Гідролокаційна система бокового огляду
Номер патенту: 26242
Опубліковано: 19.07.1999
Автори: Гончар Анатолій Іванович, Клочан Юрій Анатолійович, Клочан Валентина Іванівна, Шличек Любов Іванівна
Формула / Реферат
Гидролокационная система бокового обзора, содержащая для каждого из двух бортов антенну, приемный тракт, усилитель зондирующих импульсов и формирователь зондирующих импульсов, причем вход первой антенны соединен с выходом первого усилителя зондирующих импульсов, входом подключенного к выходу первого формирователя зондирующих импульсов, и с сигнальным входом первого приемного тракта, выход которого подключен к первому входу регистратора, а управляющий вход - к первому выходу управляющего устройства, причем второй выход управляющего устройства соединен с управляющим входом регистратора, третий - с управляющим входом второго приемного тракта, а четвертый - с управляющим входом приемного тракта профилографа, сигнальным входом соединенного с приемной антенной профилографа, а выходом - со вторым входом регистратора, третий вход которого соединен с выходом второго приемного тракта, вход которого подключен ко входу второй антенны и выходу второго усилителя зондирующих импульсов, входом соединенного с выходом второго формирователя зондирующих импульсов, отличающаяся тем, что введены формирователь импульса глубины профилирования морского дна, формирователь периода зондирования и формирователь модулирующего сигнала с циклическим изменением закона модуляции несущей частоты зондирующего импульса, причем первый управляющий вход формирователя модулирующего сигнала с циклическим изменением закона модуляции соединен с пятым выходом управляющего устройства, второй управляющий вход - с выходом формирователя периода зондирования, первый выход - с входом первого формирователя зондирующих импульсов, а второй выход - с входом второго формирователя зондирующих импульсов, шестой выход управляющего устройства подключен к первому управляющему входу формирователя периода зондирования, к его второму управляющему входу подключен выход формирователя импульса глубины профилирования, вход которого соединен с выходом приемного тракта профилографа.
Текст
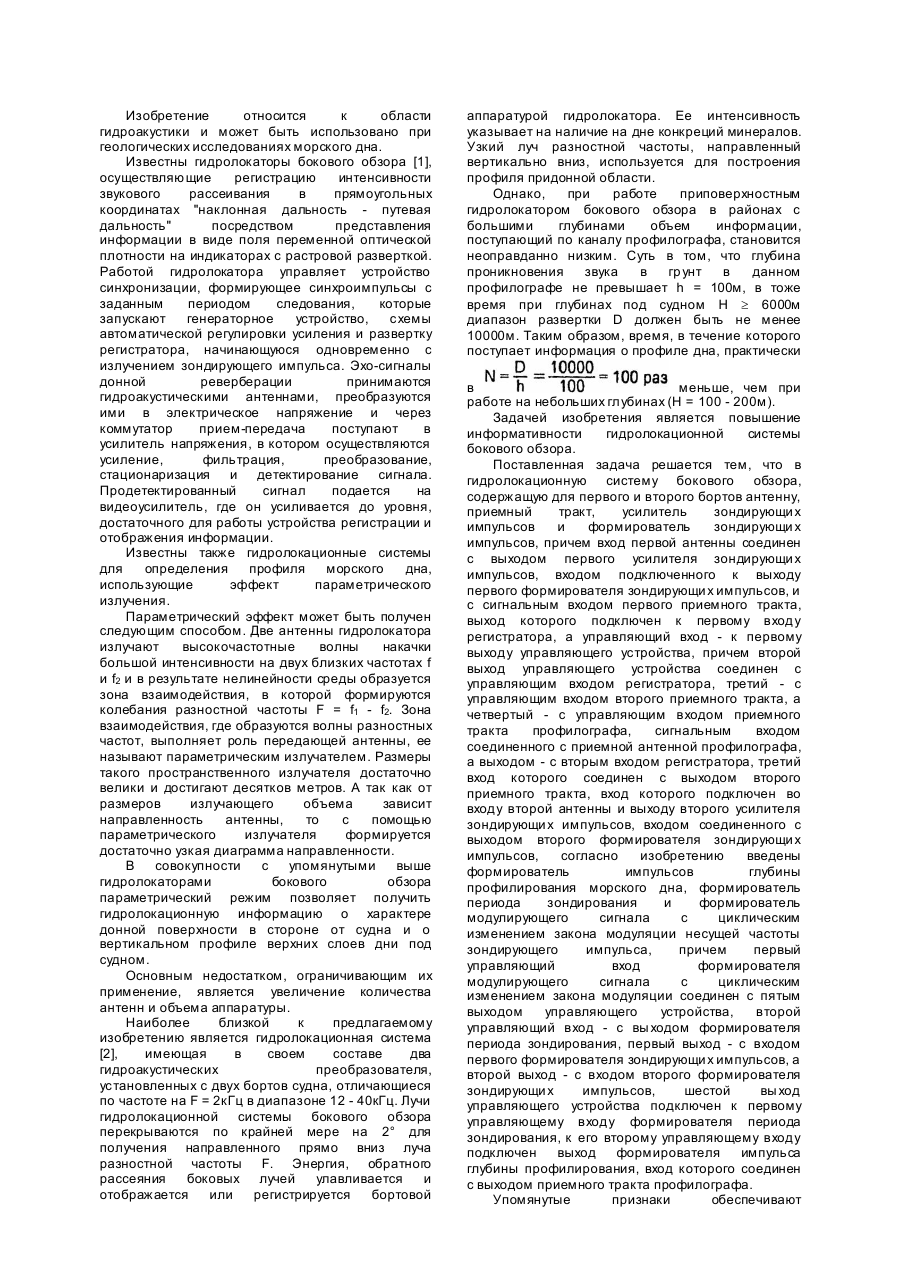
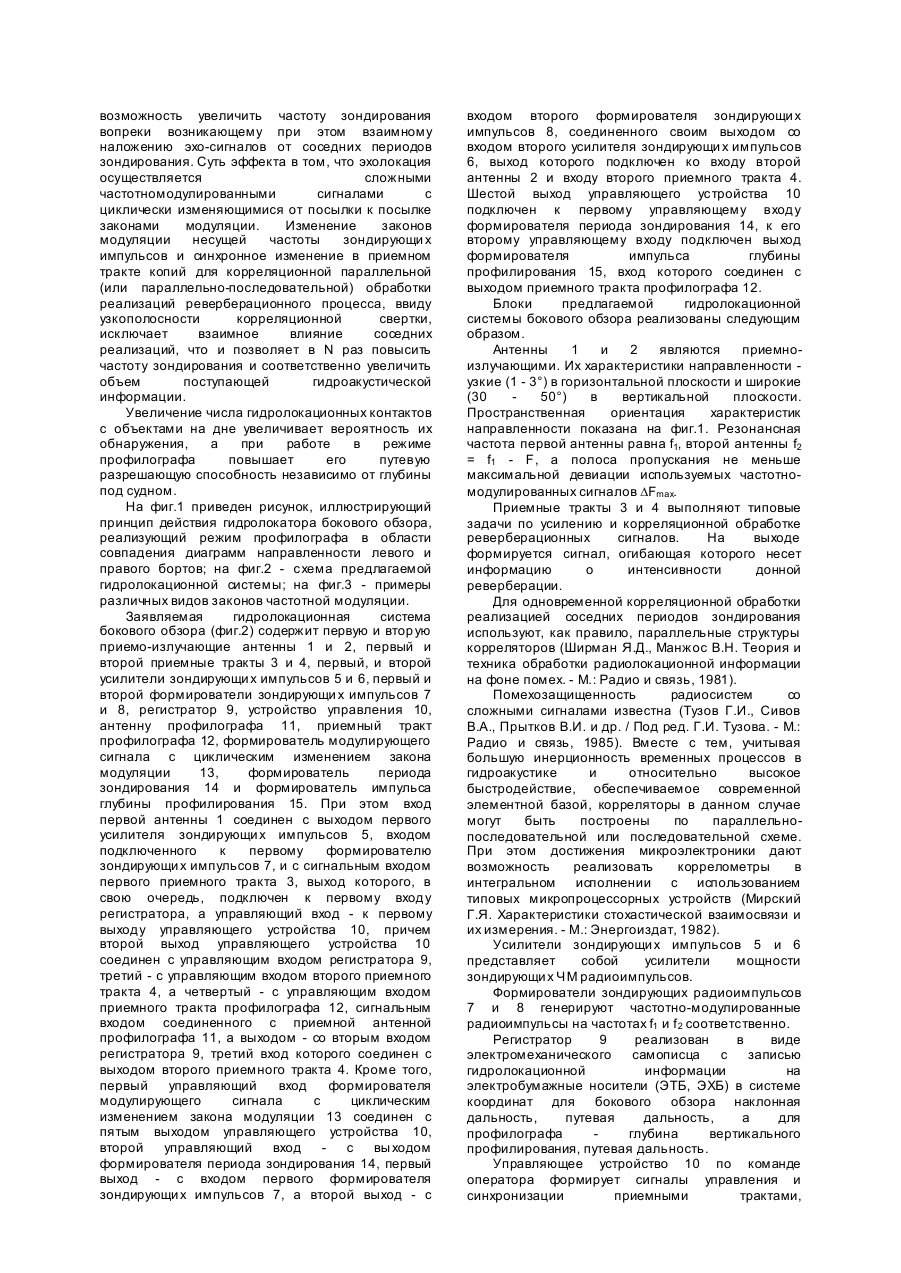
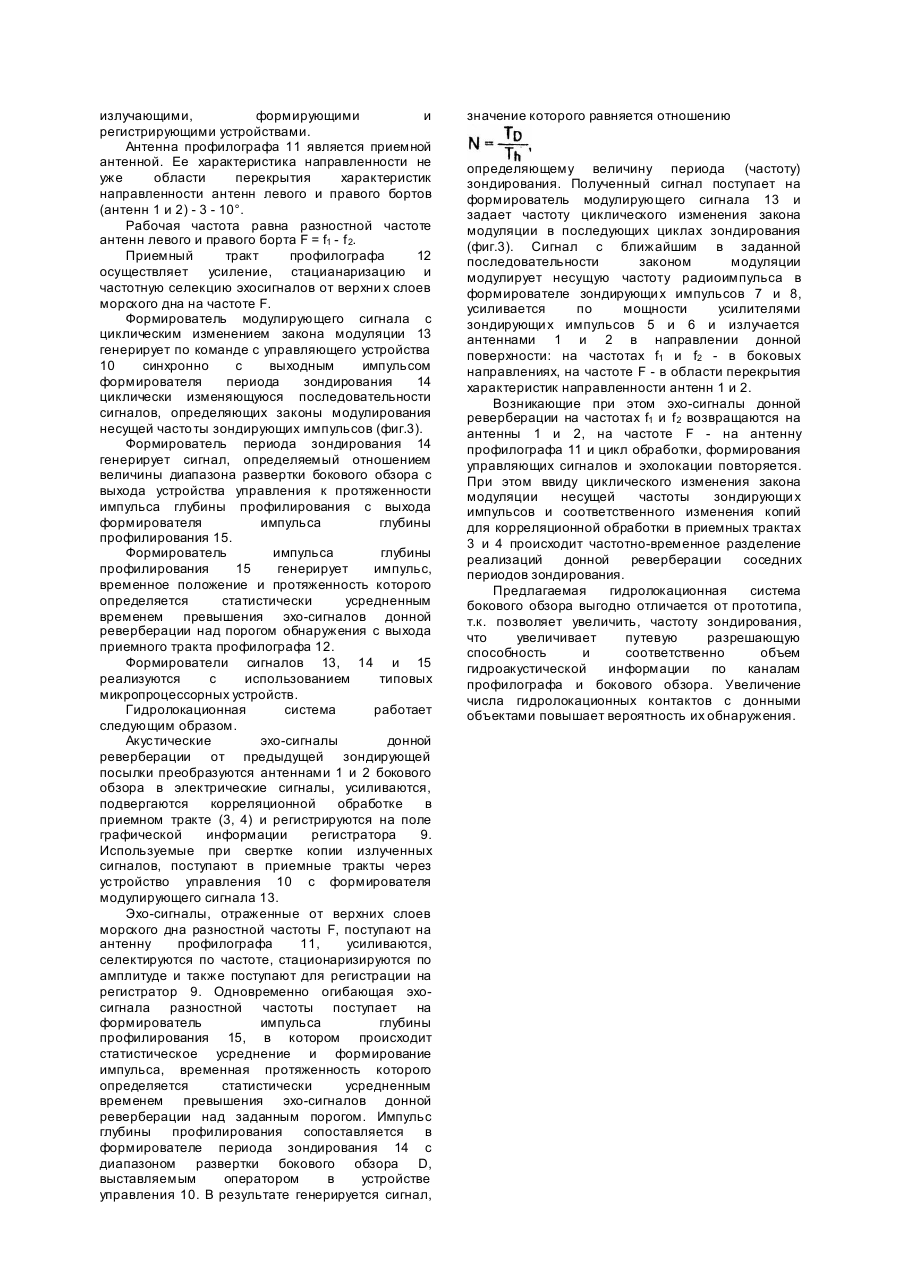
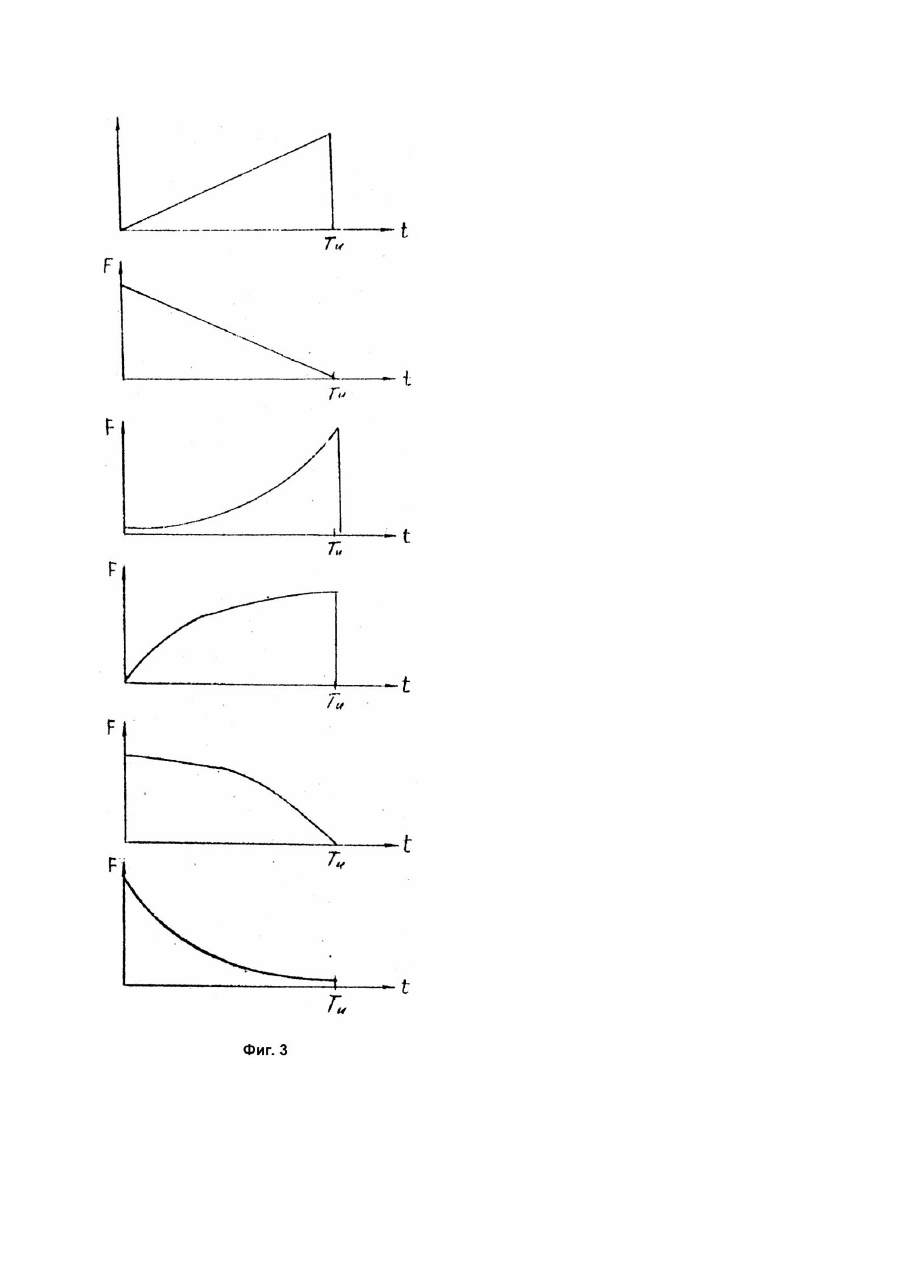
Изобретение относится к области гидроакустики и может быть использовано при геологических исследованиях морского дна. Известны гидролокаторы бокового обзора [1], осуществляющие регистрацию интенсивности звукового рассеивания в прямоугольных координатах "наклонная дальность - путевая дальность" посредством представления информации в виде поля переменной оптической плотности на индикаторах с растровой разверткой. Работой гидролокатора управляет устройство синхронизации, формирующее синхроимпульсы с заданным периодом следования, которые запускают генераторное устройство, схемы автоматической регулировки усиления и развертку регистратора, начинающуюся одновременно с излучением зондирующего импульса. Эхо-сигналы донной реверберации принимаются гидроакустическими антеннами, преобразуются ими в электрическое напряжение и через коммутатор прием-передача поступают в усилитель напряжения, в котором осуществляются усиление, фильтрация, преобразование, стационаризация и детектирование сигнала. Продетектированный сигнал подается на видеоусилитель, где он усиливается до уровня, достаточного для работы устройства регистрации и отображения информации. Известны также гидролокационные системы для определения профиля морского дна, использующие эффект параметрического излучения. Параметрический эффект может быть получен следующим способом. Две антенны гидролокатора излучают высокочастотные волны накачки большой интенсивности на двух близких частотах f и f2 и в результате нелинейности среды образуется зона взаимодействия, в которой формируются колебания разностной частоты F = f1 - f2. Зона взаимодействия, где образуются волны разностных частот, выполняет роль передающей антенны, ее называют параметрическим излучателем. Размеры такого пространственного излучателя достаточно велики и достигают десятков метров. А так как от размеров излучающего объема зависит направленность антенны, то с помощью параметрического излучателя формируется достаточно узкая диаграмма направленности. В совокупности с упомянутыми выше гидролокаторами бокового обзора параметрический режим позволяет получить гидролокационную информацию о характере донной поверхности в стороне от судна и о вертикальном профиле верхних слоев дни под судном. Основным недостатком, ограничивающим их применение, является увеличение количества антенн и объема аппаратуры. Наиболее близкой к предлагаемому изобретению является гидролокационная система [2], имеющая в своем составе два гидроакустических преобразователя, установленных с двух бортов судна, отличающиеся по частоте на F = 2кГц в диапазоне 12 - 40кГц. Лучи гидролокационной системы бокового обзора перекрываются по крайней мере на 2° для получения направленного прямо вниз луча разностной частоты F. Энергия, обратного рассеяния боковых лучей улавливается и отображается или регистрируется бортовой аппаратурой гидролокатора. Ее интенсивность указывает на наличие на дне конкреций минералов. Узкий луч разностной частоты, направленный вертикально вниз, используется для построения профиля придонной области. Однако, при работе приповерхностным гидролокатором бокового обзора в районах с большими глубинами объем информации, поступающий по каналу профилографа, становится неоправданно низким. Суть в том, что глубина проникновения звука в гр унт в данном профилографе не превышает h = 100м, в тоже время при глубинах под судном Н ³ 6000м диапазон развертки D должен быть не менее 10000м. Таким образом, время, в течение которого поступает информация о профиле дна, практически в меньше, чем при работе на небольших глубинах (H = 100 - 200м). Задачей изобретения является повышение информативности гидролокационной системы бокового обзора. Поставленная задача решается тем, что в гидролокационную систему бокового обзора, содержащую для первого и второго бортов антенну, приемный тракт, усилитель зондирующи х импульсов и формирователь зондирующи х импульсов, причем вход первой антенны соединен с выходом первого усилителя зондирующи х импульсов, входом подключенного к выходу первого формирователя зондирующи х импульсов, и с сигнальным входом первого приемного тракта, выход которого подключен к первому входу регистратора, а управляющий вход - к первому выходу управляющего устройства, причем второй выход управляющего устройства соединен с управляющим входом регистратора, третий - с управляющим входом второго приемного тракта, а четвертый - с управляющим входом приемного тракта профилографа, сигнальным входом соединенного с приемной антенной профилографа, а выходом - с вторым входом регистратора, третий вход которого соединен с выходом второго приемного тракта, вход которого подключен во входу второй антенны и выходу второго усилителя зондирующи х импульсов, входом соединенного с выходом второго формирователя зондирующи х импульсов, согласно изобретению введены формирователь импульсов глубины профилирования морского дна, формирователь периода зондирования и формирователь модулирующего сигнала с циклическим изменением закона модуляции несущей частоты зондирующего импульса, причем первый управляющий вход формирователя модулирующего сигнала с циклическим изменением закона модуляции соединен с пятым выходом управляющего устройства, второй управляющий вход - с вы ходом формирователя периода зондирования, первый выход - с входом первого формирователя зондирующи х импульсов, а второй выход - с входом второго формирователя зондирующи х импульсов, шестой вы ход управляющего устройства подключен к первому управляющему входу формирователя периода зондирования, к его второму управляющему входу подключен выход формирователя импульса глубины профилирования, вход которого соединен с выходом приемного тракта профилографа. Упомянутые признаки обеспечивают возможность увеличить частоту зондирования вопреки возникающему при этом взаимному наложению эхо-сигналов от соседних периодов зондирования. Суть эффекта в том, что эхолокация осуществляется сложными частотномодулированными сигналами с циклически изменяющимися от посылки к посылке законами модуляции. Изменение законов модуляции несущей частоты зондирующи х импульсов и синхронное изменение в приемном тракте копий для корреляционной параллельной (или параллельно-последовательной) обработки реализаций реверберационного процесса, ввиду узкополосности корреляционной свертки, исключает взаимное влияние соседних реализаций, что и позволяет в N раз повысить частоту зондирования и соответственно увеличить объем поступающей гидроакустической информации. Увеличение числа гидролокационных контактов с объектами на дне увеличивает вероятность их обнаружения, а при работе в режиме профилографа повышает его путевую разрешающую способность независимо от глубины под судном. На фиг.1 приведен рисунок, иллюстрирующий принцип действия гидролокатора бокового обзора, реализующий режим профилографа в области совпадения диаграмм направленности левого и правого бортов; на фиг.2 - схема предлагаемой гидролокационной системы; на фиг.3 - примеры различных видов законов частотной модуляции. Заявляемая гидролокационная система бокового обзора (фиг.2) содержит первую и втор ую приемо-излучающие антенны 1 и 2, первый и второй приемные тракты 3 и 4, первый, и второй усилители зондирующи х импульсов 5 и 6, первый и второй формирователи зондирующи х импульсов 7 и 8, регистратор 9, устройство управления 10, антенну профилографа 11, приемный тракт профилографа 12, формирователь модулирующего сигнала с циклическим изменением закона модуляции 13, формирователь периода зондирования 14 и формирователь импульса глубины профилирования 15. При этом вход первой антенны 1 соединен с выходом первого усилителя зондирующи х импульсов 5, входом подключенного к первому формирователю зондирующи х импульсов 7, и с сигнальным входом первого приемного тракта 3, выход которого, в свою очередь, подключен к первому входу регистратора, а управляющий вход - к первому выходу управляющего устройства 10, причем второй выход управляющего устройства 10 соединен с управляющим входом регистратора 9, третий - с управляющим входом второго приемного тракта 4, а четвертый - с управляющим входом приемного тракта профилографа 12, сигнальным входом соединенного с приемной антенной профилографа 11, а выходом - со вторым входом регистратора 9, третий вход которого соединен с выходом второго приемного тракта 4. Кроме того, первый управляющий вход формирователя модулирующего сигнала с циклическим изменением закона модуляции 13 соединен с пятым выходом управляющего устройства 10, второй управляющий вход с вы ходом формирователя периода зондирования 14, первый выход - с входом первого формирователя зондирующи х импульсов 7, а второй выход - с входом второго формирователя зондирующи х импульсов 8, соединенного своим выходом со входом второго усилителя зондирующи х импульсов 6, выход которого подключен ко входу второй антенны 2 и входу второго приемного тракта 4. Шестой выход управляющего устройства 10 подключен к первому управляющему входу формирователя периода зондирования 14, к его второму управляющему входу подключен выход формирователя импульса глубины профилирования 15, вход которого соединен с выходом приемного тракта профилографа 12. Блоки предлагаемой гидролокационной системы бокового обзора реализованы следующим образом. Антенны 1 и 2 являются приемноизлучающими. Их характеристики направленности узкие (1 - 3°) в горизонтальной плоскости и широкие (30 50°) в вертикальной плоскости. Пространственная ориентация характеристик направленности показана на фиг.1. Резонансная частота первой антенны равна f1, второй антенны f2 = f1 - F, а полоса пропускания не меньше максимальной девиации используемых частотномодулированных сигналов DFmax. Приемные тракты 3 и 4 выполняют типовые задачи по усилению и корреляционной обработке реверберационных сигналов. На выходе формируется сигнал, огибающая которого несет информацию о интенсивности донной реверберации. Для одновременной корреляционной обработки реализацией соседних периодов зондирования используют, как правило, параллельные структуры корреляторов (Ширман Я.Д., Манжос В.Н. Теория и техника обработки радиолокационной информации на фоне помех. - М.: Радио и связь, 1981). Помехозащищенность радиосистем со сложными сигналами известна (Тузов Г.И., Сивов В.А., Прытков В.И. и др. / Под ред. Г.И. Тузова. - М.: Радио и связь, 1985). Вместе с тем, учитывая большую инерционность временных процессов в гидроакустике и относительно высокое быстродействие, обеспечиваемое современной элементной базой, корреляторы в данном случае могут быть построены по параллельнопоследовательной или последовательной схеме. При этом достижения микроэлектроники дают возможность реализовать коррелометры в интегральном исполнении с использованием типовых микропроцессорных устройств (Мирский Г.Я. Характеристики стохастической взаимосвязи и их измерения. - М.: Энергоиздат, 1982). Усилители зондирующи х импульсов 5 и 6 представляет собой усилители мощности зондирующи х ЧМ радиоимпульсов. Формирователи зондирующих радиоимпульсов 7 и 8 генерируют частотно-модулированные радиоимпульсы на частотах f1 и f 2 соответственно. Регистратор 9 реализован в виде электромеханического самописца с записью гидролокационной информации на электробумажные носители (ЭТБ, ЭХБ) в системе координат для бокового обзора наклонная дальность, путевая дальность, а для профилографа глубина вертикального профилирования, путевая дальность. Управляющее устройство 10 по команде оператора формирует сигналы управления и синхронизации приемными трактами, излучающими, формирующими и регистрирующими устройствами. Антенна профилографа 11 является приемной антенной. Ее характеристика направленности не уже области перекрытия характеристик направленности антенн левого и правого бортов (антенн 1 и 2) - 3 - 10°. Рабочая частота равна разностной частоте антенн левого и правого борта F = f1 - f 2. Приемный тракт профилографа 12 осуществляет усиление, стацианаризацию и частотную селекцию эхосигналов от верхни х слоев морского дна на частоте F. Формирователь модулирующего сигнала с циклическим изменением закона модуляции 13 генерирует по команде с управляющего устройства 10 синхронно с выходным импульсом формирователя периода зондирования 14 циклически изменяющуюся последовательности сигналов, определяющих законы модулирования несущей часто ты зондирующих импульсов (фиг.3). Формирователь периода зондирования 14 генерирует сигнал, определяемый отношением величины диапазона развертки бокового обзора с выхода устройства управления к протяженности импульса глубины профилирования с выхода формирователя импульса глубины профилирования 15. Формирователь импульса глубины профилирования 15 генерирует импульс, временное положение и протяженность которого определяется статистически усредненным временем превышения эхо-сигналов донной реверберации над порогом обнаружения с выхода приемного тракта профилографа 12. Формирователи сигналов 13, 14 и 15 реализуются с использованием типовых микропроцессорных устройств. Гидролокационная система работает следующим образом. Акустические эхо-сигналы донной реверберации от предыдущей зондирующей посылки преобразуются антеннами 1 и 2 бокового обзора в электрические сигналы, усиливаются, подвергаются корреляционной обработке в приемном тракте (3, 4) и регистрируются на поле графической информации регистратора 9. Используемые при свертке копии излученных сигналов, поступают в приемные тракты через устройство управления 10 с формирователя модулирующего сигнала 13. Эхо-сигналы, отраженные от верхних слоев морского дна разностной частоты F, поступают на антенну профилографа 11, усиливаются, селектируются по частоте, стационаризируются по амплитуде и также поступают для регистрации на регистратор 9. Одновременно огибающая эхосигнала разностной частоты поступает на формирователь импульса глубины профилирования 15, в котором происходит статистическое усреднение и формирование импульса, временная протяженность которого определяется статистически усредненным временем превышения эхо-сигналов донной реверберации над заданным порогом. Импульс глубины профилирования сопоставляется в формирователе периода зондирования 14 с диапазоном развертки бокового обзора D, выставляемым оператором в устройстве управления 10. В результате генерируется сигнал, значение которого равняется отношению определяющему величину периода (частоту) зондирования. Полученный сигнал поступает на формирователь модулирующего сигнала 13 и задает частоту циклического изменения закона модуляции в последующих циклах зондирования (фиг.3). Сигнал с ближайшим в заданной последовательности законом модуляции модулирует несущую частоту радиоимпульса в формирователе зондирующи х импульсов 7 и 8, усиливается по мощности усилителями зондирующи х импульсов 5 и 6 и излучается антеннами 1 и 2 в направлении донной поверхности: на частотах f1 и f2 - в боковых направлениях, на частоте F - в области перекрытия характеристик направленности антенн 1 и 2. Возникающие при этом эхо-сигналы донной реверберации на частотах f1 и f 2 возвращаются на антенны 1 и 2, на частоте F - на антенну профилографа 11 и цикл обработки, формирования управляющих сигналов и эхолокации повторяется. При этом ввиду циклического изменения закона модуляции несущей частоты зондирующи х импульсов и соответственного изменения копий для корреляционной обработки в приемных трактах 3 и 4 происходит частотно-временное разделение реализаций донной реверберации соседних периодов зондирования. Предлагаемая гидролокационная система бокового обзора выгодно отличается от прототипа, т.к. позволяет увеличить, частоту зондирования, что увеличивает путевую разрешающую способность и соответственно объем гидроакустической информации по каналам профилографа и бокового обзора. Увеличение числа гидролокационных контактов с донными объектами повышает вероятность их обнаружения.
ДивитисяДодаткова інформація
Автори англійськоюKlochan Yurii Anatoliiovych, Honchar Anatolii Ivanovych, Shlychek Liubov Ivanivna, Klochan Valentyna Ivanivna
Автори російськоюКлочан Юрий Анатолиевич, Гончар Анатолий Иванович, Шличек Любовь Ивановна, Клочан Валентина Ивановна
МПК / Мітки
МПК: G01V 1/38, G01S 15/00
Мітки: бокового, гідролокаційна, огляду, система
Код посилання
<a href="https://ua.patents.su/5-26242-gidrolokacijjna-sistema-bokovogo-oglyadu.html" target="_blank" rel="follow" title="База патентів України">Гідролокаційна система бокового огляду</a>
Формувач імпульсів
Номер патенту: 4468
Опубліковано: 27.12.1994
Автори: Баран Петро Миколаєвич, Бугайчук Олексій Анатолієвич
МПК: H03K 5/153
Формула / Реферат:
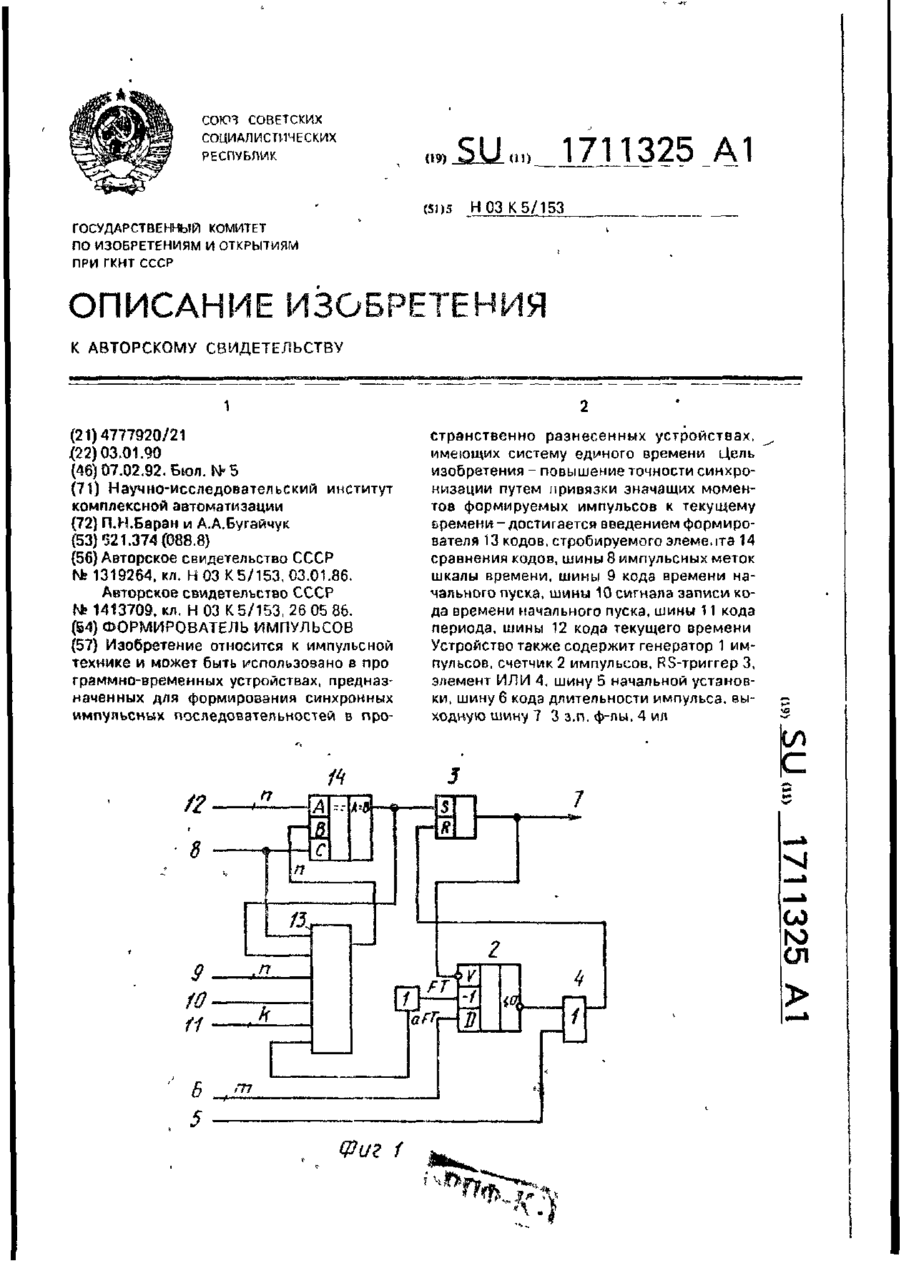
1. Формирователь импульсов, содержащий генератор импульсов, первый выход которого соединен со счетным входом счетчика импульсов, RS-триггер, элемент ИЛИ, шину начальной установки, шину кода длительности импульса, выходную шину, отличающийся тем, что, с целью повышения точности синхронизации путем привязки значащих моментов формируемых импульсов к текущему времени, в него введены шина импульсных меток шкалы времени, шина кода времени...
Сигналізатор граничної швидкості обертання валу
Номер патенту: 1333
Опубліковано: 25.03.1994
Автор: БЕЗСЧАСТНИЙ Василь Олексійович
МПК: G01P 3/42
Мітки: обертання, валу, швидкості, сигналізатор, граничної
Формула / Реферат:
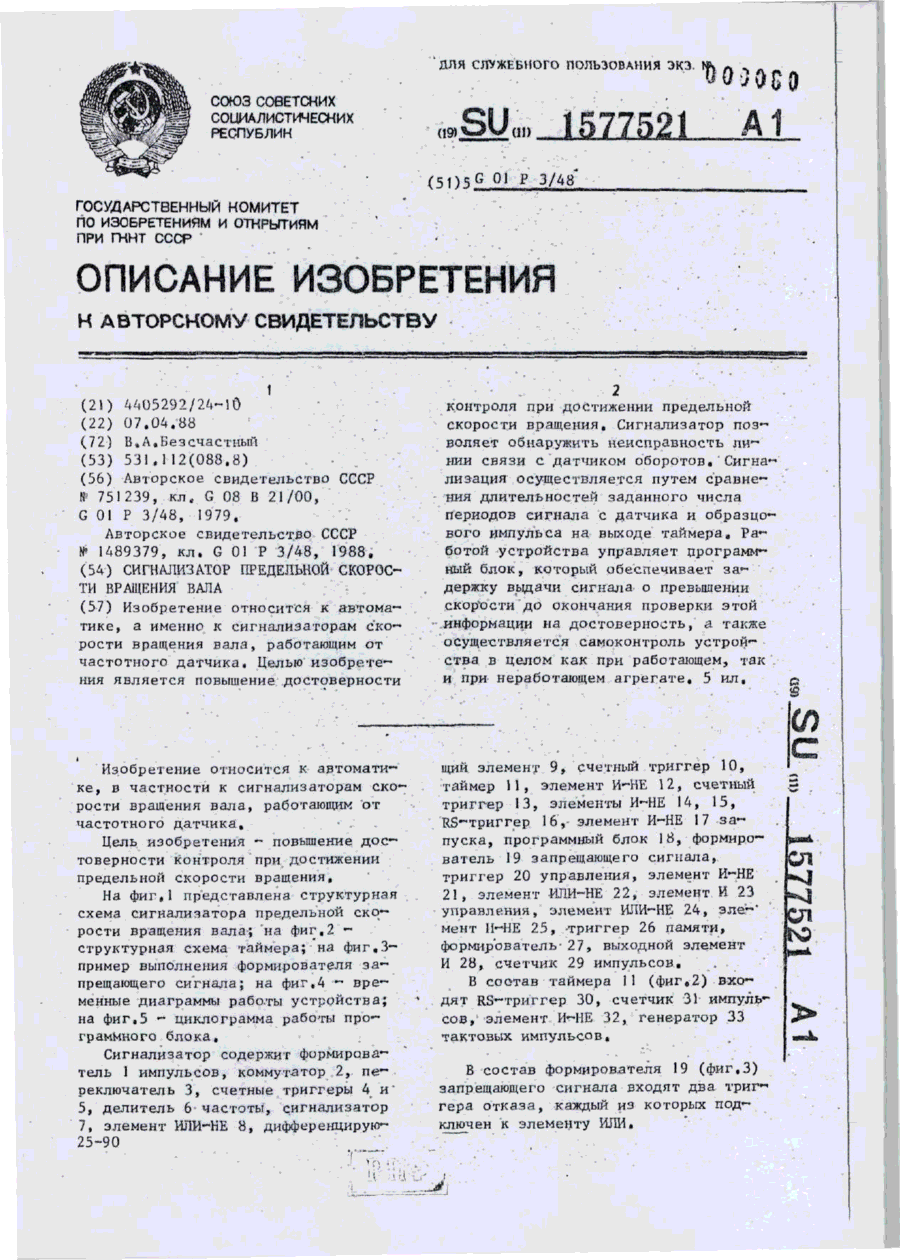
Сигнализатор предельной скорости вращения вала, содержащий первый формирователь импульсов, сигнализатор, коммутатор, переключатель, генератор тактовых импульсов, программный блок, первый и второй счетчики импульсов, формирователь запрещающего сигнала, второй формирователь, первый триггер, второй триггер и первый и второй элементы И, причем вход первого формирователя импульсов соединен с входом устройства, а выход — с входом сигнализатора...
Багатоканальний сигнатурний аналізатор

Номер патенту: 6922
Опубліковано: 31.03.1995
Автори: Журавель Олександр Павлович, Дяченко Олег Миколайович
МПК: G06F 11/00
Мітки: аналізатор, сигнатурний, багатоканальний
Текст:
...о е д и н е н с п р я м ы м выходом последнего разряда первого счетчика, инверсный выход последнего разряда которого соединен со вторым входом элемента ИЛИ и с тактовым входом первого триггера, инверсный выход которого соединен с первым выходом третьего элемента И, второй вход которого соединен с выходом элемента ИЛИ, выход третьего элемента И соединен с тактовым входом второго триггера, вторым входом первого элемента И и входом элемента...
Радіометрична система огляду
Номер патенту: 12470
Опубліковано: 28.02.1997
Автори: Пустоваров Володимир Євгенович, Прібилєв Юрій Борисович, Сотніков Олександр Михайлович, Ареп'єв Сергій Вікторович
МПК: G01R 29/08, G01S 5/02
Мітки: радіометрична, система, огляду
Формула / Реферат:
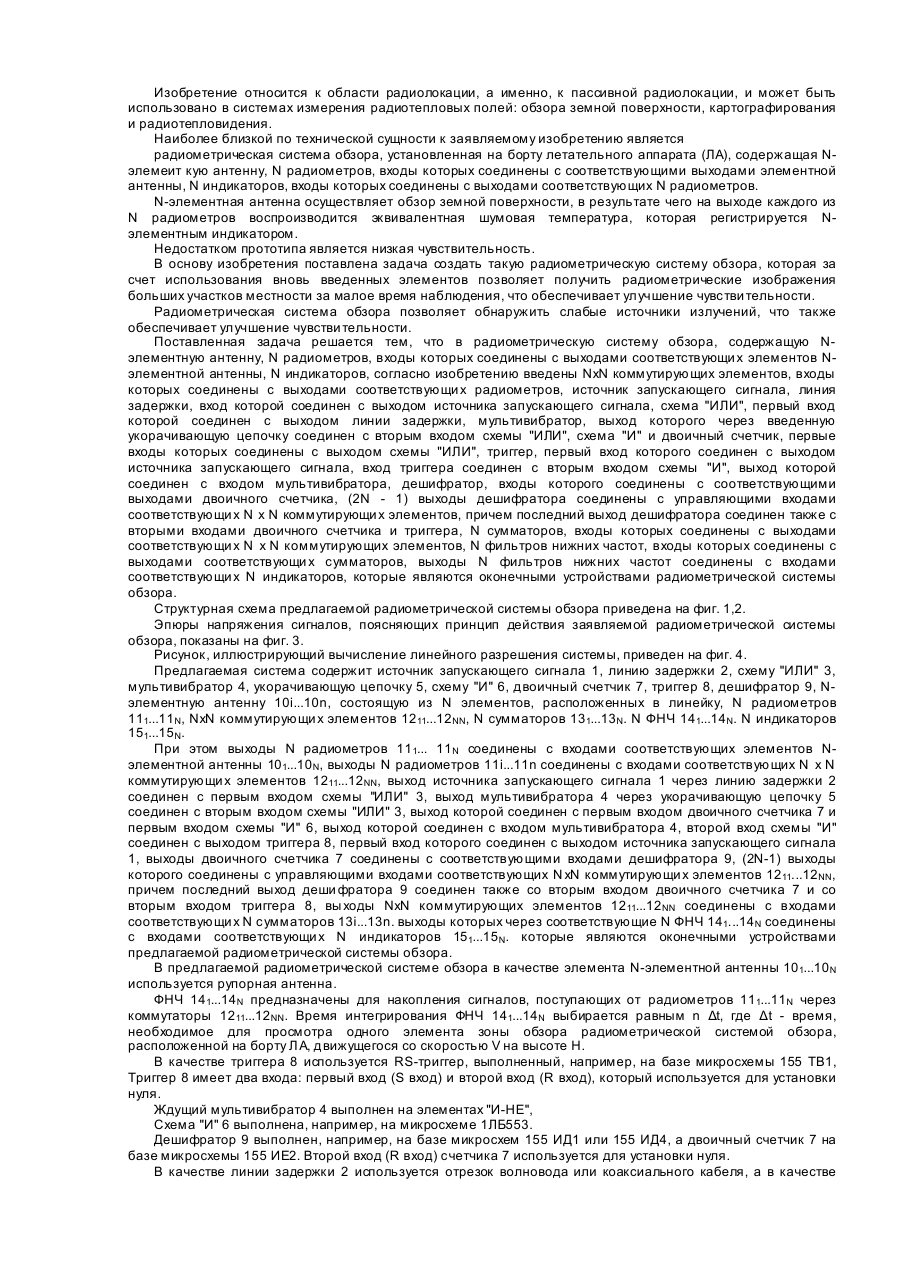
Радиометрическая система обзора, содержащая N-элементную антенну, N радиометров, входы которых соединены с выходами соответствующих элементов N-элемептиой антенны, N индикаторов, отличающаяся тем, что в нее введены N х N коммутирующих элементов, входы которых соединены с выходами соответствующих радиометров, источник запускающего сигнала, линия задержки, вход которой соединен с выходом источника запускающего сигнала, схема...
Формувач імпульсів
Номер патенту: 16962
Опубліковано: 29.08.1997
Автори: Поповиченко Сергій Дмитрович, Каленик Олександр Іванович
МПК: H03K 5/00
Формула / Реферат:
Формирователь импульсов, содержащий генератор тактовых импульсов, последовательно соединенный с делителем частоты, триггер, второй выход которого соединен с первым входом элемента И, оτличающийся тем, что, с целью расширения функциональных возможностей за счет формирования одиночного импульса, в него введены мультиплексор, второй триггер, причем делитель частоты подключен к первым входам мультиплексора, его вторые входы соединены с...
Наступний патент: Опалубка
Випадковий патент: Спосіб діагностики анемії при системному червоному вовчаку