Пристрій дистанційного контролю стану ізоляційного покриття підземних трубопроводів
Номер патенту: 54031
Опубліковано: 17.02.2003
Автори: Яворський Андрій Вікторович, Кисіль Ігор Степанович, Ващишак Сергій Петрович
Формула / Реферат
1. Пристрій дистанційного контролю стану ізоляційного покриття підземних трубопроводів, який складається з чотирьох перетворювачів магнітного поля, попередніх та вибіркових підсилювачів, аналого-цифрового перетворювача та дисплея, який відрізняється тим, що він додатково містить ще один перетворювач магнітного поля з попереднім та вибірковими підсилювачами і фільтром, мультиплексор, блок керування, блок приведення амплітуди, суматор, звуковий підсилювач, звуковий індикатор, детектор та цифровий індикатор.
2. Пристрій за п. 1, який відрізняється тим, що перетворювачі магнітного поля розміщені вертикально один над одним.
3. Пристрій за п. 1, який відрізняється тим, що п'ятий перетворювач магнітного поля разом з попереднім підсилювачем, вибірковим підсилювачем та інвертором утворюють компенсуючий завади канал.
4. Пристрій за п. 1, який відрізняється тим, що суматор, звуковий підсилювач та звуковий індикатор утворюють паралельний контрольний канал.
Текст
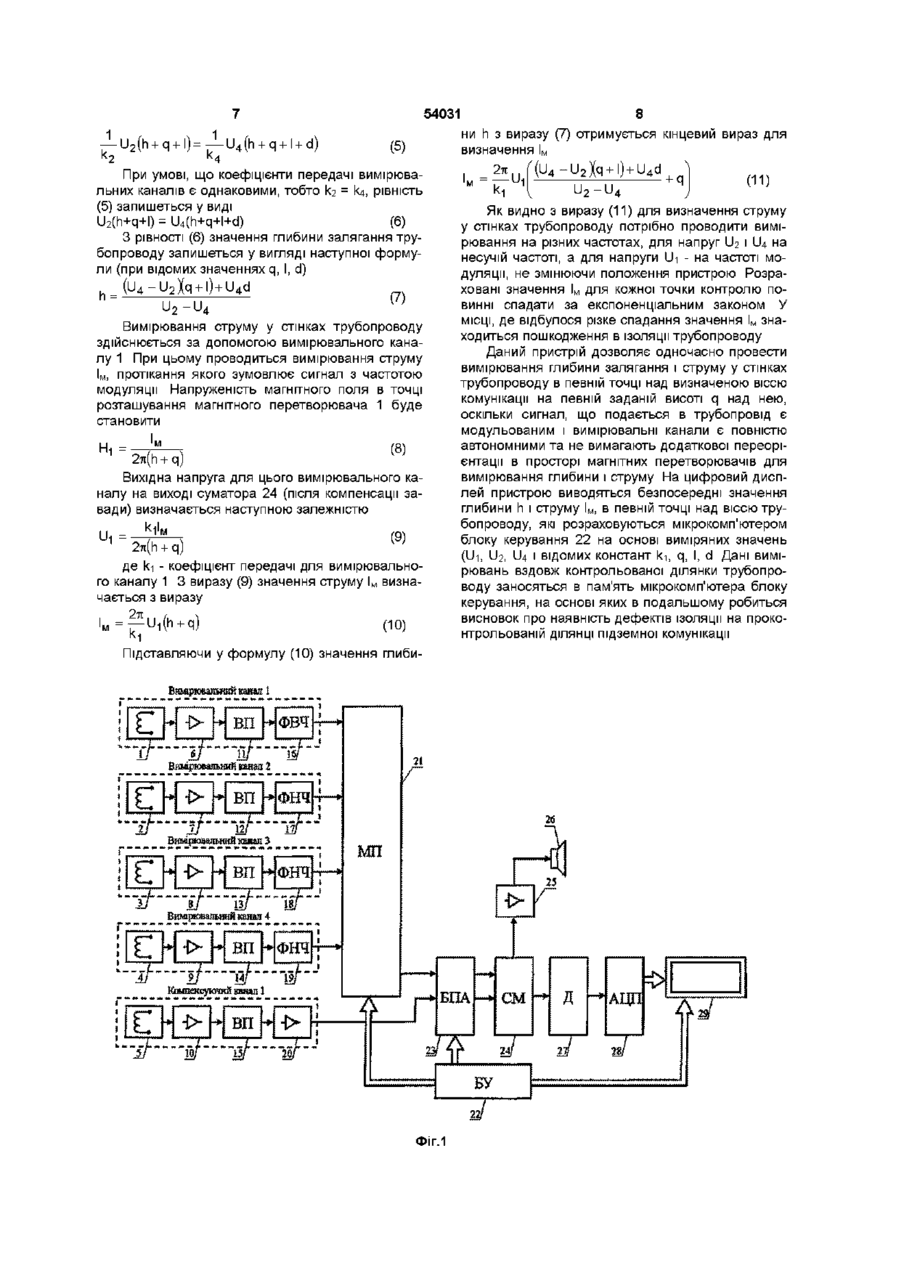
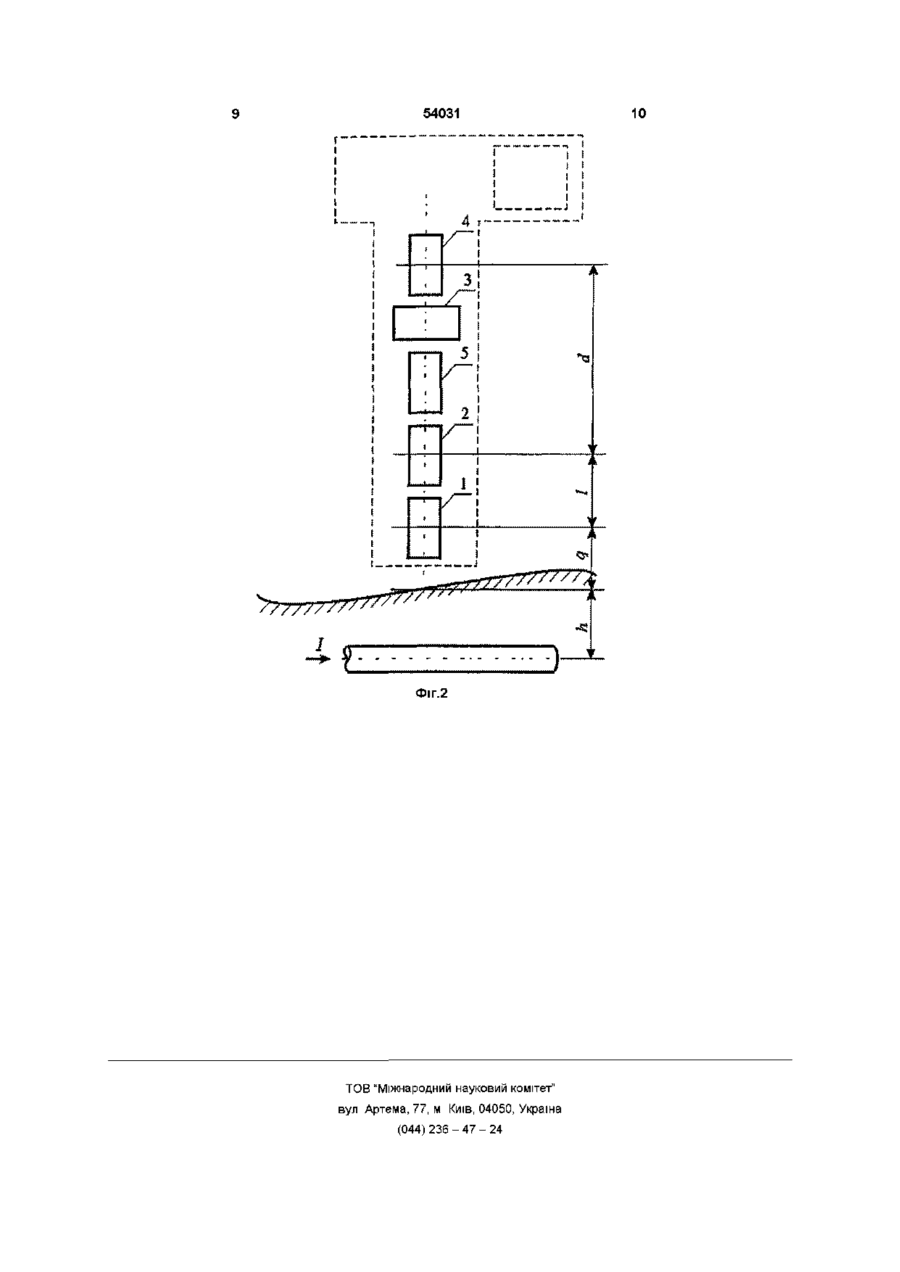
1 Пристрій дистанційного контролю стану ІЗОЛЯЦІЙНОГО покриття підземних трубопроводів, який складається з чотирьох перетворювачів магнітного поля, попередніх та вибіркових підсилювачів, аналого-цифрового перетворювача та дисплея, який відрізняється тим, що він додатково містить ще один перетворювач магнітного поля з попереднім та вибірковими підсилювачами і філь тром, мультиплексор, блок керування, блок приведення амплітуди, суматор, звуковий підсилювач, звуковий індикатор, детектор та цифровий індикатор 2 Пристрій за п 1 , який відрізняється тим, що перетворювачі магнітного поля розміщені вертикально один над одним 3 Пристрій за п 1 , який відрізняється тим, що п'ятий перетворювач магнітного поля разом з попереднім підсилювачем, вибірковим підсилювачем та інвертором утворюють компенсуючий завади канал 4 Пристрій за п 1 , який відрізняється тим, що суматор, звуковий підсилювач та звуковий індикатор утворюють паралельний контрольний канал Винахід відноситься до галузі технологічних вимірювань і призначений для неруйнівного контролю стану ІЗОЛЯЦІЙНОГО покриття підземних трубопроводів, визначення місця їхнього проходження та глибини залягання шляхом визначення сили струму у трубопроводі Відомий безконтактний вимірювач постійного струму у підземних трубопроводах (Безконтактний вимірювач постійного струму у підземних трубопроводах Патент України №22025, МКВ G 01 R 19/00, С 23 F 13/00/Джала Р М , СенюкО М ), який складається з першого і другого приймачів магнітного поля, індуктивної котушки, кутоміра, блока компенсації, першого та другого підсилювачів, блока збудження, індикатора осі, першого і другого синхронного детекторів, двох фільтрів низьких частот, блока віднімання, трьох блоків перемноження, блока ділення та вихідного індикатора Для роботи пристрою, як генератор, використовується станція катодного захисту Вимірювання струму у трубопроводі здійснюється сприймачами магнітного поля після виходу на його вісь впливає магнітне поле Землі, намагніченість самого трубопроводу, або металевих комунікацій, які розташовані поряд з ним Крім того, даний пристрій містить доволі громіздку і складну систему обробки результатів вимірювань Найближчим до винаходу за принципом дії є пристрій для безконтактного виявлення і обстеження прихованих струмопроводів (Пристрій для безконтактного виявлення і обстеження прихованих струмопроводів Патент України N25113, МКВ G 01 R 31/02 / Вакульський О А , Дуб П Б , Мізюк Л Я ) , який складається з чотирьох однакових перетворювачів магнітного поля, чотирьох резисторів навантаження, перемикача на два положення, двох попередніх та двох вибіркових підсилювачів, мультиплексора, керованого підсилювача, випростовувача, демультиплексора, блока запам'ятовуючих конденсаторів, аналого-цифрового перетворювача, мікрокомп'ютера та дисплея 3 метою компенсації промислових завад у цьому пристрої перетворювачі магнітного поля утворюють дві зміщені вздовж струмопроводу пари рознесених по висоті перетворювачів з паралельними осями чутливості Це дає змогу компенсувати заваду при Даний пристрій не забезпечує високої точності вимірювань, оскільки на результати вимірювань СО о Ю 54031 умові певного співвідношення амплітуд сигналів на перетворювачах Вимірювання струму у трубопроводі здійснюється магніточутливим перетворювачем після орієнтації вимірювальної частини пристрою на вісь трубопроводу Даний пристрій має низьке значення відношення сигнал/завада внаслідок використання у вимірювальних колах звичайних перемикачів, які до того ж вносять додатковий шум у корисний сигнал Наявність у первинних вимірювальних колах постійних резисторів суттєво знижує амплітуду корисного сигналу Крім того, вибраний метод компенсації завади є низько ефективним у випадку, коли джерелом завади є сам трубопровід, або сусідня з ним металева комунікація Блок запам'ятовуючих конденсаторів пристрою не дає змоги запам'ятовувати точне значення вимірювального сигналу при умові впливу на ємність конденсаторів зміни температури та напруги живлення До того ж пристрій має складну систему орієнтації перетворювачів магнітного поля В умовах експлуатації підземних трубопроводів такі фактори, як наявність потужних джерел завад, намагнічених металевих комунікацій, працюючих станцій катодного захисту створюють суттєвий негативний вплив на достовірність результатів вимірювань Це пояснюється тим, що конструкції існуючих пристроїв для безконтактного вимірювання струму у трубопроводі недають змоги повністю усунути вплив цих негативних факторів В основу винаходу покладено завдання створити такий пристрій, у якому нове конструктивне виконання первинних вимірювальних ланок, системи обробки інформації та застосування системи компенсації завади дозволили б вимірювати і запам'ятовувати точне значення змінного струму у трубопроводі, а за його зміною встановлювати місця пошкодження ізоляції трубопроводу, визначати місце його проходження під землею та глибину залягання, зменшити вплив завад на результати вимірювань Задача вирішується наступним чином У відомий пристрій додатково введено ще один перетворювач магнітного поля для компенсації сигналу завади Кожен з п'яти вимірювальних каналів містить попередній та вибірковий підсилювачі з фільтрами для чіткого виділення корисного сигналу З метою зменшення габаритів пристрою і підвищення зручності у користуванні усі вимірювальні перетворювачі у пристрої розміщені один над одним методом ешелонування Суматор пристрою, підсилювач та звуковий індикатор утворюють паралельний контрольний канал для слухового контролю вимірюваних сигналів Для цифрової обробки та запам'ятовування виміряних значень сигналу у пристрій введені мультиплексор, який під'єднаний до блоку керування, блок приведення амплітуди сигналу, аналого-цифровий перетворювач, індикатор, пристрої обробки та запам'ятовування інформації Структурна схема пристрою пояснюється кресленням, наведеним на фіг 1 Схематичне зображення просторового розміщення перетворювачів магнітного поля пристрою над трубопроводом наведено на фіг 2 Пристрій (фиг 1) складається з п'яти перетворювачів магнітного поля 1, 2, 3, 4, 5, п'яти попередніх підсилювачів 6, 7, 8, 9, 10, п'яти вибіркових підсилювачів 11, 12, 13, 14, 15, чотирьох фільтрів 16, 17, 18, 19, інвертора 20, мультиплексора 21, блоку керування 22, блоку приведення амплітуди 23, суматора 24, звукового пісилювача 25, звукового індикатора 26, детектора 27, аналогоцифрового перетворювача 28, цифрового індикатора 29 У ВІДПОВІДНОСТІ до фіг 2 усі перетворювачі магнітного поля мають вертикальне ешелонне розміщення в корпусі пристрою, тобто закріплені на одній осі Обмотки перетворювачів 1, 2, 4, 5 розміщені в одній площині, перпендикулярно до неї лежить площина в якій розміщена обмотка перетворювача 3 Перетворювачі магнітного поля 1, 2, 3, 4, разом з попередніми підсилювачами 6, 7, вибірковими підсилювачами 11, 12, 13, 14 і фільтрами 16, 17, 18, 19 утворюють чотири незалежних вимірювальних канали Перетворювач магнітного поля 5 разом попереднім підсилювачем 10, вибірковим підсилювачем 15 та інвертором 20 утворює компенсуючий канал Виходи вимірювальних каналів 1, 2, 3, 4 заводяться на вхід мультиплексора 21, вихід якого разом з виходом компесуючого каналу 1 з'єднані з блоком приведення амплітуди 23, виходи якого підключені до входів суматора 24 Виходи суматора ВІДПОВІДНО з'єднані з входом детектора 27 і з звуковим підсилювачем 25, вихід якого під'єднаний до звукового індикатора 26 Вихід детектора 27 під'єднаний до аналогоцифрового перетворювача 28, який у свою чергу, з'єднаний з блоком керування 22 Керуючі виходи блоку керування 22 з'єднані з керуючими входами мультиплексора 21 і блоку приведення амплітуди 23, а інформаційний вихід блоку керування з'єднаний з входом цифрового індикатора 29 Пристрій забезпечує знаходження місця пошкодження ізоляції підземного трубопроводу за допомогою вимірювання глибини його залягання та визначення струму в стінках трубопроводу і працює наступним чином До досліджуваного трубопроводу поєднується спеціальний генератор, сигнал з якого зумовлює протікання струму у стінках трубопроводу Струм І (фіг 2), що протікає в стінках трубопроводу представляє собою амплітудно - модульований сигнал Несуча частота сигналу з метою усунення впливу завад повинна бути не кратна промисловій частоті 50Гц Вона вибирається з діапазону 500 - 1000Гц і використовується для визначення ВІСІ траси трубопроводу та вимірювання глибини його залягання Частота сигналу модуляції вибирається з шфранизькочастотного діапазону (8 - 20Гц) З метою підвищеності завадозахищеності і уникнення впливу ЗОВНІШНІХ факторів, що не впливають на стан ІЗОЛЯЦІЙНОГО покриття, визначення сили струму в стінках трубопроводу проводиться для інфранизькочастотної складової сигналу Струм, що протікає по стінках трубопроводу збуджує електромагнітне поле, силові лінії якого є концентричними колами, що лежать в площині перпендикулярній до осі трубопроводу Магнітне поле, яке виникає навколо трубопроводу є багатокомпонентним і складається з магнітних полів несучого сигналу, сигналу модуляції і сигналу промислових 54031 завад з частотою 50Гц Перетворювачі магнітного поля 1, 2, 4, 5 розміщені так, що при встановленні осі пристрою перпендикулярно до осі трубопроводу (фіг 2) їх чутливість буде максимальною, а у перетворювача 3 - мінімальною Напруга на виході перетворювача, у цьому випадку, буде пропорційною напруженості магнітного поля, яку він сприймає Визначення наявності пошкодження ІЗОЛЯЦІЙНОГО покриття трубопроводу вимагає здійснення таких послідовних операцій визначення просторового розміщення осі трубопроводу, вимірювання глибини його залягання і струму, що протікає в стінках трубопроводу Кожен вимірювальний канал пристрою налаштовується на певну робочу частоту Вимірювальний канал 1 налаштований на частоту сигналу модуляції Сигнал з перетворювача магнітного поля 1, який представляє собою резонансний контур налаштований на робочу частоту, подається на попередній підсилювач 6, де підсилюється до необхідного рівня Після підсилювача 6 сигнал ще раз підсилюється вибірковим підсилювачем 11, де відбувається виділення сигналу тільки з робочою частотою, після цього сигнал надходить на активний фільтр високої частоти 16, в якому подавлюються складові сигналу, які лежать вище частоти зрізу (верхня межа робочого діапазону) Вимірювальні канали 2, 3, 4 використовуються для визначення осі трубопроводу і вимірювання глибини його залягання Робоча частота цих каналів відповідає несучій частоті сигналу, а принцип роботи аналогічний принципу роботи вимірювального каналу 1, тільки замість фільтра високої частоти 16 використовуються фільтри низької частоти 17, 18, 19, які подавлюють складові сигналу з частотами, що є нижчими за робочі Це зроблено для того, щоб виділити з сумарного сигналу сигнал з робочою частотою і максимально подавити заваду з промисловою частотою 50Гц Сигнал на виході вимірювального каналу представляє собою суму сигналів з частотами, що відповідають робочій, але в ньому при наявності потужного джерела завади може бути і гармоніка промислової частоти - 50Гц Для подавления сигналу завади досліджуваний сигнал після вимірювального каналу сумується в суматорі 24 з сигналом завади, що поступає у протифазі з компенсуючого каналу 1 Компесуючий канал 1 налаштований на частоту завади 50Гц Сигнал завади, сприйнятий перетворювачем 5 підсилюється підсилювачем 10 і виділяється вибірковим підсилювачем 15, з виходу якого подається на інвертор 20 Після інвертора 20 сигнал, що знаходиться у протифазі до прийнятого перетворювачем 5 подається на блок приведення амплітуди 23, який використовується для встановлення однакового рівня амплітуд сигналів, оскільки амплітуда сигналу завади у сумарному сигналі після кожного вимірювального каналу є різною Подача сигналу з кожного вимірювального каналу на суматор 24 здійснюється за допомогою мультиплексора 21 Режим роботи мультиплексора задає режим роботи усього пристрою У суматорі 24 відбувається сумування корисного сигналу з протифазним сигналом завади При цьому відбувається повне по давления завади у корисному сигналі 3 виходу суматора 24 сигнал подається на вхід детектора 27, де відбувається випростовування сигналу, який подається на вхід аналого-цифрового перетворювача 28 Перетворений у цифрову форму сигнал надходить на інформаційний вхід блоку керування 22, який представляє собою мікропроцесорну систему, що дає можливість вводити команди з клавіатури, яка входить у и склад Мікропроцесорна система за отриманими даними вимірювання проводить розрахунки і зберігає в пам'яті отримані результати Блок керування 22, керуючи роботою мультиплексора 21 і блоку приведення амплітуди задає режим роботи пристрою Візуальне відображення результатів вимірювання здійснюється на цифровому індикаторі 29 Крім візуального відображення інформації оператор здійснює оцінку інтенсивності сигналу за допомогою звукового індикатора 26, сигнал на який подається з виходу суматора 24 через звуковий підсилювач 25 Для визначення осі трубопроводу (траси) використовується перетворювач 3, вихідна напруга якого є мінімальною при виході на вісь трубопроводу, якщо розмістити корпус пристрою, як показано на фіг 2 Для визначення напрямку пролягання трубопроводу корпус пристрою повертається на 90°, по відношенню до попередньої позиції Вихід на напрям комунікації здійснюється по мінімуму сигналу на виході перетворювача 3, а орієнтація в просторі корпусу пристрою вказує на напрям пролягання трубопроводу Вихід на вісь траси здійснюється, за мінімальним рівнем сигналу на виході вимірювального каналу 3, значення, якого відображається на цифровому індикаторі 29 і по мінімальній інтенсивності випромінювання звукового індикатора 26 Вимірювання глибини залягання трубопроводу і величини струму в його стінках здійснюється наступним чином Для визначення глибини використовуються вимірювальні канали 2 і 4 Напруженість магнітного поля в точках розташування магнітних перетворювачів 2, 4 при розміщенні пристрою згідно фіг 2 для струму Ін, який створює в стінках трубопроводу сигнал несучої частоти знаходиться з виразу Н 2ті(п + q + і) (1) (2) 2я(п + q + І + d) де h, q, I, d - відстані, які вказані на фіг 2 Вихідна напруга для кожного з цих каналів на виході суматора 24 (після компенсації завади) визначається наступними залежностями 4 U 2 4 = ,гп 2я(п + q + і) ( ~ 2я(п + q + І + d) ' де кг і кд - коефіцієнти передачі ВІДПОВІДНО 2 і 4 вимірювальних каналів Оскільки для виразів (3) і (4) спільним множником є Ін то можна отримати наступну рівність 54031 U 2 (h + q + l ) = — U 4 ( h + q + l + d ! (5) k *2 4 При умові, що коефіцієнти передачі вимірювальних каналів є однаковими, тобто к2 = кд, рівність (5) запишеться у виді U2(h+q+l) = U4(h+q+l+d) (6) З рівності (6) значення глибини залягання трубопроводу запишеться у вигляді наступної формули (при відомих значеннях q, I, d) u и 2 -и 4 Вимірювання струму у стінках трубопроводу здійснюється за допомогою вимірювального каналу 1 При цьому проводиться вимірювання струму Ін, протікання якого зумовлює сигнал з частотою модуляції Напруженість магнітного поля в точці розташування магнітного перетворювача 1 буде становити Н (8) 27i(h + q) Вихідна напруга для цього вимірювального каналу на виході суматора 24 (після компенсації завади) визначається наступною залежністю ц = ^1'м , (9) 2я(п + q) де кі - коефіцієнт передачі для вимірювального каналу 1 3 виразу (9) значення струму Ім визначається з виразу І „ = — U ^ h + q) (10) К 1 Підставляючи у формулу (10) значення глиби 2 1 ВП ФНЧ 1 ГГГГГ_ ГГГІГ- „ „ І _ _L_J IT IT ш fir Фіг.1 ни h з виразу (7) отримується кінцевий вираз для визначення L (U 4 2я (11) q u2-u4 Як видно з виразу (11) для визначення струму у стінках трубопроводу потрібно проводити вимірювання на різних частотах, для напруг ІІ2 і ІЦ на несучій частоті, а для напруги Ui - на частоті модуляції, не змінюючи положення пристрою Розраховані значення І н для кожної точки контролю повинні спадати за експоненціальним законом У МІСЦІ, де відбулося різке спадання значення Ім знаходиться пошкодження в ізоляції трубопроводу Даний пристрій дозволяє одночасно провести вимірювання глибини залягання і струму у стінках трубопроводу в певній точці над визначеною віссю комунікації на певній заданій висоті q над нею, оскільки сигнал, що подається в трубопровід є модульованим і вимірювальні канали є повністю автономними та не вимагають додаткової переорієнтації в просторі магнітних перетворювачів для вимірювання глибини і струму На цифровий дисплей пристрою виводяться безпосередні значення глибини h і струму Ін, в певній точці над віссю трубопроводу, які розраховуються мікрокомп'ютером блоку керування 22 на основі виміряних значень (U-i, ІІ2, ІЦ і відомих констант k-i, q, I, d Дані вимірювань вздовж контрольованої ділянки трубопроводу заносяться в пам'ять мікрокомп'ютера блоку керування, на основі яких в подальшому робиться висновок про наявність дефектів ізоляції на проконтрольованій ДІЛЯНЦІ підземної комунікації 54031 Фіг.2 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)236-47-24 10
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for remotely monitoring insulation coating of an underground pipeline
Автори англійськоюKysil Ihor Stepanovych, Vaschyshak Serhii Petrovych, Yavorskyi Andrii Viktorovych
Назва патенту російськоюУстройство для дистанционного контроля состояния изоляционного покрытия подземного трубопровода
Автори російськоюКисиль Игорь Степанович, Ващишак Сергей Петрович, Яворский Андрей Викторович
МПК / Мітки
МПК: G01R 31/12
Мітки: пристрій, трубопроводів, дистанційного, покриття, контролю, підземних, стану, ізоляційного
Код посилання
<a href="https://ua.patents.su/5-54031-pristrijj-distancijjnogo-kontrolyu-stanu-izolyacijjnogo-pokrittya-pidzemnikh-truboprovodiv.html" target="_blank" rel="follow" title="База патентів України">Пристрій дистанційного контролю стану ізоляційного покриття підземних трубопроводів</a>
Система для контролю стану підземних трубопроводів
Номер патенту: 44566
Опубліковано: 15.02.2002
Автори: Аленков Юрій Анатолійович, Іванський Федір Дмитрович
МПК: F17D 5/00
Мітки: система, стану, підземних, трубопроводів, контролю
Формула / Реферат:
1. Система для контролю стану підземних трубопроводів, що включає датчик-сигналізатор, яка відрізняється тим, що вона має дренажний трубопровід з боковими отворами вздовж всієї його довжини, розміщеними паралельно і збоку від контрольованого трубопроводу таким чином, що дно дренажного трубопроводу знаходиться нижче дна контрольованого трубопроводу на 1/3-1/4 діаметра дренажного трубопроводу, навкруги дренажного трубопроводу улаштований...
Пристрій для контролю якості ізоляційного покриття труб
Номер патенту: 48253
Опубліковано: 15.08.2002
Автори: Скрипник Юрій Олексійович, Головко Дмитро Богданович, Локтіонов Михайло Георгійович
МПК: G01R 31/12
Мітки: якості, контролю, труб, покриття, ізоляційного, пристрій
Формула / Реферат:
Пристрій для контролю якості ізоляційного покриття труб, який містить джерело високої напруги, зондуючий електрод зі щіткою для забезпечення електричного контакту з торцем труби та контролюючий електрод зі щіткою для забезпечення контакту з поверхнею ізоляційного покриття труби, які з'єднані послідовно з джерелом високої напруги, датчик положення труби, пристрій відключення джерела високої напруги та блок індикації, який відрізняється тим, що...
Спосіб випробування трубопроводів і пристрій для контролю трубопроводів
Номер патенту: 44371
Опубліковано: 15.02.2002
Автори: Берд Джон Ферріс, Ремшо Джеймс Едвард
МПК: G01N 27/90
Мітки: випробування, спосіб, трубопроводів, пристрій, контролю
Формула / Реферат:
1. Пристрій для контролю трубопроводів, який переміщується по трубопроводу і включає в себе генераторний засіб для генерації поля вихрових струмів всередині трубопроводу і детекторний засіб для виявлення результуючого поля, який відрізняється тим, що пристрій контролю виконаний з можливістю визначення наявності дефектів в трубопроводах як з чорних, так і з кольорових металів, причому детекторний засіб містить перший і другий приймачі,...
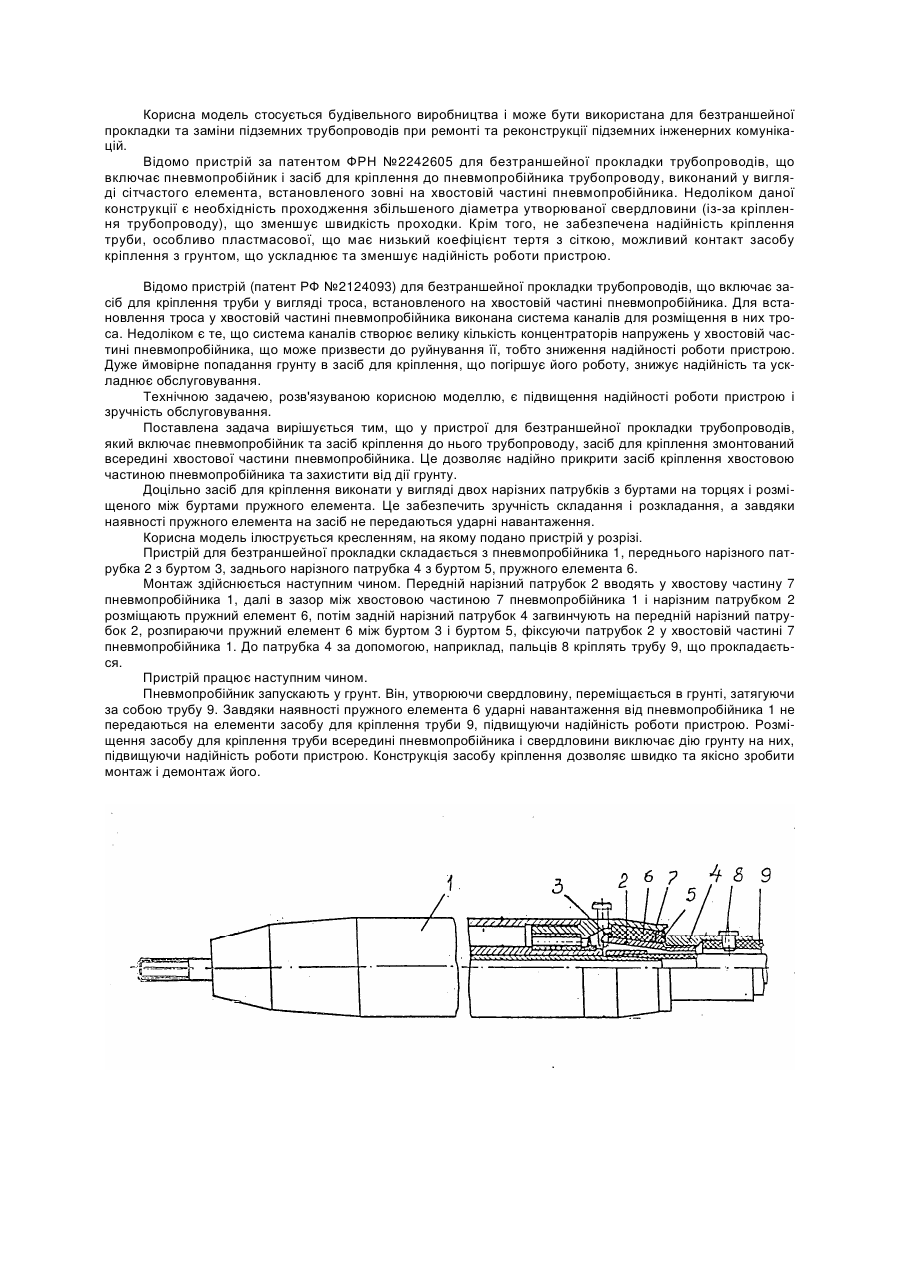
Пристрій для безтраншейної прокладки підземних трубопроводів
Номер патенту: 716
Опубліковано: 15.02.2001
Автори: Плавскіх Владімір Дмітрієвіч, Грігоращєнко Владімір Алєксандровіч, Соколов Павєл Алєксандровіч
МПК: E02F 5/16
Мітки: безтраншейної, пристрій, підземних, трубопроводів, прокладки
Формула / Реферат:
1. Пристрій для безтраншейної прокладки підземних трубопроводів, що включає пневмопробійник та засіб для кріплення до пневмопробійника трубопроводу, який відрізняється тим, що засіб для кріплення змонтований всередині хвостової частини пневмопробійника.2. Пристрій за п. 1, який відрізняється тим, що засіб для кріплення трубопроводу виконаний у вигляді двох нарізних патрубків з буртами на торцях і розміщеного між буртами пружного ...
Пристрій для дистанційного керування і контролю захисту
Номер патенту: 39283
Опубліковано: 15.08.2002
Автори: Мезніков Артур Володимирович, Стаднік Микола Іванович, Ведерніков Олександр Іванович
МПК: G08C 19/16
Мітки: дистанційного, контролю, захисту, пристрій, керування
Формула / Реферат:
Пристрій для дистанційного керування і контролю захисту, що містить в собі джерело змінного струму, двопровідну лінію зв'язку, селектор імпульсів, включений між згаданими джерелом і лінією зв'язку, який відрізняється тим, що в нього додатково введений і підключений між проводами лінії зв'язку принаймні один однополярний формувач імпульсів струму, до якого підключений елемент керування, включений між входом керування однополярного формувача...
Попередній патент: Спосіб поверхневого загартування сталей з низькою прогартовуваністю
Наступний патент: Торпеда для дилатансійної обробки нафто-газових колекторів середньої потужності
Випадковий патент: Спосіб мінімізації похибки вимірювання електроенергії в мережах з повторно-короткочасним навантаженням