Спосіб пересування транспортного засобу та двигун для його здійснення
Формула / Реферат
1. Спосіб пересування транспортного засобу, що полягає у перетворюванні впливу інерційних мас в односпрямоване пересування транспортного засобу шляхом взаємодії інерційних мас, які рухаються, з інерційними елементами, що встановлені на корпусі, який відрізняється тим, що інерційні маси переміщують примусово в системі відліку обертових інерційних елементів.
2. Двигун для пересування транспортного засобу, який містить корпус, зв'язаний з транспортним засобом, і перетворювач впливу інерційних мас в односпрямований рух, який відрізняється тим, що перетворювач впливу інерційних мас виконаний як два ротори з можливістю обертання в протилежних напрямах і з можливістю примусового руху інерційних мас в системах відліку кожного ротора.
Текст
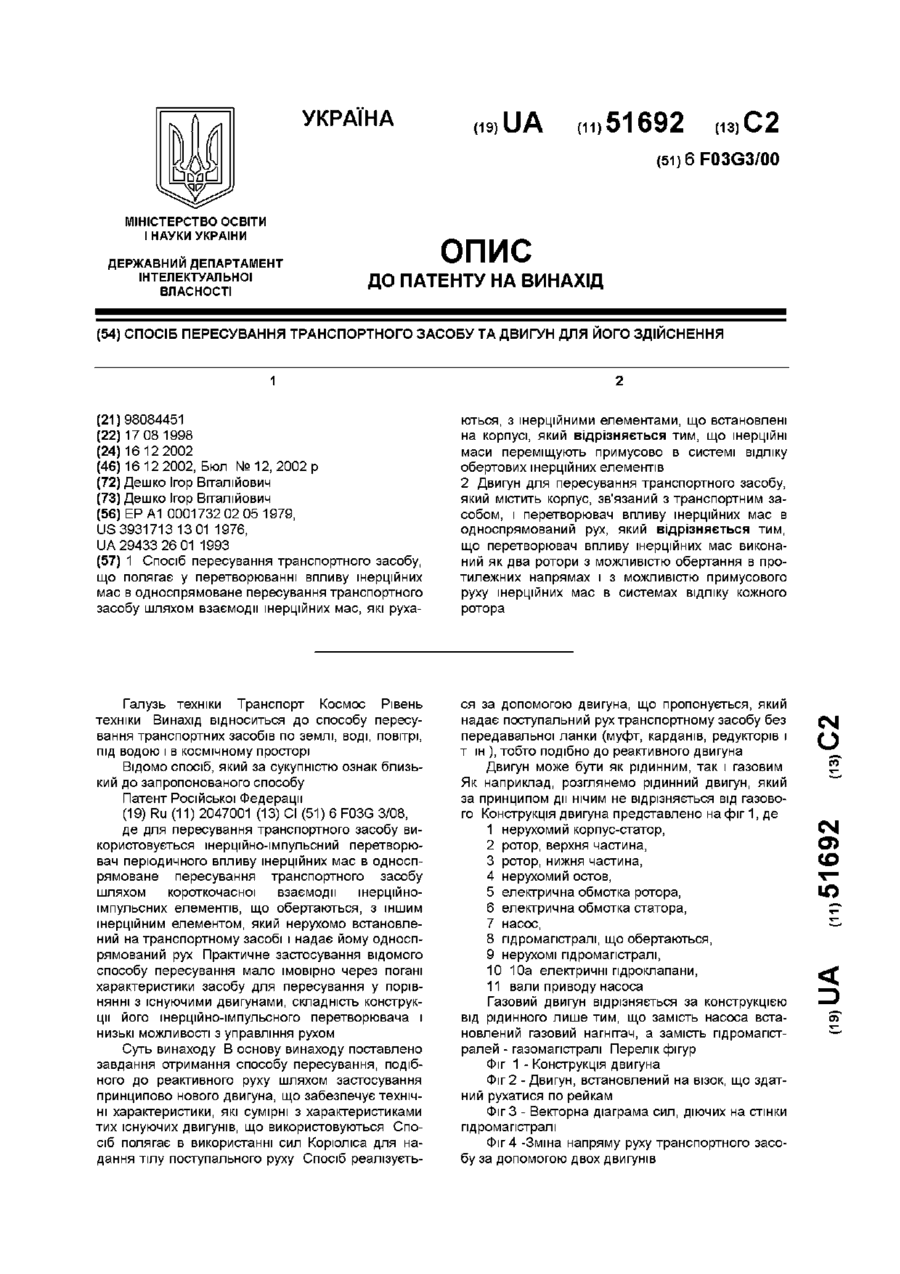
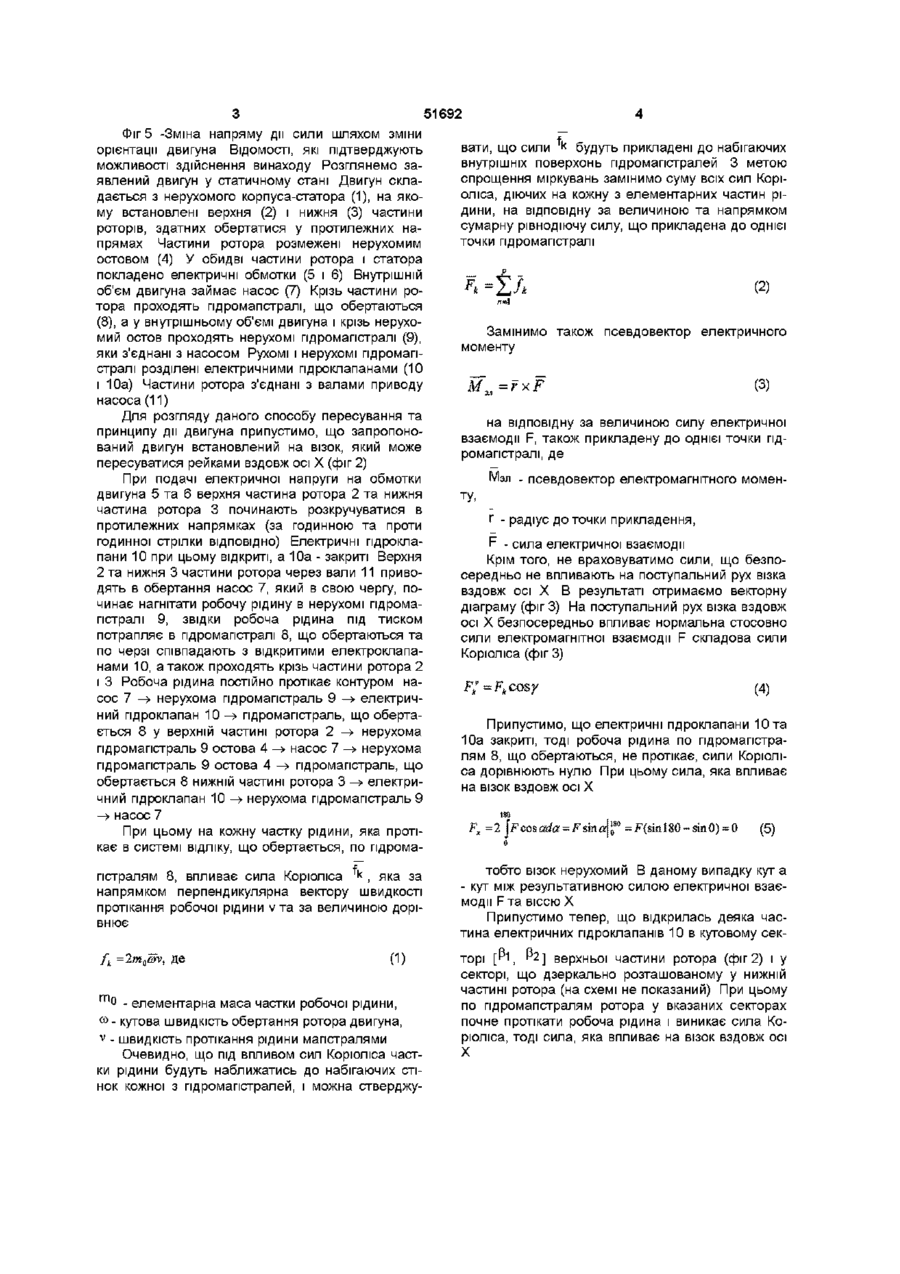
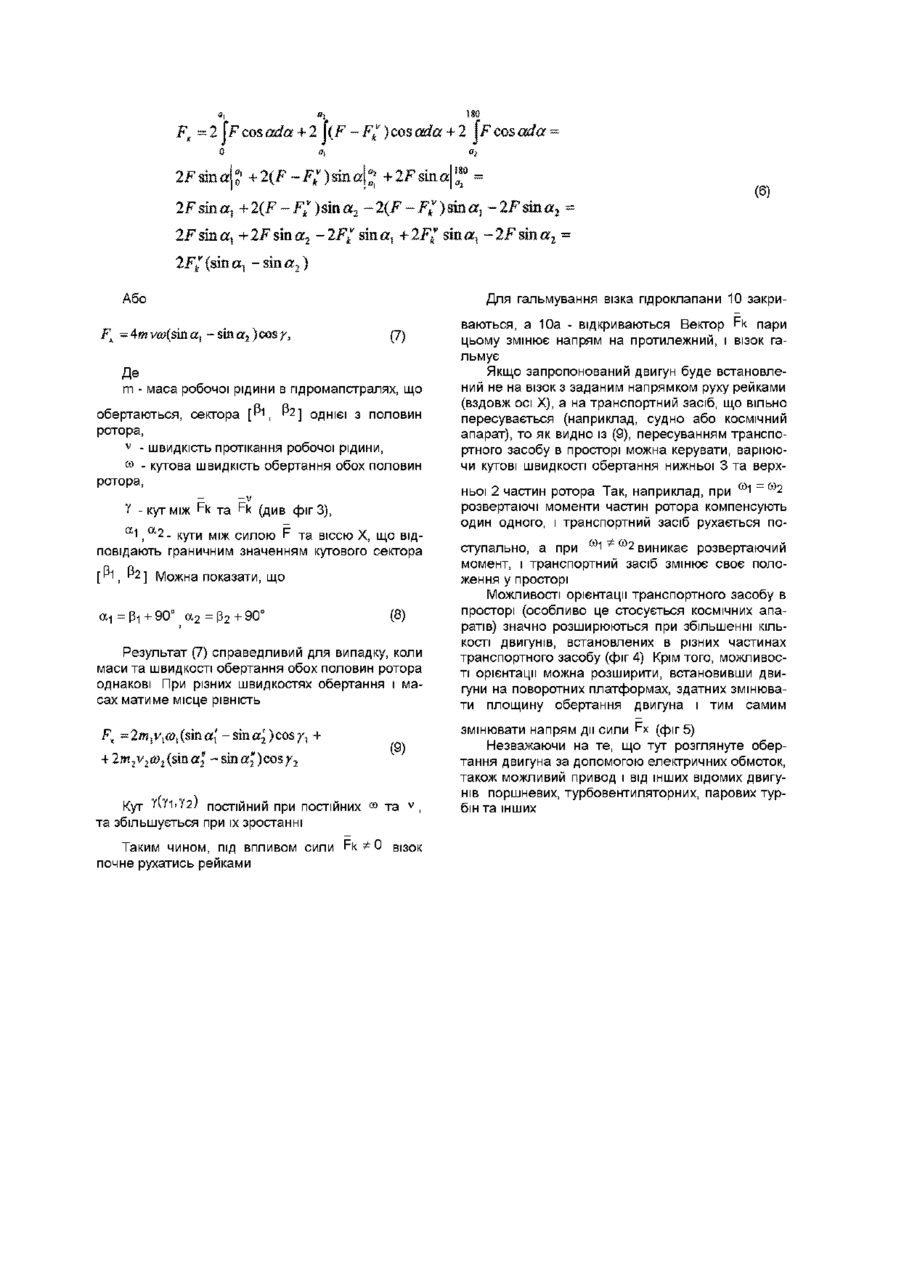
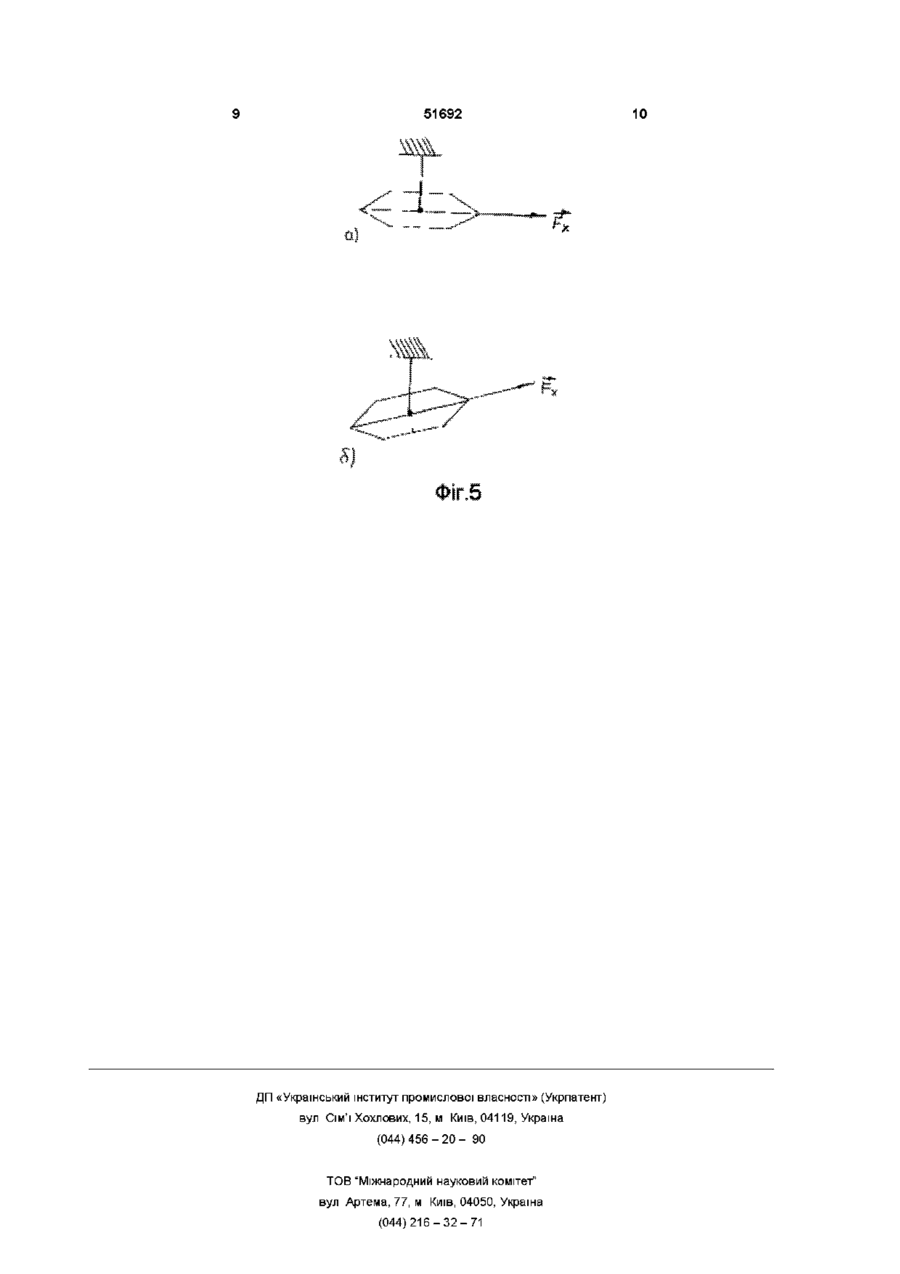
1 Спосіб пересування транспортного засобу, що полягає у перетворюванні впливу інерційних мас в односпрямоване пересування транспортного засобу шляхом взаємодії інерційних мас, які руха ються, з інерційними елементами, що встановлені на корпусі, який відрізняється тим, що інерційні маси переміщують примусово в системі відліку обертових інерційних елементів 2 Двигун для пересування транспортного засобу, який містить корпус, зв'язаний з транспортним засобом, і перетворювач впливу інерційних мас в односпрямований рух, який відрізняється тим, що перетворювач впливу інерційних мас виконаний як два ротори з можливістю обертання в протилежних напрямах і з можливістю примусового руху інерційних мас в системах відліку кожного ротора Галузь техніки Транспорт Космос Рівень техніки Винахід відноситься до способу пересування транспортних засобів по землі, воді, повітрі, під водою і в космічному просторі Відомо спосіб, який за сукупністю ознак близький до запропонованого способу Патент Російської Федерації (19) Ru (11) 2047001 (13) СІ (51) 6 F03G 3/08, де для пересування транспортного засобу використовується інерційно-імпульсний перетворювач періодичного впливу інерційних мас в односпрямоване пересування транспортного засобу шляхом короткочасної взаємодії інерційноімпульсних елементів, що обертаються, з іншим інерційним елементом, який нерухомо встановлений на транспортному засобі і надає йому односпрямований рух Практичне застосування відомого способу пересування мало імовірно через погані характеристики засобу для пересування у порівнянні з існуючими двигунами, складність конструкції його інерційно-імпульсного перетворювача і низькі можливості з управління рухом ся за допомогою двигуна, що пропонується, який надає поступальний рух транспортному засобу без передавальної ланки (муфт, карданів, редукторів і т ш ), тобто подібно до реактивного двигуна Двигун може бути як рідинним, так і газовим Як наприклад, розглянемо рідинний двигун, який за принципом дії нічим не відрізняється від газового Конструкція двигуна представлено на фіг 1, де 1 нерухомий корпус-статор, 2 ротор, верхня частина, 3 ротор, нижня частина, 4 нерухомий остов, 5 електрична обмотка ротора, 6 електрична обмотка статора, 7 насос, 8 пдромапстралі, що обертаються, 9 нерухомі пдромапстралі, 10 10а електричні пдроклапани, 11 вали приводу насоса Газовий двигун відрізняється за конструкцією від рідинного лише тим, що замість насоса встановлений газовий нагнітач, а замість пдромапстралей - газомагістралі Перелік фігур Фіг 1 - Конструкція двигуна Фіг 2 - Двигун, встановлений на візок, що здатний рухатися по рейкам Фіг 3 - Векторна діаграма сил, діючих на стінки пдромапстралі Фіг 4 -Зміна напряму руху транспортного засобу за допомогою двох двигунів Суть винаходу В основу винаходу поставлено завдання отримання способу пересування, подібного до реактивного руху шляхом застосування принципово нового двигуна, що забезпечує технічні характеристики, які сумірні з характеристиками тих існуючих двигунів, що використовуються Спосіб полягає в використанні сил Корюліса для надання тілу поступального руху Спосіб реалізуєть О (О ю 51692 Фіг 5 -Зміна напряму дії сили шляхом зміни орієнтації двигуна ВІДОМОСТІ, ЯКІ підтверджують можливості здійснення винаходу Розглянемо заявлений двигун у статичному стані Двигун складається з нерухомого корпуса-статора (1), на якому встановлені верхня (2) і нижня (3) частини роторів, здатних обертатися у протилежних напрямах Частини ротора розмежені нерухомим остовом (4) У обидві частини ротора і статора покладено електричні обмотки (5 і 6) Внутрішній об'єм двигуна займає насос (7) Крізь частини ротора проходять пдромапстралі, що обертаються (8), а у внутрішньому об'ємі двигуна і крізь нерухомий остов проходять нерухомі пдромапстралі (9), яки з'єднані з насосом Рухомі і нерухомі пдромапстралі розділені електричними пдроклапанами (10 і 10а) Частини ротора з'єднані з валами приводу насоса (11) Для розгляду даного способу пересування та принципу дії двигуна припустимо, що запропонований двигун встановлений на візок, який може пересуватися рейками вздовж осі X (фіг 2) При подачі електричної напруги на обмотки двигуна 5 та 6 верхня частина ротора 2 та нижня частина ротора 3 починають розкручуватися в протилежних напрямках (за годинною та проти годинної стрілки ВІДПОВІДНО) Електричні пдроклапани 10 при цьому відкриті, а 10а - закриті Верхня 2 та нижня 3 частини ротора через вали 11 приводять в обертання насос 7, який в свою чергу, починає нагнітати робочу рідину в нерухомі пдромапстралі 9, звідки робоча рідина під тиском потрапляє в пдромапстралі 8, що обертаються та по черзі співпадають з відкритими електроклапанами 10, а також проходять крізь частини ротора 2 і 3 Робоча рідина постійно протікає контуром насос 7 -> нерухома пдромапстраль 9 -> електричний пдроклапан 10 -> пдромапстраль, що обертається 8 у верхній частині ротора 2 -> нерухома пдромапстраль 9 остова 4 -> насос 7 -> нерухома пдромапстраль 9 остова 4 -> пдромапстраль, що обертається 8 нижній частині ротора 3 -> електричний пдроклапан 10 -> нерухома пдромапстраль 9 -> насос 7 При цьому на кожну частку рідини, яка протікає в системі відліку, що обертається, по пдромапстралям 8, впливає сила Корюліса k , яка за напрямком перпендикулярна вектору швидкості протікання робочої рідини v та за величиною дорівнює fk = m vs де (1) ° - елементарна маса частки робочої рідини, - кутова швидкість обертання ротора двигуна, v - швидкість протікання рідини магістралями Очевидно, що під впливом сил Корюліса частки рідини будуть наближатись до набігаючих стінок кожної з пдромапстралей, і можна стверджую k вати, що сили fu будуть прикладені до набігаючих внутрішніх поверхонь пдромапстралей 3 метою спрощення міркувань замінимо суму всіх сил Коріоліса, діючих на кожну з елементарних частин рідини, на відповідну за величиною та напрямком сумарну рівнодіючу силу, що прикладена до однієї точки пдромапстралі (2) Замінимо також псевдовектор електричного моменту (3) на відповідну за величиною силу електричної взаємодії F, також прикладену до однієї точки пдромапстралі, де псевдовектор електромагнітного моменту, г - радіус до точки прикладення, F - сила електричної взаємодії Крім того, не враховуватиме сили, що безпосередньо не впливають на поступальний рух візка вздовж осі X В результаті отримаємо векторну діаграму (фіг 3) На поступальний рух візка вздовж осі X безпосередньо впливає нормальна стосовно сили електромагнітної взаємодії F складова сили Корюліса (фіг 3) (4) Припустимо, що електричні пдрокпапани Ю т а 10а закриті, тоді робоча рідина по пдромапстралям 8, що обертаються, не протікає, сили Корюліса дорівнюють нулю При цьому сила, яка впливає на візок вздовж осі X (5) тобто візок нерухомий В даному випадку кут а - кут між результативною силою електричної взаємодії FTa ВІССЮ X Припустимо тепер, що відкрилась деяка частина електричних пдроклапанів 10 в кутовому секторі [Р1, Р2] верхньої частини ротора (фіг 2) і у секторі, що дзеркально розташованому у нижній частині ротора (на схемі не показаний) При цьому по пдромапстралям ротора у вказаних секторах почне протікати робоча рідина і виникає сила Корюліса, тоді сила, яка впливає на візок вздовж осі X )cosada +2 + 2Fsin«' 2 F sin a 8 0 (6) -f 2 ( F ~ F / ) s i n « 2 1 2 F s i n a , +2FsinG:., -2F, ' sin or, -f-2F." sin a, - 2 F s m « , 2 F / ( s i n a l -sin a , ) Або Fx = in a t - sin a 2 ) cos y, U) Де m - маса робочої рідини в пдромапстралях, що обертаються, сеісгора [Р1, ^ 2 ] однієї з половин ротора, v - швидкість протікання робочої рідини, ю - кутова швидкість обертання обох половин ротора, — — V У - кут між Fk та Fk (див фігЗ), а л а2. кути між силою F та віссю X, що відповідають граничним значенням кутового сектора , Р2] Можна показати, що (8) =р 1 +90° а 2 = р 2 + 9 0 ° Результат (7) справедливий для випадку, коли маси та швидкості обертання обох половин ротора однакові При різних швидкостях обертання і масах матиме місце рівність Fx Кут Ї^1'Ї2) постійний при постійних та збільшується при їх зростанні (9) ю та v , Таким чином, під впливом сили Fk Ф 0 візок почне рухатись рейками Для гальмування візка пдроклапани 10 закриваються, а 10а - відкриваються Вектор Fk пари цьому змінює напрям на протилежний, і візок гальмує Якщо запропонований двигун буде встановлений не на візок з заданим напрямком руху рейками (вздовж осі X), а на транспортний засіб, що вільно пересувається (наприклад, судно або космічний апарат), то як видно із (9), пересуванням транспортного засобу в просторі можна керувати, варіюючи кутові швидкості обертання нижньої 3 та верхньої 2 частин ротора Так, наприклад, при Ю 1 ~ Ю 2 розвертаючі моменти частин ротора компенсують один одного, і транспортний засіб рухається поступально, а при Ю 1 ф Ю 2 виникає розвертаючий момент, і транспортний засіб змінює своє положення у просторі Можливості орієнтації транспортного засобу в просторі (особливо це стосується космічних апаратів) значно розширюються при збільшенні КІЛЬКОСТІ двигунів, встановлених в різних частинах транспортного засобу (фіг 4) Крім того, можливості орієнтації можна розширити, встановивши двигуни на поворотних платформах, здатних змінювати площину обертання двигуна і тим самим змінювати напрям дії сили Fx (фіг 5) Незважаючи на те, що тут розглянуте обертання двигуна за допомогою електричних обмоток, також можливий привод і від інших відомих двигунів поршневих, турбовентиляторних, парових турбін та інших 51692 51692 ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна ( 0 4 4 ) 4 5 6 - 2 0 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71 10
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for vehicle motion and engine for its implementation
Назва патенту російськоюСпособ передвжиения транспортного средства и двигатель для его реализации
МПК / Мітки
МПК: F03G 3/00
Мітки: транспортного, спосіб, засобу, пересування, здійснення, двигун
Код посилання
<a href="https://ua.patents.su/5-51692-sposib-peresuvannya-transportnogo-zasobu-ta-dvigun-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб пересування транспортного засобу та двигун для його здійснення</a>
Спосіб зниження аеродинамічних втрат від лобового опору транспортного засобу та пристрій для його здійснення

Номер патенту: 27557
Опубліковано: 15.09.2000
Автор: Мороз Петро Пилипович
МПК: B62D 35/00
Мітки: лобового, зниження, аеродинамічних, втрат, спосіб, засобу, здійснення, транспортного, пристрій, опору
Текст:
...на его вспо могательном тяговом движителе энергии набегаю щего потока встречного воздуха в дополнитель ную тяговую силу, отличающийся тем. что в ка честве вспомогательного тягового движителя при меняют закрепляемые на лобовых поверхностях транспортного средства или его вспомогательных элементах аэродинамические несущие поверхнос ти или комбинации из них, на которые набегаю щий поток встречного воздуха подают отклонен ным лобовыми...
Спосіб подачи попереджувальних сигналів про наступний маневр транспортного засобу і пристрій для його здійснення
Номер патенту: 33003
Опубліковано: 15.02.2001
Автор: Ананьєв Борис Юрійович
Мітки: засобу, маневр, здійснення, подачі, попереджувальних, пристрій, транспортного, сигналів, спосіб, наступний
Текст:
...сигчаптв пго наступний маневр тшчсгтортного f пристрій дня здійснення способу. Винаходи відносяться до галузі транспорту і мсдуть бути використані у тшнопоитних засобах,про наступний маневр як'лх необх ідно своєчасно оповіщати учасників wxv. ПРОТОТИПОМ заявляемого способу є спосіб подз.чи попеиелжуючих сигна лів, відомий по книзі "Автомобілі ВАЗ-21Ш,ВАЗ-2109. Багатодобовий альбом." авт.Мітззоев Г.К. та гнш. , f ' l. ( !1...
Спосіб керування напрямком руху транспортного засобу сільськогосподарського призначення та пристрій для його здійснення
Номер патенту: 28364
Опубліковано: 16.10.2000
Автор: Надикто Володимир Трохимович
МПК: A01B 59/00, A01B 69/00
Мітки: сільськогосподарського, напрямком, призначення, транспортного, пристрій, здійснення, спосіб, засобу, руху, керування
Формула / Реферат:
1. Способ управления направлением движения транспортного средства сельскохозяйственного назначения, состоящего из трактора с передними управляющими колесами и одноосного прицепа, поворотный кронштейн которого оборудован вертикальным шарниром с механизмом его блокировки в виде гидроцилиндра двухстороннего действия, заключающийся в дискретной подаче управляющего воздействия на вход механизма блокировки вертикального шарнира прицепа при...
Спосіб переміщення електротранспортного засобу та засіб для його здійснення
Номер патенту: 48372
Опубліковано: 15.08.2002
Автор: Пятківський Петро Дем'янович
Мітки: електротранспортного, переміщення, засіб, здійснення, спосіб, засобу
Формула / Реферат:
1. Спосіб переміщення електротранспортного засобу, який переміщують за допомогою електоропривода, який відрізняється тим, що подають на електропривід електричну енергію, необхідну для його роботи, з поверхні покриття дороги.2. Електротранспортний засіб, який містить колеса та електоропривід, який відрізняється тим, що засіб оснащений щонайменше двома струмознімачами, які знаходяться в контакті з поверхнею дорожнього покриття.3 ....
Підвіска транспортного засобу

Номер патенту: 34334
Опубліковано: 15.02.2001
Автори: Становський Олександр Леонідович, Гончаров Євгеній Констянтинович, Гончарова Ольга Євгенівна, Балан Сергій Олександрович, Максимов Валерій Григорович
МПК: B60G 1/00
Мітки: підвіска, транспортного, засобу
Текст:
...6, а також драбини 7, що стягують пакет за допомогою гайок 8, при цьому балка 5 неведучої осі встановлена в направляючій 9 з можливістю повороту відносно подовжньої геометричної осі в обидві сторони і, для повернення в початкове положення, сполучена при допомозі зацепа 10 з пружним елементом 11, діаметрально протилежна частина якого зв'язана із зацепом 12 верхньої накладки 1. Підвіска працює таким чином. При русі транспортного засобу...
Попередній патент: Маніпулятор для заміни пластини ливарної ємності та комплект пластин для цього маніпулятора
Наступний патент: Лак для нігтів з протипсоріазною активністю
Випадковий патент: Препарат "брованол плюс" для лікування та профілактики захворювань, спричинених гельмінтами та нашкірними паразитами