Гібридний спосіб визначення стану вузлів комутаційної матриці пристроїв вводу інформації
Номер патенту: 49141
Опубліковано: 17.02.2003
Автори: Черкаський Сергій Юрійович, Лобок Георгій Олександрович, Логвиненко Юрій Павлович
Формула / Реферат
1. Гібридний спосіб визначення стану комутаційної матриці пристрою вводу інформації, який відрізняється тим, що динамічне сканування виконують контролером обробки клавіатури тільки для деякої частини подвійних і більш кратних одночасних натискань клавіш, з зменшеною на порядок амплітудою сканувальних імпульсів і тільки по необхідних провідниках комутаційної матриці, а в усіх інших випадках реалізують статичне визначення координат замкнених одноточкових вузлів плівкової комутаційної матриці за рахунок формувача стану комутаційної матриці, перші входи якого, що з'єднані з вертикальними провідниками комутаційної матриці, є його першими виходами і з'єднані з першим портом вводу-виводу контролера обробки, другі входи з’єднані з горизонтальними провідниками комутаційної матриці, другі виходи - з другим портом вводу контролера обробки, а третій вихід - з входом інтерфейсу вводу-виводу контролера обробки клавіатури.
2. Спосіб за п. 1, який відрізняється тим, що динамічне сканування виконують тільки за умови, коли замкненими є два і більше вертикальних провідників з двома і більше горизонтальними провідниками комутаційної матриці.
Текст
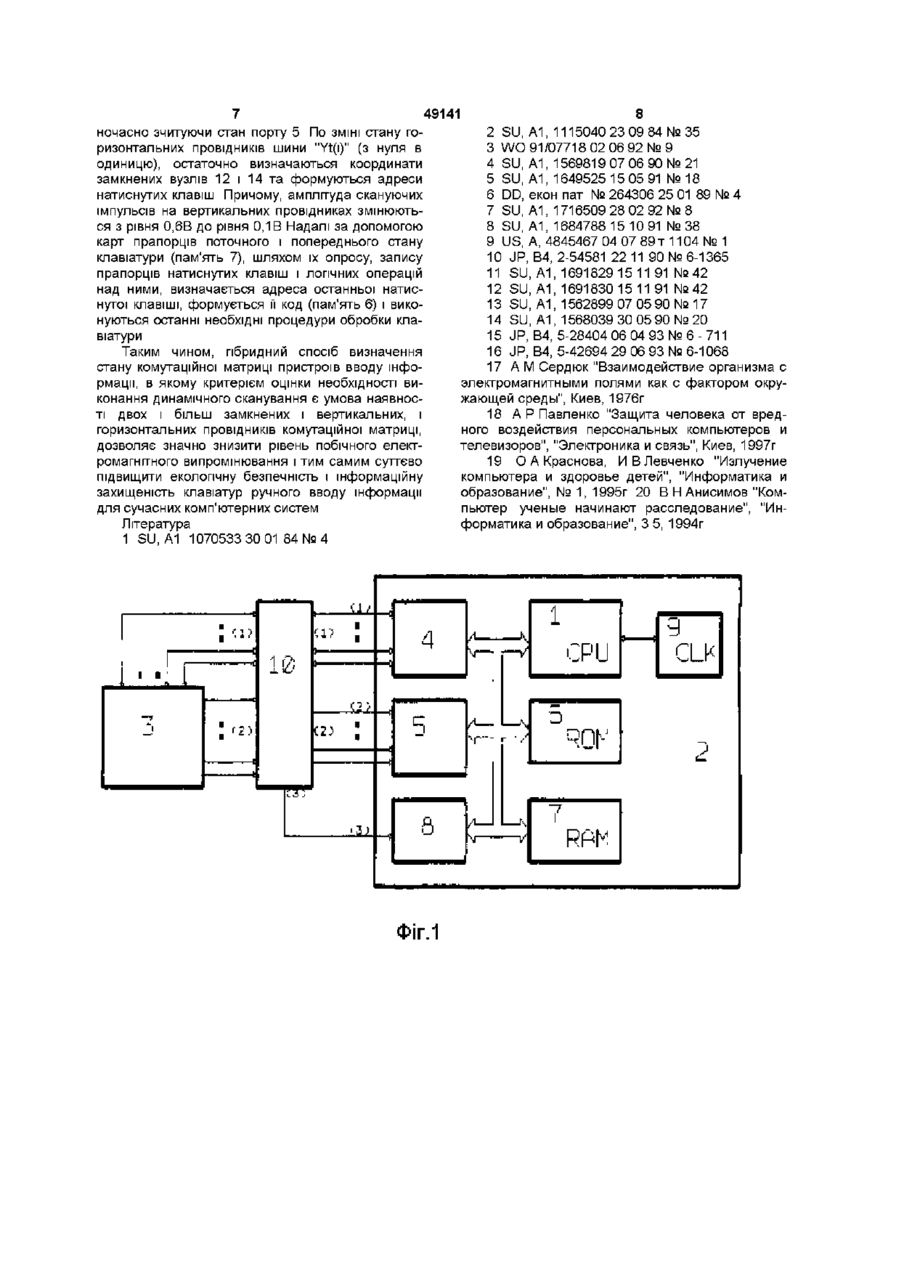
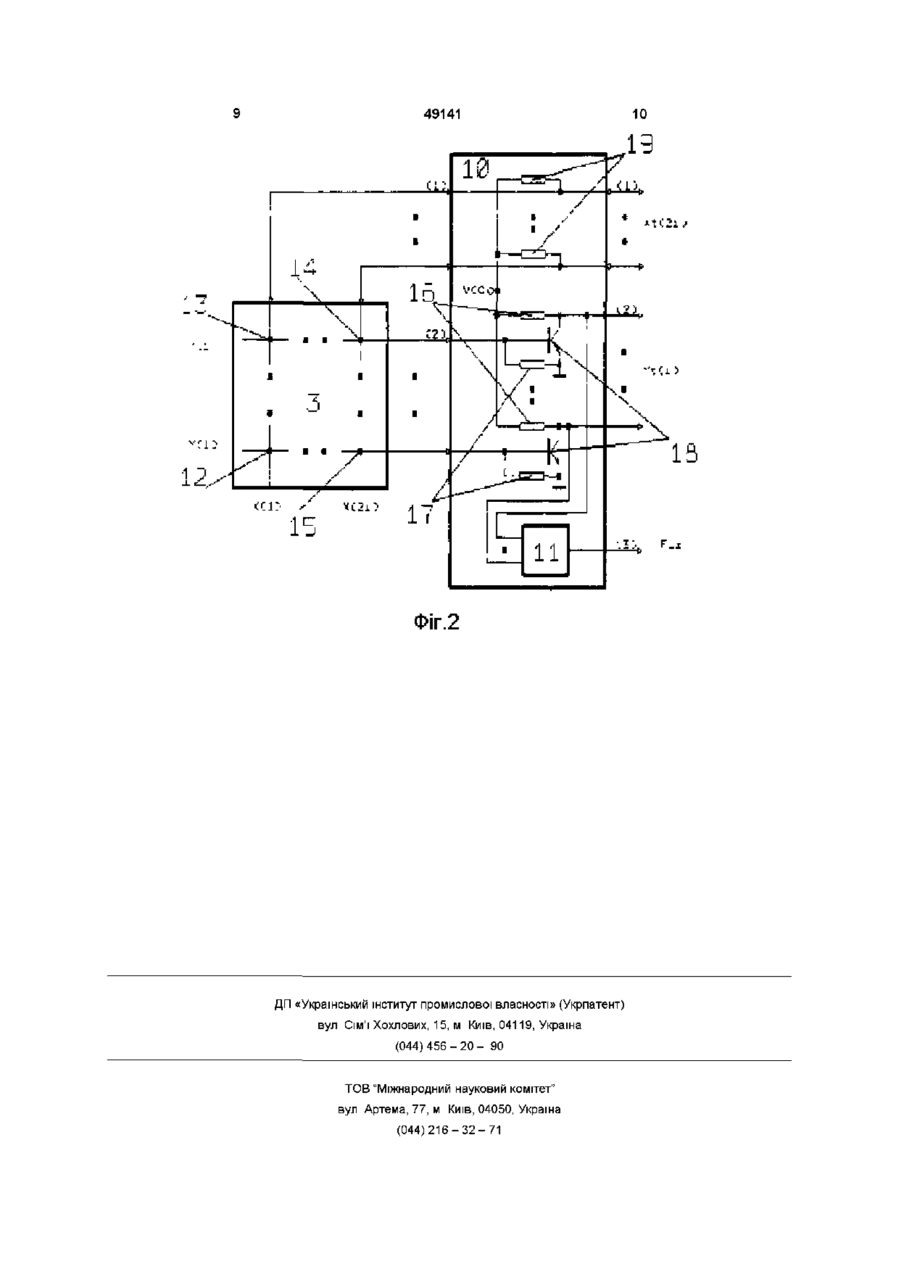
1 Гібридний спосіб визначення стану комутаційної матриці пристрою вводу інформації, який відрізняється тим, що динамічне сканування виконують контролером обробки тільки для деякої частини подвійних і більш кратних одночасних натискань клавіш, з зменшеною на порядок амплітудою скануючих імпульсів і тільки по необхідних провідниках комутаційної матриці, а в усіх інших випадках реалізують статичне визначення коорди Цей винахід слід віднести до способу побудови засобів вводу інформації в обчислювальній техніці, зокрема, пристроїв ручного вводу інформації, і може бути використаний в персональних комп'ютерах, в автоматизованих системах обробки інформації, в локальних інформаційних мережах В усіх сучасних клавіатурних пристроях вводу інформації і особливо тих, що мають постійну тенденцію до збільшення КІЛЬКОСТІ клавіш (комп'ютерні системи), використовується, як правило, матричний двохкоординатний спосіб визначення позиції елементів комутаційної матриці, який дає змогу оптимізувати КІЛЬКІСТЬ ШИН матриці Існує декілька способів побудови таких систем ВІДОМІ пристрої вводу інформації [1], в яких під кожною з клавіш комутаційної матриці розміщений акустичний збудник ультразвукових коливань і пластина - звукопровід Приймач таких коливань розташований таким чином, що дає змогу фіксувати координати X і У клавіші натискання, завдяки чому можна без процедури опросу стану клавіш кодувати інформацію, що вводиться Але складний спосіб обробки сигналів, перетворення акустичних сигналів в електричні не забезпечують високої надійності вводу нат замкнених одноточкових вузлів плівкової комутаційної матриці за рахунок формувача стану комутаційної матриці, перші входи якого, що з'єднані з вертикальними провідниками комутаційної матриці, є його першими виходами і з'єднані з першим портом вводу-виводу контролера обробки, другі входи з'єднані з горизонтальними провідниками комутаційної матриці, другі виходи - з другим портом вводу контролера обробки, а третій вихід - з входом інтерфейсу вводу-виводу контролера обробки клавіатури 2 Спосіб за п 1, який відрізняється тим, що динамічне сканування виконують тільки за умови, коли замкненими є два і більше вертикальних провідників з двома і більше горизонтальними провідниками комутаційної матриці Підвищити надійність вводу можна завдяки відомим пристроям вводу інформації [2], [3], які мають комутаційну матрицю провідників, що складається з вертикальних і горизонтальних шин В пристроях використовується збуджуюча напруга, яка подається за допомогою щупа в трьохточечні вузли комутаційної матриці провідників Визначення координат замкненого вузла здійснюється при заміні його інформаційного стану Недоліком пристрою є необхідність застосування трьохточечних комутаційних елементів з низькою надійністю спрацювання Такий же недолік властивий і відомим пристроям [4], [5], в яких застосований послідовний або послідовно-паралельний принцип сканування шин комутаційної матриці ВІДОМІ пристрої вводу інформації [6], [7], [8], в яких застосований статичний спосіб визначення координат натиснутої клавіші для двохточечних комутаційних матриць Перевагою методу є можливість по статичному стану комутаційної матриці провідників визначити координати замкнених вузлів, застосувати більш надійні двохточечні комутаційні елементи Однак даний спосіб має значний недолік, який не дає змоги його використання в сучасних комп'ютерних системах вводу інформа 49141 ції, а саме за допомогою цього способу можна визначити лише одинарні та ПОДВІЙНІ натискання клавіш Звичайно, доля таких натискань від загальної КІЛЬКОСТІ маніпуляцій при роботі комп'ютерних систем може досягати 95% і більш, в залежності від застосованої програми Однак повністю обійтись лише одинарними та подвійними натисканнями неможливо, оскільки виникла б необхідність суттєвого збільшення КІЛЬКОСТІ функціональних клавіш, що додатково ускладнює роботу оператора Найбільш близьким технічним рішенням є поширені сучасні пристрої вводу інформації, починаючи від клавіатур комп'ютерних систем і закінчуючи тастатурами телефонних апаратів ВІДОМІ пристрої вводу Інформації [9], [10], [11], [12], [13], [14], [15], [16-прототип], в яких використовується спосіб послідовного динамічного сканування двохкоординатних плівкових комутаційних матриць з одноточечними комутаційними вузлами Процес сканування і аналіз його результатів в таких системах здійснює контролер з тим або іншим алгоритмом функціонування Перевагою способу є можливість визначати одинарні, ПОДВІЙНІ, потрійні і більш кратні натискання, а до недоліків слід віднести постійне сканування з максимальною амплітудою скануючих імпульсів по всьому полю клавіатури 3 імпульсним динамічним процесом сканування нерозривно пов'язані супроводжуючі процеси електромагнітного випромінювання, спектр частот і інтенсивність яких пов'язані з крутизною фронтів скануючих Імпульсів, частотою їх спрямування, частотою натискання клавіш, амплітудою імпульсів тощо Ці процеси мають два аспекти негативного проявлення Перший з них пов'язаний з проблемами захисту інформації і полягає в цілком реальній технічній можливості несанкціонованого, з достатньої відстані зчитування Інформації, що вводиться за допомогою клавіатури Другому аспекту, а саме, медико-бюлопчному, до недавнього часу не приділялося достатньої уваги Але інтенсивні і переконливі дослідження в цій галузі науки (приклади наукових публікацій [17], [18], [19], [20]) довели серйозність проблеми впливу так званого "електромагнітного бруду" на організм людини і особливо в зонах його "біологічних вікон" Поле клавіатур являє собою систему антенних діполей, випромінювання яких безпосередньо спрямоване на рецепторні точки КІНЦІВОК рук оператора Навіть малі інтенсивності випромінювань за рахунок постійного і безпосереднього впливу і особливостей його спектру частот провокують професійні захворювання В зв'язку з цим намагаються здійснювати зусилля в частковому подоланні цього явища [15], досягаючи зниження рівня електромагнітного випромінювання за рахунок застосування сканування з змінним періодом для клавіш з різною інтенсивністю натискань, навіть за рахунок ускладнення конструктивного виконання Метою запропонованого способу є підвищення інформаційної захищеності і екологічної безпеки пристроїв вводу інформації за рахунок зниження рівня побічного електромагнітного випромінювання шляхом реалізації гібридного способу визначення координат замкнених одноточечних вузлів плівкової комутаційної матриці пристрою вводу інформації Поставлена мета досягається за рахунок того, що в пристрої (прототипі) контролер обробки клавіатури, який вміщує процесор, блок управління, довгострокову пам'ять, пам'ять вільного доступу, інтерфейс вводу-виводу, таймер, порт вводу, виконує динамічне сканування тільки для деякої частини подвійних і більш кратних одночасних натискань клавіш, причому із зменшеною на порядок амплітудою скануючих імпульсів і тільки по необхідним провідникам комутаційної матриці, а в усіх інших випадках реалізує статичне визначення координат замкнених одноточечних вузлів плівкової комутаційної матриці, за рахунок формувача стану комутаційної матриці, перший вхід якого, з'єднаний з вертикальними провідниками комутаційної матриці і з першим портом вводу-виводу контролеру обробки і є його першим виходом, другий вхід з'єднаний з горизонтальними провідниками комутаційної матриці, другий вихід - з другим портом вводу контролеру обробки, а третій вихід - з входом інтерфейсу вводу-виводу контролеру обробки клавіатури Порівняльний аналіз рішення, що заявляється, з прототипом показує, що гібридний спосіб визначення стану комутаційної матриці відрізняється від відомого тим, що контролер обробки клавіатури по запиту виконує завжди читання формувача стану комутаційної матриці і проводить аналіз стану вертикальних і горизонтальних провідників комутаційної матриці Якщо замкненим є тільки один з вертикальних провідників комутаційної матриці або тільки один з горизонтальних провідників комутаційної матриці з одним або декількома ВІДПОВІДНО горизонтальними або вертикальними провідниками комутаційної матриці, то контролер обробки клавіатури однозначно визначає координати замкнутих вузлів матриці для одинарних, подвійних і більш кратних натискань клавіш Якщо замкненими є два і більш вертикальних провідників з двома і більш горизонтальними провідниками комутаційної матриці, то не можна однозначно визначити навіть число натиснутих клавіш і в цьому випадку контролер обробки виконує динамічне сканування, але не по всьому полю клавіатури, а тільки по необхідних вертикальних провідниках комутаційної матриці При цьому апаратна реалізація формувача стану комутаційної матриці забезпечує зменшену на порядок амплітуду скануючих імпульсів Оскільки при роботі на клавіатурі комп'ютерів, в більшості своїй, необхідно використовувати тільки одинарні, рідше ПОДВІЙНІ натискання і доля їх в загальній КІЛЬКОСТІ натискань в залежності від використованих програм може досягати 95% і більш, а динамічне сканування виконується тільки по необхідних вертикальних провідниках і з зменшеною на порядок амплітудою скануючих імпульсів, то застосування даного способу дозволяє на двачотири порядки зменшити електромагнітне випромінювання клавіатур Винахід ілюструється кресленнями на фіг 1 наведена структурна схема пристрою, в якому реалізовано гібридний спосіб визначення координат замкнених вузлів комутаційної матриці клавіатури, 49141 на фіг 2 наведена схема формувача стану комутаційної матриці Тут і скрізь надалі цифрами в дужках, що стоять біля полюса, ЛІНІЙ і стрілок визначені порядкові номери ВІДПОВІДНО входів і виходів Запропонований гібридний спосіб визначення координат замкнених вузлів комутаційної матриці реалізован завдяки введенню формувача стану комутаційної матриці, який дає змогу не тільки визначити статичним способом стан комутаційної матриці, и "Xt(2i) і 'yt(i)", але і забезпечити, у випадку необхідності, реалізацію динамічного скануання Формувач стану матриці 10, схема якого наведена на фіг 2, складається з ТТЛ транзисторних ключів 18, колекторних резисторів 16, перших і других базових резисторів 17 і 19 і схеми АБО 11 Емітери транзисторних ключів 18 з'єднані з нульовим виводом джерела живлення і з резисторами 17, ІНШІ виводи яких з'єднані з базами транзисторних ключів 18, є другими входами формувача 10 і з'єднані з горизонтальними провідниками комутаційної матриці 3, причому колекторні резистори 16 одним виводом з'єднані з позитивним виводом джерела живлення, а другим - з колекторами ключів 18, котрі є другими виходами формувача стану комутаційної матриці 10 і зв'язані з портом вводу 5 контролеру обробки 2, а також з схемою АБО 11, вихід якої є третім виходом формувача 10 і зв'язаний з інтерфейсом вводу-виводу 8 контролера/обробки 2, другі базові резистори 19 одним виводом з'єднані з позитивним виводом джерела живлення, а другі виводи є одночасно першими входами-виходами формувача 10, які з'єднані з вертикальними провідниками комутаційної матриці 3 і з портом вводу-виводу 4 контролер обробки 2 В початковому стані, при відсутності замкнених вузлів комутаційної матриці, формувач стану комутаційної матриці 10 забезпечує стан вертикальних "Xt(2i)" і горизонтальних "Ytfi)" виходів, що дорівнює ЛОГІЧНІЙ одиниці Це обумовлено тим, що провідники шини "Xt(2i)" з'єднані через резистори 19 з позитивним виводом джерела живлення, а провідники шини ''yt(i)" - з колекторними резисторами 16 транзисторних ключів 18, які зачинені їх бази через резистори 17 підключені до нульового виходу джерела живлення На третьому виході формувача 10 запит на обробку відсутній (FLz = 1) Якщо здійснене замикання вузлів, то через бази транзисторних ключів 18 протече струм, транзистори відкриються, переходячи в режим насичення, і на виході формувача 10 стан ВІДПОВІДНИХ шин ''yt(i)" стане дорівнювати логічному нулю, а на виході схеми АБО 11 з'явиться запрос на обробку (Flz = 0) При цьому, рівень напруги на базах транзисторних ключів 18, що відкрились, стане 0,6В (напруга насичення переходу база-емітер) В зв'язку з цим стан ВІДПОВІДНИХ провідників шини "Xt(2i)" теж зміниться до рівня логічного нуля Блок може бути виконай з використанням ТТЛ транзисторів малої потужності, які забезпечують в режимі насичення рівень напруги переходу базаемітер такий, що відповідає рівню логічного нуля КМОП-контролеру обробки, зокрема з транисторами КТ342 Контролером обробки може бути використаний любий відомий фахівцям в даній галузі 6 КМОП-контролер з необхідним набором функціональних можливостей, наприклад, Р1С16С64 Схема "АБО" 11 може бути виконаною по будь-якій відомий фахівцям конфігурації, зокрема, з використанням мікросхем серії 1561 ЛАТ і ЛЕ6 Пристрій (фиг 1), що реалізує гібридний спосіб визначення стану комутаційної матриці, функціонує наступним чином Для прикладу розглянемо замикання вузлів 12 і 13 При наявності запросу (Flz = 0) контролер обробки 2 завжди виконує читання портів вводу 4, 5 і запис стану "Xt(2i)", 'Ytfi)" в пам'ять 7 Наприклад, для матриці ( 8 x 1 6 ) при замкнених вузлах 12 і 13 збудженими шинами будуть "Х1" і "Y1", "Y8", а стан логічних сигналів на вихідних шинах формувача стану комутаційної матриці 10 будуть ВІДПОВІДНО вертикальної шини Xt(2i) (0111111111111111), горизонтальної шини Yt(i) - (01111110) Далі контролер обробки 2 розпочинає виконання програми аналізу стану вертикальних "Xt(2i)" і горизонтальних "Yt(i)" шин Оскільки замкненими є тільки один вертикальний провідник "Х1" з двома горизонтальними провідниками "Y1" і "Y16" комутаційної матриці, токонтролер обробки 2 клавіатури однозначно визначає координати замкнених вузлів і формує адреси натиснутих клавіш Далі за допомогою карт прапорців поточного і попереднього стану клавіатури (пам'ять 7) шляхом їх опросу, запису прапорців натиснутих клавіш і логічних операцій над ними, визначається адреса останньої натиснутої клавіші, и код (пам'ять 6), виконуються ІНШІ необхідні процедури обробки клавіатури і здійснюється передача інформації натиснутої клавіші або по двох провідниках у вигляді скан-коду і імпульсів синхронізації, або по одному провіднику чи інфра-червоному каналу у вигляді таймерної посилки Далі виконується пауза і перевіряється наявність запросу на обробку (FLz) При наявності запросу контролер обробки 2 повторює виконання програми і, якщо стан клавіатури не змінився, то карта прапорців поточного стану співпадає з картою прапорців попереднього стану і передача коду клавіші не вибувається Якщо стан клавіатури змінився за рахунок, наприклад, розмикання вузла 13, то контролер обробки 2, виконавши програму, визначить адресу клавіші, що розімкнулася, і здійснить відповідну процедуру обробки клавіатури Після зникнення запросу на обробку контролер 2 виконує однократно програму для визначення клавіш, що розімкнулися, здійснює ВІДПОВІДНІ процедури обробки і переходить в режим чергування з мікроенергоспоживанням Розглянемо випадок замикання вузлів 12 і 14 При цьому контролер обробки 2, виконуючи аналіз стану вертикальних провідників (0111111111111110) шини "Xt(2i)" І горизонтальних провідників (01111110) шини "Yt(i)" (два вертикальних провідника Х1 і Х16 замкнені з двома горизонтальними Y1 і Y8 провідниками), не зможе однозначно визначити координати замкнених вузлів, бо такий же стан комутаційної матриці буде і при замиканні вузлів (13 15) В цьому випадку контролер обробки 2 виконує програму послідовного динамічного сканування тільки по вертикальних провідниках матриці Х1 і Х16 шляхом подачі на них з виходу порта 4 послідовно нульового потенціалу, закриваючи ВІДПОВІДНІ транзисторні ключі 18 і од 49141 ночасно зчитуючи стан порту 5 По ЗМІНІ стану горизонтальних провідників шини "Yt(i)" (з нуля в одиницю), остаточно визначаються координати замкнених вузлів 12 і 14 та формуються адреси натиснутих клавіш Причому, амплітуда скануючих імпульсів на вертикальних провідниках змінюються з рівня 0,6В до рівня 0,1В Надалі за допомогою карт прапорців поточного і попереднього стану клавіатури (пам'ять 7), шляхом їх опросу, запису прапорців натиснутих клавіш і логічних операцій над ними, визначається адреса останньої натиснутої клавіші, формується її код (пам'ять 6) і виконуються останні необхідні процедури обробки клавіатури Таким чином, гібридний спосіб визначення стану комутаційної матриці пристроїв вводу інформації, в якому критерієм оцінки необхідності виконання динамічного сканування є умова наявності двох і більш замкнених і вертикальних, і горизонтальних провідників комутаційної матриці, дозволяє значно знизити рівень побічного електромагнітного випромінювання і тим самим суттєво підвищити екологічну безпечність і інформаційну захищеність клавіатур ручного вводу інформації для сучасних комп'ютерних систем Література 1 SU, A1 1070533 30 01 84 № 4 ФІГ.1 8 2 SU, A1, 1115040 23 09 84 №35 3 WO 91 /07718 02 06 92 № 9 4 SU, A1, 1569819 07 06 90 № 21 SU, A1, 1649525 15 05 91 №18 DD, екон пат № 264306 25 01 89 № 4 SU, A1, 1716509 28 02 92 № 8 SU, A1, 1684788 15 10 91 №38 US, A, 4845467 04 07 89 т 1104 № 1 10 JP, B4, 2-54581 22 11 90 № 6-1365 , 11 SU, A1, 1691829 15 11 91 №42 12 SU, A1, 1691830 15 11 91 №42 13 SU, A1, 1562899 07 05 90 № 17 14 SU,, A1, 1568039 ЗО 05 90 № 20 , 15 JP, B4, 5-28404 06 04 93 № 6 - 711 16 JP,, B4,, 5-42694 29 06 93 № 6-1068 17 А М Сердюк "Взаимодействие организма с электромагнитными полями как с фактором окружающей среды", Киев, 1976г 18 А Р Павленко "Защита человека от вредного воздействия персональных компьютеров и телевизоров", "Электроника и связь", Киев, 1997г 19 О А Краснова, И В Левченко "Излучение компьютера и здоровье детей", "Информатика и образование", № 1, 1995г 20 В Н Анисимов "Компьютер ученые начинают расследование", "Информатика и образование", 3 5, 1994г 49141 Фіг.2 ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна ( 0 4 4 ) 4 5 6 - 2 0 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71
ДивитисяДодаткова інформація
Назва патенту англійськоюCombined method for determining state of switching matrix elements in a data input unit
Назва патенту російськоюКомбинированный способ определения состояния элементов коммутационной матрицы в устройстве ввода информации
МПК / Мітки
Мітки: визначення, спосіб, інформації, гібридний, вузлів, пристроїв, матриці, стану, комутаційної, вводу
Код посилання
<a href="https://ua.patents.su/5-49141-gibridnijj-sposib-viznachennya-stanu-vuzliv-komutacijjno-matrici-pristrov-vvodu-informaci.html" target="_blank" rel="follow" title="База патентів України">Гібридний спосіб визначення стану вузлів комутаційної матриці пристроїв вводу інформації</a>
Цифровий пристрій контролю стану світлодіодної матриці світлофора
Номер патенту: 50413
Опубліковано: 15.10.2002
Автори: Гаврилюк Володимир Ілліч, Товчигречко Юрій Григорович
МПК: H05B 39/00
Мітки: пристрій, цифровий, світлодіодної, світлофора, контролю, матриці, стану
Формула / Реферат:
Цифровий пристрій контролю стану світлодіодної матриці світлофора, що містить корпус, блок діодів, захисне скло, який відрізняється тим, що до джерела живлення світлодіодної матриці ввімкнутий випрямляч напруги, до якого паралельно ввімкнутий блок підсилення кодуючого сигналу та послідовно роздільний діод, до катода якого ввімкнуті стабілізатори струму світлодіодної матриці, до точок з'єднання послідовно ввімкнутих випромінюючих світлодіодів...
Пристрій для вводу інформації
Номер патенту: 43065
Опубліковано: 15.11.2001
Автори: Шпильовий Віталій Андрійович, Талалаєв Володимир Опанасович, Глуховець Юрій Вікторович, Слюсар Ігор Іванович, Леонов Володимир Володимирович, Івченко Євген Ігорович
МПК: G06F 3/00
Мітки: інформації, вводу, пристрій
Формула / Реферат:
Пристрій для вводу інформації, що містить першу і другу групи тригерів, перший, другий і третій тригери, елемент І-НІ та елемент індикації, вхід якого з'єднаний з виходом першого тригера, перший вхід якого підключений до виходу елемента І-НІ, другий вхід першого тригера з'єднаний одночасно з другим входом третього тригера, третіми входами тригерів другої групи і управляючим входом пристрою, вхід синхронізації якого є першим входом другого...
Спосіб визначення стану кісток
Номер патенту: 32128
Опубліковано: 15.12.2000
Автори: Нечитайло Юрій Миколайович, Фокіна Софія Євгенівна
МПК: A61B 8/08
Мітки: визначення, кісток, спосіб, стану
Текст:
...недоліки. В основу винаходу поставлено задачу у способі визначення стану кісток шляхом використання ультразвукового сканування кісток при якому візуалізують центри осифікації кісток у режимі реального часу, забезпечити найбільш вірогідне та нешкідливе для організму визначення стану кісток. Поставлена задача вирішується тим, що у способі визначення стану кісток шляхом виявлення та подальшого вимірювання діаметру центрів осифікації...
Спосіб визначення локального стану кісткової тканини і пристрій для його виконання
Номер патенту: 45795
Опубліковано: 15.04.2002
Автори: Гамрецький Андрій Анатолійович, Берко Віталій Васильович, Ладонько Юлій Леонідович
МПК: H04N 1/024, G06Q 50/00, A61B 6/00
Мітки: стану, спосіб, пристрій, визначення, виконання, кісткової, тканини, локального
Формула / Реферат:
1. Спосіб визначення локального стану кісткової тканини, що включає оцінку стану кісткової тканини, який відрізняється тим, що проводять сканування та визначення оптичної щільності рентгенограм з подальшою обробкою на персональному комп'ютері.2. Пристрій для визначення локального стану кісткової тканини, що містить персональний комп'ютер, який відрізняється тим, що має оптичну приставку та скануючий модуль для визначення локального...
Пристрій для вводу-виводу інформації
Номер патенту: 45014
Опубліковано: 15.03.2002
Автори: Івченко Євген Ігоревич, Слюсар Ігор Іванович, Леонов Володимир Володимирович, Глуховець Юрій Вікторович, Талалаєв Володимир Опанасович
Мітки: інформації, вводу-виводу, пристрій
Формула / Реферат:
Пристрій для вводу-виводу інформації, що містить перший, сьомий і третій елементи АБО, перший, другий, третій і четвертий регістри, формувач імпульсів, перший, другий і третій елементи І, блок порівняння, селектор тривалості імпульсів, перший і другий тригери, при цьому перший вхід пристрою є першим входом першого елемента АБО, вихід якого підключений до першого входу першого регістра, вихід якого підключений одночасно до першого входу...
Попередній патент: Спосіб різання брусків з твердих матеріалів на пластини дротяною пилою та дротяна пила для здійснення цього способу
Наступний патент: Спосіб інтеркалювання
Випадковий патент: Гелеутворююча тампожна суміш для ліквідації поглинань