Спосіб управління тайм-аутом повторної передачі в телекомунікаційній мережі
Номер патенту: 48463
Опубліковано: 25.03.2010
Автори: Рвачова Наталія Володимирівна, Польщиков Костянтин Олександрович, Чевардін Владислав Євгенійович

Формула / Реферат
Спосіб управління тайм-аутом повторної передачі в телекомунікаційній мережі, що полягає у тому, що при одержанні джерелом підтвердження доставки адресатові сегмента фіксується виміряне значення часу очікування цього підтвердження, це значення разом з виміряними значеннями часу очікування двох попередніх підтверджень як вхідні змінні подаються до нейро-нечіткого регулятора, в якому шляхом послідовного виконання процедур нечіткого виводу (фазифікації, агрегування, активізації та дефазифікації) здійснюється прогнозування часу очікування підтвердження чергового сегмента, що підлягає відправці, при цьому параметри функцій приналежності вхідних змінних нечітким множинам і значення індивідуальних висновків правил нечіткого виводу налаштовуються виконанням процедури нейронного самонавчання, у момент відправки джерелом чергового сегмента здійснюється відлік шуканого значення тайм-ауту повторної передачі, що обчислюється як добуток числа 1,05 і прогнозованого часу очікування відповідного підтвердження, який відрізняється тим, що управління тайм-аутом повторної передачі здійснюється на основі прогнозування часу очікування чергового підтвердження за допомогою нейро-нечіткого регулятора.
Текст
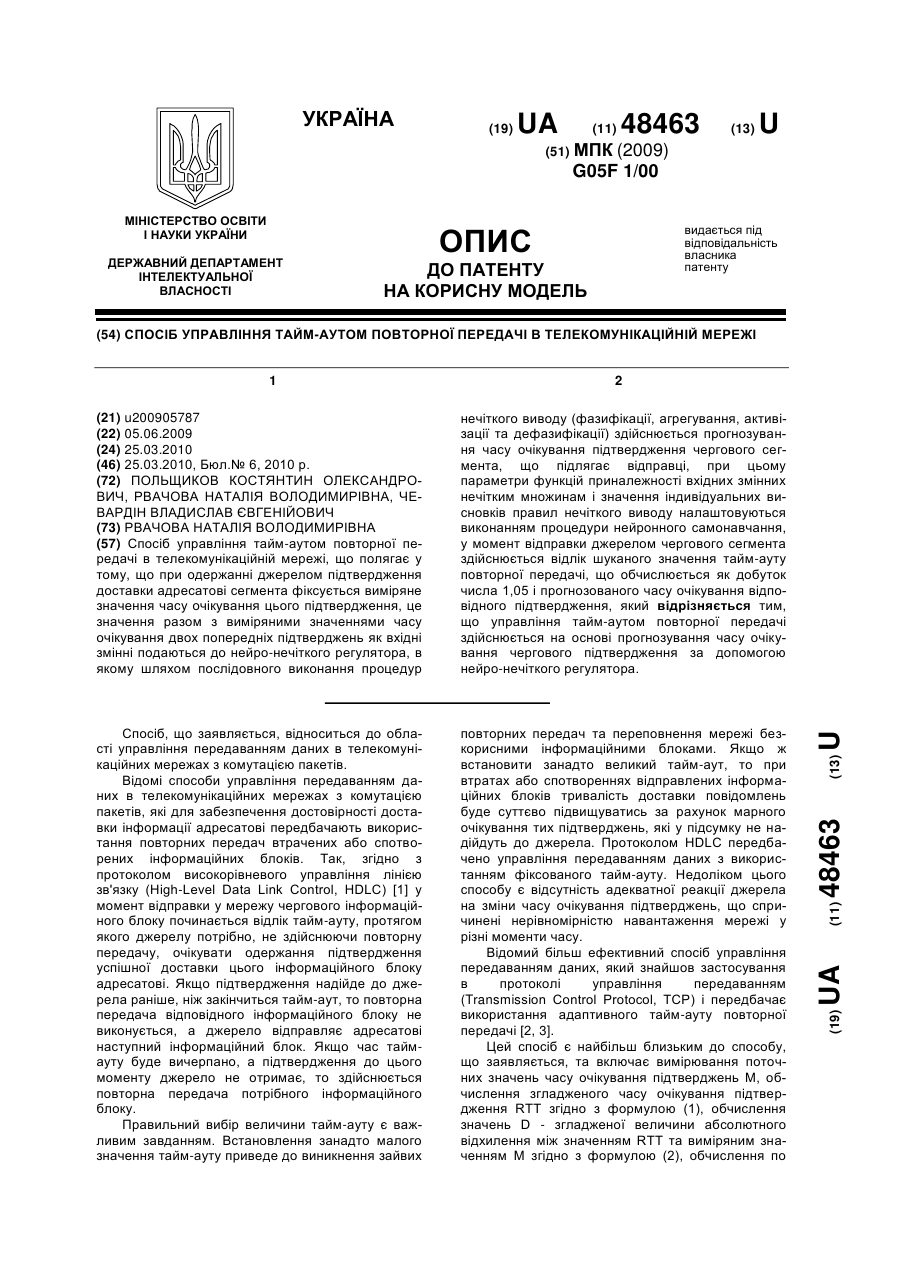
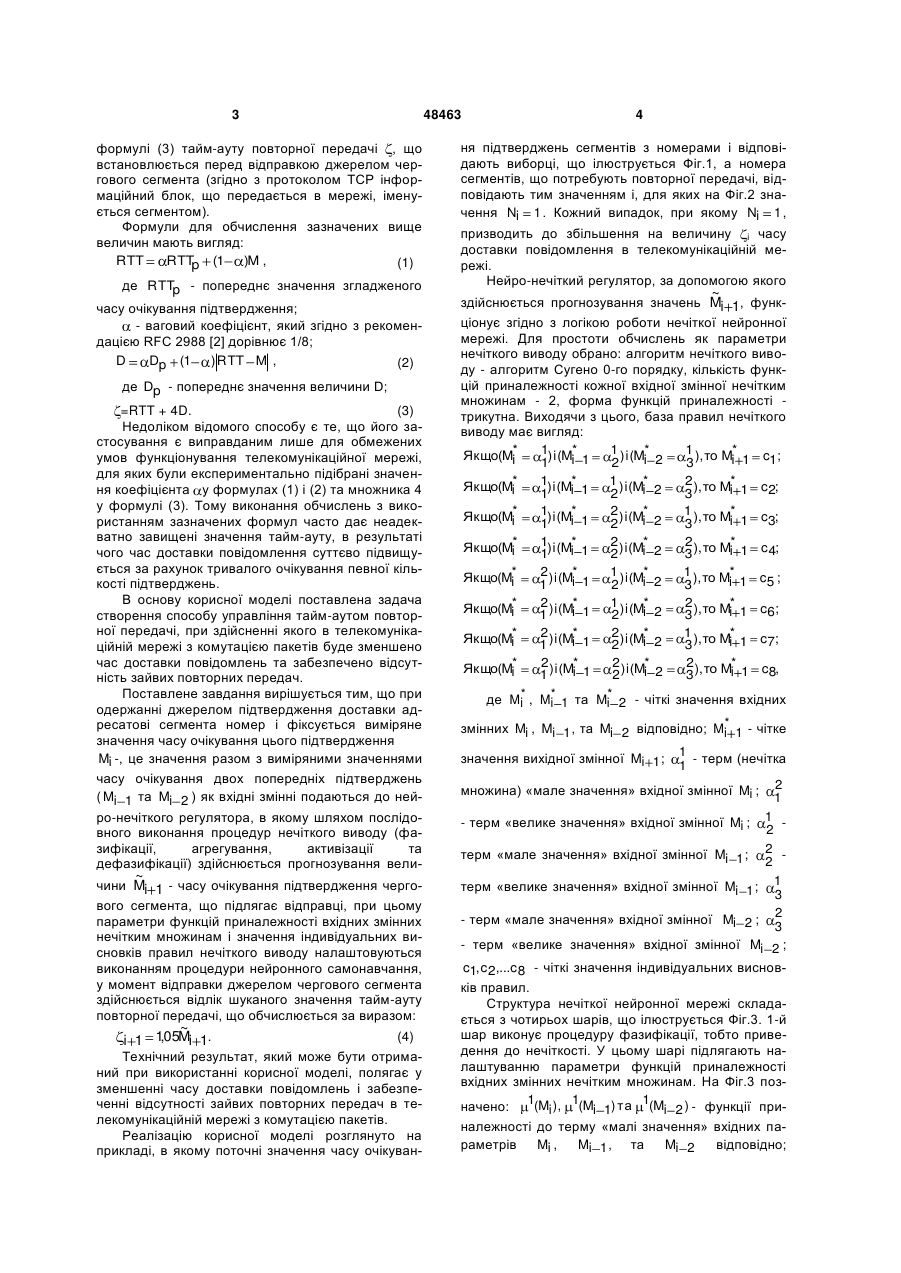
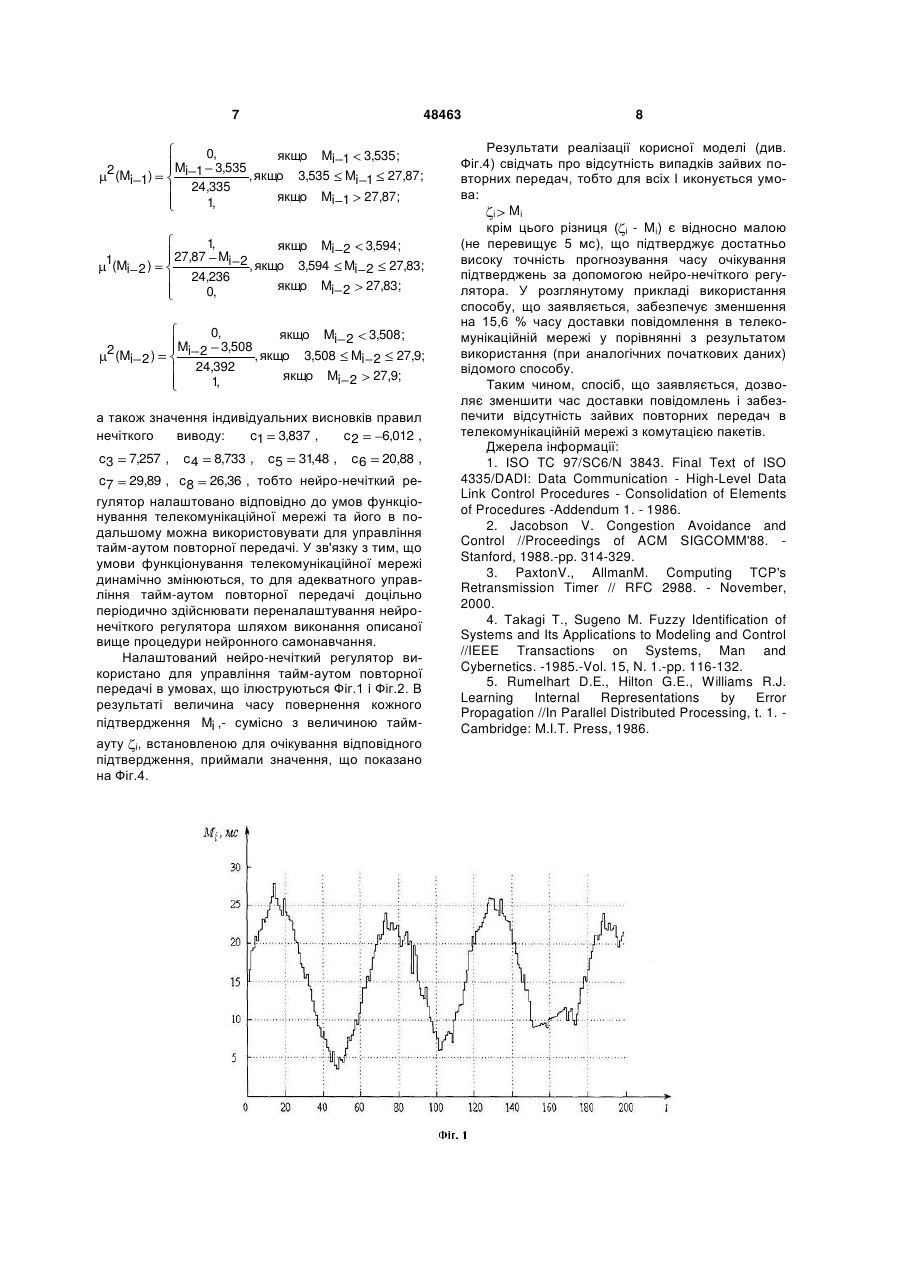
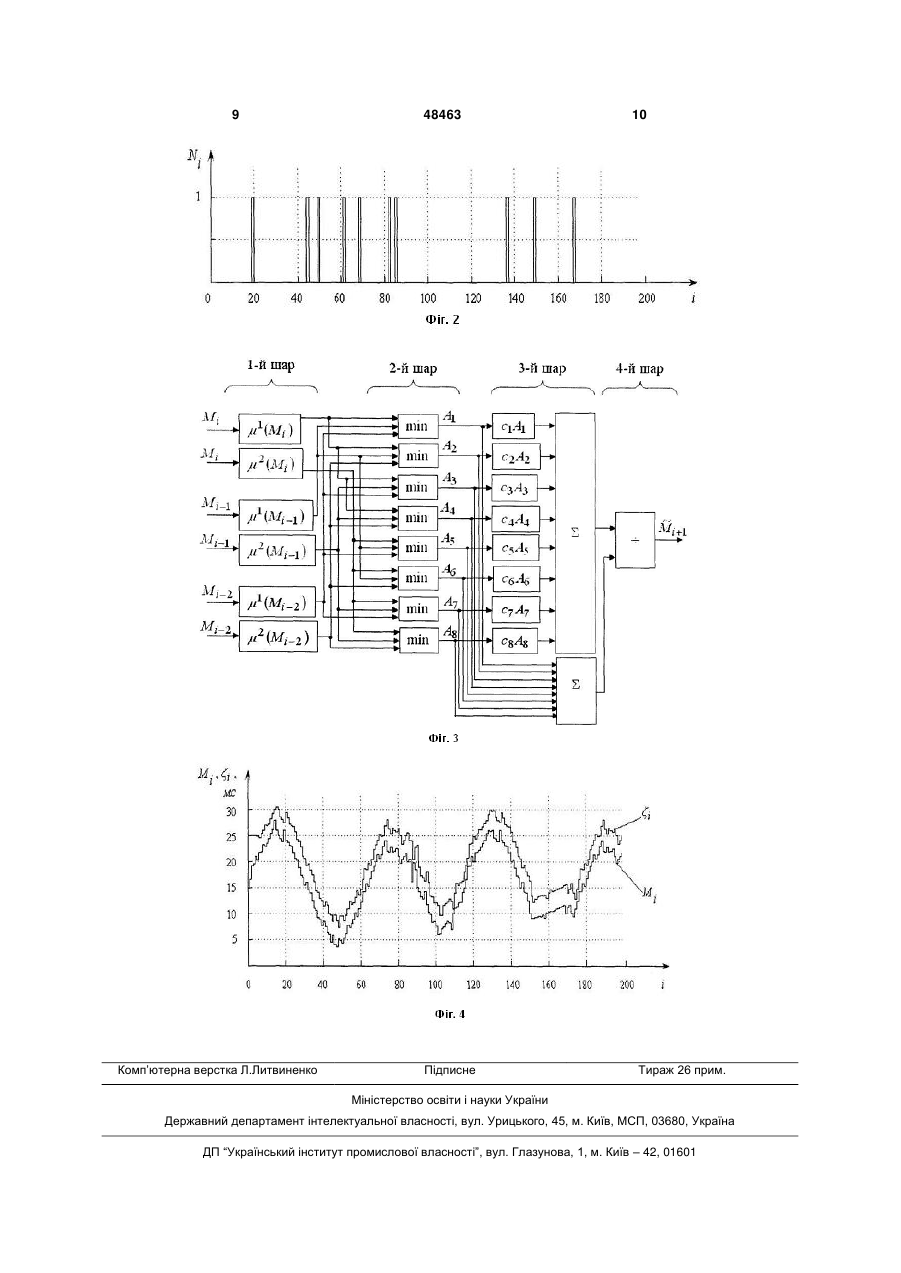
Спосіб управління тайм-аутом повторної передачі в телекомунікаційній мережі, що полягає у тому, що при одержанні джерелом підтвердження доставки адресатові сегмента фіксується виміряне значення часу очікування цього підтвердження, це значення разом з виміряними значеннями часу очікування двох попередніх підтверджень як вхідні змінні подаються до нейро-нечіткого регулятора, в якому шляхом послідовного виконання процедур 3 формулі (3) тайм-ауту повторної передачі , що встановлюється перед відправкою джерелом чергового сегмента (згідно з протоколом TCP інформаційний блок, що передається в мережі, іменується сегментом). Формули для обчислення зазначених вище величин мають вигляд: RTT RTT (1 )M , (1) p де RTTp - попереднє значення згладженого часу очікування підтвердження; - ваговий коефіцієнт, який згідно з рекомендацією RFC 2988 [2] дорівнює 1/8; D Dp (1 ) RTT M , (2) де Dp - попереднє значення величини D; (3) =RTT + 4D. Недоліком відомого способу є те, що його застосування є виправданим лише для обмежених умов функціонування телекомунікаційної мережі, для яких були експериментально підібрані значення коефіцієнта у формулах (1) і (2) та множника 4 у формулі (3). Тому виконання обчислень з використанням зазначених формул часто дає неадекватно завищені значення тайм-ауту, в результаті чого час доставки повідомлення суттєво підвищується за рахунок тривалого очікування певної кількості підтверджень. В основу корисної моделі поставлена задача створення способу управління тайм-аутом повторної передачі, при здійсненні якого в телекомунікаційній мережі з комутацією пакетів буде зменшено час доставки повідомлень та забезпечено відсутність зайвих повторних передач. Поставлене завдання вирішується тим, що при одержанні джерелом підтвердження доставки адресатові сегмента номер i фіксується виміряне значення часу очікування цього підтвердження Mi -, це значення разом з виміряними значеннями часу очікування двох попередніх підтверджень ( Mi 1 та Mi 2 ) як вхідні змінні подаються до нейро-нечіткого регулятора, в якому шляхом послідовного виконання процедур нечіткого виводу (фазифікації, агрегування, активізації та дефазифікації) здійснюється прогнозування вели~ чини Mi 1 - часу очікування підтвердження чергового сегмента, що підлягає відправці, при цьому параметри функцій приналежності вхідних змінних нечітким множинам і значення індивідуальних висновків правил нечіткого виводу налаштовуються виконанням процедури нейронного самонавчання, у момент відправки джерелом чергового сегмента здійснюється відлік шуканого значення тайм-ауту повторної передачі, що обчислюється за виразом: ~ (4) , i 1 105Mi 1. Технічний результат, який може бути отриманий при використанні корисної моделі, полягає у зменшенні часу доставки повідомлень і забезпеченні відсутності зайвих повторних передач в телекомунікаційній мережі з комутацією пакетів. Реалізацію корисної моделі розглянуто на прикладі, в якому поточні значення часу очікуван 48463 4 ня підтверджень сегментів з номерами i відповідають виборці, що ілюструється Фіг.1, а номера сегментів, що потребують повторної передачі, відповідають тим значенням і, для яких на Фіг.2 значення Ni 1 . Кожний випадок, при якому Ni 1 , призводить до збільшення на величину i часу доставки повідомлення в телекомунікаційній мережі. Нейро-нечіткий регулятор, за допомогою якого ~ здійснюється прогнозування значень Mi 1, функціонує згідно з логікою роботи нечіткої нейронної мережі. Для простоти обчислень як параметри нечіткого виводу обрано: алгоритм нечіткого виводу - алгоритм Сугено 0-го порядку, кількість функцій приналежності кожної вхідної змінної нечітким множинам - 2, форма функцій приналежності трикутна. Виходячи з цього, база правил нечіткого виводу має вигляд: 1) i (M* 1 ) i (M* 1 ), то M* Якщо(Mi* i 1 i 2 i 1 c1; 1 2 3 * 1) i (M* 1 ) i (M* 2 ), то M* Якщо(Mi i 1 i 2 i 1 c2; 1 2 3 * 1) i (M* 2 ) i (M* 1 ), то M* Якщо(Mi i 1 i 2 i 1 c3; 1 2 3 * 1) i (M* 2 ) i (M* 2 ), то M* Якщо(Mi i 1 i 2 i 1 c 4; 1 2 3 2 ) i (M* 1 ) i (M* 1 ), то M* Якщо(Mi* i 1 i 2 i 1 c5 ; 1 2 3 * 2 ) i (M* 1 ) i (M* 2 ), то M* Якщо(Mi i 1 i 2 i 1 c6; 1 2 3 * 2 ) i (M* 2 ) i (M* 1 ), то M* Якщо(Mi i 1 i 2 i 1 c7; 1 2 3 * 2 ) i (M* 2 ) i (M* 2 ), то M* Якщо(Mi i 1 i 2 i 1 c8, 1 2 3 де Mi* , Mi* 1 та Mi* 2 - чіткі значення вхідних змінних Mi , Mi 1 , та Mi 2 відповідно; Mi* 1 - чітке значення вихідної змінної Mi 1; 1 - терм (нечітка 1 множина) «мале значення» вхідної змінної Mi ; 2 1 1 - терм «велике значення» вхідної змінної Mi ; 2 2 терм «мале значення» вхідної змінної Mi 1 ; 2 терм «велике значення» вхідної змінної Mi 1 ; 1 3 - терм «мале значення» вхідної змінної Mi 2 ; 2 3 - терм «велике значення» вхідної змінної Mi 2 ; c1, c 2,...c8 - чіткі значення індивідуальних висновків правил. Структура нечіткої нейронної мережі складається з чотирьох шарів, що ілюструється Фіг.3. 1-й шар виконує процедуру фазифікації, тобто приведення до нечіткості. У цьому шарі підлягають налаштуванню параметри функцій приналежності вхідних змінних нечітким множинам. На Фіг.3 позначено: 1(Mi ), 1(Mi 1) та 1(Mi 2 ) - функції приналежності до терму «малі значення» вхідних паMi , Mi 1 , та Mi 2 раметрів відповідно; 5 2 (M ), 2 (M ) та 2 (M ) - функції приналежi i 1 i 2 ності до терму «великі значення» вхідних параметрів Mi , Mi 1 , та Mi 2 відповідно. 2-м шаром нечіткої нейронної мережі виконується процедура агрегування, тобто обчислення значень ступеня істинності умов ( A1, A 2,..., A 8 ) по кожному правилу нечіткого виводу: 1(M* ) 1(M* ) 1(M* ) A1 i i 1 i 2 1(M* ) 1(M* ) 2 (M* ) A2 i i 1 i 2 1(M* ) 2 (M* ) 1(M* ) A3 i i 1 i 2 1(M* ) 2(M* ) 2(M* ) A4 i i 1 i 2 2 (M* ) 1(M* ) 1(M* ) A5 i i 1 i 2 2(M* ) 1(M* ) 2(M* ) A6 i i 1 i 2 2(M* ) 2(M* ) 1(M* ) A7 i i 1 i 2 2 (M* ) 2 (M* ) 2 (M* ) A8 i i 1 i 2 де - позначення операції логічного мінімуму. У даному прикладі 2-й шар не має параметрів, що потребують налаштування. У 3-му шарі обчислюється сума та зважена сума вихідних сигналів 2-го шару. При цьому підлягають налаштуванню параметри c1, c 2,...c8 , - індивідуальні висновки правил нечіткого виводу, визначення яких є результатом виконання процедури активізації. 4-й шар не містить параметрів, що підлягають налаштуванню. Він реалізує операцію ділення вихідних сигналів 3-го шару, тим самим визначає результат процедури дефазифікації, суть якої є у обчисленні чіткого значення вихідної змінної, що згідно з алгоритмом Сугено 0-го порядку виконується за таким виразом [4]: 8 ck Ak ~ k 1 Mi 1 . 8 Ak k 1 Шляхом налаштування параметрів функцій приналежності вхідних змінних нечітким множинам і значень індивідуальних висновків правил нечіткого виводу нечітку нейронну мережу потрібно навчити відтворювати залежність Mi 1 f (Mi, Mi 1, Mi 2 ) . Для цього було використано одержані у минулому значення M1, M2,..., M100 (див. Фіг.1). Потім сформовано дані для нейронного самонавчання у вигляді матриці, що містить 97 рядків: M3 M2 M1 M4 M4 M3 M2 M5 . (5) M99 M98 M97 M100 Для налаштування необхідних параметрів нечіткого виводу було обрано найбільш поширений алгоритм навчання нейронних мереж - алгоритм 48463 6 зворотного розповсюдження помилки [5], згідно з яким виконується наступне: [0, 1] , обираються 1) задається параметр близькими до нуля початкові значення ваг w (k,I) ' j ( j -а вага k -го нейрона в I -у шарі), а також задається величина Emax - максимальне значення сумарної функції похибок; 2) встановлюється l 1 - номер рядка матриці (5) та E 0 - поточне значення сумарної функції похибок; 3) як дані для навчання вводиться рядок номер l матриці (5), обчислюється вихідний сигнал ~ нечіткої нейронної мережі M(l) ; i 1 4) здійснюється корекція ваг за формулою: (l) ( , W (I) WpI) ( WpI) де W (I) - матриця ваг 7-го шару нечіткої ней( ронної мережі; WpI) - матриця ваг I -го шару, яку одержано в результаті попередньої корекції; (l) - матриця, елементами якої є часткові похі( WpI) дні (l) ; при цьому корекція ваг здійснюється W (k,I) j від останніх шарів до початкових, тобто I початку приймає значення 3, а потім значення 1; 5) збільшується поточне значення сумарної функції похибок: 2 ~ E Ep 0,5 M(l) M(l) i 1 i 1 де Ep - попереднє значення сумарної функції похибок; 6) якщо l 97 , то l збільшується на 1 та здійснюється перехід до п. 3; 7) якщо max , то здійснюється перехід до п. 2; 8) кінець. В результаті нейронного самонавчання одержано функції риналежності для вхідних змінних: 1(M ) i 1, якщо Mi 3,75; 26,74 Mi , якщо 3,75 Mi 26,74; 22,99 якщо Mi 26,74; 0, 2 (M ) i 0, якщо Mi 3,63; Mi 3,63 , якщо 3,63 Mi 28,3; 24,67 якщо Mi 28,3; 1, 1(M ) i 1 1, якщо Mi 1 3,566; 27,57 Mi 1 , якщо 3,75 Mi 1 27,57; 23,82 якщо Mi 1 27,57; 0, 7 48463 2 (M ) i 1 0, якщо Mi 1 3,535; Mi 1 3,535 , якщо 3,535 Mi 1 27,87; 24,335 якщо Mi 1 27,87; 1, 1(M ) i 2 1, якщо Mi 2 3,594; 27,87 Mi 2 , якщо 3,594 Mi 2 27,83; 24,236 якщо Mi 2 27,83; 0, 2 (M ) i 2 0, якщо Mi 2 3,508; Mi 2 3,508 , якщо 3,508 Mi 2 27,9; 24,392 якщо Mi 2 27,9; 1, а також значення індивідуальних висновків правил нечіткого виводу: c1 3,837 , c2 6,012 , c3 7,257 , c4 8,733 , c5 31,48 , c6 20,88 , c7 29,89 , c8 26,36 , тобто нейро-нечіткий регулятор налаштовано відповідно до умов функціонування телекомунікаційної мережі та його в подальшому можна використовувати для управління тайм-аутом повторної передачі. У зв'язку з тим, що умови функціонування телекомунікаційної мережі динамічно змінюються, то для адекватного управління тайм-аутом повторної передачі доцільно періодично здійснювати переналаштування нейронечіткого регулятора шляхом виконання описаної вище процедури нейронного самонавчання. Налаштований нейро-нечіткий регулятор використано для управління тайм-аутом повторної передачі в умовах, що ілюструються Фіг.1 і Фіг.2. В результаті величина часу повернення кожного підтвердження Mi ,- сумісно з величиною тайм ауту i, встановленою для очікування відповідного підтвердження, приймали значення, що показано на Фіг.4. 8 Результати реалізації корисної моделі (див. Фіг.4) свідчать про відсутність випадків зайвих повторних передач, тобто для всіх I иконується умова: Mi i крім цього різниця ( i - Mi) є відносно малою (не перевищує 5 мс), що підтверджує достатньо високу точність прогнозування часу очікування підтверджень за допомогою нейро-нечіткого регулятора. У розглянутому прикладі використання способу, що заявляється, забезпечує зменшення на 15,6 % часу доставки повідомлення в телекомунікаційній мережі у порівнянні з результатом використання (при аналогічних початкових даних) відомого способу. Таким чином, спосіб, що заявляється, дозволяє зменшити час доставки повідомлень і забезпечити відсутність зайвих повторних передач в телекомунікаційній мережі з комутацією пакетів. Джерела інформації: 1. ISO TC 97/SC6/N 3843. Final Text of ISO 4335/DADI: Data Communication - High-Level Data Link Control Procedures - Consolidation of Elements of Procedures -Addendum 1. - 1986. 2. Jacobson V. Congestion Avoidance and Control //Proceedings of ACM SIGCOMM'88. Stanford, 1988.-pp. 314-329. 3. PaxtonV., AllmanM. Computing TCP's Retransmission Timer // RFC 2988. - November, 2000. 4. Takagi Т., Sugeno M. Fuzzy Identification of Systems and Its Applications to Modeling and Control //IEEE Transactions on Systems, Man and Cybernetics. -1985.-Vol. 15, N. 1.-pp. 116-132. 5. Rumelhart D.E., Hilton G.E., Williams R.J. Learning Internal Representations by Error Propagation //In Parallel Distributed Processing, t. 1. Cambridge: M.I.T. Press, 1986. 9 Комп’ютерна верстка Л.Литвиненко 48463 Підписне 10 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for timeout retransmitting control in telecommunications networks
Автори англійськоюPolschykov Kostiantyn Oleksandrovych, Rvachova Nataliia Volodymyrivna, Chevardin Vladyslav Yevhenovych
Назва патенту російськоюСпособ управления тайм-аутом повторной передачи в телекоммуникационной сети
Автори російськоюПольщиков Константин Александрович, Рвачова Наталия Владимировна, Чевардин Владислав Евгеньевич
МПК / Мітки
МПК: G05F 1/00
Мітки: мережі, спосіб, телекомунікаційній, повторної, тайм-аутом, управління, передачі
Код посилання
<a href="https://ua.patents.su/5-48463-sposib-upravlinnya-tajjm-autom-povtorno-peredachi-v-telekomunikacijjnijj-merezhi.html" target="_blank" rel="follow" title="База патентів України">Спосіб управління тайм-аутом повторної передачі в телекомунікаційній мережі</a>
Спосіб управління трафіком в мультисервісній телекомунікаційній мережі
Номер патенту: 47461
Опубліковано: 10.02.2010
Автори: Лемешко Олександр Віталійович, Васюта Костянтин Станіславович, Добришкін Юрій Миколайович, Симоненко Олександр Вікторович
МПК: H04L 12/56
Мітки: спосіб, мережі, телекомунікаційній, управління, трафіком, мультисервісний
Формула / Реферат:
Спосіб управління трафіком у мультисервісній телекомунікаційній мережі (ТКМ), який полягає в тому, що записи таблиць маршрутизації на вузлах мережі формуються шляхом розв'язання оптимізаційної задачі щодо мінімізації лінійної цільової функції при виконанні умов збереження потоку та умов відсутності перевантаження, який відрізняється тим, що зміст маршрутних таблиць на приграничних вузлах мультисервісної ТКМ визначається в результаті...
Спосіб автоматизованої передачі даних при здійсненні дзвінка в телекомунікаційній мережі, при якому замість гудка виклику стороні, що ініціює дзвінок, програються гороскопи сторони, що приймає дзвінок
Номер патенту: 43483
Опубліковано: 25.08.2009
Автор: Морозюк Роман Володимирович
МПК: G06F 17/00, G06F 19/00
Мітки: здійсненні, гороскопи, якому, приймає, програються, гудка, дзвінок, автоматизованої, замість, мережі, передачі, стороні, телекомунікаційній, дзвінка, виклику, ініціює, спосіб, даних
Формула / Реферат:
Спосіб автоматизованої передачі і обробки даних при здійсненні дзвінка в телекомунікаційну мережу стільникового та/або фіксованого зв'язку, в якому за допомогою спеціалізованої електронної системи на базі як мінімум одної центральної електронно-обчислювальної машини, що поєднана з телекомунікаційною мережею, призначеної для забезпечення додаткових функцій комутації дзвінка, замінюється стандартний гудок виклику, що чує сторона, яка є...
Спосіб керування навантаженням у телекомунікаційній мережі з спільноканальною сигналізацією
Номер патенту: 5289
Опубліковано: 15.02.2005
Автори: Лисогор Володимир Григорович, Батранін Андрій Володимирович, Буняк Юрій Анатолійович, Скидан Юрій Анатолійович
МПК: H04M 1/24, H04M 7/06, H04M 3/42, H04M 3/22
Мітки: спосіб, керування, навантаженням, телекомунікаційній, спільноканальною, сигналізацією, мережі
Формула / Реферат:
Спосіб керування навантаженням у телекомунікаційній мережі з спільноканальною сигналізацією, який полягає в тому, що фільтр-ретранслятор вмикають в розриві контрольованої ланки сигналізації, дані передають з однієї сторони розриву до іншої і по заданих параметрах фільтрують повідомлення про запити на послуги, і відфільтровані повідомлення для подальшої передачі забороняють, який відрізняється тим, що відфільтровані повідомлення протоколів...
Спосіб формування трас інформаційного потоку в телекомунікаційній транспортній мережі
Номер патенту: 14915
Опубліковано: 15.06.2006
Автори: Костік Богдан Ярославович, Головцева Наталія Вікторівна, Дубінін Георгій Олександрович, Коршун Євгеній Іванович, Каріченський Олександр Володимирович, Киселевський Олександр Георгійович
МПК: H04Q 11/00, H04Q 9/00
Мітки: мережі, транспортний, трас, потоку, телекомунікаційній, формування, спосіб, інформаційного
Формула / Реферат:
Спосіб формування трас інформаційного потоку в телекомунікаційній транспортній мережі, що включає створення за допомогою устаткування телекомунікаційної транспортної мережі траси для направлення інформаційного потоку та його направлення по мережі, який відрізняється тим, що з устаткування первинних мереж створюють автоматизовану телекомунікаційну транспортну мережу, ґрунтуючись на фізичних зв'язках між вузлами мережі, за допомогою...
Спосіб передачі та прийому команд управління по проводах трифазної мережі соколова в.ф.
Номер патенту: 1080
Опубліковано: 30.12.1993
Автор: Соколов Вячеслав Федорович
МПК: G08C 19/02
Мітки: спосіб, проводах, соколова, управління, трифазної, передачі, в.ф, команд, прийому, мережі
Формула / Реферат:
Ф о р м у л а и з о б р е т е н и я Способ передачи и приема команд управления по проводам трехфазной сети, основанный на формировании команды управления из сигнала заданной полуволны напряжения переменного тока в одном из фазных проводов трехфазной сети, передаче команды управления по одному из фазных проводов трехфазной сети, приеме команды управления и преобразовании ее в сигнал управления исполнительным элементом, о т л и ч а ю щ...
Попередній патент: Пристрій для формування будівельних виробів
Наступний патент: Спосіб підвищення поживної цінності соняшникового шроту
Випадковий патент: Флокулянт "лт флок-а"