Спосіб керування напрямком руху транспортного засобу сільськогосподарського призначення та пристрій для його здійснення
Формула / Реферат
1. Способ управления направлением движения транспортного средства сельскохозяйственного назначения, состоящего из трактора с передними управляющими колесами и одноосного прицепа, поворотный кронштейн которого оборудован вертикальным шарниром с механизмом его блокировки в виде гидроцилиндра двухстороннего действия, заключающийся в дискретной подаче управляющего воздействия на вход механизма блокировки вертикального шарнира прицепа при изменении направления движения транспортного устройства, отличающийся тем, что дополнительно измеряют угловую скорость поворота управляемых колес и скорость поступательного перемещения трактора, а управляющее воздействие постоянно формируют пропорционально отношению измеренных величин по формуле:
![]()
где ![]() - угловая скорость поворота управляемых колес трактора;
- угловая скорость поворота управляемых колес трактора;
Vy - скорость поступательного перемещения трактора;
L - база трактора;
![]() - угол в горизонтальной плоскости между продольными осями трактора и одноосного прицепа;
- угол в горизонтальной плоскости между продольными осями трактора и одноосного прицепа;
![]() - максимальный угол поворота транспортного средства в момент завершения им вхождения им в фазу движения с постоянным радиусом кривизны.
- максимальный угол поворота транспортного средства в момент завершения им вхождения им в фазу движения с постоянным радиусом кривизны.
b - расстояние от оси вертикального шарнира прицепа до оси его колес и задних колес трактора.
2. Устройство для осуществления способа управления направлением движения транспортного средства сельскохозяйственного назначения, отличающееся тем, что обе полости гидроцилиндра блокировки вертикального шарнира прицепа связаны с гидрораспределителем, электрически соединенным с блоком сравнения сигналов, один вход которого связан о датчиком угла поворота прицепа относительно трактора, а другой - с выходом блока сравнения сигналов, поступающих на него от датчиков, регистрирующих линейную скорость перемещения трактора и угловую скорость поворота его передних управляемых колес.
Текст
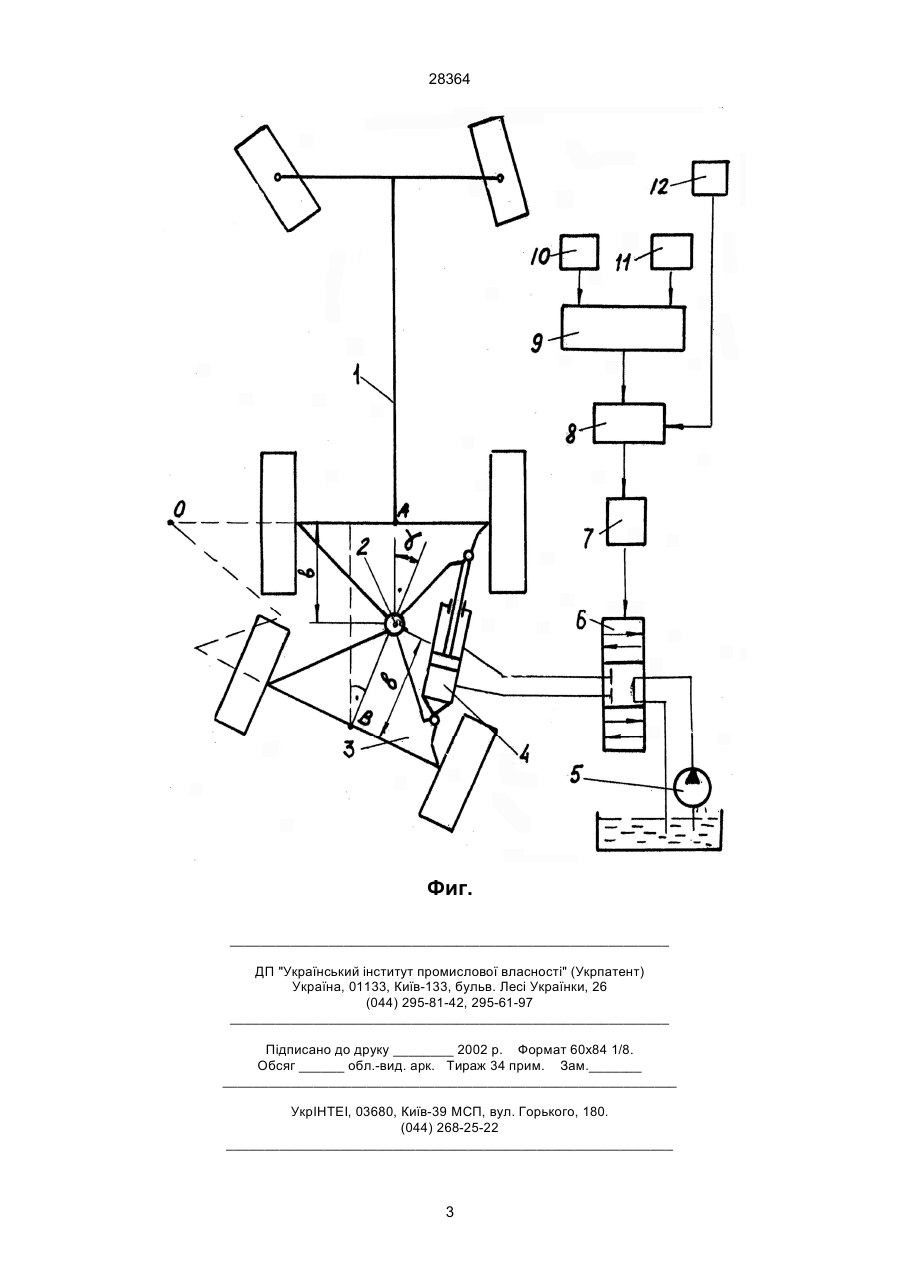
1. Способ управления направлением движения транспортного средства сельскохозяйственного назначения, состоящего из трактора с передними управляющими колесами и одноосного прицепа, поворотный кронштейн которого оборудован вертикальным шарниром с механизмом его блокировки в виде гидроцилиндра двухстороннего действия, заключающийся в дискретной подаче управляющего воздействия на вход механизма блокировки вертикального шарнира прицепа при изменении направления движения транспортного устройства, отличающийся тем, что дополнительно измеряют угловую скорость поворота управляемых колес и скорость поступательного перемещения трактора, а управляющее воздействие постоянно формируют пропорционально отношению измеренных величин по формуле: w L × sin2 g = , Vy 2 × emax × b 2 × (1 + cos g )2 28364 оптимальный радиус Rопт., при котором путь выполняемого маневра будет наименьшим: R опт. = L × Vy / 2 × w × e max , управляемых колес (w) и скоростью поступательного перемещения транспортного средства (Vy). Это обеспечит последнему поворот в агрегате с тем или иным орудием с оптимальным радиусом. На чертеже изображено устройство (вид сверху), предназначенное для реализации данного способа. Устройство состоит из трактора 1 с передними управляемыми колесами и одноосного прицепа 3, поворотный кронштейн которого (на фигуре не показан) оборудован вертикальным шарниром 2 с механизмом его блокировки в виде гидроцилиндра двухстороннего действия 4. Обе полости последнего через гидрораспределитель 6 соединены с источником давления 5. Золотник гидрораспределителя 6 перемещается с помощью электромагнита 7, электрически связанного с выходом блока сравнения сигналов 8. Один из входов этого блока соединен с датчиком 12, регистрирующим угол поворота прицепа 3 относительно продольной оси симметрии трактора 1 (угол g). На второй его вход через блок преобразования 9 поступает сигнал от датчиков 10 и 11, измеряющих линейную скорость перемещения трактора и угловую скорость поворота его передних управляемых колес соответственно. Данный способ предлагаемым устройством реализуется следующий образом. Сигналы с датчиков 10 и 11 поступают в преобразователь, где с учетом выражения (4) рассчитывается и формируется в виде электрического сигнала требуемое значение угла между продольными осями прицепной тележки прицепной и трактора (gтр.). В блоке 8 gтр. сравнивается с постоянно измеряемым действительным значением угла g. Если значения gтр. и g не равны, то их разница в виде электрического сигнала соответствующей полярности поступает на электромагнитный блок 7. Последний, в зависимости от полярности поступившего сигнала, перемещает в нужном направлении золотник гидрораспределителя 6 и, естественно, шток гидроцилиндра 4. Производимый при этом поворот прицепа относительно трактора в горизонтальной плоскости происходит до тех пор, пока не будет достигнуто равновесное условие gтр.=g, обеспечивающее как совпадение траекторий движения задних колес трактора 1 и колес прицепа 3, так и поворот транспортного средства в целом с оптимальным радиусом. (1) где L, Vy - продольная база и скорость поступательного движения трактора соответственно; w угловая скорость поворота управляемых колес; emax - максимальный угол поворота агрегата в момент завершения вхождения им в фазу движения с постоянным радиусом кривизны. Если в реальных условиях минимальный радиус поворота агрегата (Rmin), обусловленный его конструктивными и другими параметрами, будет больше Rопт., то это непременно приведет к увеличению длины и (как правило) времени маневра. Противоположный вариант тоже неприемлем, поскольку практически реализовать Rmin в этом случае не предоставляется возможным. Наиболее оптимальным решением является условие: Rmin=Rопт. (2) Если считать достигнутым условие движения по единой колее колес прицепа и задних колес трактора (ОА равно ОВ), то, как следует из фигуры, справедливо следующее равенство: (3) ОА=ОВ=Rmin=b·(1+cosgmax)/singmax, где: b - расстояние от оси вертикального шарнира прицепа до оси его колес и задних колес трактора; gmax - максимально допустимое значение угла поворота в горизонтальной плоскости рамы прицепа относительно рамы трактора. Совместное решение уравнений (1) и (3) показывает, что практическая реализация условия (2) возможна при движении на поворотной полосе в определенном режиме, показатель которого К для каждого конкретного агрегата определяется его конструктивными и кинематическими параметрами: L × sin2 g max w = . K= Vy 2 × e max × b 2 × (1 + cos g max )2 С учетом этого вполне справедливым является и следующее условие: w L × sin2 g = (4) Vy 2 × e max × b 2 × (1 + cos g )2 где: g - текущее значение угла между продольными осями прицепной тележки и трактора. В основу предлагаемого способа положена задача автоматического поддержания требуемого соотношения между угловой скоростью поворота 2 28364 Фиг. __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2002 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 34 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 3
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and device for controlling moving direction of transport means of agricultural purpose
Автори англійськоюNadykto Volodymyr Trokhymovych
Назва патенту російськоюСпособ управления направлением движения транспортного средства сельскохозяйственного назначения и устройство для его осуществления
Автори російськоюНадикто Владимир Трофимович
МПК / Мітки
МПК: A01B 69/00, A01B 59/00
Мітки: руху, напрямком, засобу, здійснення, спосіб, пристрій, призначення, транспортного, керування, сільськогосподарського
Код посилання
<a href="https://ua.patents.su/3-28364-sposib-keruvannya-napryamkom-rukhu-transportnogo-zasobu-silskogospodarskogo-priznachennya-ta-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування напрямком руху транспортного засобу сільськогосподарського призначення та пристрій для його здійснення</a>
Транспортний засіб сільськогосподарського призначення
Номер патенту: 24500
Опубліковано: 21.07.1998
Автор: Надикто Володимир Трохимович
МПК: A01B 59/00
Мітки: призначення, сільськогосподарського, транспортний, засіб
Формула / Реферат:
Транспортное средство сельскохозяйственного назначения, состоящее из энергетической и соединенной с ней при помощи сцепного устройства технологической тележек, отличающееся тем, что сцепное устройство выполнено в виде раздвижного бруса, неподвижная половина которого, состоящая из двух частей, соединенных между собой вертикальным шарниром, оборудованным механизмом его блокировки в виде гидроцилиндра двухстороннего действия, одним концом жестко...
Спосіб зниження аеродинамічних втрат від лобового опору транспортного засобу та пристрій для його здійснення

Номер патенту: 27557
Опубліковано: 15.09.2000
Автор: Мороз Петро Пилипович
МПК: B62D 35/00
Мітки: транспортного, засобу, опору, пристрій, зниження, спосіб, здійснення, втрат, лобового, аеродинамічних
Текст:
...на его вспо могательном тяговом движителе энергии набегаю щего потока встречного воздуха в дополнитель ную тяговую силу, отличающийся тем. что в ка честве вспомогательного тягового движителя при меняют закрепляемые на лобовых поверхностях транспортного средства или его вспомогательных элементах аэродинамические несущие поверхнос ти или комбинации из них, на которые набегаю щий поток встречного воздуха подают отклонен ным лобовыми...
Спосіб керування напрямком буріння і пристрій для його здійснення
Номер патенту: 28529
Опубліковано: 16.10.2000
Автори: Пасинков Роман Юхимович, Ревякін Володимир Іванович, Молчанов Вячеслав Борисович
МПК: E21B 7/08, E21B 47/02
Мітки: керування, напрямком, здійснення, пристрій, буріння, спосіб
Формула / Реферат:
1. Способ управления направлением бурения, включающий установку воздуховодного и с двух сторон от него двух шнековых ставов, на одном конце которых устанавливают головную стяжку с буровыми коронкам, а другой конец шнековых ставов соединяют с выходными муфтами, подачу бурошнекового става в скважину с последующим его наращиванием и разборкой после бурения, отличающийся тем, что перед подачей бурошнекового става в скважину -секции шнеков...
Пристрій для визначення сили опору руху транспортного засобу на плаву
Номер патенту: 15660
Опубліковано: 30.06.1997
Автори: Єпіфанов Віталій Валерійович, Трушкін Віктор Миколайович
МПК: G01M 17/00
Мітки: пристрій, сили, транспортного, засобу, визначення, руху, опору, плаву
Формула / Реферат:
(57) Устройство для определения силы со противления движению транспортного средства на плаву, содержащее буксирный трос и динамометр, закрепленный с одной стороны к буксирному тросу, а с противоположной к корпусу транспортного средства, отличающееся тем, что в кормовой части корпуса транспортного средства закреплен бак с управляемым сливным клапаном, а на баке закреплен насос, выходной канал которого сообщен с баком, а входной - с...
Пристрій для керування зчепленням транспортного засобу з шляхом
Номер патенту: 8175
Опубліковано: 29.03.1996
Автори: Стерхова Людмила Олексіївна, Яковлєв Лев Васильович
МПК: B60C 11/14
Мітки: засобу, шляхом, зчепленням, транспортного, пристрій, керування
Формула / Реферат:
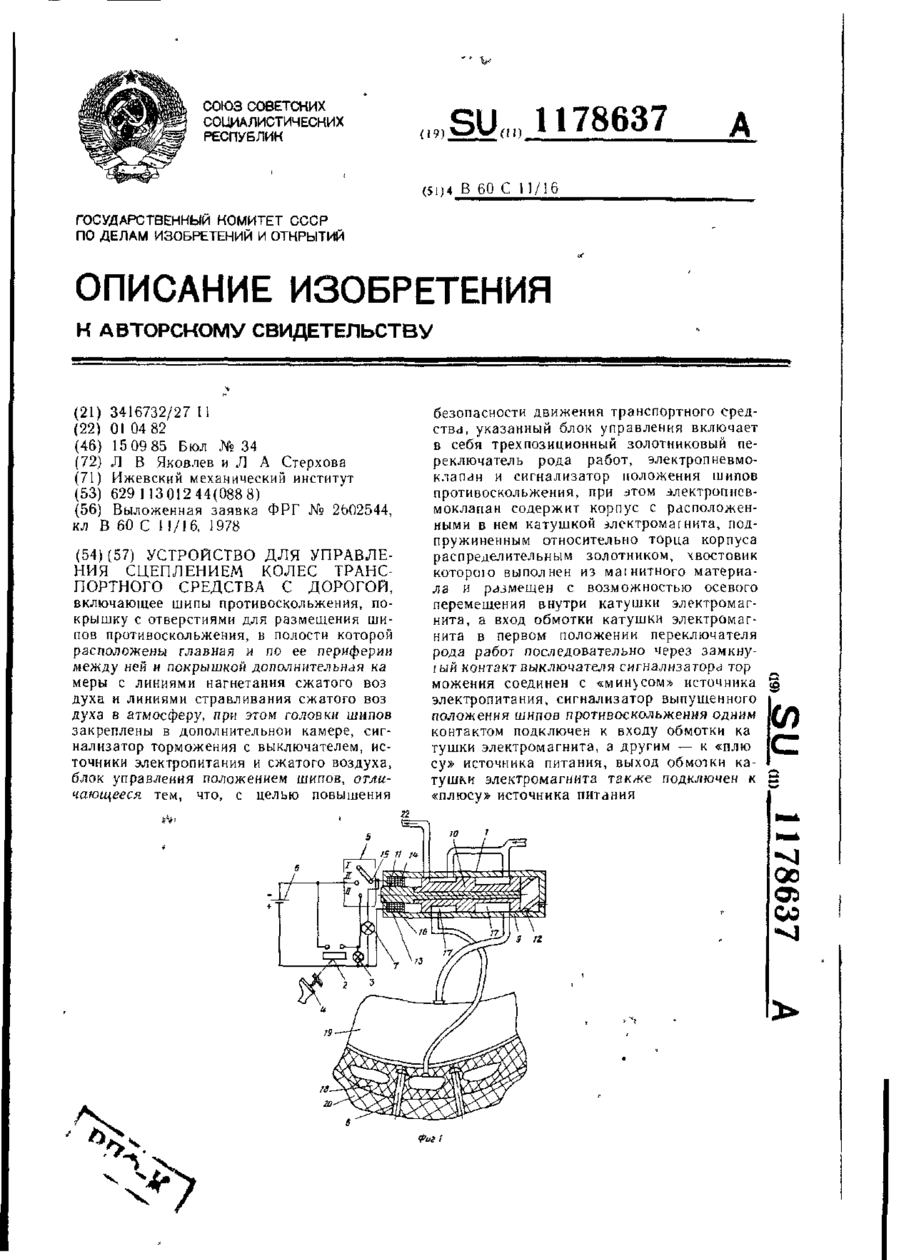
Устройство для управления сцеплением колес транспортного средства с дорогой, включающее шипы противоскольжения, покрышку с отверстиями для размещения шипов противоскольжения, в полости которой расположены главная и по ее периферии между ней и покрышкой дополнительная камеры с линиями нагнетания сжатого воздуха и линиями стра вливания сжатого воздуха в атмосферу, при этом головки шипов закреплены в дополнительной камере, сигнализатор...
Попередній патент: Реагент для обробки бурових розчинів
Наступний патент: Енергетичний засіб сільськогосподарського призначення
Випадковий патент: Одноразовий медичний шприц "мод-1"