Спосіб випробування трубопроводів і пристрій для контролю трубопроводів
Формула / Реферат
1. Пристрій для контролю трубопроводів, який переміщується по трубопроводу і включає в себе генераторний засіб для генерації поля вихрових струмів всередині трубопроводу і детекторний засіб для виявлення результуючого поля, який відрізняється тим, що пристрій контролю виконаний з можливістю визначення наявності дефектів в трубопроводах як з чорних, так і з кольорових металів, причому детекторний засіб містить перший і другий приймачі, віддалені в подовжньому напрямі на будь-якій стороні від котушки збудження, що знаходиться в одному місці і створює генераторний засіб, при цьому приймачі виконані з можливістю прийому інформації, що надходить від котушки збудження, в двох місцях, віддалених в подовжньому напрямі, на трубопроводі, причому інформація оновлюється при переміщенні пристрою по трубопроводу, і містить комп'ютерний засіб для вибору частоти збудження котушки в залежності від виконання трубопроводу, що випробовується, з чорних і кольорових металів.
2. Пристрій за п. 1, який відрізняється тим, що комп'ютерний засіб виконаний з можливістю вибору частоти в діапазоні 20 Гц - 1 кГц.
3. Пристрій за пп. 1 або 2, який відрізняється тим, що котушка збудження є єдиною котушкою, що збуджується, і відділена від першого і другого приймачів відділяючими засобами, виконаними з можливістю ослаблення будь-якого сигналу, що досягає приймачів не через стінки трубопроводу.
4. Пристрій за пп. 1, 2 або 3, який відрізняється тим, що ведучий процесор сполучений з першим приймачем і котушкою збудження для управління вказаними приймачем і котушкою для видачі інформації про синхронізацію у другий приймач через ведений процесор.
5. Пристрій за будь-яким з пп. 1 - 4, який відрізняється тим, що включає в себе засіб для визначення інформації про вихрові струми, що стосується як амплітуди, так і фази, і засіб для визначення відмінностей між внутрішніми і зовнішніми дефектами стінки труби в залежності від вказаної інформації.
6. Пристрій за будь-яким з пп. 1 - 5, який відрізняється тим, що включає в себе засіб для буксирування пристрою контролю по трубопроводу, засіб для визначення інформації про відстань і засіб для визначення інформації про орієнтацію по азимуту пристрою контролю, коли він переміщається по трубопроводу.
7. Пристрій за будь-яким з пп. 1 - 6, який відрізняється тим, що комп'ютерний засіб виконаний з можливістю відображення інформації про виявлені амплітуду і фазу, а також інформації про азимут і швидкість, коли пристрій переміщається вздовж трубопроводу.
8. Пристрій за будь-яким з пп. 1 - 7, який відрізняється тим, що включає в себе засіб для генерування пакетів даних для передачі у віддалений комп'ютерний засіб для оцінки.
9. Пристрій за будь-яким з пп. 1 - 8, який відрізняється тим, що включає в себе засіб для визначення розмірів дефектної дільниці на трубопроводі.
10. Пристрій за будь-яким з пп. 1 - 9, який відрізняється тим, що детекторний засіб включає в себе безліч котушок датчиків, сполучених за допомогою засобів узгодження сигналів з мікропроцесором, який утворює канал процесора, причому процесор приймає опорний сигнал для синхронізації вибірки даних.
11. Пристрій за будь-яким з пп. 1 - 10, який відрізняється тим, що кожний засіб приймача для виявлення сигналів містить кільце датчиків, рознесених по його периферії.
12. Пристрій за будь-яким з пп. 1 - 11, який відрізняється тим, що він являє собою засіб доставки, що буксирується, виконаний з можливістю проходження по колінах в трубопроводі, і включає в себе перший датчик азимута, розміщений разом з першим приймачем, і другий датчик азимута, розміщений разом з другим приймачем, для видачі інформації про орієнтацію з метою компенсації обертання засобу доставки всередині трубопроводу і будь-якого перекосу між першим і другим приймачами.
13. Спосіб випробування трубопроводу з використанням пристрою для контролю трубопроводу, по якому генерують вихровий струм в котушці у вказаному пристрої і виявляють вихровий струм, що індукується в стінці трубопроводу, який відрізняється тим, що він включає етапи, на яких вибирають частоту збудження котушки в залежності від характеру трубопроводу для забезпечення можливості випробувань трубопроводів як з чорних, так і з кольорових металів, виявляють вихровий струм, що індукується в двох місцях, віддалених в подовжньому напрямі від котушки, розташованої в одному місці між ними, і оновлюють інформацію, коли пристрій переміщається вздовж трубопроводу, для забезпечення визначення дефектів в трубопроводі.
14. Спосіб за п. 13, який відрізняється тим, що частоту збудження вибирають в межах діапазону 20 Гц - 1 кГц.
15. Спосіб за п. 13 або 14, який відрізняється тим, що включає етап ослаблення будь-якого сигналу, що приймається на етапі виявлення, відмінного від сигналу, що приймається через стінку трубопроводу.
16. Спосіб за п. 13, 14 або 15, який відрізняється тим, що етап виявлення включає в себе виявлення амплітуди і фази вихрового струму для визначення відмінностей між внутрішніми і зовнішніми дефектами стінки трубопроводу.
17. Спосіб за будь-яким з пп. 13 - 16, який відрізняється тим, що включає етапи, на яких буксирують пристрій по трубопроводу, визначають пройдену відстань і визначають орієнтацію положення детекторного засобу в трубопроводі, коли пристрій переміщається по трубопроводу.
18. Спосіб за будь-яким з пп. 13 - 17, який відрізняється тим, що включає етап, на якому визначають розміри дефекту в трубопроводі, виходячи з отриманої інформації.
19. Спосіб за будь-яким з пп. 13-18, який відрізняється тим, що використовують пристрій, який являє собою засіб доставки, що буксирується, який виконують з можливістю проходження по колінах в трубопроводі і обладнують першим датчиком азимута, який розміщують разом з першим приймачем, і другим датчиком азимута, який розміщують разом з другим приймачем, для видачі інформації про орієнтацію, для компенсації обертання засобу доставки, що буксирують, всередині трубопроводу і будь-якого перекосу між першим і другим приймачами. при переміщенні засобу доставки по трубопроводу.
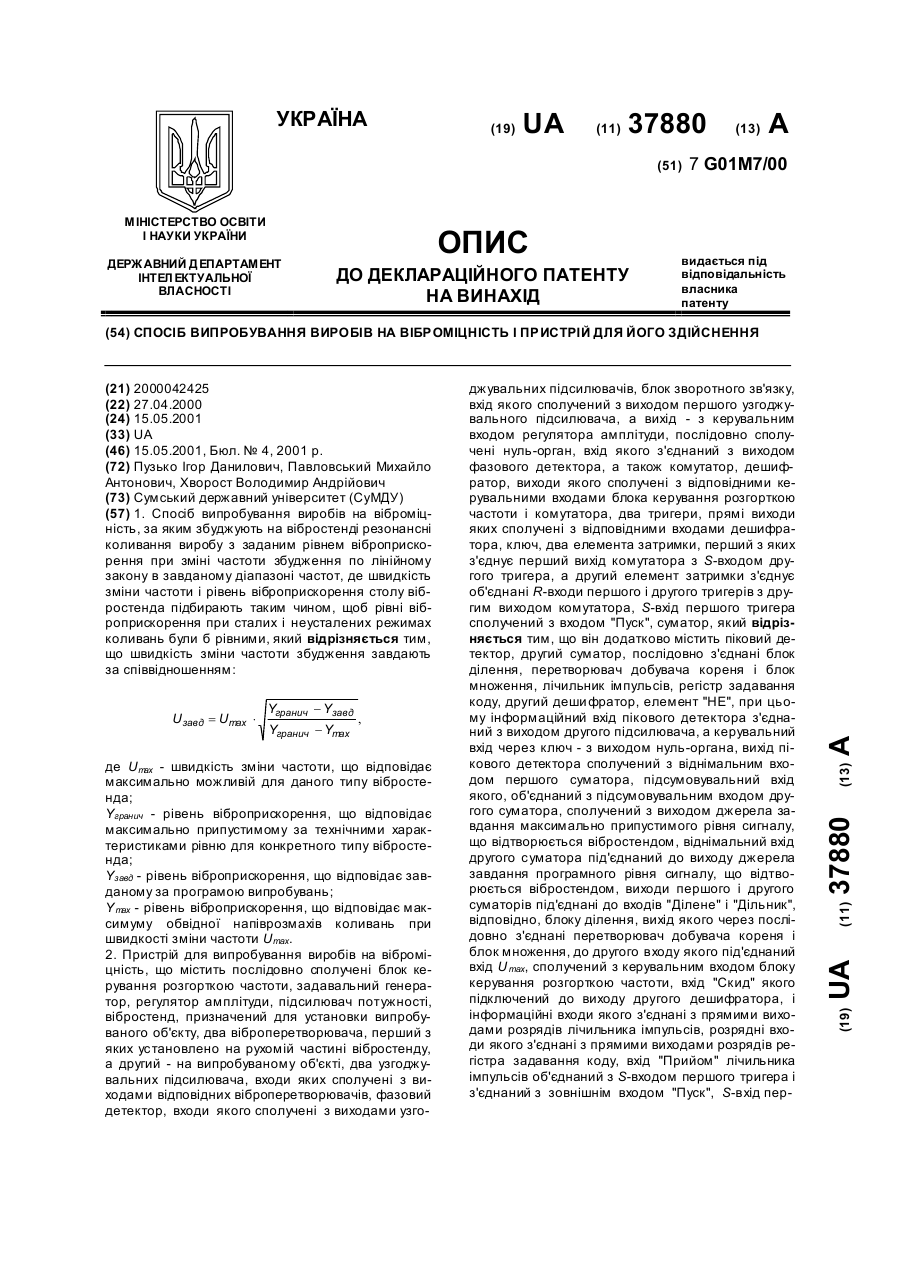
20. Спосіб за будь-яким з пп. 13 - 19, який відрізняється тим, що включає етапи, на яких посилають команду сканування із засобу, віддаленого від пристрою, збирають дані амплітуди у відповідь на вказану команду, збирають дані фази у відповідь на вказану команду, форматують дані в пакет, передають пакет у вказаний віддалений засіб і виявляють інформацію про азимут для забезпечення обертання пристрою всередині трубопроводу.
Текст
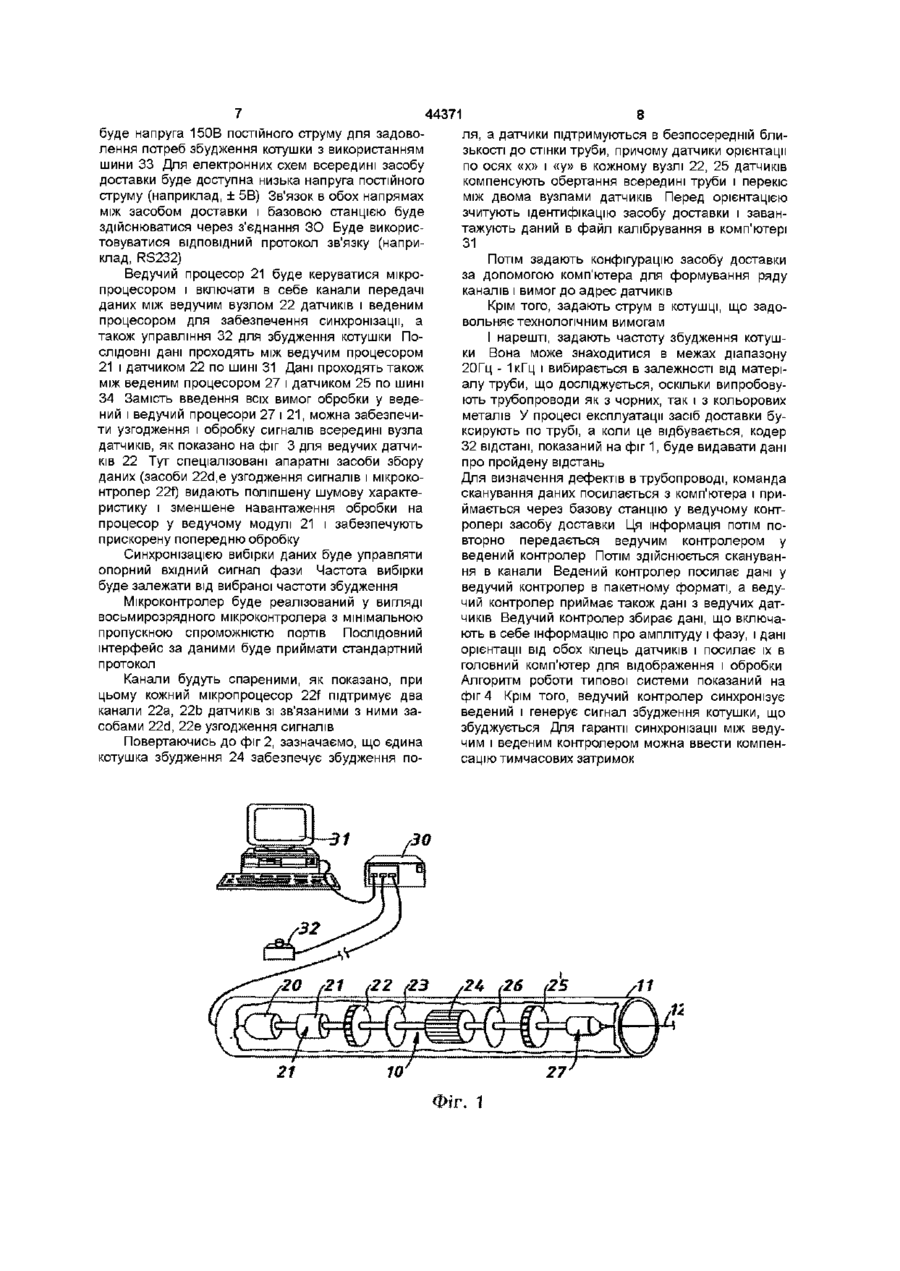
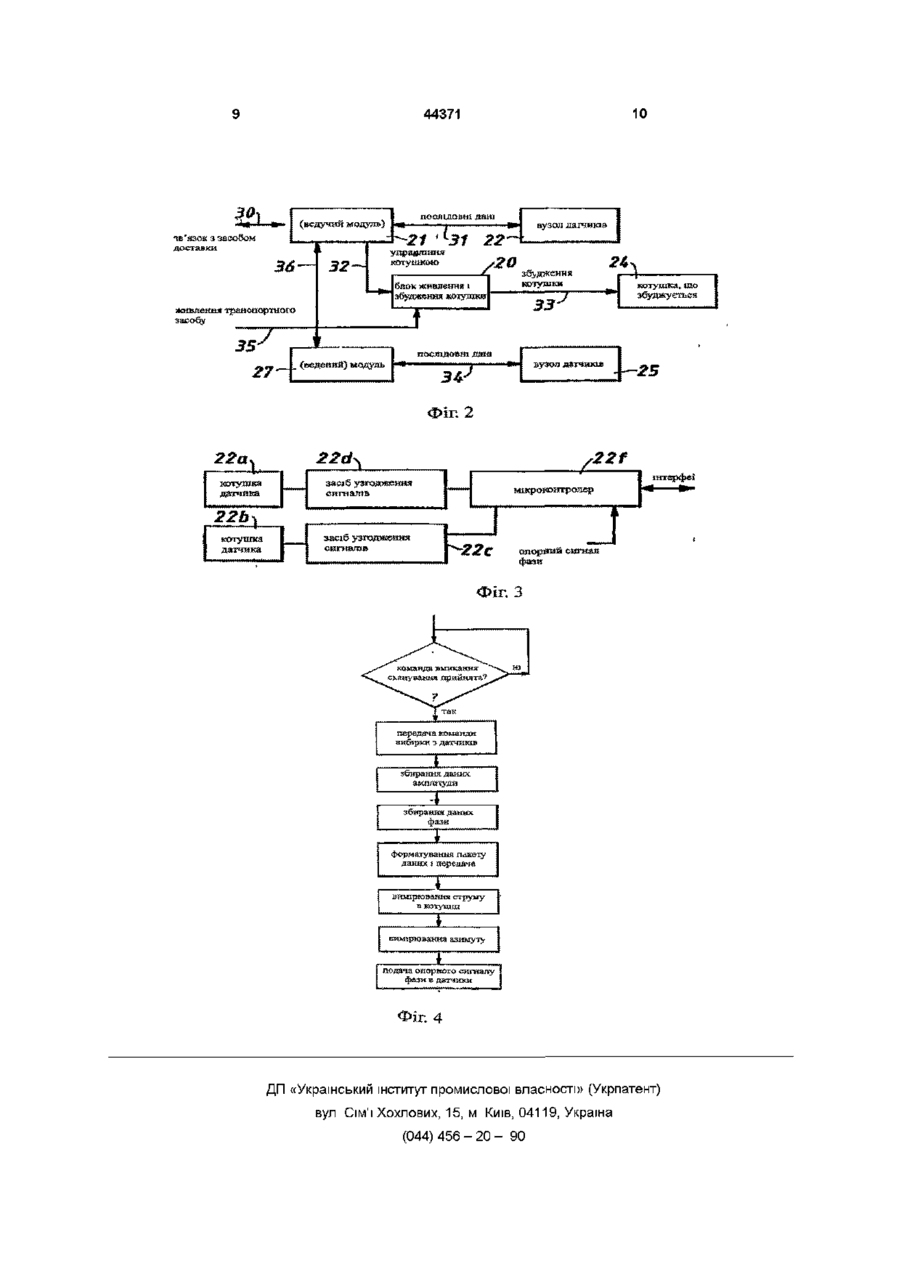
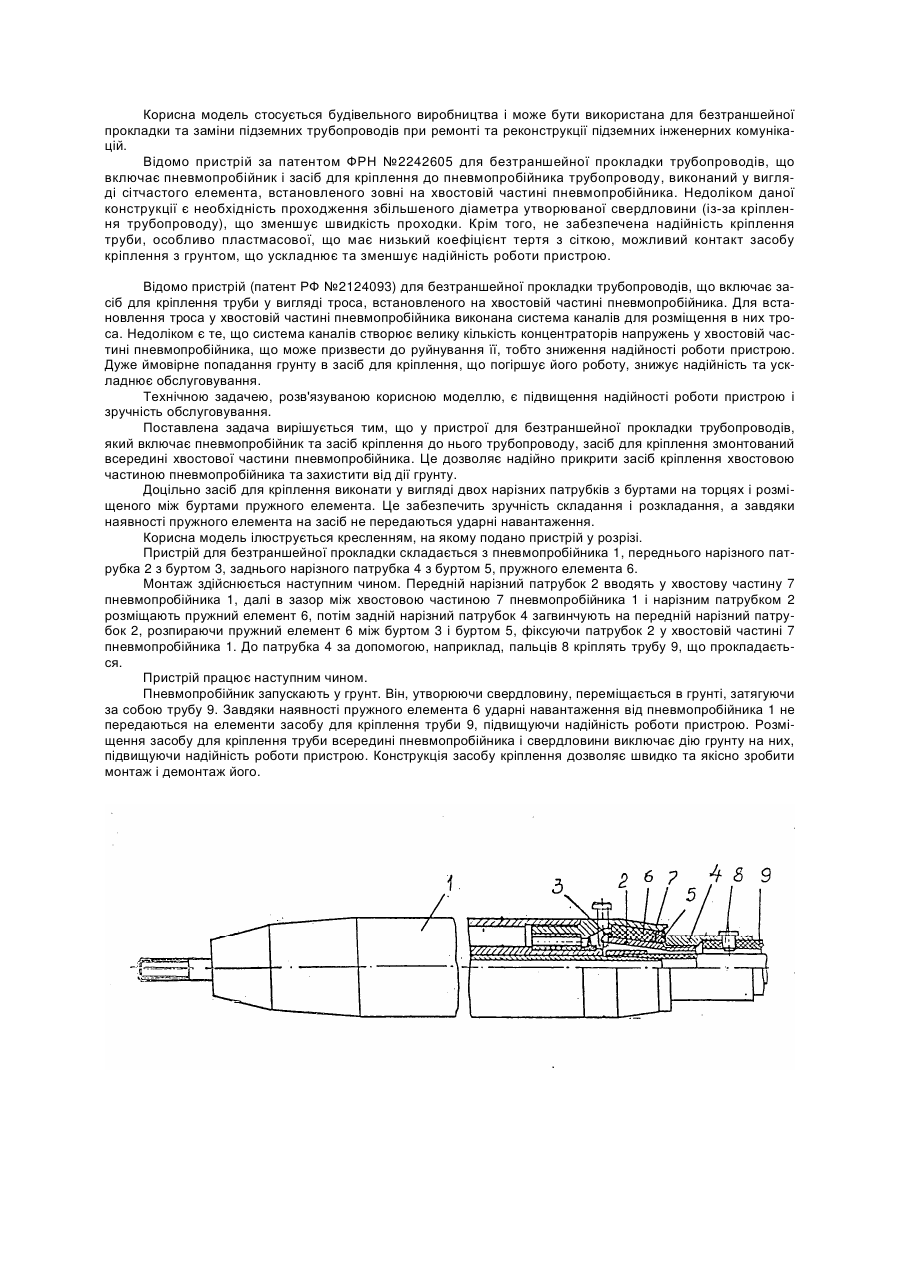
1 Пристрій для контролю трубопроводів, який переміщується по трубопроводу і включає в себе генераторний засіб для генерації поля вихрових струмів всередині трубопроводу і детекторний засіб для виявлення результуючого поля, який відрізняється тим, що пристрій контролю виконаний з можливістю визначення наявності дефектів в трубопроводах як з чорних, так і з кольорових металів, причому детекторний засіб містить перший і другий приймачі, віддалені в подовжньому напрямі на будь-якій стороні від котушки збудження, що знаходиться в одному МІСЦІ І створює генераторний засіб, при цьому приймачі виконані з можливістю прийому інформації, що надходить від котушки збудження, в двох місцях, віддалених в подовжньому напрямі, на трубопроводі, причому інформація оновлюється при переміщенні пристрою по трубопроводу, і містить комп'ютерний засіб для вибору частоти збудження котушки в залежності від виконання трубопроводу, що випробовується, з чорних і кольорових металів 2 Пристрій за п 1, який відрізняється тим, що комп'ютерний засіб виконаний з можливістю вибору частоти в діапазоні 20 Гц -1 кГц 3 Пристрій за пп 1 або 2, який відрізняється тим, що котушка збудження є єдиною котушкою, що збуджується, і відділена від першого і другого приймачів ВІДДІЛЯЮЧИМИ засобами, виконаними з можливістю ослаблення будь-якого сигналу, що досягає приймачів не через стінки трубопроводу 4 Пристрій за пп 1,2 або 3, який відрізняється тим, що ведучий процесор сполучений з першим приймачем і котушкою збудження для управління вказаними приймачем і котушкою для видачі інформації про синхронізацію у другий приймач через ведений процесор 5 Пристрій за будь-яким з пп 1-4, який відрізняється тим, що включає в себе засіб для визначення інформації про вихрові струми, що стосується як амплітуди, так і фази, і засіб для визначення відмінностей між внутрішніми і ЗОВНІШНІМИ дефектами стінки труби в залежності від вказаної інформації 6 Пристрій за будь-яким з пп 1 - 5, який відрізняється тим, що включає в себе засіб для буксирування пристрою контролю по трубопроводу, засіб для визначення інформації про відстань і засіб для визначення інформації про орієнтацію по азимуту пристрою контролю, коли він переміщається по трубопроводу 7 Пристрій за будь-яким з пп 1-6, який відрізняється тим, що комп'ютерний засіб виконаний з можливістю відображення інформації про виявлені амплітуду і фазу, а також інформації про азимут і швидкість, коли пристрій переміщається вздовж трубопроводу 8 Пристрій за будь-яким з пп 1 - 7, який відрізняється тим, що включає в себе засіб для генерування пакетів даних для передачі у віддалений комп'ютерний засіб для оцінки 9 Пристрій за будь-яким з пп 1 - 8, який відрізняється тим, що включає в себе засіб для визначення розмірів дефектної ДІЛЬНИЦІ на трубопроводі 10 Пристрій за будь-яким з пп 1-9, який відрізняється тим, що детекторний засіб включає в себе безліч котушок датчиків, сполучених за допомогою засобів узгодження сигналів з мікропроцесором, який утворює канал процесора, причому процесор приймає опорний сигнал для синхронізації вибірки даних 11 Пристрій за будь-яким з пп 1 - 10, який відрізняється тим, що кожний засіб приймача для виявлення сигналів містить кільце датчиків, рознесених по його периферії 12 Пристрій за будь-яким з пп 1 - 11, який відрізняється тим, що він являє собою засіб доставки, що буксирується, виконаний з можливістю проходження по колінах в трубопроводі, і включає в себе перший датчик азимута, розміщений разом з першим приймачем, і другий датчик азимута, розміщений разом з другим приймачем, для видачі інформації про орієнтацію з метою компенсації О со 44371 обертання засобу доставки всередині трубопроводу і будь-якого перекосу між першим і другим приймачами 13 Спосіб випробування трубопроводу з використанням пристрою для контролю трубопроводу, по якому генерують вихровий струм в котушці у вказаному пристрої і виявляють вихровий струм, що індукується в СТІНЦІ трубопроводу, який відрізняється тим, що він включає етапи, на яких вибирають частоту збудження котушки в залежності від характеру трубопроводу для забезпечення можливості випробувань трубопроводів як з чорних, так і з кольорових металів, виявляють вихровий струм, що індукується в двох місцях, віддалених в подовжньому напрямі від котушки, розташованої в одному МІСЦІ між ними, і оновлюють інформацію, коли пристрій переміщається вздовж трубопроводу, для забезпечення визначення дефектів в трубопроводі 14 Спосіб за п 13, який відрізняється тим, що частоту збудження вибирають в межах діапазону 20 Гц -1 кГц 15 Спосіб за п 13 або 14, який відрізняється тим, що включає етап ослаблення будь-якого сигналу, що приймається на етапі виявлення, ВІДМІННОГО ВІД сигналу, що приймається через стінку трубопроводу 16 Спосіб за п 13, 14 або 15, який відрізняється тим, що етап виявлення включає в себе виявлення амплітуди і фази вихрового струму для визначення відмінностей між внутрішніми і ЗОВНІШНІМИ дефектами стінки трубопроводу 17 Спосіб за будь-яким з пп 13 - 16, який Винахід відноситься до контролю трубопроводів, а більш конкретно - до засобу доставки, який можна буксирувати по трубопроводу для забезпечення можливості аналізу структури його стінок Труби великого діаметра тестують користуючись складними трубопровідними скребками, які можуть працювати навіть тоді, коли труби є діючими, тобто коли по трубі тече, наприклад, газ У патенті США 4203069А показана котушка, що формує вихрові струми, призначена для використання з ротором для концентрації поля У патенті США 553259ІА розкритий пристрій, що використовує магнітне поле, що обертається для контролю дефектів в СТІНЦІ банки для напоїв У ЕР0065325А розкритий дефектоскоп, що використовує вихрові струми з котушки-джерела зі зв'язаним в ній детектором У JP08005611A розкритий дефектоскоп, що використовує передаючі і приймаючі котушки, що використовують дефектоскопію вихровими струмами зі зменшеним шумом У JP03120457A розкритий дефектоскоп, в основу якого покладено застосування вихрових струмів, що використовує котушки для зменшення впливу зовнішньої відхиляючої пластини У JP61133856A розкрита детекторна система, що використовує вимірювання товщини за допомогою як вихрових струмів, так і ультразвуку як відрізняється тим, що включає етапи, на яких буксирують пристрій по трубопроводу, визначають пройдену відстань і визначають орієнтацію положення детекторного засобу в трубопроводі, коли пристрій переміщається по трубопроводу 18 Спосіб за будь-яким з пп 13-17, який відрізняється тим, що включає етап, на якому визначають розміри дефекту в трубопроводі, виходячи з отриманої інформації 19 Спосіб за будь-яким з пп 13-18, який відрізняється тим, що використовують пристрій, який являє собою засіб доставки, що буксирується, який виконують з можливістю проходження по колінах в трубопроводі і обладнують першим датчиком азимута, який розміщують разом з першим приймачем, і другим датчиком азимута, який розміщують разом з другим приймачем, для видачі інформації про орієнтацію, для компенсації обертання засобу доставки, що буксирують, всередині трубопроводу і будь-якого перекосу між першим і другим приймачами при переміщенні засобу доставки по трубопроводу 20 Спосіб за будь-яким з пп 1 3 - 1 9 , який відрізняється тим, що включає етапи, на яких посилають команду сканування із засобу, віддаленого від пристрою, збирають дані амплітуди у ВІДПОВІДЬ на вказану команду, збирають дані фази у ВІДПОВІДЬ на вказану команду, форматують дані в пакет, передають пакет у вказаний віддалений засіб і виявляють інформацію про азимут для забезпечення обертання пристрою всередині трубопроводу допоміжний засіб діагностики Нарешті, у патенті США 42925 89А, який слід розглядати як прототип заявленого винаходу, описані спосіб та пристрій для контролю труб, що передбачають використання генераторних засобів для генерації поля вихрових струмів всередині трубопроводу шляхом генерації перемінного магнітного поля вздовж труби та детекторний засіб для виявлення результуючого поля, що містить ряд обмоток з котушками та сигнальним процесором, що вимірює амплітуду та фазу сигналу, який характеризує дефект труби До недоліків цього рішення слід віднести неможливість його використання для контролю та випробування трубопроводів малого діаметру, які виготовлені як з чорних, так і кольорових металів Задача даного винаходу полягає в розробці вдосконаленого пристрою, який забезпечує випробування труб малого діаметра як з чорних, так і з кольорових металів на наявність дефектів ВІДПОВІДНО ДО винаходу, запропонований пристрій контролю трубопроводів, призначений для переміщення по трубопроводу і включаючий в себе генераторний засіб для генерації поля вихрових струмів всередині трубопроводу і детекторний засіб для виявлення результуючого поля, і ВІДМІННИЙ тим, що пристрій контролю виконаний з можливістю визначення наявності дефектів в трубо 44371 проводах як з чорних, так і з кольорових металів, причому детекторний засіб містить перший і другий приймачі, віддалені в подовжньому напрямі на будь-якій стороні від котушки збудження, що знаходиться в одному МІСЦІ і створює генераторний засіб, при цьому приймачі виконані з можливістю прийому інформації, що отримується від котушки збудження, в двох місцях, віддалених в подовжньому напрямі, на трубопроводі, причому інформація оновлюється, коли пристрій переміщається по трубопроводу, і передбачено комп'ютерний засіб для вибору частоти збудження котушки в залежності від характеру чорних або кольорових металів трубопроводу, що випробовується ВІДПОВІДНО ДО винаходу, запропонований також спосіб випробування трубопроводу з використанням пристрою контролю трубопроводів, що полягає в тому, що генерують вихровий струм в котушці у вказаному пристрої і виявляють вихровий струм, що індукується в СТІНЦІ трубопроводу, і який відрізняється тим, що включає етапи, на яких вибирають частоту збудження котушки в залежності від характеру трубопроводу з забезпеченням можливості випробування трубопроводів як із чорних, так і кольорових металів, виявляють вихровий струм, що індукується, в двох місцях, віддалених в подовжньому напрямі від котушки, розташованої в одному МІСЦІ між ними, і оновлюють інформацію, коли пристрій переміщається вздовж трубопроводу, для забезпечення визначення дефектів в трубопроводі Тепер винахід буде описаний на прикладі, причому фіг 1 зображає конкретний варіант здійснення засобу доставки для трубопроводу ВІДПОВІДНО ДО даного винаходу, фіг 2 більш детально зображає засоби управління і обробки даних, показані на фіг 1, фіг 3 зображає конфігурацію засобів зчитування зі пов'язаною з ними обробкою, і фіг 4 зображає алгоритм, пов'язаний з роботою системи Пристрій контролю трубопроводу, показаний на фіг 1, містить засіб доставки, що буксирується 10, показаний всередині труби 11, який можна буксирувати лебідкою (не показана) за допомогою троса 12 для забезпечення випробування труби, по якій він проходить Засіб доставки, що буксирується містить декілька зв'язаних пристроїв Вони включають в себе блок живлення 20 і ведучий процесорний модуль 21 і ведуче кільце 22 датчиків Котушка 24 генерує вихровий струм поля дистанційного управління, який виявляють за допомогою кільця 22 датчиків Котушка відділена від кільця 22 датчиків за допомогою віддільника 23 для ослаблення будь-якого поля, що безпосередньо передається, між котушкою 24 і датчиком 22 Також передбачене ведене кільце 25, відділене від котушки 24 ослабляючим ВІДДІЛЬНИКОМ 26 Кільце 25 датчиків сполучене з веденим процесорним модулем 27 Базова станція ЗО забезпечує канал зв'язку між засобом доставки 10 і комп'ютером 31 з можливістю ініціювання випробування і прийому результуючої інформації Кодер 32 відстані передбачений для генерування інформації про відстань, коли засіб доставки переміщається по трубопроводу Кодер відстані можна із зручністю встановлювати на барабані троса (не показаний), зв'язаному з лебідкою, таким чином, що коли засіб доставки буксирують, пройдена відстань безперервно оновлюється, а інформація про неї передається зворотно на базову станцію ЗО Пристрій виконаний з можливістю індукування вихрових струмів в стінку трубопроводу завдяки полю змінного струму, що генерується котушкою 24 Автори винаходу встановили, що такі вихрові струми можна використати в трубопроводах як з чорних, так і з кольорових металів (тобто магнітних і немагнітних), і що при наявності гладкої стінки труби забезпечується рівномірне ослаблення поля із збільшенням відстані Коли в поверхні присутня неоднорідність, викликана ПІТТІНГОМ, тріщинами і т д , в полі вихрових струмів, що виявляється, відбуваються зміни, що виявляються за допомогою датчиків 22 і 25 За рахунок використання двох наборів матриць датчиків підвищується здатність до встановлення точки дефекту Крім того, кожна матриця датчиків має по двадцять чотири датчики, так що можна провести в цілому 48 вимірювань для зчитування амплітуди і 48 вимірювань для зчитування фази, що охоплюють бічну поверхню труби Автори винаходу встановили, що шляхом проведення вимірювань фази в доповнення до вимірювань амплітуди можна визначати ВІДМІННОСТІ між внутрішніми і ЗОВНІШНІМИ дефекта ми стінки труби Інформація може проходити на базову станцію і з неї по 48 аналогових і 48 цифрових каналах Описаний пристрій може працювати всередині малих труб діаметром 101,6мм (4 дюйми) і менше і може копіювати структуру при наявності в трубопроводі колін, що мають діаметр закруглення 1,5 D Як правило, система може забезпечувати інтервал сканування 6мм при швидкості лебідки біля 6 метрів за хвилину У засіб доставки вбудований акселерометр по осях «х» і «у» для забезпечення інформації про орієнтацію, що посилається в комп'ютер, що викликається тим, що засіб доставки може, зокрема, обертатися під час його переміщення по трубопроводу Діапазон буксирування може становити декілька сотень метрів, забезпечуючи таким чином дуже корисний і економічно ефективний механізм контролю Інформація, що проходить в комп'ютер 31 через базову станцію ЗО, забезпечує визначення ряду параметрів з виявленої інформації Це може сприяти відображенню «в реальному масштабі часу» 1 амплітуди і фази, 2 азимута в діапазоні 0 - 360°, 3 швидкості Крім того, за допомогою комп'ютера можна обчислювати дефекти, включаючи розмір і положення дефектів Засіб доставки, показаний на фіг 1, буде мати електронні засоби управління з деякими вимогами до живлення і передачі даних, які детальніше показані на фіг 2 Вимоги до живлення засобу доставки приймаються по шині 35 і проходять в блок живлення 20 Вхідним сигналом може бути напруга 110В змінного струму, а вихідним сигналом блоку живлення 44371 буде напруга 150В постійного струму для задоволення потреб збудження котушки з використанням шини 33 Для електронних схем всередині засобу доставки буде доступна низька напруга постійного струму (наприклад, ± 5В) Зв'язок в обох напрямах між засобом доставки і базовою станцією буде здійснюватися через з'єднання ЗО Буде використовуватися ВІДПОВІДНИЙ протокол зв'язку (наприклад, RS232) Ведучий процесор 21 буде керуватися мікропроцесором і включати в себе канали передачі даних між ведучим вузлом 22 датчиків і веденим процесором для забезпечення синхронізації, а також управління 32 для збудження котушки ПОСЛІДОВНІ дані проходять між ведучим процесором 21 і датчиком 22 по шині 31 Дані проходять також між веденим процесором 27 і датчиком 25 по шині 34 Замість введення всіх вимог обробки у ведений і ведучий процесори 27 і 21, можна забезпечити узгодження і обробку сигналів всередині вузла датчиків, як показано на фіг 3 для ведучих датчиків 22 Тут спеціалізовані апаратні засоби збору даних (засоби 22d,e узгодження сигналів і мікроконтролер 22f) видають поліпшену шумову характеристику і зменшене навантаження обробки на процесор у ведучому модулі 21 і забезпечують прискорену попередню обробку Синхронізацією вибірки даних буде управляти опорний вхідний сигнал фази Частота вибірки буде залежати від вибраної частоти збудження Мікроконтролер буде реалізований у вигляді восьмирозрядного мікроконтролера з мінімальною пропускною спроможністю портів Послідовний інтерфейс за даними буде приймати стандартний протокол Канали будуть спареними, як показано, при цьому кожний мікропроцесор 22f підтримує два канали 22а, 22Ь датчиків зі зв'язаними з ними засобами 22d, 22e узгодження сигналів Повертаючись до фіг 2, зазначаємо, що єдина котушка збудження 24 забезпечує збудження по 8 ля, а датчики підтримуються в безпосередній близькості до стінки труби, причому датчики орієнтації по осях «х» і «у» в кожному вузлі 22, 25 датчиків компенсують обертання всередині труби і перекіс між двома вузлами датчиків Перед орієнтацією зчитують ідентифікацію засобу доставки і завантажують даний в файл калібрування в комп'ютері 31 Потім задають конфігурацію засобу доставки за допомогою комп'ютера для формування ряду каналів і вимог до адрес датчиків Крім того, задають струм в котушці, що задовольняє технологічним вимогам І нарешті, задають частоту збудження котушки Вона може знаходитися в межах діапазону 20Гц - 1 кГц і вибирається в залежності від матеріалу труби, що досліджується, оскільки випробовують трубопроводи як з чорних, так і з кольорових металів У процесі експлуатації засіб доставки буксирують по трубі, а коли це відбувається, кодер 32 відстані, показаний на фіг 1, буде видавати дані про пройдену відстань Для визначення дефектів в трубопроводі, команда сканування даних посилається з комп'ютера і приймається через базову станцію у ведучому контролері засобу доставки Ця інформація потім повторно передається ведучим контролером у ведений контролер Потім ЗДІЙСНЮЄТЬСЯ сканування в канали Ведений контролер посилає дані у ведучий контролер в пакетному форматі, а ведучий контролер приймає також дані з ведучих датчиків Ведучий контролер збирає дані, що включають в себе інформацію про амплітуду і фазу, і дані орієнтації від обох кілець датчиків і посилає їх в головний комп'ютер для відображення і обробки Алгоритм роботи типової системи показаний на фіг 4 Крім того, ведучий контролер синхронізує ведений і генерує сигнал збудження котушки, що збуджується Для гарантії синхронізації між ведучим і веденим контролером можна ввести компенсацію тимчасових затримок 10 27 Фіг. 1 10 44371 і* 1 послідовні дамі (ведучий модуль) чв'язок з засобом доставкм 32— 36— -~-.ff -І < ї-3-f (•праеління вузол дагчню» ??•—' котушкою 2 У20 блок живлення і збудження котушки котушки котушка, що збуджується t живлення транспортною засобу І 27 послідовні дат . (ведений) модуль вузол датчиків 34^ —25 Фіг. 2 котушка датчика 22вл /22 t засіб узгодження сигналів мікрої«оіттролар інтерфєї 22b -І котушха датчика засіб узгодження сигналів 2с шюрний сигнал фази Фіг. З Фіг. 4 ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна (044) 456 - 20 - 90
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01N 27/90
Мітки: випробування, спосіб, пристрій, трубопроводів, контролю
Код посилання
<a href="https://ua.patents.su/5-44371-sposib-viprobuvannya-truboprovodiv-i-pristrijj-dlya-kontrolyu-truboprovodiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб випробування трубопроводів і пристрій для контролю трубопроводів</a>
Пристрій для безтраншейної прокладки підземних трубопроводів
Номер патенту: 716
Опубліковано: 15.02.2001
Автори: Грігоращєнко Владімір Алєксандровіч, Соколов Павєл Алєксандровіч, Плавскіх Владімір Дмітрієвіч
МПК: E02F 5/16
Мітки: прокладки, трубопроводів, підземних, безтраншейної, пристрій
Формула / Реферат:
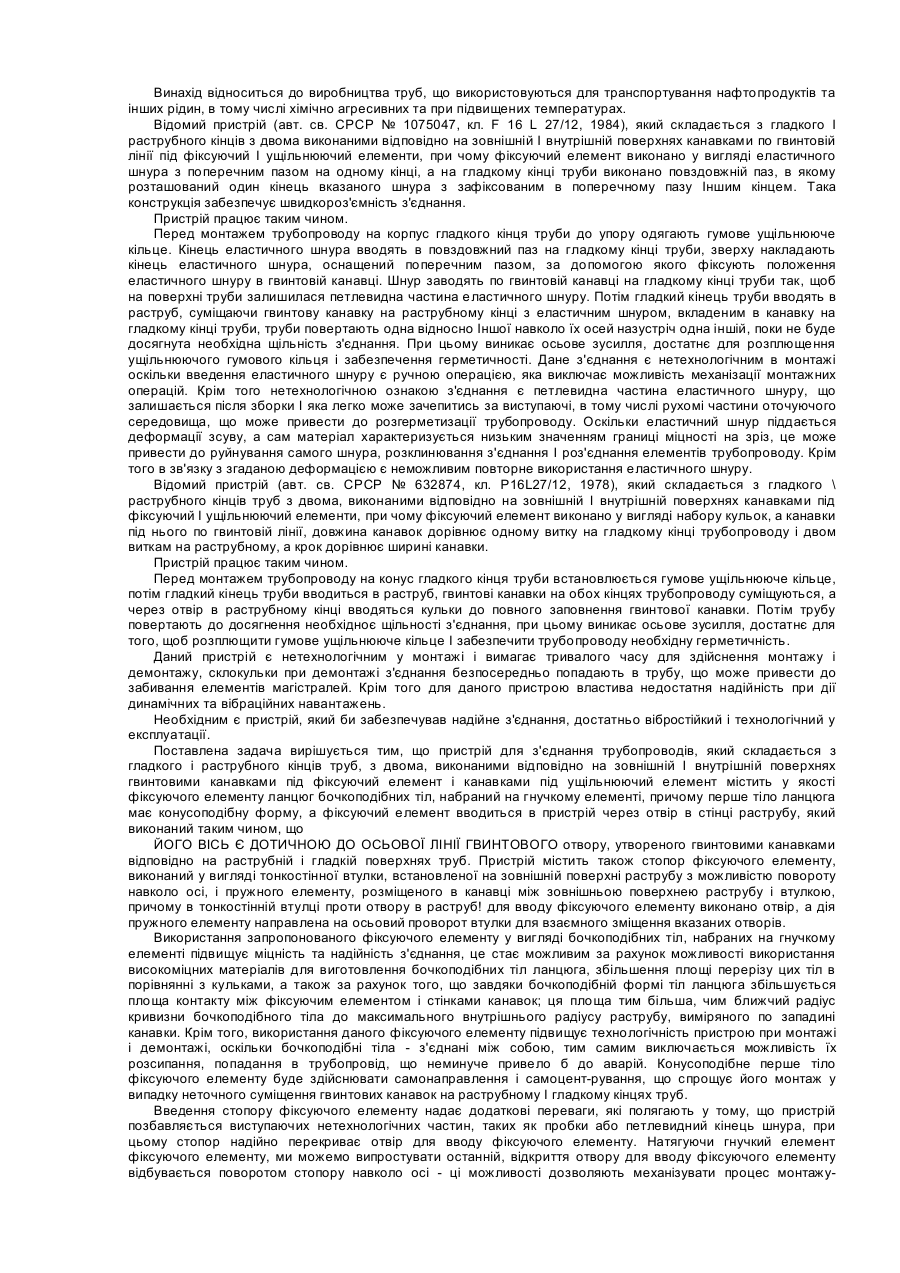
1. Пристрій для безтраншейної прокладки підземних трубопроводів, що включає пневмопробійник та засіб для кріплення до пневмопробійника трубопроводу, який відрізняється тим, що засіб для кріплення змонтований всередині хвостової частини пневмопробійника.2. Пристрій за п. 1, який відрізняється тим, що засіб для кріплення трубопроводу виконаний у вигляді двох нарізних патрубків з буртами на торцях і розміщеного між буртами пружного ...
Спосіб випробування виробів на віброміцність і пристрій для його здійснення
Номер патенту: 37880
Опубліковано: 15.05.2001
Автори: Павловський Михайло Антонович, Пузько Ігор Данилович, Хворост Володимир Андрійович
МПК: G01M 7/00
Мітки: здійснення, пристрій, віброміцність, виробів, спосіб, випробування
Текст:
...піка при U = U max. 3) Формують величини, що дорівнюють різницям Y1 = Yгранич-Yз авд і Y2 = Yгранич-Y max і фіксують величину Y3 = Y1 /Y2. 4) Формують величину, що дорівнює кореню квадратному з величини Y3 Y4 = Y3 = Y1 Y2 5) Величину Y4 помножують на величину Umax Uзавд = U max×Y4 4 37880 рувальним входом 55 блока 1 керування розгорткою частоти і першим керувальним входом комутатора 15. Другий вихід деши фратора 18 сполучений з...
Пристрій для з`єднання трубопроводів
Номер патенту: 17729
Опубліковано: 20.05.1997
Автори: Бурда Мирослав Йосипович, Порайко Юрій Іванович, Климишин Ярослав Данилович, Шостаківський Ігор Іванович
МПК: F16L 27/12
Мітки: з'єднання, трубопроводів, пристрій
Формула / Реферат:
Пристрій для з'єднання трубопроводів, що складається з гладкого І раструбного кінців труб, з двома, виконаними відповідно на зовнішній і внутрішній поверхнях гвинтовими канавками під фіксуючий елемент і канавкою під ущільнюючий елемент, який відрізняється тим, що фіксуючий елемент виконано у вигляді ланцюга бочкоподібних тіл, набраного на гнучкому елементі, причому фіксуючий елемент вводиться в пристрій через отвір, виконаний таким чином, що...
Пристрій кріплення трубопроводів
Номер патенту: 12878
Опубліковано: 28.02.1997
Автори: Афанасьєва Надія Петрівна, Креймер Діамара Вікторівна, Мерчанська Анна Василівна
МПК: F16L 3/12
Мітки: пристрій, кріплення, трубопроводів
Формула / Реферат:
(57) Устройство крепления трубопроводов на опорных поверхностях конструктивных элементов, содержащее хомуты с изогнутыми концами, охватывающими трубопроводы, элементы крепления, входящие в отверстия на хомуте и опорной поверхности, отличающееся тем, что хомуты установлены на соседних трубопроводах изогнутыми концами навстречу друг другу, при этом второй конец каждого хомута соединен с соседним трубопроводом.
Спосіб динамічного випробування давачів тиску при термодинамічному впливі та пристрій для його здійснення
Номер патенту: 30887
Опубліковано: 15.12.2000
Автор: Тихан Мирослав Олексійович
МПК: G01L 27/00
Мітки: пристрій, здійснення, тиску, спосіб, термодинамічному, динамічного, випробування, впливі, давачів
Текст:
...Швидкість проникнення рідини у вільну герметичну камеру можна оцінити за формулою Торіччелі v2 = R [s] × (1 - n ) - aEDT = h (1 - n ) × (0,666 × DP ) пояснюється тим, що у цьому випадку внутрішнє напруження у мембрані досягнуть критичного значення і наступить її руйнування. Дійсно, якщо жорстко закріплена кругла мембрана піддається дії різниці тиску DР, то на її поверхні виникають напруження, які визначаються залежністю [2] 2 DP r де r...
Попередній патент: Фармацевтична композиція, що інгібує віл-1 зворотну транскриптазу
Наступний патент: Шихта для одержання муліто-кремнеземистого шамоту
Випадковий патент: Інфільтраційна система