Гідролокаційна система
Номер патенту: 51698
Опубліковано: 16.12.2002
Автори: Шличек Любов Іванівна, Клочан Валентина Іванівна, Клочан Юрій Анатолійович, Гончар Анатолій Іванович
Формула / Реферат
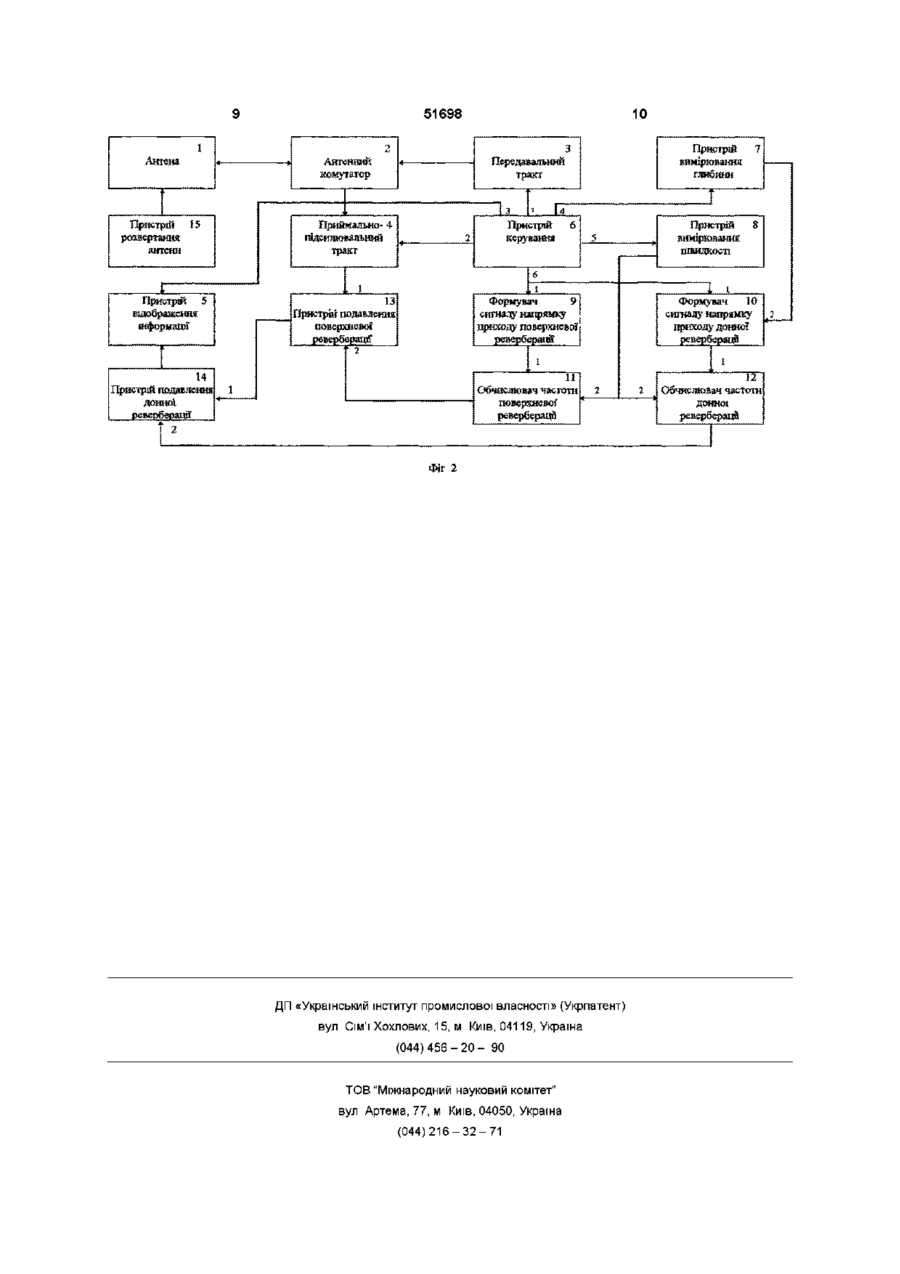
Гідролокаційна система, яка містить антену, антенний комутатор, передавальний тракт, приймально-підсилювальний тракт, пристрій відображення інформації, пристрій керування гідролокаційною системою, пристрій вимірювання глибини та пристрій вимірювання швидкості руху судна, у якій вихід антени через антенний комутатор підключений до виходу передавального тракту та входу приймально-підсилювального тракту, перший, другий, третій, четвертий та п'ятий керуючі виходи пристрою керування з'єднані з керуючими входами передавального тракту, приймально-підсилювального тракту, пристрою відображення інформації, пристрою вимірювання глибини та пристрою вимірювання швидкості руху судна відповідно, яка відрізняється тим, що додатково уведені пристрій розгортання характеристики спрямованості антени, формувач сигналу напряму приходу поверхневої реверберації, формувач сигналу напряму приходу донної реверберації, обчислювач частоти поверхневої реверберації, обчислювач частоти донної реверберації, пристрій подавлення поверхневої реверберації та пристрій подавлення донної реверберації, при цьому керуючий вхід антени з'єднаний з виходом пристрою розгортання характеристики спрямованості антени, перші входи формувачів сигналів напряму приходу поверхневої та донної реверберації приєднані до шостого керуючого виходу пристрою керування системою, виходи формувачів окремо з'єднані з першими входами обчислювачів частоти поверхневої та донної реверберації відповідно, а їх другі входи з'єднані з виходом пристрою вимірювання швидкості руху судна, виходи обчислювачів окремо з'єднані з керуючими входами пристрою подавлення поверхневої та донної реверберації відповідно, а другий керуючий вхід формувача сигналу напряму приходу донної реверберації з'єднаний з виходом пристрою вимірювання глибини, при цьому сигнальний вхід пристрою подавлення поверхневої реверберації підключений до виходу приймально-підсилювального тракту, а вихід - до сигнального входу пристрою подавлення донної реверберації, вихід якого, в свою чергу, під'єднаний до інформаційного входу пристрою відображення інформації.
Текст
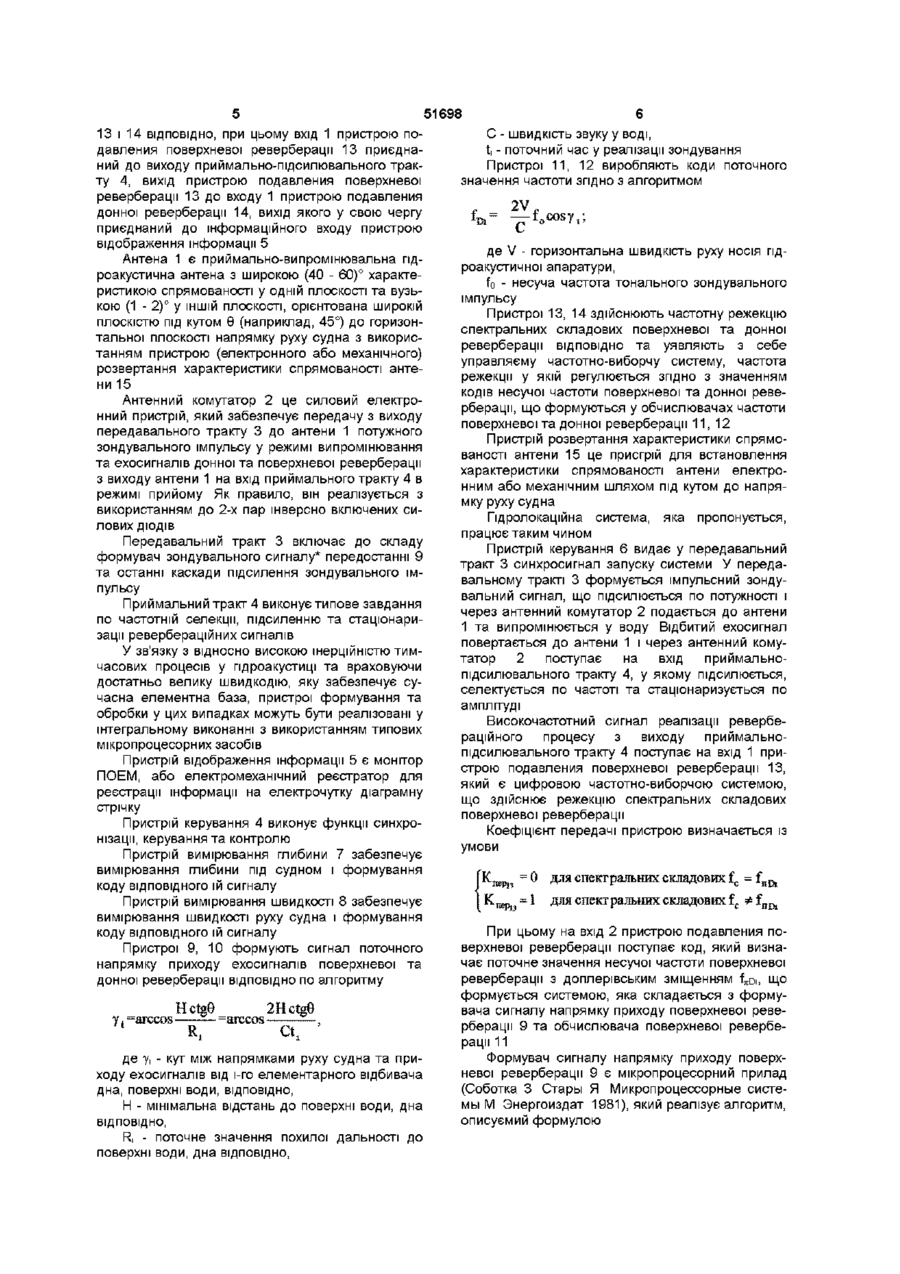
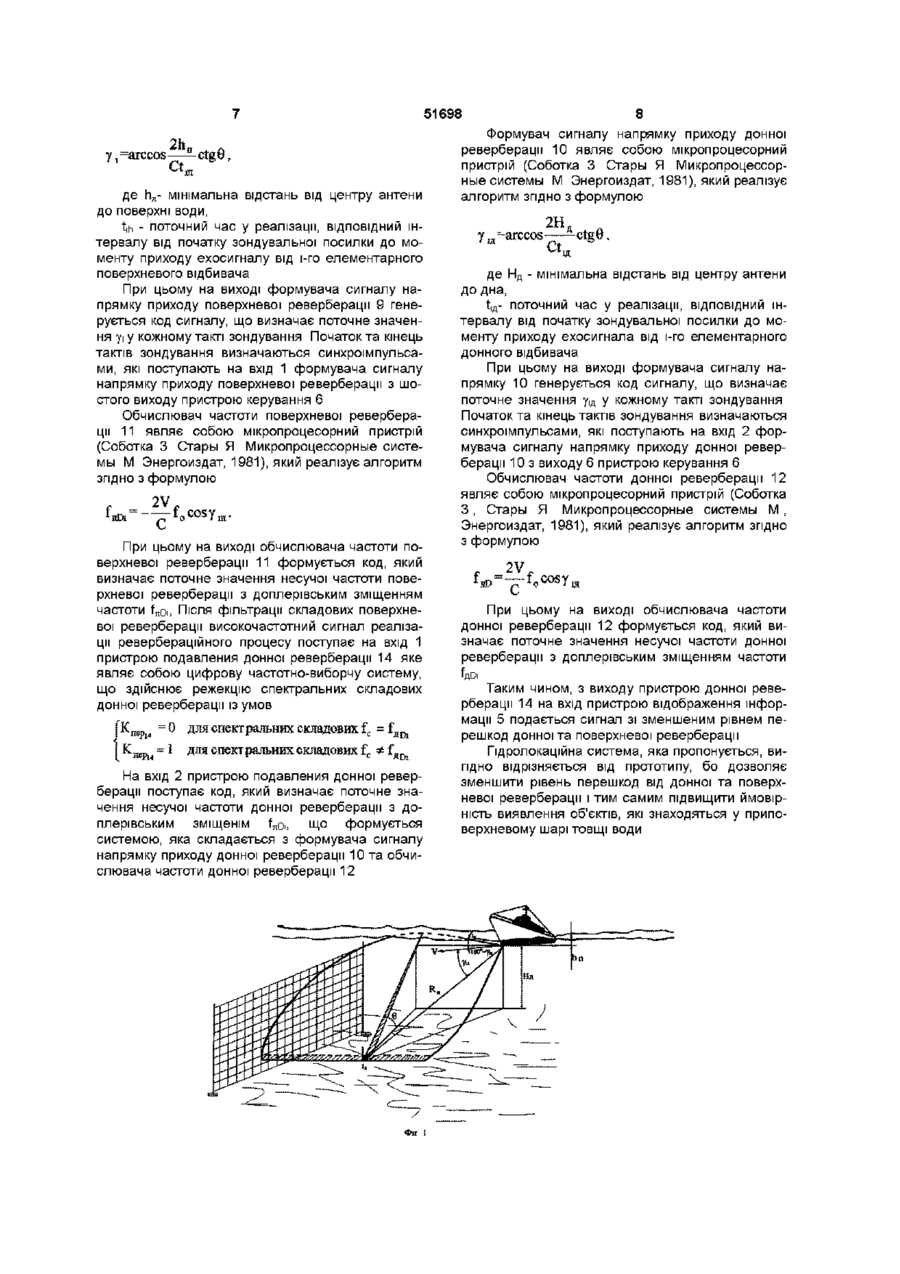
Гідролокаційна система, яка містить антену, антенний комутатор, передавальний тракт, приймально-підсилювальний тракт, пристрій відображення інформації, пристрій керування гідролокаційною системою, пристрій вимірювання глибини та пристрій вимірювання швидкості руху судна, у якій вихід антени через антенний комутатор підключений до виходу передавального тракту та входу приймально-підсилювального тракту, перший, другий, третій, четвертий та п'ятий керуючі виходи пристрою керування з'єднані з керуючими входами передавального тракту, приймально-підсилювального тракту, пристрою відображення інформації, пристрою вимірювання глибини та пристрою вимірювання швидкості руху судна ВІДПОВІДНО, яка відрізняється тим, що до стики спрямованості антени, формувач сигналу напряму приходу поверхневої реверберації, формувач сигналу напряму приходу донної реверберації, обчислювач частоти поверхневої реверберації, обчислювач частоти донної реверберації, пристрій подавления поверхневої реверберації та пристрій подавления донної реверберації, при цьому керуючий вхід антени з'єднаний з виходом пристрою розгортання характеристики спрямованості антени, перші входи формувачів сигналів напряму приходу поверхневої та донної реверберації приєднані до шостого керуючого виходу пристрою керування системою, виходи формувачів окремо з'єднані з першими входами обчислювачів частоти поверхневої та донної реверберації ВІДПОВІДНО, а їх другі входи з'єднані з виходом пристрою вимірювання швидкості руху судна, виходи обчислювачів окремо з'єднані з керуючими входами пристрою подавления поверхневої та донної реверберації ВІДПОВІДНО, а другий керуючий вхід формувача сигналу напряму приходу донної реверберації з'єднаний з виходом пристрою вимірювання глибини, при цьому сигнальний вхід пристрою подавления поверхневої реверберації підключений до виходу приймальнопідсилювального тракту, а вихід - до сигнального входу пристрою подавления донної реверберації, вихід якого, в свою чергу, під'єднаний до інформаційного входу пристрою відображення інформації 00 О> (О ю датково уведені пристрій розгортання характери Винахід належить до галузі гідроакустики, та може бути використано при пошуку об'єктів, що знаходяться у товщі води Наприклад, притоплені технічні об'єкти, топляки, рибальські мережі і т п ВІДОМІ гідролокаційні системи, які використовують метод ехолотування, заснований на явищі практично прямолінійності поширення, що дозволяє визначати дальність до об'єкта по часовому запізнюванню ехосигналу відносно зондувального, а також на зв'язку енергетичних та спектральних параметрів відбитих сигналів з фізичної природою об'єктів, та які включають у собі антену, антенний О комутатор, приимально-підсилювальнии тракт, передавальний тракт та пристрій керування (кн Богородский А В и др «Гидроакустическая техника исследования и освоения океана», - Л , Гидрометеоиздат, 1984, стр 27 - 29) Найбільш близьким до пропонованого винаходу є гідролокатор бокового огляду, описаний у (кн Богородський А В и др «Гидроакустическая техника исследования и освоения океана» - Л Гидрометеоиздат, 1984, стр 98 -99), і який включає у собі антену, антенний комутатор, передавальний тракт, приймально-підсилювальний тракт, пристрій 51698 напрямку приходу поверхневої та донної реверберації підключені до шостого керуючого виводу пристрою керування системою, виходи формувачів окремо з'єднані з першими входами обчислювачів частоти поверхневої та донної реверберації ВІДПОВІДНО, а їх другі входи з'єднані з виходом пристрою вимірювання швидкості руху судна, виходи обчислювачів роздільно з'єднані з управляючими входами пристроїв подавления поверхневої та донної реверберації ВІДПОВІДНО, а другій керуючий вхід формувача сигналу направлення приходу донної реверберації з'єднаний з виходом пристрою вимірювання глибини, при цьому сигнальний вхід пристрою подавления поверхневої реверберації з'єднаний з виходом приймальнопідсилювального тракту, а вихід під'єднаний до сигнального входу пристрою подавления донної реверберації, вихід якого у свою чергу, під'єднаний до інформаційного входу пристрою відображення Характеристика спрямованості антени гідроінформації локатора бокового огляду [ широка (« 40 - 60)° у вертикальній та вузька («1,5- 2)° у горизонтальній Згадані ознаки дають можливість підвищувати площині] орієнтована під прямим кутом до напряймовірність виявлення об'єктів, розташованих у мку руху судна При цьому огляд та реєстрація товщі води, за рахунок подавления донної та позображення елементів звукорозсіючого середовиверхневої реверберації ща у товщі води та донної поверхні здійснюється у На фіг 1 приведено малюнок, який ілюструє прямокутній системі координат «похила дальність принцип дії гідролокаційної системи, - шляхова дальність» На фіг 2 приведена схема запропонованої гідролокаційної системи Огляд по першій координаті здійснюється за Гідролокаційна система, яка заявляється (див рахунок поширення саме цих зондувальних імпуфіг 2) містить антену 1, антенний комутатор 2, пельсів, огляд по другій - за рахунок поступального редавальний тракт 3, приймально-підсилювальний руху судна Однак, ймовірність виявлення об'єктів, тракт 4, пристрій відображення інформації 5, прирозташованих у товщі води, які ехолоцируються стрій керування 6, пристрій вимірювання глибини гідролокаційною системою бокового огляду, зни7, пристрій вимірювання швидкості руху 8, формужується внаслідок того, що під час прийому об'ємвач сигналу направлення приходу поверхневої ної реверберації їх пошук ускладнюється наявнісреверберації 9, формувач сигналу направлення тю також ехосигналів донної та поверхневої приходу донної реверберації 10, обчислювач часреверберації тоти поверхневої реверберації 11, обчислювач Метою винаходу є підвищення ймовірності вичастоти донної реверберації 12, пристрій подавявлення об'єктів, розташованих у товщі води ления поверхневої реверберації 13, пристрій поВстановлена мета досягається тим, що у гіддавления донної реверберації 14 та пристрій розролокаційну систему, яка включає у собі антену, вертання характеристики спрямованості антени антенний комутатор, передавальний тракт, при15 При цьому вихід антени 1 через антенний коймально-підсилювальний тракт, пристрій відобрамутатор 2 приєднаний до виходу передавального ження інформації, пристрій керування гідролокатракту 3 та інформаційного входу приймальноційної системою, пристрій, який вимірює глибину підсилювального тракту 4, першій вихід пристрою та пристрій вимірювання швидкості руху судна, у керування з'єднаний з керуючим входом передаякий при цьому вихід антени через антенний комувального тракту 3, другий - з керуючим входом татор підключений до виходу передавального траприймально-підсилювального тракту 4, третій - з кту та входу приймально-підсилювального тракту, керуючим входом пристрою відображення інфорперший, другий, третій, четвертий та п'ятий керумації 5, четвертий - з керуючим входом пристрою ючі виходи пристрою керування з'єднані з керуювимірювання глибини 7, п'ятий - з керуючим вхочими входами передавального тракту, приймальдом пристрою вимірювання швидкості руху 8, шосно-підсилювального тракту, пристрою тий - приєднаний до перших входів формувачів відображення інформації, пристрою вимірювання сигналу напрямку приходу поверхневої та донної глибини та пристрою швидкості руху судна ВІДПОреверберації 9, 10, ВІДПОВІДНО, крім того вхід 2 фоВІДНО, уведені пристрій розвертання характеристирмувача сигналу напрямку приходу донної реверки спрямованості антени, формувач сигналу наберації 10 приєднаний до виходу пристою вимірюпрямку приходу поверхневої реверберації, вання глибини 7, виходи формувачів сигналів формувач сигналу напрямку приходу донної ревенапрямку приходу поверхневої та донної реверберберації, обчислювач частоти поверхневої реверрації 9, 10 з'єднані з першими входами обчислюберації, обчислювач частоти донної реверберації, вачів частоти поверхневої та донної реверберації пристрій подавления донної реверберації, при11, 12 ВІДПОВІДНО, а їх другі входи з'єднані до вистрій подавления поверхневої реверберації, при ходу пристрою вимірювання швидкості руху 8, вицьому керуючий вхід антени з'єднаний з виходом ходи обчислювачів з'єднані з входами 2 пристроїв пристрою розвертання характеристики спрямоваподавления поверхневої та донної реверберації ності антени, перші входи формувачів сигналів відображення інформації та пристрій керування, а також пристрої, які вимірівають глибини та швидкість руху корабля, які описані у (кн, Богородский А В, и др «Гидроакустическая техника исследования и освоения океана» - Л Гидрометеоиздат, 1984, стр 136 -137), при цьому вихід антени гідролокатора бокового огляду через антенний комутатор, підключений до виходу передавального тракту та входу приймально-підсилювального тракту, перший , другий, третій, четвертий та п'ятий керуючі виходи пристрою керування з'єднані з керуючими входами передавального тракту, приймально-підсилювального тракту, пристрою відображення інформації, пристрою вимірювання глибини та пристрою вимірювання швидкості руху судна ВІДПОВІДНО, вихід приймальнопідсилювального тракту підключен до інформаційного входу пристрою відображення інформації 51698 13 і 14 ВІДПОВІДНО, при цьому вхід 1 пристрою подавления поверхневої реверберації 13 приєднаний до виходу приймально-підсилювального тракту 4, вихід пристрою подавления поверхневої реверберації 13 до входу 1 пристрою подавления донної реверберації 14, вихід якого у свою чергу приєднаний до інформаційного входу пристрою відображення інформації 5 Антена 1 є приймально-випромінювальна гідроакустична антена з широкою (40 - 60)° характеристикою спрямованості у одній плоскості та вузькою (1 - 2)° у ІНШІЙ плоскості, орієнтована широкій плоскістю під кутом Э (наприклад, 45°) до горизонтальної плоскості напрямку руху судна з використанням пристрою (електронного або механічного) розвертання характеристики спрямованості антени 15 Антенний комутатор 2 це силовий електронний пристрій, який забезпечує передачу з виходу передавального тракту 3 до антени 1 потужного зондувального імпульсу у режимі випромінювання та ехосигналів донної та поверхневої реверберації з виходу антени 1 на вхід приймального тракту 4 в режимі прийому Як правило, він реалізується з використанням до 2-х пар інверсно включених силових ДІОДІВ Передавальний тракт 3 включає до складу формувач зондувального сигналу* передостанні 9 та останні каскади підсилення зондувального імпульсу Приймальний тракт 4 виконує типове завдання по частотній селекції, підсиленню та стацюнаризацм ревербераційних сигналів У зв'язку з відносно високою шерційністю тимчасових процесів у гідроакустиці та враховуючи достатньо велику швидкодію, яку забезпечує сучасна елементна база, пристрої формування та обробки у цих випадках можуть бути реалізовані у інтегральному виконанні з використанням типових мікропроцесорних засобів Пристрій відображення інформації 5 є монітор ПОЕМ, або електромеханічний реєстратор для реєстрації інформації на електрочутку діаграмну стрічку Пристрій керування 4 виконує функції синхронізації, керування та контролю Пристрій вимірювання глибини 7 забезпечує вимірювання глибини під судном і формування коду ВІДПОВІДНОГО їй сигналу Пристрій вимірювання швидкості 8 забезпечує вимірювання швидкості руху судна і формування коду ВІДПОВІДНОГО їй сигналу Пристрої 9, 10 формують сигнал поточного напрямку приходу ехосигналів поверхневої та донної реверберації ВІДПОВІДНО ПО алгоритму HctgG 2Hctg9 у. ^arccos =arccos —-——, R, Ct, де у, - кут між напрямками руху судна та приходу ехосигналів від і-го елементарного відбивача дна, поверхні води, ВІДПОВІДНО, Н - мінімальна відстань до поверхні води, дна ВІДПОВІДНО, R, - поточне значення похилої дальності до поверхні води, дна ВІДПОВІДНО, С - швидкість звуку у воді, t, - поточний час у реалізації зондування Пристрої 11, 12 виробляють коди поточного значення частоти згідно з алгоритмом f = — f cos Di c о де V - горизонтальна швидкість руху носія гідроакустичної апаратури, fo - несуча частота тонального зондувального імпульсу Пристрої 13, 14 здійснюють частотну режекцію спектральних складових поверхневої та донної реверберації ВІДПОВІДНО та уявляють з себе управляєму частоти о-виборчу систему, частота режекцм у якій регулюється згідно з значенням кодів несучої частоти поверхневої та донної реверберації, що формуються у обчислювачах частоти поверхневої та донної реверберації 11,12 Пристрій розвертання характеристики спрямованості антени 15 це присгрій для встановлення характеристики спрямованості антени електронним або механічним шляхом під кутом до напрямку руху судна Гідролокаційна система, яка пропонується, працює таким чином Пристрій керування 6 видає у передавальний тракт 3 синхросигнал запуску системи У передавальному тракті 3 формується імпульсний зондувальний сигнал, що підсилюється по потужності і через антенний комутатор 2 подається до антени 1 та випромінюється у воду Відбитий ехосигнал повертається до антени 1 і через антенний комутатор 2 поступає на вхід приймальнопідсилювального тракту 4, у якому підсилюється, селектується по частоті та стацюнаризується по амплітуді Високочастотний сигнал реалізації ревербераційного процесу з виходу приймальнопідсилювального тракту 4 поступає на вхід 1 пристрою подавления поверхневої реверберації 13, який є цифровою частоти о-виборчою системою, що здійснює режекцію спектральних складових поверхневої реверберації Коефіцієнт передачі пристрою визначається із умови \Клер., = 0 ДДя спектральних складових fc = fnEh 1 ^-пер, = 1 •^ля спектральних складових fc Ф fnDi При цьому на вхід 2 пристрою подавления поверхневої реверберації поступає код, який визначає поточне значення несучої частоти поверхневої р е в е р б е р а ц і ї 3 ДОПЛеріВСЬКИМ ЗМІЩеННЯМ f^Di, ЩО формується системою, яка складається з формувача сигналу напрямку приходу поверхневої реверберації 9 та обчислювача поверхневої реверберації 11 Формувач сигналу напрямку приходу поверхневої реверберації 9 є мікропроцесорний прилад (Соботка 3 Стары Я Микропроцессорные системы М Энергоиздат 1981), який реалізує алгоритм, описуємий формулою 51698 ctg8 у, =arccos де пл- мінімальна відстань від центру антени до поверхні води, t,h - поточний час у реалізації, ВІДПОВІДНИЙ інтервалу від початку зондувальної посилки до моменту приходу ехосигналу від і-го елементарного поверхневого відбивача При цьому на виході формувача сигналу напрямку приходу поверхневої реверберації 9 генерується код сигналу, що визначає поточне значення уі у кожному такті зондування Початок та кінець тактів зондування визначаються синхроімпульсами, які поступають на вхід 1 формувача сигналу напрямку приходу поверхневої реверберації з шостого виходу пристрою керування 6 Обчислювач частоти поверхневої реверберації 11 являє собою мікропроцесорний пристрій (Соботка 3 Стары Я Микропроцессорные системы М Энергоиздат, 1981), який реалізує алгоритм згідно з формулою , 2V. При цьому на виході обчислювача частоти поверхневої реверберації 11 формується код, який визначає поточне значення несучої частоти поверхневої реверберації з доплерівським зміщенням частоти fnDi, Після фільтрації складових поверхневої реверберації високочастотний сигнал реалізації ревербераційного процесу поступає на вхід 1 пристрою подавления донної реверберації 14 яке являє собою цифрову частоти о-виборчу систему, що здійснює режекцію спектральних складових донної реверберації із умов рК,^ =0 для спектральних складових fc =fHDj 1 К ц е р ц = 1 Д я я с п е к т р а л ь н и х с к л а д о в и х f c Ф £ Д О І На вхід 2 пристрою подавления донної реверберації поступає код, який визначає поточне значення несучої частоти донної реверберації з доплерівським зміщенім тлоі, що формується системою, яка складається з формувача сигналу напрямку приходу донної реверберації 10 та обчислювача частоти донної реверберації 12 8 Формувач сигналу напрямку приходу донної реверберації 10 являє собою мікропроцесорний пристрій (Соботка 3 Стары Я Микропроцессорные системы М Энергоиздат, 1981), який реалізує алгоритм згідно з формулою 2 Н « • У-,- a r c c o sC —. , - c t t t де Нд - мінімальна відстань від центру антени до дна, t,fl- поточний час у реалізації, ВІДПОВІДНИЙ інтервалу від початку зондувальної посилки до моменту приходу ехосигнала від і-го елементарного донного відбивача При цьому на виході формувача сигналу напрямку 10 генерується код сигналу, що визначає поточне значення ущ у кожному такті зондування Початок та кінець тактів зондування визначаються синхроімпульсами, які поступають на вхід 2 формувача сигналу напрямку приходу донної реверберації 10 з виходу 6 пристрою керування 6 Обчислювач частоти донної реверберації 12 являє собою мікропроцесорний пристрій (Соботка З, Стары Я Микропроцессорные системы М , Энергоиздат, 1981), який реалізує алгоритм згідно з формулою , 2Vf При цьому на виході обчислювача частоти донної реверберації 12 формується код, який визначає поточне значення несучої частоти донної реверберації з доплерівським зміщенням частоти fflDi Таким чином, з виходу пристрою донної реверберації 14 на вхід пристрою відображення інформації 5 подається сигнал зі зменшеним рівнем перешкод донної та поверхневої реверберації Гідролокаційна система, яка пропонується, вигідно відрізняється від прототипу, бо дозволяє зменшити рівень перешкод від донної та поверхневої реверберації і тим самим підвищити ймовірність виявлення об'єктів, які знаходяться у приповерхневому шарі товщі води 51698 10 1 Пристрій вимірювання глибини Антена Антенний комутатор Передавальний тракт Пристрій 15 розвертання антени Приймально- 4 підсилювальний тракт Пристрій керування 13 Пристрій подавления поверхневої Формувач 9 сигналу напрямку приходу повєрхне&ої рдвербершвї Пристрій 5 відображенні? шформада б 7 Пристрій вимірювання: швидкості Формувач 10 сигналу напрямку приходу донної ревербардціі 1 14 Пристрій подавления донної 11 Обчислювач частоти поверхневої Фіг 2 ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна (044)456-20 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71 12 Обчислювач частоти донної реверберації
ДивитисяДодаткова інформація
Назва патенту англійськоюHydrosonar system
Автори англійськоюKlochan Yurii Anatoliiovych, Honchar Anatolii Ivanovych, Shlychek Liubov Ivanivna, Klochan Valentyna Ivanivna
Назва патенту російськоюГидролокационная система
Автори російськоюКлочан Юрий Анатолиевич, Гончар Анатолий Иванович, Шличек Любовь Ивановна, Клочан Валентина Ивановна
МПК / Мітки
МПК: G01S 15/00
Мітки: система, гідролокаційна
Код посилання
<a href="https://ua.patents.su/5-51698-gidrolokacijjna-sistema.html" target="_blank" rel="follow" title="База патентів України">Гідролокаційна система</a>
Гідролокаційна система бокового огляду
Номер патенту: 26242
Опубліковано: 19.07.1999
Автори: Клочан Валентина Іванівна, Шличек Любов Іванівна, Клочан Юрій Анатолійович, Гончар Анатолій Іванович
МПК: G01S 15/00, G01V 1/38
Мітки: система, бокового, огляду, гідролокаційна
Формула / Реферат:
Гидролокационная система бокового обзора, содержащая для каждого из двух бортов антенну, приемный тракт, усилитель зондирующих импульсов и формирователь зондирующих импульсов, причем вход первой антенны соединен с выходом первого усилителя зондирующих импульсов, входом подключенного к выходу первого формирователя зондирующих импульсов, и с сигнальным входом первого приемного тракта, выход которого подключен к первому входу регистратора, а...
Спосіб виявлення нафтових забруднень на водній поверхні
Номер патенту: 47201
Опубліковано: 17.06.2002
Автори: Черненька Валентина Петрівна, Дівізінюк Сергій Михайлович, Лазаренко Сергій Володимирович, Дівізінюк Михайло Михайлович
МПК: G01S 17/06
Мітки: водний, виявлення, поверхні, забруднень, спосіб, нафтових
Формула / Реферат:
Спосіб виявлення нафтових забруднень на водній поверхні, заснований на випромінюванні акустичного сигналу з наступним прийомом його відбитку від неоднорідних часток водяного середовища і відображенням на індикаторах, який відрізняється тим, що додатково реєструють інтенсивність поверхневої реверберації і по її збільшенню в порівнянні з фоном визначають наявність нафтових забруднень на водній поверхні.
Мікрохвильова інтегрована телерадіоінформаційна система “мітріс-к”
Номер патенту: 50877
Опубліковано: 15.11.2002
Автори: Савченко Олексій Якович, Наритник Теодор Миколайович, Ільченко Михайло Юхимович, Казіміренко Валерій Якович, Побережний Олег Васильович, Плаксюк Юрій Олександрович, Войтенко Олександр Григорович
МПК: H04B 7/165
Мітки: мітріс-к, інтегрована, телерадіоінформаційна, система, мікрохвильова
Формула / Реферат:
1. Мікрохвильова інтегрована телерадіоінформаційна система "МІТРІС- К", що складається з підсистем прийому, формування та опрацювання інформації, центральної станції, яка містить багатоканальний НВЧ передавач із блоками частотної модуляції, сполученими з блоками фільтрації, посилення і перетворення частотно-модульованих сигналів у короткохвильову частину сантиметрового діапазону хвиль, усі канали НВЧ передавача об'єднані з...
Пасивна система вимірювання координат джерел випромінювання
Номер патенту: 41466
Опубліковано: 17.09.2001
Автор: Черниш Станіслав Костянтинович
Мітки: координат, випромінювання, вимірювання, пасивна, система, джерел
Формула / Реферат:
Пасивна система вимірювання координат джерел випромінювання, що містить в собі декілька (як мінімум дві) просторово рознесених пеленгаторних станцій і центральний пост, з'єднаних двостороннім каналом зв'язку, вихід центрального поста є виходом системи, яка відрізняється тим, що введені додатково на кожну пеленгаторну станцію система єдиного часу (ЄЧ) і блок вимірювання періоду обертання антени (ВПОА), а в центральний пост введені додатково...
Електромеханічна система дозування хімреагентів
Номер патенту: 44615
Опубліковано: 15.02.2002
Автори: Удод Тарас Євгенович, Гресько Валентин Антонович, Ісаков Глеб Володимирович, Вороновський Геннадій Кирилович, Ісаков Володимир Миколайович
МПК: H02P 27/04, F22D 5/00
Мітки: хімреагентів, дозування, система, електромеханічна
Формула / Реферат:
Електромеханічна система дозування хімреагентів, яка містить насос-дозатор, вал якого під'єднаний до вала виконавчого асинхронного двигуна, на вхідний патрубок насоса-дозатора надходить з оперативної ємності дозований реагент, який з виходу насоса-дозатора транспортується в технологічну ємність або трубопровід з водою живлення, яка відрізняється тим, що статорні обмотки виконавчого асинхронного двигуна насоса-дозатора підключені до вихідних...
Наступний патент: Спосіб отримання котоніну з короткого луб’яного волокна і установка для його здійснення
Випадковий патент: Кабель-щогла пускової установки ракети