Лінійний електропривод
Номер патенту: 43207
Опубліковано: 10.08.2009
Автори: Смірнов Юрій Йосипович, Чернишов Сергій Іванович, Попков Володимир Сергійович, Барабаш В'ячеслав Андрійович, Богаєнко Микола Володимирович


Формула / Реферат
Лінійний електропривод, що має нерухому частину, яка складається зі струмового шару, обхопленого зовнішнім магнітопроводом, встановлених в корпусі, і рухому, змонтовану всередині нерухомої частини з можливістю зворотно-поступального руху, з вузлами фіксації крайніх положень, нерухомі елементи яких змонтовані на торцях корпусу, а рухомі - на рухомій частині, який відрізняється тим, що між зовнішнім магнітопроводом і корпусом встановлено постійний магніт з радіальним намагнічуванням, нерухомі елементи виконані в вигляді фігурної поверхні по формі зрізаного конуса і направлені зрізами конусів від центра корпуса, рухомі елементи розміщені в просторах між торцями зовнішнього магнітопроводу і нерухомими елементами, виконані у вигляді фігурних шайб по формі зрізаного конуса, направлені основами конусів в бік торцевих частин зовнішнього магнітопроводу, при цьому кути конусів нерухомих і рухомих елементів рівні між собою, а відстань між фігурними шайбами більша від довжини зовнішнього магнітопроводу по торцях на величину ходу.
Текст
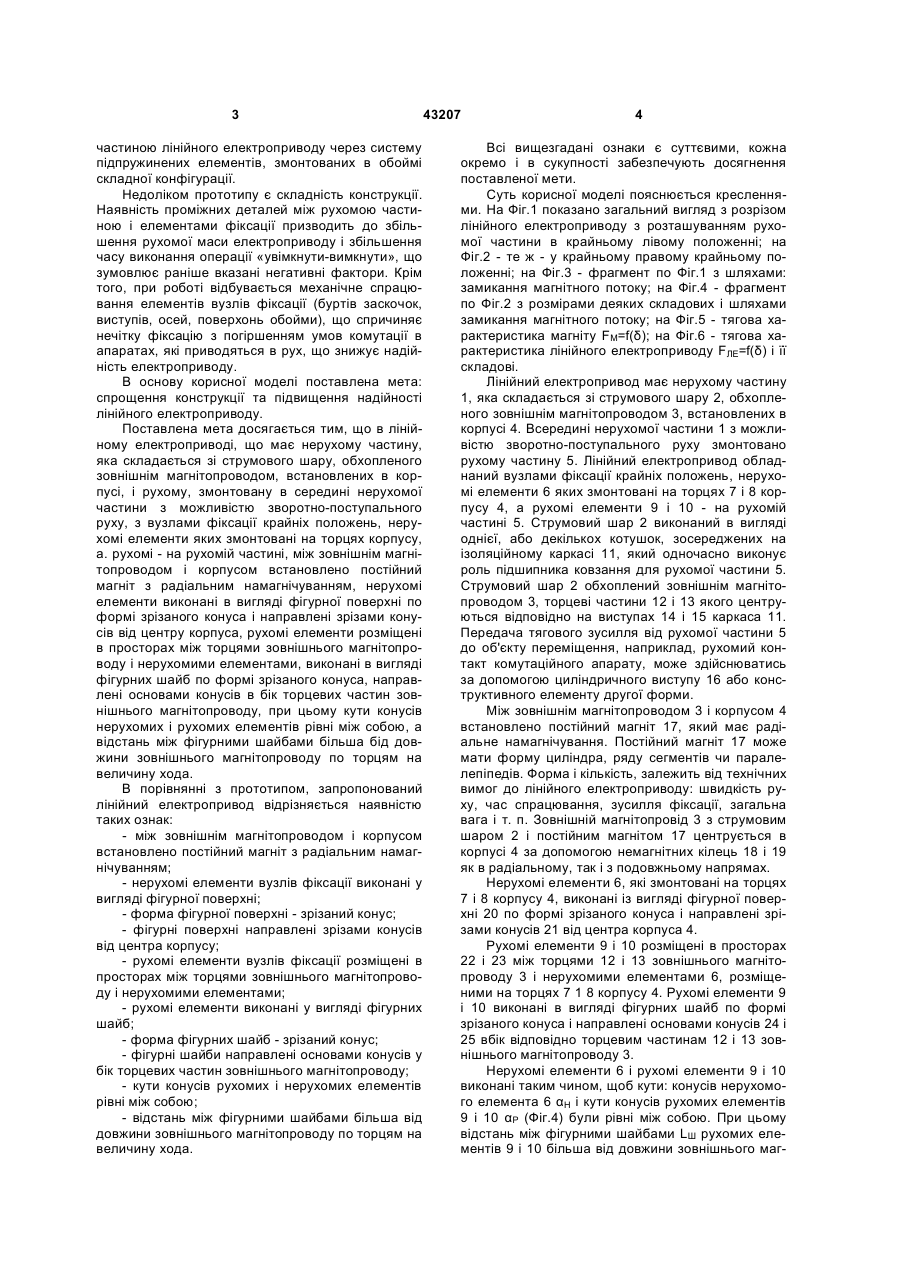
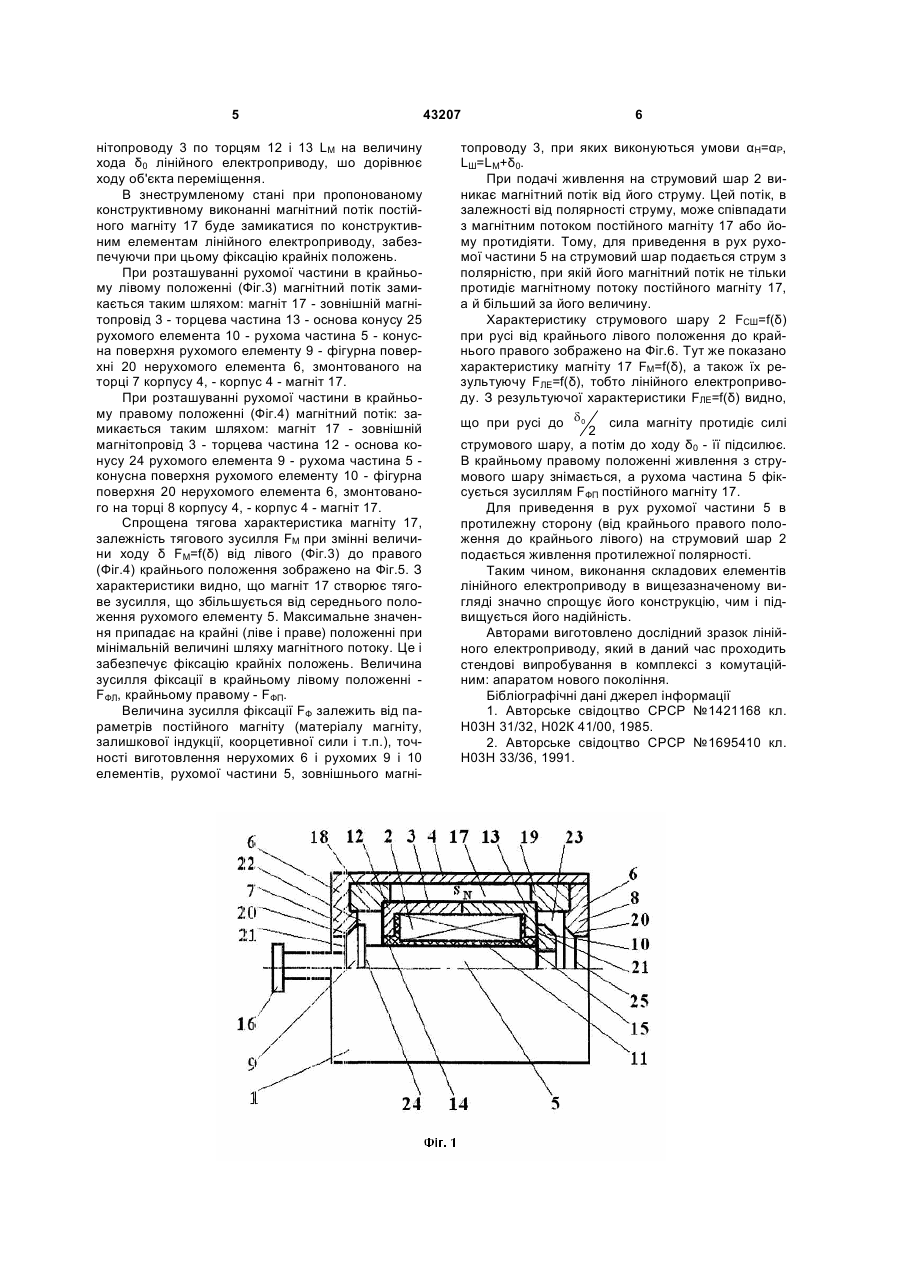
Лінійний електропривод, що має нерухому частину, яка складається зі струмового шару, обхопленого зовнішнім магнітопроводом, встановлених в корпусі, і рухому, змонтовану всередині нерухомої частини з можливістю зворотнопоступального руху, з вузлами фіксації крайніх положень, нерухомі елементи яких змонтовані на 3 частиною лінійного електроприводу через систему підпружинених елементів, змонтованих в обоймі складної конфігурації. Недоліком прототипу є складність конструкції. Наявність проміжних деталей між рухомою частиною і елементами фіксації призводить до збільшення рухомої маси електроприводу і збільшення часу виконання операції «увімкнути-вимкнути», що зумовлює раніше вказані негативні фактори. Крім того, при роботі відбувається механічне спрацювання елементів вузлів фіксації (буртів заскочок, виступів, осей, поверхонь обойми), що спричиняє нечітку фіксацію з погіршенням умов комутації в апаратах, які приводяться в рух, що знижує надійність електроприводу. В основу корисної моделі поставлена мета: спрощення конструкції та підвищення надійності лінійного електроприводу. Поставлена мета досягається тим, що в лінійному електроприводі, що має нерухому частину, яка складається зі струмового шару, обхопленого зовнішнім магнітопроводом, встановлених в корпусі, і рухому, змонтовану в середині нерухомої частини з можливістю зворотно-поступального руху, з вузлами фіксації крайніх положень, нерухомі елементи яких змонтовані на торцях корпусу, а. рухомі - на рухомій частині, між зовнішнім магнітопроводом і корпусом встановлено постійний магніт з радіальним намагнічуванням, нерухомі елементи виконані в вигляді фігурної поверхні по формі зрізаного конуса і направлені зрізами конусів від центру корпуса, рухомі елементи розміщені в просторах між торцями зовнішнього магнітопроводу і нерухомими елементами, виконані в вигляді фігурних шайб по формі зрізаного конуса, направлені основами конусів в бік торцевих частин зовнішнього магнітопроводу, при цьому кути конусів нерухомих і рухомих елементів рівні між собою, а відстань між фігурними шайбами більша бід довжини зовнішнього магнітопроводу по торцям на величину хода. В порівнянні з прототипом, запропонований лінійний електропривод відрізняється наявністю таких ознак: - між зовнішнім магнітопроводом і корпусом встановлено постійний магніт з радіальним намагнічуванням; - нерухомі елементи вузлів фіксації виконані у вигляді фігурної поверхні; - форма фігурної поверхні - зрізаний конус; - фігурні поверхні направлені зрізами конусів від центра корпусу; - рухомі елементи вузлів фіксації розміщені в просторах між торцями зовнішнього магнітопроводу і нерухомими елементами; - рухомі елементи виконані у вигляді фігурних шайб; - форма фігурних шайб - зрізаний конус; - фігурні шайби направлені основами конусів у бік торцевих частин зовнішнього магнітопроводу; - кути конусів рухомих і нерухомих елементів рівні між собою; - відстань між фігурними шайбами більша від довжини зовнішнього магнітопроводу по торцям на величину хода. 43207 4 Всі вищезгадані ознаки є суттєвими, кожна окремо і в сукупності забезпечують досягнення поставленої мети. Суть корисної моделі пояснюється кресленнями. На Фіг.1 показано загальний вигляд з розрізом лінійного електроприводу з розташуванням рухомої частини в крайньому лівому положенні; на Фіг.2 - те ж - у крайньому правому крайньому положенні; на Фіг.3 - фрагмент по Фіг.1 з шляхами: замикання магнітного потоку; на Фіг.4 - фрагмент по Фіг.2 з розмірами деяких складових і шляхами замикання магнітного потоку; на Фіг.5 - тягова характеристика магніту FМ=f(δ); на Фіг.6 - тягова характеристика лінійного електроприводу FЛЕ=f(δ) і її складові. Лінійний електропривод має нерухому частину 1, яка складається зі струмового шару 2, обхопленого зовнішнім магнітопроводом 3, встановлених в корпусі 4. Всередині нерухомої частини 1 з можливістю зворотно-поступального руху змонтовано рухому частину 5. Лінійний електропривод обладнаний вузлами фіксації крайніх положень, нерухомі елементи 6 яких змонтовані на торцях 7 і 8 корпусу 4, а рухомі елементи 9 і 10 - на рухомій частині 5. Струмовий шар 2 виконаний в вигляді однієї, або декількох котушок, зосереджених на ізоляційному каркасі 11, який одночасно виконує роль підшипника ковзання для рухомої частини 5. Струмовий шар 2 обхоплений зовнішнім магнітопроводом 3, торцеві частини 12 і 13 якого центруються відповідно на виступах 14 і 15 каркаса 11. Передача тягового зусилля від рухомої частини 5 до об'єкту переміщення, наприклад, рухомий контакт комутаційного апарату, може здійснюватись за допомогою циліндричного виступу 16 або конструктивного елементу другої форми. Між зовнішнім магнітопроводом 3 і корпусом 4 встановлено постійний магніт 17, який має радіальне намагнічування. Постійний магніт 17 може мати форму циліндра, ряду сегментів чи паралелепіпедів. Форма і кількість, залежить від технічних вимог до лінійного електроприводу: швидкість руху, час спрацювання, зусилля фіксації, загальна вага і т. п. Зовнішній магнітопровід 3 з струмовим шаром 2 і постійним магнітом 17 центрується в корпусі 4 за допомогою немагнітних кілець 18 і 19 як в радіальному, так і з подовжньому напрямах. Нерухомі елементи 6, які змонтовані на торцях 7 і 8 корпусу 4, виконані із вигляді фігурної поверхні 20 по формі зрізаного конуса і направлені зрізами конусів 21 від центра корпуса 4. Рухомі елементи 9 і 10 розміщені в просторах 22 і 23 між торцями 12 і 13 зовнішнього магнітопроводу 3 і нерухомими елементами 6, розміщеними на торцях 7 1 8 корпусу 4. Рухомі елементи 9 і 10 виконані в вигляді фігурних шайб по формі зрізаного конуса і направлені основами конусів 24 і 25 вбік відповідно торцевим частинам 12 і 13 зовнішнього магнітопроводу 3. Нерухомі елементи 6 і рухомі елементи 9 і 10 виконані таким чином, щоб кути: конусів нерухомого елемента 6 αH і кути конусів рухомих елементів 9 і 10 αР (Фіг.4) були рівні між собою. При цьому відстань між фігурними шайбами LШ рухомих елементів 9 і 10 більша від довжини зовнішнього маг 5 нітопроводу 3 по торцям 12 і 13 LМ на величину хода δ0 лінійного електроприводу, шо дорівнює ходу об'єкта переміщення. В знеструмленому стані при пропонованому конструктивному виконанні магнітний потік постійного магніту 17 буде замикатися по конструктивним елементам лінійного електроприводу, забезпечуючи при цьому фіксацію крайніх положень. При розташуванні рухомої частини в крайньому лівому положенні (Фіг.3) магнітний потік замикається таким шляхом: магніт 17 - зовнішній магнітопровід 3 - торцева частина 13 - основа конусу 25 рухомого елемента 10 - рухома частина 5 - конусна поверхня рухомого елементу 9 - фігурна поверхні 20 нерухомого елемента 6, змонтованого на торці 7 корпусу 4, - корпус 4 - магніт 17. При розташуванні рухомої частини в крайньому правому положенні (Фіг.4) магнітний потік: замикається таким шляхом: магніт 17 - зовнішній магнітопровід 3 - торцева частина 12 - основа конусу 24 рухомого елемента 9 - рухома частина 5 конусна поверхня рухомого елементу 10 - фігурна поверхня 20 нерухомого елемента 6, змонтованого на торці 8 корпусу 4, - корпус 4 - магніт 17. Спрощена тягова характеристика магніту 17, залежність тягового зусилля FM при змінні величини ходу δ FМ=f(δ) від лівого (Фіг.3) до правого (Фіг.4) крайнього положення зображено на Фіг.5. З характеристики видно, що магніт 17 створює тягове зусилля, що збільшується від середнього положення рухомого елементу 5. Максимальне значення припадає на крайні (ліве і праве) положенні при мінімальній величині шляху магнітного потоку. Це і забезпечує фіксацію крайніх положень. Величина зусилля фіксації в крайньому лівому положенні FФЛ, крайньому правому - FФП. Величина зусилля фіксації FФ залежить від параметрів постійного магніту (матеріалу магніту, залишкової індукції, коорцетивної сили і т.п.), точності виготовлення нерухомих 6 і рухомих 9 і 10 елементів, рухомої частини 5, зовнішнього магні 43207 6 топроводу 3, при яких виконуються умови αH= αР, LШ=LМ+δ0. При подачі живлення на струмовий шар 2 виникає магнітний потік від його струму. Цей потік, в залежності від полярності струму, може співпадати з магнітним потоком постійного магніту 17 або йому протидіяти. Тому, для приведення в рух рухомої частини 5 на струмовий шар подається струм з полярністю, при якій його магнітний потік не тільки протидіє магнітному потоку постійного магніту 17, а й більший за його величину. Характеристику струмового шару 2 FCШ=f(δ) при русі від крайнього лівого положення до крайнього правого зображено на Фіг.6. Тут же показано характеристику магніту 17 FМ=f(δ), а також їх результуючу FЛЕ=f(δ), тобто лінійного електроприводу. З результуючої характеристики FЛЕ=f(δ) видно, що при русі до d 0 сила магніту протидіє силі 2 струмового шару, а потім до ходу δ0 - її підсилює. В крайньому правому положенні живлення з струмового шару знімається, а рухома частина 5 фіксується зусиллям FФП постійного магніту 17. Для приведення в рух рухомої частини 5 в протилежну сторону (від крайнього правого положення до крайнього лівого) на струмовий шар 2 подається живлення протилежної полярності. Таким чином, виконання складових елементів лінійного електроприводу в вищезазначеному вигляді значно спрощує його конструкцію, чим і підвищується його надійність. Авторами виготовлено дослідний зразок лінійного електроприводу, який в даний час проходить стендові випробування в комплексі з комутаційним: апаратом нового покоління. Бібліографічні дані джерел інформації 1. Авторське свідоцтво СРСР №1421168 кл. Н03Н 31/32, Н02К 41/00, 1985. 2. Авторське свідоцтво СРСР №1695410 кл. Н03Н 33/36, 1991. 7 43207 8 9 Комп’ютерна верстка А. Крулевський 43207 Підписне 10 Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюLinear electric drive
Автори англійськоюBarabash Viacheslav Andriiovych, Bohaienko Mykola Volodymyrovych, Popkov Volodymyr Serhiiovych, Smirnov Yurii Yosypovych, Chernyshov Serhii Ivanovych
Назва патенту російськоюЛинейный электропривод
Автори російськоюБарабаш Вячеслав Андреевич, Богаенко Николай Владимирович, Попков Владимир Сергеевич, Смирнов Юрий Иосифович, Чернышев Сергей Иванович
МПК / Мітки
МПК: H02K 41/00, B25J 9/12, H01H 31/00
Мітки: електропривод, лінійний
Код посилання
<a href="https://ua.patents.su/5-43207-linijjnijj-elektroprivod.html" target="_blank" rel="follow" title="База патентів України">Лінійний електропривод</a>
Магнітоелектричний лінійний генератор
Номер патенту: 41883
Опубліковано: 10.06.2009
Автори: Гребеніков Віктор Володимирович, Петренко Андрій Володимирович
МПК: H02K 35/00
Мітки: генератор, магнітоелектричний, лінійний
Формула / Реферат:
Магнітоелектричний лінійний генератор, що містить рухомий циліндричний елемент, який складається із немагнітного стержня, феромагнітних елементів, постійних магнітів, а також статора з обмотками керування, що утворюють трифазну систему (А-Х, B-Y, C-Z), три фази якої розміщені в одному замкненому контурі, а кожна із фаз генератора складається із чотирьох обмоток керування, з'єднаних послідовно, який відрізняється тим, що кожна фаза розміщена...
Лінійний електродвигун зворотно-поступального руху
Номер патенту: 79418
Опубліковано: 11.06.2007
Автори: Богаєнко Микола Володимирович, Попков Володимир Сергійович, Голенков Геннадій Михайлович, Голуб Володимир Павлович, Павленко Петро Володимирович
МПК: H02K 33/00
Мітки: руху, лінійний, електродвигун, зворотно-поступального
Формула / Реферат:
Лінійний електродвигун зворотно-поступального руху, який має первинний елемент, виконаний у вигляді ряду котушок, і магнітопровід, які розміщені в корпусі, рухомий елемент, розташований всередині первинного елементу, пружні елементи, які зв'язують первинний і рухомий елементи, який відрізняється тим, що суміжні котушки, встановлені в магнітопровід, мають протилежний напрям струму, магнітопровід виконаний у вигляді навитого поверх котушок шару...
Лінійний індукційний прискорювач
Номер патенту: 64208
Опубліковано: 15.06.2005
Автори: Корнілов Євген Олександрович, Ложкін Руслан Сергіович, Гурин Анатолій Григорович, Гладченко Валентин Яковлевич, Алдакімов Олексій Сергіович
МПК: H05H 11/00, H05H 9/00
Мітки: лінійний, прискорювач, індукційний
Формула / Реферат:
1. Лінійний індукційний прискорювач, що містить корпус, інжектор електронів, прискорюючу магнітну систему, прискорюючу трубку з ізолятором, який відрізняється тим, що його магнітна система розташована всередині корпуса та має співвісні кільцеві одиночні магнітопроводи, які розташовані вздовж осі магнітної системи та зібрані у єдину конструкцію і розміщені у магнітному полі первинного витка, при цьому внутрішнє кільце співвісного кільцевого...
Лінійний електродвигун

Номер патенту: 45039
Опубліковано: 15.03.2002
Автори: Пермінов Юрій Микитович, Лічман Владислав Дмитрович, Абідов Султан Турсунович, Будьонний Володимир Федорович
МПК: F01B 17/00
Мітки: електродвигун, лінійний
Формула / Реферат:
Лінійний електричний двигун, що містить постійні магніти, намагнічені в радіальному напрямку котушки збудження, який відрізняється тим, що магніти розташовані на рухомій частині, а котушки збудження на нерухомій частині, причому співвідношення розмірів котушок і магнітів в напрямку переміщення та співвідношення висоти магнітів і товщини котушок в напрямку потоку в робочому проміжку такі, що забезпечують пропорційність зусилля від струму в...
Диференційний лінійний електропривід
Номер патенту: 83521
Опубліковано: 25.07.2008
Автори: Булгар Віктор Васильович, Яковлєв Олександр Володимирович, Івлєв Анатолій Дмитрович
МПК: H02K 41/035, H02K 41/02
Мітки: диференційний, лінійний, електропривід
Формула / Реферат:
Диференційний лінійний електропривід, що містить два електродвигуни постійного струму індукторного типу, які сполучені спільним валом, при цьому вторинна частина першого електродвигуна жорстко сполучена з валом, а вторинна частина другого електродвигуна сполучена з валом за допомогою передачі гвинт-гайка або шарикогвинтової пари, або магнітного гвинта.
Попередній патент: Склад для друкування пігментами текстильних матеріалів із поліефірних волокон
Наступний патент: Трансформатор потенційної енергії потоку у теплову енергію
Випадковий патент: Спосіб виготовлення накладної кишені з потрійним входом