Пристрій для моделювання нейрона
Номер патенту: 43371
Опубліковано: 10.08.2009
Автори: Тимченко Леонід Іванович, Оначенко Марат Сергійович, Колісник Петро Федорович, Мартинюк Тетяна Борисівна
Формула / Реферат
Пристрій для моделювання нейрона, який містить послідовні ланки у вигляді формувачів вхідних сигналів, перетворювачів частоти в напругу і блоків задання вагових коефіцієнтів, гальмуючі і збуджуючі входи пристрою з'єднані з входами формувачів вхідних сигналів, перший суматор, входи якого підключені до виходів блоків задання вагових коефіцієнтів, другий суматор, входи якого підключені до виходів блоків задання вагових коефіцієнтів, третій суматор, керований формувач спайку, групу нелінійних елементів за кількістю збуджуючих і гальмуючих входів пристрою, які розділені і через відповідні послідовні ланки з'єднані з входами першого і другого суматорів, виходи яких з'єднані з входами третього суматора, вихід керованого формувача є виходом пристрою, який відрізняється тим, що в нього введено адаптивний суматор, перетворювач тривалості в частоту, керуючий блок, перетворювач напруги в тривалість, масштабуючий елемент, виходи першого і другого суматорів з'єднані з відповідними входами адаптивного суматора, вихід якого з'єднаний з входом перетворювача тривалості в частоту і першим входом керуючого блока, вихід третього суматора через масштабуючий елемент і перетворювач напруги в тривалість з'єднаний з другим входом керуючого блока, вихід якого з'єднаний з другим входом керованого формувача спайку, перший вхід якого з'єднаний з виходом перетворювача тривалості в частоту, вхід задання порога адаптивного суматора з'єднаний з відповідним входом пристрою.
Текст
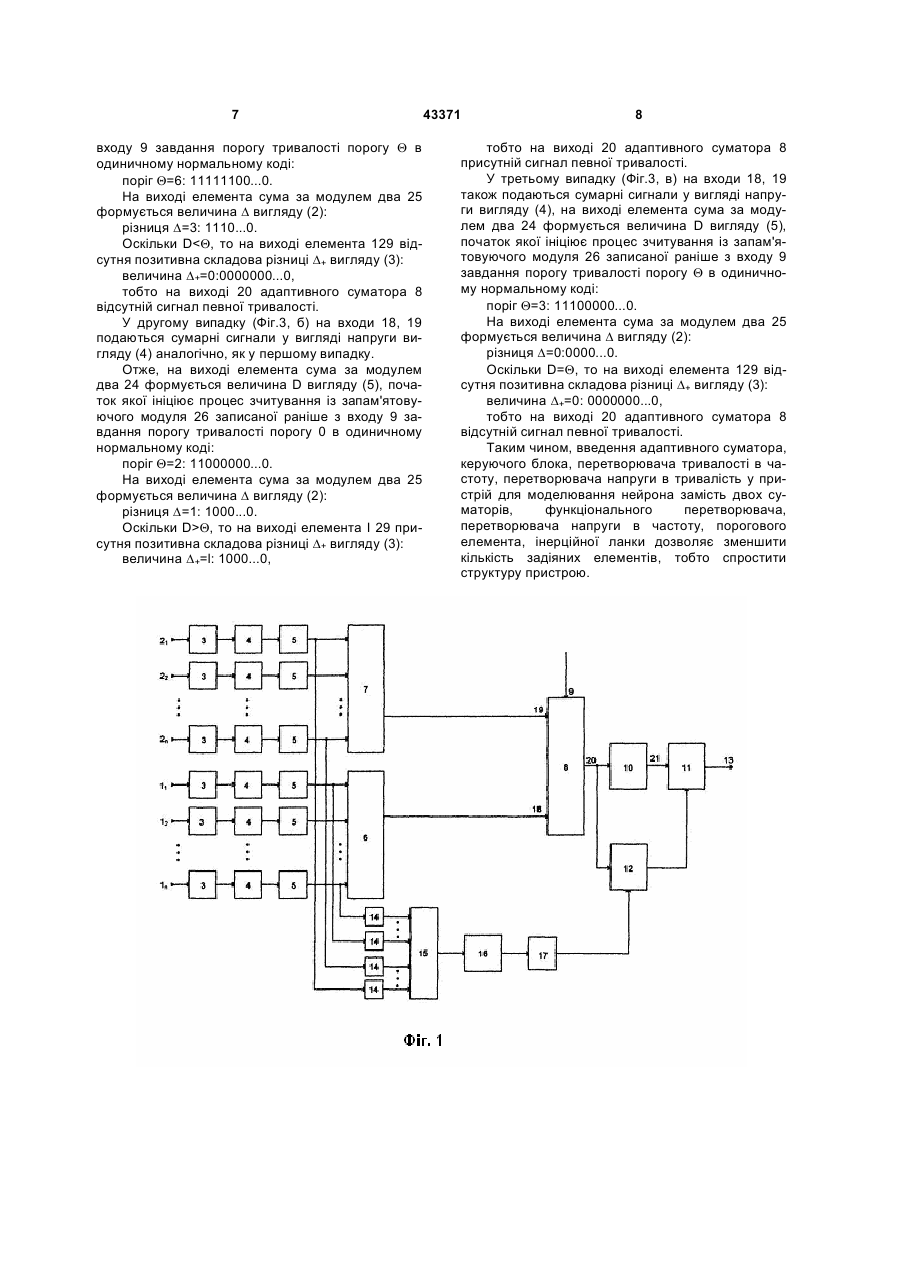
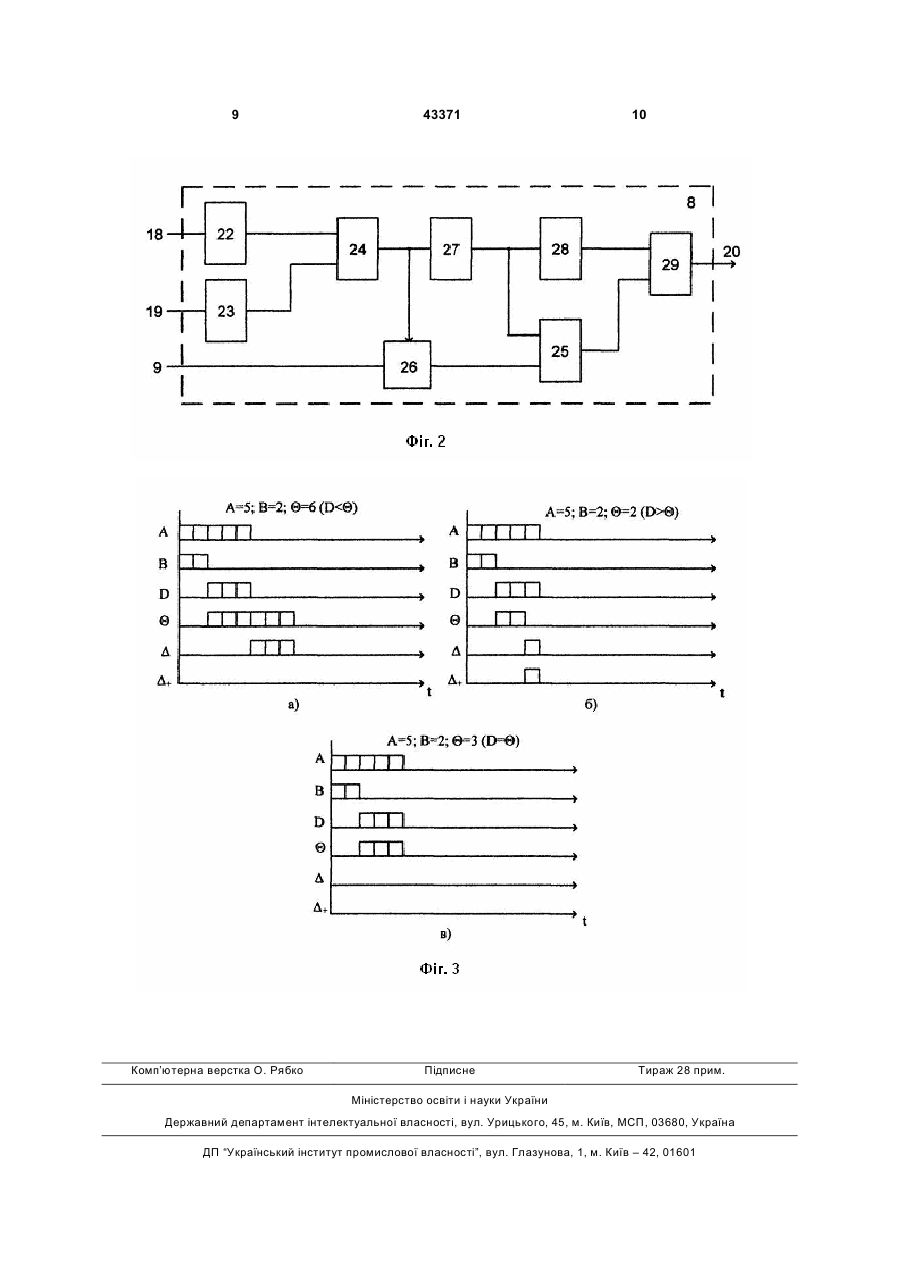
Пристрій для моделювання нейрона, який містить послідовні ланки у вигляді формувачів вхідних сигналів, перетворювачів частоти в напругу і блоків задання вагових коефіцієнтів, гальмуючі і збуджуючі входи пристрою з'єднані з входами формувачів вхідних сигналів, перший суматор, входи якого підключені до виходів блоків задання вагових коефіцієнтів, другий суматор, входи якого підключені до виходів блоків задання вагових коефіцієнтів, третій суматор, керований формувач спайку, групу нелінійних елементів за кількістю збуджуючих і гальмуючих входів пристрою, які 3 керованого формувача, третій і четвертий суматори, п'ятий суматор з двома входами, групу нелінійних елементів за кількістю збуджуючих і гальмуючих входів пристрою, які розділені і через відповідні послідовні ланки з'єднані з входами першого і другого суматорів, виходи яких з'єднані з входами третього суматора, вихід якого з'єднаний з входами функціонального перетворювача і порогового елемента, збуджуючі входи пристрою через відповідні послідовні ланки з'єднані з входами нелінійних елементів, входи яких з'єднані з входами четвертого суматора, вихід якого з'єднаний з третім входом п'ятого суматора. Недоліком даного пристрою є складність його структури. В основу корисної моделі поставлено задачу створення пристрою для моделювання нейрона, в якому за рахунок введення нових блоків з розширеними функціональними можливостями та нових зв'язків досягається спрощення структури пристрою. Поставлена задача вирішується тим, що у пристрій для моделювання нейрона, який містить послідовні ланки у вигляді формувачів вхідних сигналів, перетворювачів частоти в напругу і блоків завдання вагових коефіцієнтів, гальмуючі і збуджуючі входи пристрою з'єднані з входами формувачів вхідних сигналів, перший суматор, входи якого підключені до виходів блоків завдання вагових коефіцієнтів, другий суматор, а входи якого підключені до виходів блоків завдання вагових коефіцієнтів, третій суматор, керований формувач спайку, групу нелінійних елементів за кількістю збуджуючих і гальмуючих входів пристрою, які розділені і через відповідні послідовні ланки з'єднані з входами першого і другого суматорів, а виходи яких з'єднані з входами третього суматора, вихід керованого формувача є виходом пристрою, введено адаптивний суматор, перетворювач тривалості в частоту, керуючий блок, перетворювач напруги в тривалість, масштабуючий елемент, виходи першого і другого суматорів з’єднані з відповідними входами адаптивного суматора, вихід якого з'єднаний з входом перетворювача тривалості в частоту і з першим входом керуючого блока, вихід третього суматора через масштабуючий елемент і перетворювач напруги в тривалість з'єднаний з другим входом керуючого блока, вихід якого з'єднаний з другим входом керованого формувача спайку, перший вхід якого з'єднаний з виходом перетворювача тривалості в частоту, вхід задання порогу адаптивного суматора з'єднаний з відповідним входом пристрою. На Фіг.1 показано структурну схему пристрою для моделювання нейрона, на Фіг.2 наведено функціональну схему адаптивного суматора, на Фіг.3 зображено часові діаграми функціонування пристрою. Пристрій для моделювання нейрона (Фіг.1) містить збуджуючі 11...,1n і гальмуючі 21,...,2n входи послідовних ланок у вигляді формувача 3 вхідних сигналів, перетворювача 4 частоти в напругу і блока 5 завдання вагових коефіцієнтів, два суматори 6, 7, адаптивний суматор 8, вхід 9 завдання порогу, перетворювач 10 тривалості в частоту, 43371 4 керований формувач 11 спайку, керуючий блок 12, вихід 13 пристрою, групу 2п нелінійних елементів 14, суматор 15, масштабуючий елемент 16, перетворювач 17 напруги в тривалість. Збуджуючі входи 11...,1n і гальмуючі 21,...,2n входи з'єднані з входами відповідних послідовних ланок, які є входами відповідних формувачів 3 вхідних сигналів. У кожній послідовній ланці вихід формувача З вхідних сигналів з'єднаний з входом перетворювача 4 частоти в напругу, вихід якого з'єднаний з входом блока 5 завдання вагових коефіцієнтів, вихід якого є виходом відповідної послідовної ланки. Для всіх послідовних ланок, що пов'язані зі збуджуючими входами 11...,1n вихід блока 5 завдання вагових коефіцієнтів з'єднаний з відповідним входом суматора 6. Для всіх послідовних ланок, що пов'язані з гальмуючими входами 21,...,2n вихід блока 5 завдання вагових коефіцієнтів з'єднаний з відповідним входом суматора 7. Виходи суматорів 6 і 7 з'єднані з входами 18 і 19 адаптивного суматора 8, вихід 20 якого з'єднаний з входом перетворювача 10 тривалості в частоту і з першим входом керуючого блока 12. Вихід 21 перетворювача 10 тривалості в частоту з'єднаний з першим входом керованого формувача 11 спайку, а входи нелінійних елементів 14 з'єднані з входами суматорів 6 і 7, виходи всіх нелінійних елементів 14 з'єднані з відповідними входами суматора 15, вихід якого підключений до входу масштабуючого елемента 16, вихід якого з'єднаний з входом перетворювач 17 напруги в тривалість. Вихід перетворювача 17 напруги в тривалість з'єднаний з другим входом керуючого блока 12, вихід якого з'єднаний з другим входом керованого формувача 11, вихід якого є виходом 13 пристрою, а вхід 9 задання порогу адаптивного суматора 8 з'єднаний з відповідним входом пристрою. Адаптивний суматор 8 (Фіг.2) містить два перетворювачі 22,23 напруги в тривалість, два елементи сума за модулем два 24, 25, запам'ятовуючий модуль 26, елементи 27, 28 затримки, елемент I 29. Вхід 9 завдання порогу підключений до інформаційного входу запам'ятовуючого модуля 26, інформаційні входи 18 і 19 з'єднані з входами перетворювачів 22 і 23 напруги в тривалість відповідно, виходи яких з'єднані з першим та другим входами елемента сума за модулем два 24 відповідно, вихід якого з'єднаний з входом дозволу зчитування запам'ятовуючого модуля 26 і через елемент 27 затримки з першим входом елемента сума за модулем два 25, другий вхід якого з'єднаний з виходом запам'ятовуючого модуля 26. Вихід елемента сума за модулем два 25 з'єднаний з другим входом елемента І 29, перший вхід якого з'єднаний з виходом елемента 28 затримки, вихід елемента І 29 є виходом 20 адаптивного суматора 8. Пристрій для моделювання нейрона (Фіг.1) працює в такий спосіб. На збуджуючі 11...,1n, та гальмуючі 21,...,2n входи відповідних груп формувачів 3 подаються вхідні імпульсні послідовності, які перетворюються у напруги, що пропорційні частотам, перетворювачами 4 частоти в напругу. Потім вони масштабуються в блоках 5 завдання вагових коефіцієнтів за 5 амплітудою і знаком у відповідності з синаптичними вагами і знаком синапсу (збуджуючий чи гальмуючий). Ці напруги підсумовуються окремо: для збуджуючих у суматорі 6, для гальмуючих - у суматорі 7. В адаптивному суматорі 8 сумарний гальмуючий сигнал віднімається від сумарного збуджуючого сигналу і отримана різниця порівнюється з величиною порогу, який був зафіксований на вході 9 задання порогу адаптивного суматора 8. У випадку, коли сигнал різниці перевищує сигнал порогу на виході 20 адаптивного суматора 8 з'являється сигнал, який перетворюється у частоту імпульсів, що генеруються перетворювачем 10 тривалості в частоту. Ці імпульси з виходу 21 перетворювача 10 тривалості в частоту подаються на керований формувач 11 спайку разом із сигналом з виходу керуючого блока 12. При зростанні різницевого сигналу в адаптивному суматорі 8, тобто при підсиленні стимуляції нейрона, який призводить до зростання частоти розрядів, сигнал на виході 20 адаптивного суматорі 8 є також керуючим для формувача 11 спайку і змінює параметри спайків на виході 13 пристрою, що генеруються зі зростанням частоти, а саме зменшує їх амплітуду, збільшує тривалість і зменшує до нуля величину слідової гіперполяції. Якщо напруга хоча б одного синапса послідовної ланки перевищує поріг нелінійного елемента 14 і потрапляє в лінійну зону його характеристики, на виході суматора 15 з'являється напруга, що надходить через масштабуючий елемент 16 і перетворювач 17 напруги в тривалість на другий вхід керуючого блока 12. Після підсумовування з керуючим сигналом від адаптивного суматора 8 збільшується швидкість зміни вихідних спайків, тобто скорочується час появи песимуму. Масштабуючий елемент 16 використовують для регулювання зміни коефіцієнта підсилення і підлаштування швидкості появи песимуму по конкретному нейрону. Одна і та сама частота розрядів нейрона може бути досягнута при низькочастотній активації більшості збуджуючих входів 11...,1n, тобто при слабких сигналах з виходів блоків 5 завдання вагових коефіцієнтів або при високочастотній активації одного-двох збуджуючих входів 11...1n при сильних сигналах з виходів відповідних їм блоків 5 завдання вагових коефіцієнтів. При цьому параметри вихідних спайків на виході 13 пристрої у цих двох випадках будуть різними. У першому випадку, оскільки сигнали з виходів блоків 5 не перевищують пороги нелінійних елементів 14, на виході суматора 15, масштабуючого елемента 16 і перетворювача 17 напруги в тривалість сигнал дорівнює нулю і керування формувачем 11 спайку здійснюється з першого входа керуючого блока 12. У другому випадку сигнал з блока 5 завдання вагових коефіцієнтів, який відповідає сильно активованому збуджуючому входу 1i (i=1,..., n), перевищує поріг зв'язаного з ним нелінійного елемента 14 і на другому вході керуючого блока 12 з'являється сигнал, що додається до керуючого сигналу, який поступає по першому входу керуючого блока 12. Сумарний сигнал з виходу керуючого блока 12 є сигналом керування для формувача 11 спайку. 43371 6 Таким чином, запропонований пристрій забезпечує залежність швидкості розвитку песимума від сили, тобто синаптичного сигналу, подразнення, що реалістичніше відтворює функції живого нейрона. Пристрій неоднозначно реагує параметрами спайків (амплітуда, тривалість, рівень слідової гіперполяції) на зростання частоти вихідної спайкової послідовності. Вирішальне значення має причина підвищення цієї частоти - внаслідок збільшення постсинаптичного потенціалу при слабкій активації більшого числа збуджуючих входів або за рахунок сильної стимуляції окремих синапсів, тобто при зростанні постсинаптичного сигналу. Адаптивний суматор 8 (Фіг.2) працює наступним чином. Поріг ® у вигляді тривалості через вхід 9 подається на інформаційний вхід запам'ятовуючого модуля 26. Сумарний збуджуючий сигнал через інформаційний вхід 18 адаптивного суматора 8 подається на перетворювач 22 напруги в тривалість, де формується тривалість А, одночасно сумарний гальмуючий сигнал через інформаційний вхід 19 подається на перетворювач 23 напруги в тривалість, де формується тривалість В. В елементі сума за модулем два 24 формується різниця цих тривалостей, тобто D=dif(A,B)=|A-B|. (1) Отримана різницева тривалість D подається через елемент 27 затримки на перший вхід елемента сума за модулем два 25. Крім того, одиничний сигнал різницевої тривалості D подається на вхід дозволу зчитування запам'ятовуючого модуля 26, причому елемент 27 затримки узгоджений по часу спрацювання запам'ятовуючого модуля 26. Таким чином, із запам'ятовуючого модуля 26 зчитується пороговий сигнал у вигляді тривалості Q, який в елементі сума за модулем два 25 порівнюється із затриманою різницевою тривалістю D вигляду (1) і формується тривалість ∆ вигляду: ∆=dif(D, Q)=|D-Q|, (2) яка подається на другий вхід елемента І 29. Різницева тривалість D ще раз затримується на елементі 28 затримки на час спрацювання елемента сума за модулем два 25 і подається на перший вхід елемента І 29, на виході якого формується позитивна складова ∆+ різниці ∆, тобто ∆+=D-Q, (3) тільки у випадку, якщо D>Q. Отримана тривалість ∆+ знімається з виходу 20 адаптивного суматора 8. Розглянемо три приклади порогового оброблення в адаптивному суматорі 8. У першому випадку (Фіг.3, а) на входи 18, 19 подаються сумарні сигнали у вигляді напруги зі значенням 5 і 2 відповідно. З виходів перетворювачів 22 і 23 напруги в тривалість на входи елемента сума за модулем два 24 подаються відповідні тривалості в одиничному нормальному коді: величина А=5: 11111000...0, величина В=2: 11000000...0. (4) На виході елемента сума за модулем два 24 формується величина D вигляду (1): різниця D=3: 111000...0, (5) початок якої ініціює процес зчитування із запам'ятовуючого модуля 26 записаної раніше з 7 входу 9 завдання порогу тривалості порогу Q в одиничному нормальному коді: поріг Q=6: 11111100...0. На виході елемента сума за модулем два 25 формується величина ∆ вигляду (2): різниця ∆=3: 1110...0. Оскільки D
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for neuron modeling
Автори англійськоюMartyniuk Tetiana Borysivna, Kolisnyk Petro Fedorovych, Tymchenko Leonid Ivanovych, Onachenko Marat Serhiiovych
Назва патенту російськоюУстройство для моделирования нейрона
Автори російськоюМартынюк Татьяна Борисовна, Колиснык Петр Федорович, Тимченко Леонид Иванович, Оначенко Марат Сергеевич
МПК / Мітки
МПК: G06G 7/60
Мітки: моделювання, нейрона, пристрій
Код посилання
<a href="https://ua.patents.su/5-43371-pristrijj-dlya-modelyuvannya-nejjrona.html" target="_blank" rel="follow" title="База патентів України">Пристрій для моделювання нейрона</a>
Пристрій для моделювання нейрона
Номер патенту: 40452
Опубліковано: 10.04.2009
Автори: Мартинюк Тетяна Борисівна, Оначенко Марат Сергійович, Фофанова Наталя Володимирівна, Колісник Петро Федорович
МПК: G06G 7/60
Мітки: моделювання, нейрона, пристрій
Формула / Реферат:
Пристрій для моделювання нейрона, який містить блоки моделювання синапсів, що складаються з послідовно з'єднаних узгоджуючих елементів, елементів затримки і масштабуючих елементів, виходи яких є виходами блоків моделювання синапсів, входами яких є входи узгоджуючих елементів, адитивний суматор, блок моделювання викликаних постсинаптичних потенціалів, формувач імпульсів, послідовно з'єднані перший перетворювач частоти в напругу, компаратор,...
Пристрій для моделювання нейрона
Номер патенту: 25525
Опубліковано: 30.10.1998
Автори: Спіченков Юрій Миколайович, Смердов Андрій Андрійович, Романишин Юрій Михайлович
МПК: G06G 7/60, G09B 23/26
Мітки: пристрій, моделювання, нейрона
Формула / Реферат:
Пристрій для моделювання нейрона, що містить групу каналів сигналів збудження, групу каналів сигналів гальмування та одновібратор, вихід якого є виходом пристрою, який відрізняється тим, що в нього додатково введені послідовно з'єднані суматор та пороговий елемент у вигляді схеми порівняння на більше, а кожний з каналів сигналів збудження та гальмування виконаний у вигляді перетворювача струму в напругу, вихід якого з'єднаний з входом...
Пристрій для моделювання нейрона
Номер патенту: 27751
Опубліковано: 12.11.2007
Автори: Мартинюк Тетяна Борисівна, Мороз Ірина Віталіївна, Кожем'яко Андрій Вікторович, Кожем'яко Володимир Прокопович
МПК: G06G 7/60
Мітки: пристрій, моделювання, нейрона
Формула / Реферат:
Пристрій для моделювання нейрона, який містить n блоків зміни синаптичних ваг, перші і другі входи яких є інформаційними входами пристрою, суматор, перші n входів якого з'єднані відповідно з виходами n блоків зміни синаптичних ваг, і логічний блок, який відрізняється тим, що в нього введено комутатор, причому встановлювальний вхід і перший керуючий входи пристрою з'єднані з відповідними входами n блоків зміни синаптичних ваг, вхід скидання і...
Пристрій для моделювання нейрона
Номер патенту: 34466
Опубліковано: 11.08.2008
Автори: Колесницький Олег Костянтинович, Кожем'яко Володимир Прокопович, Мороз Ірина Віталіївна, Мартинюк Тетяна Борисівна, Чечельницький Олег Іванович
МПК: G06G 7/60
Мітки: нейрона, пристрій, моделювання
Формула / Реферат:
Пристрій для моделювання нейрона, який містить n блоків зміни синаптичних ваг, перші і другі входи яких є інформаційними входами пристрою, суматор, перші n входів якого з'єднані відповідно з виходами n блоків зміни синаптичних ваг, який відрізняється тим, що в нього введено комутатор, причому установний і перший керуючий входи пристрою з'єднані з відповідними входами n блоків зміни синаптичних ваг, вхід скидання, вхід порога, адресний і...
Пристрій для моделювання адаптивного нейрона
Номер патенту: 22679
Опубліковано: 25.04.2007
Автори: Мартинюк Тетяна Борисівна, Луньов Андрій Олегович, Гладська Олена Віталіївна
МПК: G06G 7/60
Мітки: пристрій, нейрона, моделювання, адаптивного
Формула / Реферат:
Пристрій для моделювання адаптивного нейрона, який містить суматор, послідовно з'єднані блок просторово-часового підсумовування і блок екстремального регулювання, перший функціональний перетворювач, послідовно з'єднані регульоване джерело енергії і другий функціональний перетворювач, а також містить блок задання діаметра соми нейрона, блок задання діаметра аксонного горбка нейрона, блок формування рівня дисбалансу енергії і блок обчислення...
Попередній патент: Турбодвигун мельничука
Наступний патент: Транспортний засіб на комбінованому ходу
Випадковий патент: Сівалка