор - з другим входом першого суматора, інвертор, другий інтегратор, другий суматор і фазочутливий блок, причому, перший вхід другого суматора сполучений з його виходом, другий вхід - з виходом першого підсилювача, а третій вхід через інвертор - з виходом датчика зусилля, причому третій вхід першого суматора сполучений, через послідовно з'єднані фазочутливий блок і другий інтегратор, з виходом першого інтегратора, а четвертий вхід - з виходом другого суматора (див. ав. св. СРСР № 1269853, М.кл. В06В 1/04, G05G 19/00, 1986). Недоліком відомого вібратора є неурахування залежності його математичної моделі, яка характеризує зміщення рухомої котушки з платформою в залежності від частотного діапазона відтворених вібрацій, що призводить до зниження точності і коефіцієнта корисної дії (ККД) електродинамічного вібратора. В основу винаходу поставлена задача удосконалення форми моделі електродинамічного вібратора за рахунок зміни моделі його передавальної функції, що дозволить з більшою точністю враховувати характер зв'язку (жорсткий або гнучкий) між платформою вібратора і рухомою котушкою в залежності від частотного діапазону. При цьому забезпечується більш високий ККД електродинамічного вібратора. Поставлена задача вирішується тим, що в електродинамічному вібраторі, який містить магнітопровід з обмоткою підмагнічування, установлену в повітряному зазорі магнітопроводу рухому котушку, довжина якої більша довжини повітряного зазору, задавальний генератор, вихід якого сполучений з входом першого підсилювача, послідовно з'єднані перший суматор і підсилювач потужності, з'єднаний з обмоткою рухомої котушки, і платформу, на якій установлені датчики зусилля і прискорення, причому датчик прискорення сполучений через другий підсилювач і послідовно з’єднані перший і другий інтегратори з входом фазочутливого блоку, інвертор, другий суматор, перший вхід якого сполучений з його виходом і пер шим входом першого суматора, другий вхід - звиходом першого підсилювача, а третій вхід через інвертор - з виходом датчика зусилля, згідно винаходу, він додатково містить третій і четвертий підсилювачі, послідовно з'єднані між собою, перший, другий і третій диференціювальні блоки, третій суматор, перший, другий і третій комутатори, перший, другий і третій ключі, друпий датчик прискорення, фазовий детектор, пороговий блок, елемент “НІ”, генератор імпульсів і тригер, при цьому, вхід першого диференціювального блоку сполучений з виходом другого підсилювача, а вихід третього диференціювального блока сполучений з третім входом третього суматора, перший вхід якого сполучений з виходом першого диференціювального блока, а другий вхід - з виходом другого ди ференціювального блоку, перший і другий виходи третього суматора сполучені з відповідними входами першого комутатора, вихід якого через перший ключ сполучений з другим входом першого суматора, вихід другого датчика прискорення, жорстко установленого на рухомій котушці, і ви хід першого датчика прискорення сполучені через четвертий і третій підсилювачі, відповідно, до входів фазового детектора, виходом під'єднаного до входу порогового блоку, ви хід якого сполучений з керувальним входом третього ключа безпосередньо, а з керувальним входом другого ключа - через елемент "НЕ", ін формаційні входи другого і третього ключів об'єднані і сполучені з виходом генератора імпульсів, вихід другого ключа сполучений з R-входом тригера, S-вхід якого сполучений з виходом третього ключа, прямий вхід трегера сполучений з керувальними входами першого і третього комутаторів, перший, другий і третій інформаційні входи другого комутатора сполучені, відповідно, з виходами другого підсилювача, першого інтегратора і фазочутливого блоку, перша група інформаційних першого, другого і третього виходів другого комутатора сполучена з першою групою інформаційних першого, другого і третього входів першого суматора безпосередньо, друга група інформаційних першого, другого і третього входів якого сполучена з першою групою інформаційних першого, другого і третього виходів третього комутатора, друга група інформаційних першого, другого і третього виходів якого сполучена з третьою групою інформаційних першого, другого і третього входів першого суматора, керувальний вхід другого комутатора об'єднаний з керувальним входом першого ключа і під'єднаний до потенційної шини. Застосування запропонованого електродинамічного вібратора у сполученні з усіма суттєвими ознаками, включаючи відмінні, дозволяє, в залежності від частотного діапазону вібрацій і фіксації характера зв'язку з'єднання - рухома котушка-платформа вібратора-випробуваний об'єкт виконувати корекцію при умові компенсації інерційної, дисипативної і гнучкої складових сил, які діють в рухомій системі вібратора, що і обусловлює збільшення ККД при відробці заданої силової дії на випробуваний об'єкт, і, окрім того, забезпечує більш високу достовірність інформації при проведенні вібровипробувань. На фіг. приведена структурна схема електродинамічного вібратора, що патентується. 2 38228 Електродинамічний вібратор містить магнітопровід 1 з обмоткою 2 підмагнічування, установлену в повітряному зазорі магнітопроводу і рухому котушку 3, .довжина якої більша довжини повітряного зазору, платформу 4, задавальний генератор 5, перший, другий, третій, четвертий підсилювачі 6, 7, 8, 9 відповідно, перший суматор 10, підсилювач 11 потужності, датчик 12 зусилля, перший датчик 13 прискорення, перший інтегратор 14, другий інтегратор 15, фазочутливий блок 16, інвертор 17, другий суматор 18, випробуваний об'єкт 19, перший, другий, третій диференціювальні блоки 20, 21, 22 відповідно, третій суматор 23, перший, другий і третій комутатори 24, 25, 26 відповідно, перший, другий, третій ключі 27, 28, 29 відповідно, другий датчик 30 прискорення, фазовий детектор 31, пороговий блок 32, елемент "НЕ" 33, генератор 34 імпульсів, тригер 35. Блоки і елементи пристрою з'єднані таким чином. Вихід задавального генератора 5 через перший підсилювач 6 сполучений з другим входом другого суматора 18, вихід якого сполучений з його першим входом. Послідовно сполучені перший суматор 10 і підсилювач 11 потужності, вихід якого з'єднаний з обмоткою рухомої котушки 3. На платформі 4 установлені датчик 12 зусилля і перший датчик 13 прискорення. Датчик 12 зусилля розташований між платформою 4 і випробуваним об'єктом 19. Вихід першого датчика 13 прискорення через другий підсилювач 7 сполучений з першим входом другого комутатора 25, перший вхід якого з'єднаний через перший інтегратор 14 з другим входом другого комутатора 25. Другий вхід другого комутатора 25 через послідовно з'єднані другий інтегратор 15 і фазочутливий блок 16 сполучений з третім входом другого комутатора 25. Перший вхід другого суматора 18 сполучений з його виходом, а третій вхід другого суматора 18 сполучений через інвертор 17 з виходом датчика 12 зусилля. Перша група інформаційних першого, другого і третього виходів другого комутатора 25 сполучена з першою групою інформаційних першого, другого і третього входів першого суматора 10. Перший датчик 13 прискорення установлений на рухомій платформі 4, а другий датчик 30 прискорення встановлений на рухомій котушці 3. Виходи першого і другого датчиків 13 і 30 прискорення через третій і четвертий підсилювачі 8, 9 відповідно сполучені з входами фазового детектора 31, вихід якого сполучений з входом порогового блока 32. Вихід порогового блока 32 сполучений з керувальним входом третього ключа 29 безпосередньо, а з керувальним входом другого ключа 28 - через елемент 33 "НЕ". Виходи третього і другого ключів 29 і 28 сполучені з S- і R- входами відповідно тригера 35. Об'’днані інформаційні входи другого і третього ключів 28 і 29 сполучені з виходом генератора 34 імпульсів. Вихід другого підсилювача 7 через послідовно з'єднані перший, другий і третій диференціювальні блоки 20, 21, 22 відповідно. сполучений з третім входом третього суматора 23, другий вхід якого сполучений з виходом другого диференціювального блоку 21, а перший вхід - з виходом першого диференціювального блоку 20. Перший і другий виходи третього суматора 23 сполучені з першим і другим вхо дами відповідно першого комутатора 24, вихід якого через перший ключ 27 сполучений з другим інформаційним входом першого суматора 10, перший інформаційний вхід якого сполучений з виходом другого суматора 18. Друга гр упа інформаційних першого, другого і третього виходів другого комутатора 25 сполучена з групою інформаційних входів третього комутатора 26. Перша група інформаційних першого, другого і третього виходів третього комутатора 26 сполучена з другою гр упою інформаційних входів першого суматора 10, третя група інформаційних першого, другого і третього виходів якого сполучена з другою групою інформаційних першого, другого і третього виходів третього комутатора 26. Керувальний вхід другого комутатора 25 сполучений з потенційною шиною. Керувальний вхід першого ключа 27 з'єднаний з потенційною шиною і сполучений з керувальним входом другого комутатора 25. Керувальні входи першого і третього комутаторів 24, 26 відповідно, об,'єднані і сполучені з прямим виходом тригера 35. При відсутності сигналу на керувальному вході другого комутатора 25 сигнали з його першого, другого і третього інформаційних входів надходять на першу груп у інформаційних входів першого суматора 10. При наявності сигналу на керувальному вході др угого комутатора 25 сигнали з його першого, другого і третього інформаційних входів надходять на групу інформаційних входів третього комутатора 26. При відсутності сигналу на керувальному вході третього комутатора 26 (тригер 35 у нульовому стані) сигнали з його першого, другого і третього інформаційних входів надходять на першу групу його виходів (з першого по третій, відповідно) і далі на другу гр упу ін формаційних входів першого суматора 10. При наявності сигналу на керувальному вході третього комутатора 26 (тригер 35 в одиничному стані) сигнали з його першого, другого і третього інформаційних входів надходять на його другу груп у інформаційних виходів і далі на третю гр упу інформаційних входів першого суматора 10. При надходженні сигналів на першу груп у інформаційних входів першого суматора 10 сигнал на його виході формується таким чином, що відповідає диференційному рівнянню другого порядку з відповідними коефіцієнтами при похідних, що в операційній формі має вигляд: (a2p2 + a1p + a 0) X(p) = F(p) (1) де a0, a1, a2 - коефіцієнти, що визначаються інерційно-жорсткими і дисипативними параметрами; Х(p) - операційне зображення переміщення платформи разом з котушкою; F(p) - операційне зображення зовнішньої силової дії. При надходженні сигналів на другу груп у інформаційних входів першого суматора 10. сигнал на його виході формується таким чином, що відповідає разом з сигналом з виходу першого комутатора 24 і першого ключа 27 диференційному рівнянню третього порядку з відповідними коефіцієнтами при похідних, що в операційній 3 38228 формі має вигляд: (a3нp3 + a2нp2 + a1нp + a0н) X(p) = F(p) і випробуваним об'єктом 19. Координата переміщення випробуваного об'єкту 19 і рухомої котушки3 з платформою 4 залежить тільки від динамічних властивостей рухомої системи вібратора, тобто маси, демпфування і жорсткості підвіски рухомої котушки 3 з платформою 4. На виході першого датчика 13 прискорення формується сигнал, пропорційний прискоренню котушки 3 з платформою 4, що надходить через другий підсилювач 7 на перший вхід другого комутатора 25. Коефіцієнт підсилення другого підсилювача 7 пропорційний масі рухомої системи вібратора. Цей сигнал далі надходить на перший вхід першої гр упи інформаційних входів першого суматора 10 і на виході цього суматора формується сигнал, пропорційний інерційній силі рухомої частини вібратора. Цей сигнал надходить через підсилювач 11 потужності в обмотку рухомої котушки 3 і формує силу, що дорівнює інерційній силі вібратора і має протилежну цій силі полярність. Тому відбувається компенсація інерційної сили в рухомій системі вібратора. Компенсація дисипативної складової сили відбувається таким чином. Вихідний сигнал другого підсилювача 7 надходить через перший інтегратор 14 на другий інформаційний вхід другого комутатора 25 і далі на другий вхід першої групи інформаційних входів першого суматора 10, а через перший суматор 10 і підсилювач 11 потужності - в обмотку рухомої котушки 3. Цей сигнал пропорційний швидкості рухомої системи вібратора і формує силу, що дорівнює дисипативній силі, що діє в рухомій системі вібратора, і має протилежну цій силі полярність. Так відбувається компенсація дисипативної сили. Компенсація гнучкої сили відбувається таким чином. Сигнал з виходу першого інтегратора 14 надходить через другий інтегратор 15 і фазочутливий блок 16 на третій вхід другого комутатора 25. На виході фазочутливого блоку 16 сигнал буде пропорційним переміщенню рухомої частини вібратора і буде мати корекцію по фазі. Пояснення такої корекції описане у аналога. Цей сигнал після проходження через другий комутатор 25 надходить на третій вхід першої групи інформаційних входів першого суматора 10. Цей сигнал пропорційний гнучкій силі, що діє в р ухомій системі вібратора, а після проходження через підсилювач 11 потужності і надходження в обмотку рухомої системи, визиває зусилля, що дорівнює гнучкій силі в рухомій частині вібратора і має протилежну цій силі полярність. Сигнал з виходу другого суматора 18, що дорівнює силі R- реакції з виходу першого датчика 12 зусилля, надходить на перший інформаційний вхід першого суматора 10 і далі через підсилювач 11 потужності - в обмотку рухомої котушки 3 і визиває зусилля, яке дорівнює силі реакції R. Таким чином, після компенсації інерційної, дисипативної і гнучкої частин сил, що діють в р ухомій системі вібратора, сигнал на виході підсилювача 11 потужності (в обмотці рухомої котушки 3) буде дорівнювати силі реакції R. Змінюючи сигнал на виході задавального генератора 5, можна змінювати силу реакції R, що (2) де а0н, а1н, а2н, а3н - коефіцієнти, що залежать від інерційно-жорстких, дисипативних параметрів механічної частини рухомої системи, індуктивності і опору обмотки рухомої котушки. При надходженні сигналів на третю групу інформаційних входів першого суматора 10 сигнал на його виході формується таким чином, що відповідає разом з сигналами з виходів другого і третього суматорів 18 і 23 диференційному рівнянню п'ятого порядку з відповідними коефіцієнтами при похідних, що в операційній формі має вигляд: (а5вр5+а4вр4+а3вр 3+а2вр2+а1вр+а0в)X(p)=F(p) (3) де а0в, а1в, а2в, а3в, а4в, а5в - коефіцієнти, що залежать від інерційно-жорстких, дисипативних параметрів механічної частини рухомої системи, індуктивності і опору обмотки рухомої котушки. Пристрій працює наступним чином. Розглянемо режими роботи пристрою в залежності від прийнятої математичної моделі, а саме режими А, В, С. Режим А. В цьому режимі на керувальному вході першого ключа 27 нульовий сигнал. Тому цей ключ розімкнутий і на другий інформаційний вхід першого суматора 10 надходить нульовий сигнал. Задавальний генератор 5 гармонійних сигналів працює в стаціонарному режимі. На виході задавального генератора 5 формується гармонійний сигнал, що подається через перший підсилювач 6 на другий вхід другого суматора 18, з виходу якого сигнал подається на його перший вхід і на перший вхід першого суматора 10. Через перший суматор 10 і підсилювач потужності 11 цей сигнал надходить в обмотку рухомої котушки 3. Тим самим формується сигнал, що відтворює зусилля на рухому платформу 4 і випробовуваний об'єкт 19. Рухома котушка 3, платформа 4 і випробуваний об'єкт 19 рухаються по закону, що задається задавальним генератором 5. При цьому виникає сила R реакції системи платформа 4 - випробуваний об'єкт 19, що фіксується датчиком 12 зусилля, сигнал з виходу якого надходить через інвертор 17 на третій вхід другого суматора 16, на перший вхід якого надходить його вихідний сигнал. Таким чином, на виході другого суматора 18 сигнал U18 дорівнює співвідношенню: U18 = U18 – U17 + U 6 (4) U17 = U6 (5) або де U17 -сигнал на виході інвертора 17; U6 - сигнал на виході першого підсилювача 6. Співвідношення (4) стверджує той факт, що підсилений сигнал з виходу задавального генератора 5 дорівнює сигналу U17, що визначає силу реакції R, яка виникає між рухомою платформою 4 4 38228 має місце між платформою 4 і випробуваним об'єктом 19. Режим В. В цьому режимі на керувальний вхід першого ключа 27 надходить сигнал, що дорівнює одиниці. Тому перший ключ 27 буде замкнутим. На керувальний вхід другого комутатора 25 також подається сигнал, що дорівнює одиниці. Тому вхідні сигнали другого комутатора 25 надходять на другу гр упу його інформаційних виходів (з першого по третій), тобто на групу інформаційних входів третього комутатора 26. Якщо на виході фазового детектора 31 має місце нерівність UФД < Uпор, де UФД - рівень сигналу на виході фазового детектора 31, a Uпop - рівень сигналу, на який реагує пороговий блок 32, то маємо реалізацію математичної моделі вібратора, що відповідає області нижніх частот. Для області нижніх частот динамічний режим вібратора описується диференційним рівнянням третього порядку (див. Божко А.Е. Воспроизведение вибраций. К.: Наукова думка. - 1975. - С.7597), а саме, в операційній формі без урахування сили реакції R маємо: (а3нр3+а2нр2+а 1нр+а0н)Х(р)=F(p) І(р) = kпU10(p) де kп - коефіцієнт перетворення підсилювача 11 потужності, а вираз для визначення силової дії F(p) має вигляд: F(p) = BlI(p) = kFU10(p) а3н = â3н, а 2н = â2н , а1н = â1н, а0н = â0н (12) має місце співвідношення: k1Uг = R a при урахуванні сили R(p) реакції між рухомою платформою 4 і випробуваним об’єктом 19 має вигляд: (а5вр5+а4вр4+а3вр 3+а2вр2+а1вр+а0в)Х(р)+R(p)=F(p) (15) де а0в, а1в, а2в, а3в, а4в, а5в - коефіцієнти, що залежать від параметрів вібратора. При умові UФД < Uпор, на ви ході порогового блока 32 формується сигнал, який надходить на керувальний вхід третього ключа 29, замикаючи його. На S-вхід тригера 35 надходять імпульси з виходу генератора 34 імпульсів, установлюючи тригер 35 в одиницю. Тим самим на керувальні входи першого і третього комутаторів 24, 26 відповідно, надходять сигнали одиничного рівня. На інформаційні входи третьої групи входів першого суматора 10 надходять сигнали з другої гр упи інформаційних виходів третього комутатора 26, на перший інформаційний вхід першого суматора 10 надходить сигнал з виходу другого суматора 18, на другий інформаційний вхід першого суматора 10 надходить сигнал з другого виходу третього суматора 23 після проходження через перший комутатор 24 і перший ключ 27. На входах третьої гр упи інформаційних входів першого суматора 10 формується сигнал, що має вигляд: (8) k1Uг(р)=UR(p) (а5вр5+а4вр4+а3вр 3+а2вр2+а1вр+а0в)Х(р)=F(p) (14) (7) U18(p) = k1Uг(p)+U18(p)-UR(p) (13) тобто, для такої математичної моделі вібратора сигнал на виході задавального генератора 5 пропорційний силі R реакції між платформою 4 рухомої системи вібратора і випробуваним об’єктом 19. Режим С. В цьому режимі на керувальному вході другого комутатора 25 є сигнал, що дорівнює одиниці, на керувальному вході першого ключа 27 також одиничний сигнал. Якщо має місце нерівність UФД < Uпор, то повинна бути реалізована математична модель вібратора, що є характерною для області високих частот. Як відомо, в області високих частот режим роботи вібратора може бути відображений диференційним рівнянням п'ятого порядку, що в операційній формі має вигляд: де, - а0н, а1н, а2н, а3н - коефіцієнти, що залежать від інерційно-жорстких, дисипативних параметрів механічної системи вібратора, індуктивності і опору котушки 3; Х(р) - операційне зображення переміщення платформи 4 разом з випробуваним об'єктом 19; F(р) - операційне зображення зовнішньої силової дії. Якщо UФД < Uпор на виході порогового блоку 32 сигнал відсутній (дорівнює нулю), тому третій ключ 29 розімкнений, а другий ключ 28 замкнений тоді як на виході елемента 33 "НІ" присутній ненульовий сигнал (одиничний сигнал). Імпульси з виходу генератора 34 імпульсів надходять на R-вхід тригера 35, через другий ключ 28, установлюючи його в нульовий стан. Таким чином, на виході першого суматора 10 формується сигнал U10, який в операційній формі має вигляд: (9) де або (11) де kF = Blkп і, приймаючи до уваги співвідношення (7), (8), (9), можно стверджувати, що при виконанні умов: (6) U10(p)=(â3нр3+â2нр 2+â1нр+â0)Х(р)+U18(p) (10) Uг(р) - операційне зображення сигналу на виході задавального генератора 5 ; k1 - коефіцієнт підсилення першого підсилювача 6; UR(p) - операційне зображення сигналу на виході датчика 12 зусилля; U18(р) - операційне зображення сигналу на виході другого суматора 18. Приймаючи до уваги співвідношення (7) і співвідношення (6) при урахуванні сили реакції R, а саме, а3нр3+а2нр2+а1нр+а0н)Х(р)=F(р), і, приймаючи до уваги, що операційне зображення струму І(р) на виході підсилювача 11 потужності пропорційно його вхідній напрузі, а саме: 5 38228 â2вр2+â1вр+â0в (16) перший інформаційний вхід першого суматора 10 надходить сигнал з виходу др угого суматора 18. В цьому режимі перший ключ 27 замкнений, тому ви хідний сигнал першого комутатора 24 надходить на другий інформаційний вхід першого суматора 10. В цьому режимі сигнал з виходу другого підсилювача 7 надходить на третій вхід третього суматора 23 через послідовно з'єднані перший, другий і третій диференціювальні блоки 20, 21, 22 відповідно, на другий і перший входи третього суматора 23 - з виходів другого і першого диференціювальних блоків 21, 20 відповідно. При наявності на керувальному вході першого комутатора 24 нульового сигналу (тригер 35 в нульовому стані) на його вихід надходить сигнал з першого входу, на який надходить сигнал тільки з першого входу третього суматора 23 з відповідним вісовим коефіцієнтом. Приймаючи до уваги (15) і (18) можна стверджувати, що при виконанні умов: де â0в, â1в, â2в - коефіцієнти підсумовування першого суматора 10 по відповідних входах. На першому інформаційному вході першого суматора 10 формується сигнал, що дорівнює величині U18. На другому інформаційному вході першого суматора 10 формується сигнал, що дорівнює: â5вр5+â4вр4+â3вр 3 (17) â3в, â4в, â5в - коефіцієнти підсумовування третього суматора 23 по відповідних входа х. Таким чином, на виході першого суматора 10 формується сигнал, що дорівнює: U10(p)=(â5вр5+â4вр4+â3вр3+â2вр2+â1вр+â0в)Х(р) +U18(p) (18) де U18(p)=U18(p)+k1Uг(р)-UR(p) (19) k1Uг(р)=UR(p) (20) а5в=â5в, а 4в=â4в , а3в=â3в, а2в=â2в, а1в=â1в, а0в=â0в (21) або має місце співвідношення: В цьому режимі на керувальному вході другого комутатора 25 присутній сигнал, що дорівнює одиниці. Тому вхідні сигнали цього комутатора надходять на другу груп у інформаційних виходів і, далі, на групу інформаційних входів третього комутатора 26. Тригер 35 знаходиться в одиничному стані, тому на керувальному вході третього комутатора 26 присутній одиничний сигнал, а вхідні інформаційні сигнали надходять на другу гр уп у його інформаційних виходів і далі на третю групу інформаційних входів першого суматора 10. Окрім того, в цьому режимі, як і раніше в режимі "А" на k1Uг=UR (22) тобто сигнал на виході задавального генератора 5 пропорційний силі R реакції між платформою рухомої системи вібратора і випробуваним об'єктом. Запропонований електродинамічний вібратор має перевагу, а саме, більш високий ККД, за рахунок більш точного урахування характеру зв'язку (жорсткий або гнучкий) рухомої системи: рухома котушка - платформа вібратора – випробуваний об’єкт). 6 38228 Фіг. __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2001 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 7
ДивитисяДодаткова інформація
Назва патенту англійськоюElectrodynamic vibration generator
Автори англійськоюPuz'ko Ihor Danylovych, Pavlovskyi Mykhailo Antonovych, Khvorost Volodymyr Andriiovych
Назва патенту російськоюЭлектродинамический вибратор
Автори російськоюПузько Игорь Данилович, Павловский Михаил Антонович, Хворост Владимир Андреевич
МПК / Мітки
МПК: B06B 1/02
Мітки: вібратор, електродинамічний
Код посилання
<a href="https://ua.patents.su/7-38228-elektrodinamichnijj-vibrator.html" target="_blank" rel="follow" title="База патентів України">Електродинамічний вібратор</a>
Пристрій для множення
Номер патенту: 37026
Опубліковано: 16.04.2001
Автори: Кіров Максим Володимирович, Білан Степан Миколайович
МПК: G06G 7/16
Текст:
...схеми керування, другий вихід котрої підключений до другого керуючого входу першого суматора та до другого керуючого входу др угого суматора, а третій вихід схеми керу вання підключений до першого керуючого входу першого суматора та до першого керуючого входу другого суматора, а інформаційній вихід лічильника підключений до першого та другого інформаційного входів першого суматора та до першого та другого інформаційних входів др угого...
Пристрій для визначення резонансної частоти елементів конструкції
Номер патенту: 32930
Опубліковано: 15.02.2001
Автори: Хворост Володимир Андрійович, Пузько Ігор Данилович
МПК: G01M 7/00
Мітки: конструкції, елементів, пристрій, резонансної, частоти, визначення
Текст:
...перетворювач ,блок порівняння,другий задавальний генератор гармонійних сигналів с дискретною зміною частоти,вихід якого спо лучений з входом регулятора амплітуди через третій комутатор,перший вхід якого з'єданий з виходом першого задавального генератора гармонійних сигналів ,вихід фазового детектора з'єднаний з інфор маїтійним входом четвертого комутатора ,другий вхід якого з'єднаний через другий нуль-орган з лічильним входом...
Електропривід з релейним керуванням
Номер патенту: 31224
Опубліковано: 15.12.2000
Автори: Савченко Сергій Борисович, Казачковський Микола Миколайович
МПК: H02P 7/06
Мітки: релейним, електропривід, керуванням
Текст:
...зг єднаний з виходом другого суматора, перший вхід якого підключений до виходу давача струму, другий вхід - до виходу давача напруги, третій вхід - до виходу третього блока диференціювання, п' ятнй вхід - до виходу задавача мінімальної напруги силового фільтра, вихід блока виділення модуля з' єднаний з входом третього блока диференціювання та з четвертям входом другого суматора, а ного вхід підключений до виходу третього суматора,...
Вимірювач потужності, повного, активного та реактивного опорів
Номер патенту: 36685
Опубліковано: 16.04.2001
Автори: Зеленков Олександр Аврамович, Пазюк Олексій Вячеславович, Соченко Петро Степанович
МПК: G01R 27/02, G01R 27/16
Мітки: повного, потужності, опорів, активного, реактивного, вимірювач
Формула / Реферат:
Вимірювач потужності, повного, активного та реактивного опорів який містить послідовно з'єднані навантаження та еталонний резистор, перший, другий та третій квадратори, суматор, перший, другий та третій перетворювачі, перший та другий блоки множення, перший блок ділення та реєстратор, причому перший вивід навантаження з'єднаний з шиною живлення і першим входом першого квадратора, другий вхід якого з'єднаний з першим входом третього квадратора...
Перетворювач фаза-код
Номер патенту: 18766
Опубліковано: 25.12.1997
Автори: Дудикевич Валерій Богданович, Отенко Віктор Іванович, Максимович Володимир Миколайович, Горбатюк Станислав Миколайович, Юриш Сергій Юрійович, Суп'ян Веніамін Яковлевич
МПК: G01R 25/00
Мітки: фаза-код, перетворювач
Формула / Реферат:
Перетворювач фаза-код, що містить два вхідні формувачі, генератор тактових імпульсів, блок керування, схему віднімання, два лічильники, два комбінаційних елементи І-АБО, керуючі входи першого комбінаційного елемента І-АБО підключені до розрядів першого лічильника, сигнальні до розрядів другого лічильника, керуючі входи другого комбінаційного елемента І-АБО підключені до розрядів другого лічильника, Сигнальні - до розрядів першого лічильника,...
Попередній патент: Фільтруюча напівмаска
Наступний патент: Дорожньобудівельна машина
Випадковий патент: Фармацевтична композиція для лікування гіперліпопротеїнемії і атеросклерозу