Комбінований спосіб автоматичного запобігання зіткненню літальних апаратів з перешкодами
Формула / Реферат
1 .Комбінований спосіб автоматичного запобігання зіткненню літальних апаратів (ЛА) з перешкодами на висотах польоту Нс = Нвд + 400 м і нижче, де: Нс - висота стабілізації ЛА на термін зміни режиму управління; Hвд - висота, обчислена бортовою цифровою обчислювальною машиною (БЦОМ), висота відносна мінімально допустима в момент початку вертикального маневру по запобіганню зіткненню з наземною перешкодою; 400 м - запас висоти на термін зміни обчислень вертикального маневру запобігання зіткненню з повітряною перешкодою в системі типу “TCAS” на обчислення горизонтального маневру і вироблення управляючого сигналу в бортовій цифровій обчислювальній машині (БЦОМ), який полягає в тому, що обчислюють місцезнаходження (МС) ЛА і комплексно використовують початкову інформацію системи висоти і швидкості (СВШ) про висоту і швидкість і радіовисотоміра (РВ) про висоту; інерційної навігаційної системи (ІНС) про прискорення і, обчислену з урахуванням запізнень сигналу барометричної висоти, вертикальну швидкість зниження ЛА, який відрізняється тим, що МС ЛА обчислюють з урахуванням висоти осідання при маневрах, похибки виміру і дотримування висоти в тримірній ортодромічній системі координат відносно наземних перешкод, введених в глобальну базу даних бортової обчислювальної машини (БЦОМ); диференціюють, інтегрують, аналізують відстань і курсовий кут повітряних перешкод, обладнаних системами типу "TCAS", управляючі сигнали для системи управління польотом (СУП) і системи управління тягою двигунів (СУТ) створюють в БЦОМ; перетворюють функцію попередження зіткнень з наземними перешкодами, реалізовану в бортовій системі наближення землі (БСНЗ) типу "GPWS" в функцію запобігання зіткненням з наземними перешкодами, а вертикальний маневр запобігання зіткненням з повітряними перешкодами в бортових системах запобігання зіткненням (БСЗЗ) типів "TCAS 2" і "TCAS 4" в горизонтальний по сигналах БЦОМ; відновлюють програмну траєкторію польоту з поверненням ЛА на нижній безпечний ешелон і заданий маршрут польоту; розширюють можливості функції захисту діапазону пілотажно-навігаційного комплексу (ПНК) ЛА і перетворюють його в інтегровану систему запобігання зіткненню з перешкодами.
2. Спосіб по п. 1, який відрізняється тим, що спосіб базують на діючому автоматизованому ПНК ЛА без його доустатковування, а функцію захисту діапазону автоматично вмикають як для запобігання зіткненню з перешкодами, так і для точного витримування програмної траєкторії польоту по заданому боковому відхиленню і пройденому шляху.
3. Спосіб по п. 1-2, який відрізняється тим, що вертикальні маневри по запобіганню зіткненню з наземною перешкодою, що виконуються за сигналами БЦОМ, ускладнені появою повітряної перешкоди, і по запобіганню зіткненню з повітряною перешкодою, що виконуються за сигналами "TCAS", ускладнені появою наземної перешкоди, закінчують за керованими сигналами БЦОМ як комбіновані.
Текст
1 Комбінований спосіб автоматичного запобігання зіткненню літальних апаратів (ЛА) з перешкодами на висотах польоту Н с = Н вд + 400 м і нижче, де Н с - висота стабілізації ЛА на термін зміни режиму управління, Н вд - висота, обчислена бортовою цифровою обчислювальною машиною (БЦОМ), висота відносна мінімально допустима в момент початку вертикального маневру по запобіганню зіткненню з наземною перешкодою, 400 м - запас висоти на термін зміни обчислень вертикального маневру запобігання зіткненню з повітряною перешкодою в системі типу "TCAS" на обчислення горизонтального маневру і вироблення управляючого сигналу в бортовій цифровій обчислювальній машині (БЦОМ), який полягає в тому, що обчислюють місцезнаходження (МС) ЛА і комплексно використовують початкову інформацію системи висоти і швидкості (СВШ) про висоту і швидкість і радіовисотоміра (РВ) про висоту, інерційної навігаційної системи (ІНС) про прискорення і, обчислену з урахуванням запізнень сигналу барометричної висоти, вертикальну швидкість зниження ЛА, який відрізняється тим, що МС ЛА обчислюють з урахуванням висоти осідання при маневрах, похибки виміру і дотримування висоти в тримірній ортодромічній системі координат відносно наземних перешкод, введених в глобальну базу даних бортової обчислювальної машини (БЦОМ), диференціюють, інтегрують, аналізують відстань і курсовий кут повітряних перешкод, об ладнаних системами типу "TCAS", управляючі сигнали для системи управління польотом (СУП) і системи управління тягою двигунів (СУТ) створюють в БЦОМ, перетворюють функцію попередження зіткнень з наземними перешкодами, реалізовану в бортовій системі наближення землі (БСНЗ) типу "GPWS" в функцію запобігання зіткненням з наземними перешкодами, а вертикальний маневр запобігання зіткненням з повітряними перешкодами в бортових системах запобігання зіткненням (БСЗЗ) типів "TCAS 2" і "TCAS 4" в горизонтальний по сигналах БЦОМ, відновлюють програмну траєкторію польоту з поверненням ЛА на нижній безпечний ешелон і заданий маршрут польоту, розширюють можливості функції захисту діапазону пілотажно-навігаційного комплексу (ПНК) Л А і перетворюють його в інтегровану систему запобігання зіткненню з перешкодами Винахід відноситься до області авіаційної електронної техніки до способів запобігання зіткнень сучасних літальних апаратів ЛА між собою з земною (водною) поверхнею та перешкодами на ній В основі способу навігаційна бортова цифрова обчислююча машина (БЦОМ) пілотажно навігаційного комплексу (ПНК), протягом всього польоту обчислююча відстань до перешкоди, бокове відхилення і перевищення ЛА над нею БЦОМ і задіяні в способі складові ПНК системи управління польотом (СУП), управління тягою двигунів (СУТ), інерційна навігаційна (ІНС), радіовисотомір 2 Спосіб по п 1, який відрізняється тим, що спосіб базують на діючому автоматизованому ПНК ЛА без його доустатковування, а функцію захисту діапазону автоматично вмикають як для запобігання зіткненню з перешкодами, так і для точного витримування програмної траєкторії польоту по заданому боковому відхиленню і пройденому шляху 3 Спосіб по п 1-2, який відрізняється тим, що вертикальні маневри по запобіганню зіткненню з наземною перешкодою, що виконуються за сигналами БЦОМ, ускладнені появою повітряної перешкоди, і по запобіганню зіткненню з повітряною перешкодою, що виконуються за сигналами "TCAS", ускладнені появою наземної перешкоди, закінчують за керованими сигналами БЦОМ як комбіновані О ю 50101 (РВ), електронної індикації (СЕІ), сигналізації небезпечного наближення землі (БСНЗ) типу "GPWS" і запобігання зіткненням з повітряними перешкодами (БСЗЗ) типів "TCAS-2", "TCAS-4", "Ешелон" обладнуються схемами електронної логіки, ЛІНІЯМИ передачі даних і зв'язку для забезпечення виконання вертикального маневру по запобіганню зіткнення з наземними перешкодами введеними в глобальну базу даних, з подальшим автоматичним продовженням польоту на висоті нижнього безпечного ешелону до втручання екіпажа (диспетчера) в дм ПНК В випадку ускладнення маневра запобігання зіткнення появою повітряної перешкоди, спосіб забезпечує вмикання горизонтального маневра по запобіганню зіткнення і з повітряною перешкодою при умові що повітряна перешкода також обладнана БСЗЗ В цьому випадку ускладнений маневр закінчується по сигналам БЦОМ як комбінований маневр запобігання зіткнення з наземною і з повітряною перешкодами Спосіб може застосовуватись для автоматичного запобігання зіткнень ЛА як між собою так і з земною поверхнею і перешкодами на ній Відомий спосіб застереження екіпажа про небезпечне наближення землі з індикацією кольорового рельефа місцевості на кабінному дисплеї системи електронної індикації СЕІ, реалізований в системі сигналізації небезпечного наближення землі БСНЗ типу "GPWS", технічно комплексуючий радіовисотомір, систему висоти і швидкості (СВШ), інерційну навігаційну систему (ІНС) і глобальну базу даних ЛА про перешкоди для компенсації запізнення в сигналі барометричної висоти і забезпечення точного виміру сигналу швидкості зближення з наземними перешкодами при власному русі ЛА [1,3] Існують способи і методи запобігання зіткнень ЛА між собою реалізовані в бортових системах запобігання зіткнень (БСЗЗ) типів "TCAS-2" "TCAS4" і "Ешелон" [1,2,4] Але названі способи реалізують тільки частину завдань Перший забезпечує застереження екіпажу про небезпечне наближення землі, а другий запобігає зближенням тільки між ЛА Дій в комплексних ускладнених ситуаціях польоту ці способи не передбачають Пропонуємий спосіб використання пілотажнонавігаційного комплекса (ПНК) сучасного ЛА вирішує це завдання в автоматизованому польоті без втручання екіпажу в дії систем, що дуже важливо в різнобічно ускладнених ситуаціях польоту в яких виникає більшість авіаційних подій В основу винаходу покладене завдання поєднати вище названі способи для запобігання зіткнень з наземними перешкодами і з перешкодами в повітрі обладнаними системами "TCAS" і "Ешелон", в тому числі і в умовах ускладнених ситуацій польоту і тим самим підвищити безпеку польоту справного сучасного ЛА устаткованого автоматизованим пілотажно-навігаційним комплексом (ПНК) Спосіб засновано на комплексному використанні інформації систем БСНЗ, БСЗЗ, висоти і швидкості СВШ, інерційної ІНС, управління польотом СУП, управління тягою двигунів СУТ, електронної індикації СЕІ в БЦОМ для визначення швид кості зближення захищаємого ЛА з перешкодами Nз л і вироблення управляючого сигналу для від/б вернення від перешкоди Обчислення ортодромічних координат наземних перешкод ведуть на програмній основі протягом всього польоту по інформації про перешкоди з глобальної бази даних ПНК [5] Для цього в банк даних вводять ортодромічні координати перешкод в координатах поворотних пунктів маршруту (nnMi+i)(Sn і Zn), мінімальні безпечні висоти прольоту перешкод МБВ і ширину захищаємого простору по напрямку польоту Z3 Обчислення швидкості зближення \/3бл починають кожен раз при початку вертикального маневру Л А Закінчують обчислення в випадках, коли ЛА, не досяг висоти початку подачі інформації на сигналізацію для екіпажа (диспетчера) і вийшов з маневра або/і з діапазона висот сигналізації Електронна логіка способу побудована на основі обчислення цифрової інформації про параметри польоту в БЦОМ БЦОМ видає і управляючі сигнали в системи і діє в такій ПОСЛІДОВНОСТІ 1 Постійно обчислює текучу відстань і бокове відхилення ЛА від перешкоди ДЗпт(Ф 1) і AZ( 2), відносну висоту польоту допустиму Нвд(ф 3) і мінімально допустиме перевищення над текучою перешкодою ДНпд(ф 7) в момент початку маневру по запобіганню зіткнення з нею ASrrr - Snfiu обч >пт (1) де S o 6 4 = S 0 - J W s d t - відстань ЛА від ППМ, + і, о де So - запрограмована довжина відрізка траси міжППМ, і ППМі+1, W s - швидкість ЛА в напрямку ВІСІ S обчислюємої системи координат СК, S n - відстань перешкоди від ППМ,+і з глобальної бази даних БЦОМ AZnT = Z o 6 4 - Z n , (2) t де Z o 6 4 = Z 0 - f W z d t - бокове відхилення ЛА о від лінії заданого шляху (ЛЗШ), де Zo - запрограмоване бокове відхилення ЛА від ЛЗШ, W z - швидкість ЛА в напрямку ВІСІ Z обчислюючої системи координат (СК), Z n - бокове відхилення перешкоди від ЛЗШ з глобальної бази даних БЦОМ Примітки а) Якщо дані про Z n в глобальній базі даних відсутні, то приймається, що перешкода площадка і займає всю ширину захищаємого маршруту, б) В передбаченні цієї ситуації в подальших розрахунках визначатимемо тільки AS n T маючи на увазі, що AZn3 обраховується по W z аналогічно H B f l = M E B ( M E A + A H M a H - A H t - A H 6 - A H B 1 1 f l , (3) де НВд - висота польоту відносна мінімально допустима в момент початку маневру по запобіганню зіткнення з перешкодою, МБВ(МЕА) -(Minimum Enrout Altitude) - мінімальна безпечна висота по обчислюємій перешкоді в стандартних умовах польоту з глобальної бази даних БЦОМ, 50101 п аеродинаміки 'узн прос 6 способу, визначена на основі вертикальних швид_ ,_ нн= костей барометричної - v убi = — - інерційної f dt просадка ЛА при переводі з діючих швидкості зниження \/зн і вертикальної швидкості зниження Уузн на швидкості горизонтального польоту Vm і Vym=0 (Фіг 1) В цьому співвідношенні (з теорії гравітації} 9 = 9,8 9,8 1 2Н/ де гз - радіус Землі 6371км і Нд - абсолютна висота зльотно-посадкової смуги (ЗПС) аеродрому ,2 v,: Тоді Д Н . V (4) Ja y ,dt і радіовисотоміра - V YpB dt дн,= (5) 273+ t 0 -0,00325Н - температурна похибка висотоміра з теорії аеронавігацм[в ф 5 - H,to - висота МБВ (МЕА) і температура аеродрому з глобальної бази даних БЦОМ, ДНб = (Рприв - Рвист) 8,25 - барометрична похибка СВШ ПА враховуюча різницю між атмосферними тисками на рівні моря РПрИв і виставленим на шкалі тиску висотоміра РВИст І , ДНвид - запас висоти на неточність м розрахунків і видержування 2 Vr n де Vy = (Vy6 + Vyi + VyPB)/3 - обчислена в БЦОМ і осереднена (високоточна) вертикальна швидкість 2 2 2 ДН ВИД = ,/ДНобчУу + ДНобчау + ДНобчд Д Є ДобчУу ау g і V - НЄЗНЗЧНІ ПОХИбКИ О б Ч И С Л Є Н Ь параметрів , які можуть не враховуватись, ДН Е = д/ДЦн + ДНд - сумарна похибка висоти в межах 25 - 30м, складається з аеродинамічної і інструментальної похибок, визначається в лабораторії і заноситься в таблицю приладу Тоді Д Н В И Д = ДН £ « 25-30м (7) де Н - текуча барометрична висота польоту ф визначена БЦОМ на основі обчислення барометричної висоти СВШ по висоті на початку вертикального маневра ЛА з добавкою додатку висоти за термін зниження визначаємого по Vy (ф 4) t Н ф = Н в п С В Ш ± J V y dt + ДН ВИД + ДН б + AHt о де Нвпсвш - висота СВШ на початку зниження, НВд відносна мінімально-допустима висота прольоту перешкоди в момент початку вертикального маневра по запобіганню зіткнення з нею (фЗ) З метою підвищення точності обрахунків, спосіб, в подальшому, дає можливість уточнювати виміри висоти і обчислення Vv за рахунок застосування точної висоти супутникової системи навігації, більш точних СВШ або цифрових барометричних висотомірів де частина похибок буде врахована і необхідності обрахування їх в БЦОМ не буде 2 Якщо ау=0 на Н (ф 7) більшій від висоти ф подачі зображення на СЕІ (ф 11), то на ДЗ пт (ф 1) і AZriT (Ф 2) починають обчислення небезпечних відстаней по наступній перешкоді Так почергово обчислюють рух відносно всіх перешкод, введених в глобальну базу даних БЦОМ, до появи необхідності виконувати вимоги ф 11 3 При виконанні автоматичних вертикальних маневрів ЛА в наборі висоти ешелону, обчислену висоту фактичну Н (ф 7) подають на СЕІ і на ф (6) пульт управління обчислювача СУП (ПУ ОСУП) [5] При досягненні висоти ешелону виставленого на задатчику ПУ ОСУП, ЛА автоматично переводять в горизонтальний польот, на зниженні з ешелону при ау
ДивитисяДодаткова інформація
Назва патенту англійськоюCombined method of automatic prevention of collision of aircraft with obstacles
Назва патенту російськоюКомбинированный способ автоматического предотвращения столкновения летательных аппаратов с препятствиями
МПК / Мітки
МПК: G01C 21/00, B64C 19/00
Мітки: комбінований, запобігання, автоматичного, перешкодами, зіткненню, апаратів, літальних, спосіб
Код посилання
<a href="https://ua.patents.su/5-50101-kombinovanijj-sposib-avtomatichnogo-zapobigannya-zitknennyu-litalnikh-aparativ-z-pereshkodami.html" target="_blank" rel="follow" title="База патентів України">Комбінований спосіб автоматичного запобігання зіткненню літальних апаратів з перешкодами</a>
Спосіб одержання реактивної тяги для космічних літальних апаратів
Номер патенту: 38030
Опубліковано: 15.05.2001
Автори: Фоминський Леонід Павлович, Потапов Юрій Семенович
МПК: F03H 5/00
Мітки: одержання, спосіб, літальних, реактивної, апаратів, тяги, космічних
Текст:
...витрати енергоресурсів (ядерного «палива» та ін.), що вимагаються для досягнення однієї і тієї ж величини реактивної тяги. Цим досягається поставлена задача зменшення витрати енергоресурсів. Використання за запропонованим винаходом компактної і легкої вихрової тр уби чи іншого пристрою, що приводить воднемістку речовину в обертання, замість багатотонного ядерного реактора у відомому способі, дозволяє зменшити масу реактивного двигуна,...
Рушій літальних апаратів “дракон”
Номер патенту: 38115
Опубліковано: 15.05.2001
Автори: Титаренко Олександр Михайлович, Зуєв Микола Григорович, Джелалі Олександр Володимирович
МПК: B64D 27/00, B64C 29/00
Мітки: апаратів, рушій, літальних, дракон
Формула / Реферат:
(21) 2000053083 Дата прийняття(54) (57) рішення 27.09.2000 р.Рушій літальних апаратів, який складається з двох каркасів крил з шарнірно прикріпленими до них з нижнього боку...
Комбінована рушійна установка для літальних апаратів
Номер патенту: 49039
Опубліковано: 16.09.2002
Автор: Яшін Александр Євгеньєвич
МПК: F02K 9/28
Мітки: комбінована, апаратів, літальних, установка, рушійна
Формула / Реферат:
1. Комбінована двигунова установка для літальних апаратів, що складається із зовнішнього і внутрішнього корпусів з повітрозабірниками і соплами, між якими розташована камера згоряння з паливними форсунками, і повітряно-реактивного двигуна, розташованого у внутрішньому корпусі установки, в якому виконаний повітряний тракт, що має кільцевий вихід в камеру згоряння і забезпечений пристроєм формування повітряного потоку, крім того на внутрішньому...
Спосіб забезпечення безпеки польотів літальних апаратів та пристрій для його здійснення
Номер патенту: 26552
Опубліковано: 11.10.1999
Автори: Шазель Ксав'є, Уно Анне-Марі, Лепер Жерар
МПК: G01S 13/94, G05D 1/00, G08G 5/00, G01S 5/14, G01C 21/00, B64D 45/00
Мітки: спосіб, пристрій, здійснення, апаратів, літальних, безпеки, забезпечення, польотів
Формула / Реферат:
1. Способ обеспечения безопасности полетов летательных аппаратов (ЛА), содержащий актуализацию наземной базы данных о местности, описывающей по меньшей мере значительную часть поверхности земного шара, включающую этапы занесения информации, извлекаемой из наземного файла и содержащего данные о по меньшей мере значительной части поверхности земного шара, в массовую память в виде структуры базы данных, построения в массовой памяти по крайней...
Пристрій для попередження зіткнень літальних апаратів
Номер патенту: 1802
Опубліковано: 25.10.1994
Автор: Горенюк Віктор Васильович
МПК: G08G 5/00
Мітки: попередження, зіткнень, апаратів, пристрій, літальних
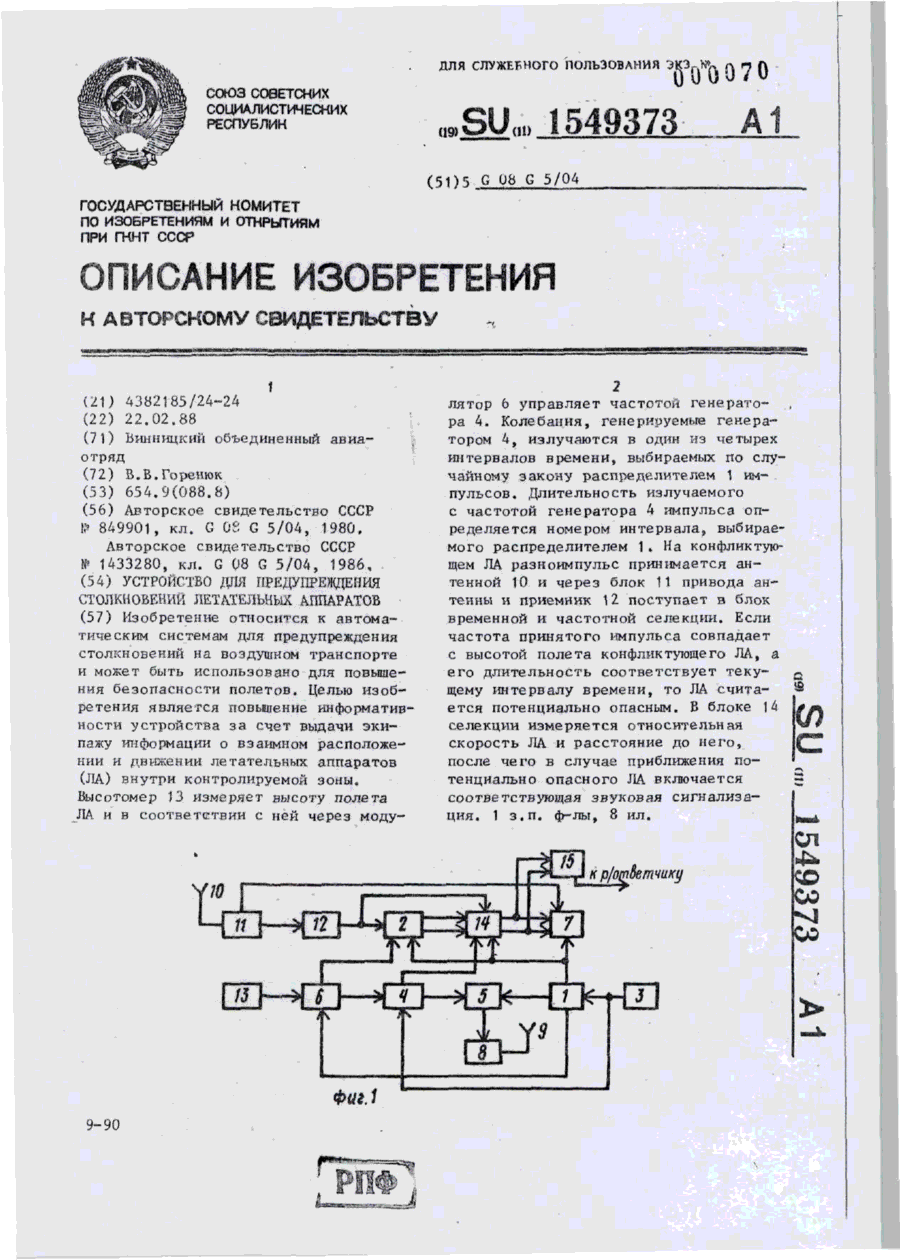
Формула / Реферат:
1. Устройство для предупреждения столкновений летательных аппаратов, содержащее высотомер, выход которого соединен с информационным входом модулятора, первый выход которого подключен ко входу управления генератора несущей частоты, первый выход которого соединен с информационным входом манипулятора, выход которого через усилитель подключен ко входу передающей антенны, генератор опорной частоты, выход которого соединен со входом...
Попередній патент: Планетарний механізм
Наступний патент: Будівельний теплоізоляційний блок
Випадковий патент: Спосіб мокрого гасіння коксу та пристрій для його здійснення