Кінематична схема веломобіля з ручним приводом і керуванням

Формула / Реферат
1. Кінематична схема веломобіля з ручним приводом і керуванням, що містить підсистему керування у складі керма, тягової системи, підсистему приводу в складі керма, хиткого важеля, який закріплений на осі, жорстко з'єднаній з рамою, вузла захоплення важелем тягового ланцюга, ланцюга, розтягнутого на двох зубчатках, коліс приводу з тріскачкою, яка відрізняється тим, що підсистема керування містить кермо 1, з'єднане з верхнім кожухом 2 хиткої рульової колонки (ХРК), який, у свою чергу, коаксіально позиціонований і з'єднаний з верхньою піввіссю 3 ХРК за допомогою верхнього 4 і нижнього 5 підшипникових вузлів, тобто верхня піввісь 3 ХРК і верхній кожух 2 ХРК являють собою обертальну пару з однією нерухомою ланкою, кінець важеля 22, зв'язаного з верхнім кожухом 2 ХРК, являє собою елемент сферичної пари 23, комплементарний елемент якої розташований на кінці тяги 24, сферична пара 23 розташована точно на осьовій лінії осі 12 вузла хитання 11, при нейтральному положенні керма 1, коли осьова лінія керма 1 перпендикулярна до осьової лінії рами 13, тяга 24 пов'язана з поворотником 25 за допомогою сферичної пари 26, поворотник 25 встановлений з можливістю обертання на осі 27 і з'єднаний з нею за допомогою підшипникового вузла 42, вісь 27 закріплена на поперечині 28, поворотник 25 через тягу 29, що має на кінцях сферичні пари 30 і 31, з'єднаний з коромислом 32 вилки лівого колеса 33, коромисло 32 вилки лівого колеса 33 з'єднано з коромислом 34 вилки правого колеса 38 за допомогою тяги 35, яка має на кінцях сферичні пари 36 і 37, а підсистема приводу веломобіля містить кермо 1, з'єднане з верхнім кожухом 2 ХРК, який з'єднаний з верхньою піввіссю 3 ХРК за допомогою верхнього 4 і нижнього 5 підшипникових вузлів, нижню піввісь 6 ХРК і нижній кожух 7 ХРК, які коаксіально позиціоновані і пов'язані між собою за допомогою верхнього 8 і нижнього 9 підшипникових вузлів ковзання, тобто являють собою поступальну пару з однією нерухомою ланкою, причому на нижньому кожусі 7 є стопор 10, який дозволяє фіксувати положення нижнього кожуха 7 відносно нижньої півосі 6, ХРК за допомогою вузла хитання 11 пов'язана з рамою веломобіля 13, при цьому осьова лінія осі 12 вузла хитання 11 розташована перпендикулярно до осьової лінії рами 13, нижній кожух 7 ХРК з'єднаний з ланцюгом 15 за допомогою важеля 14, ланцюг 15 розтягнуто на веденій зубчатці заднього колеса 16 і фальшзубчатці 17, встановленій на хиткому коромислі 18 за допомогою підшипникових вузлів 19, віссю обертання хиткого коромисла 18 є вісь обертання заднього колеса 20, з якою хитке коромисло 18 з'єднане за допомогою підшипникових вузлів кочення 21, тобто хитке коромисло 18 і вісь обертання заднього колеса 20 являють собою обертальну пару з однією нерухомою ланкою, заднє колесо застосовано з безтормозною втулкою і з тріскачкою.
2. Кінематична схема за п. 1, яка відрізняється тим, що містить підсистему плавної зміни передач, що включає нижню піввісь 6 ХРК і нижній кожух 7 ХРК, які коаксіально позиціоновані і пов'язані між собою за допомогою верхнього 8 і нижнього 9 підшипникових вузлів ковзання, тобто являють собою поступальну пару з однією нерухомою ланкою, на нижньому кожусі 7 ХРК виконаний стопор 10, який дозволяє фіксувати положення нижнього кожуха 7 ХРК відносно нижньої півосі 6 ХРК.
Текст
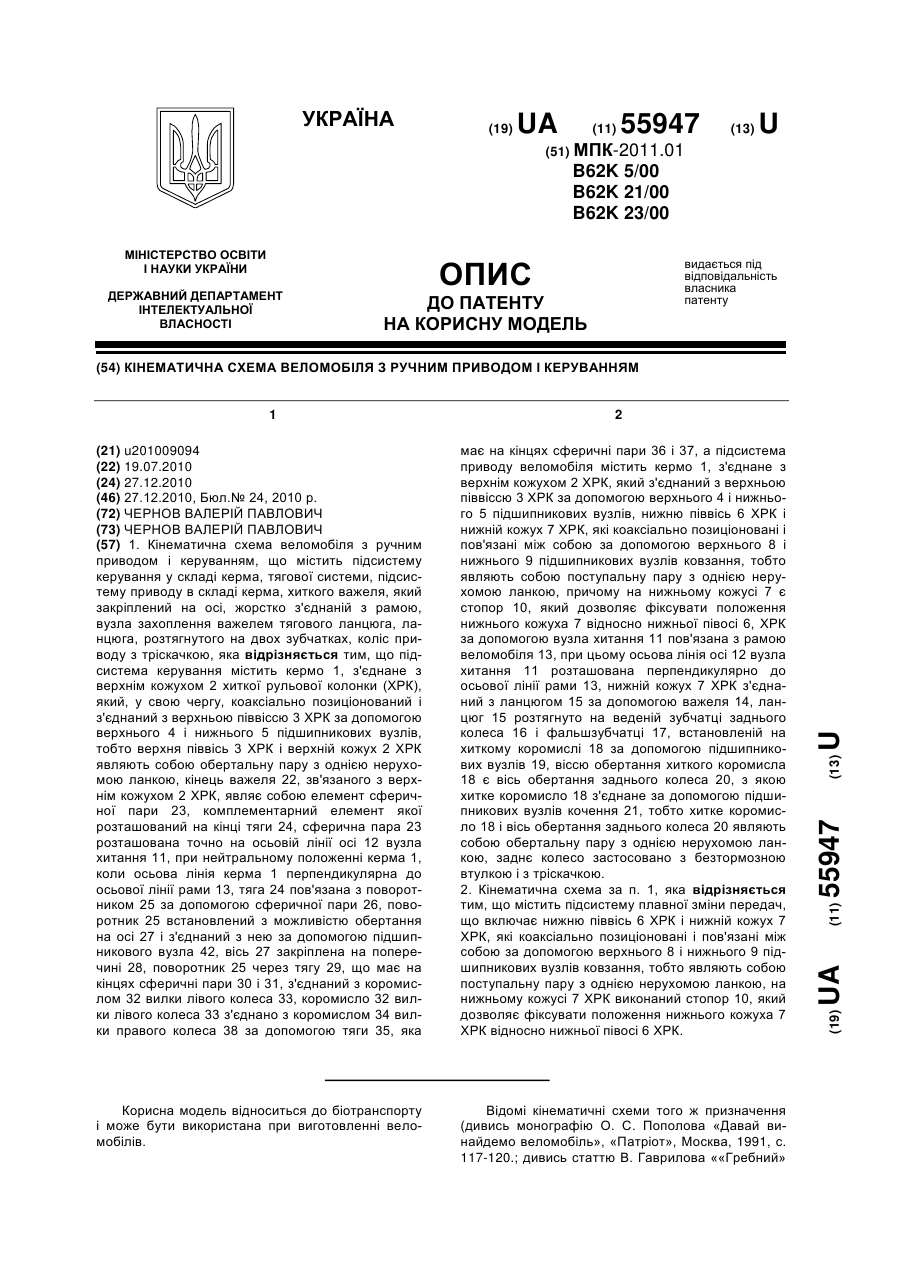
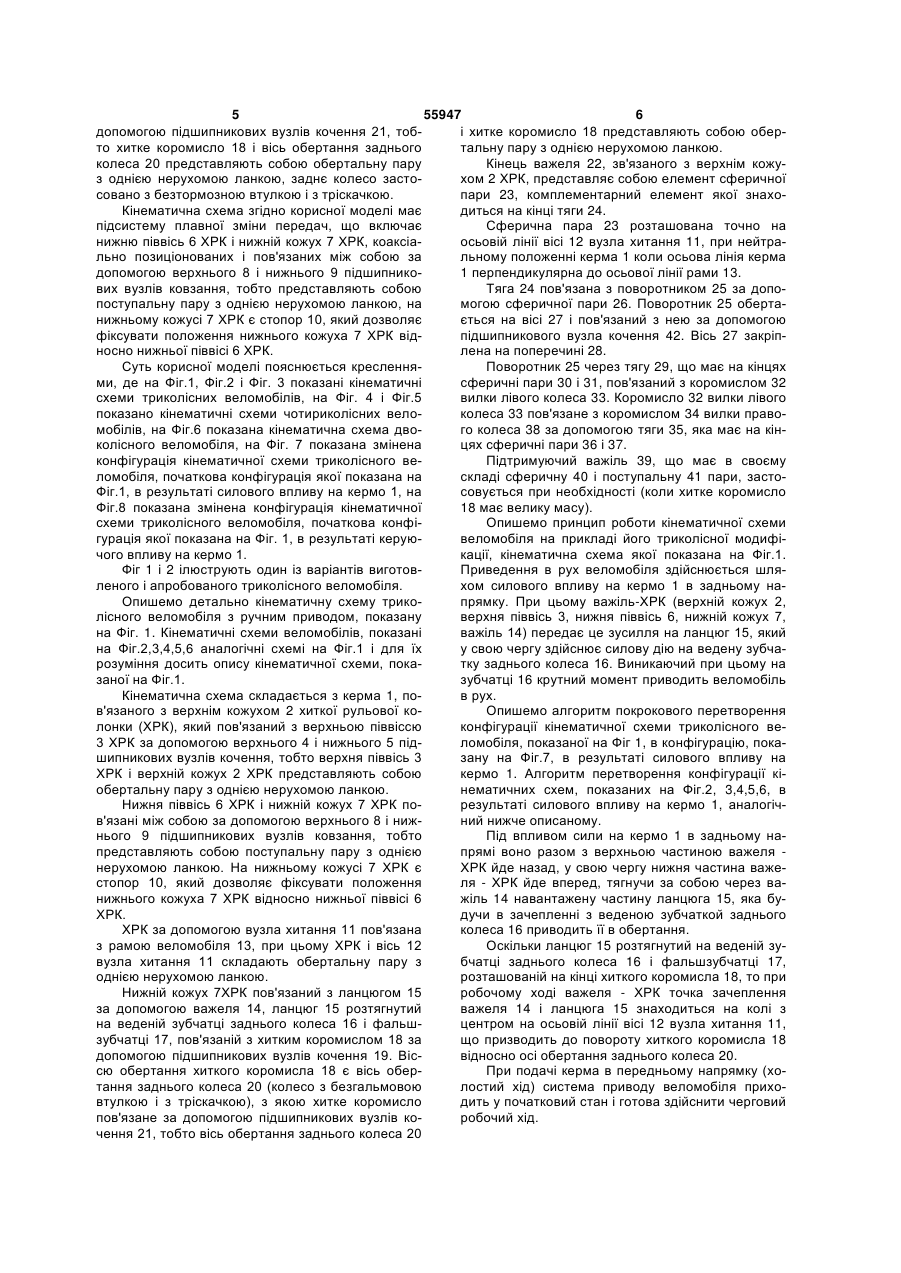
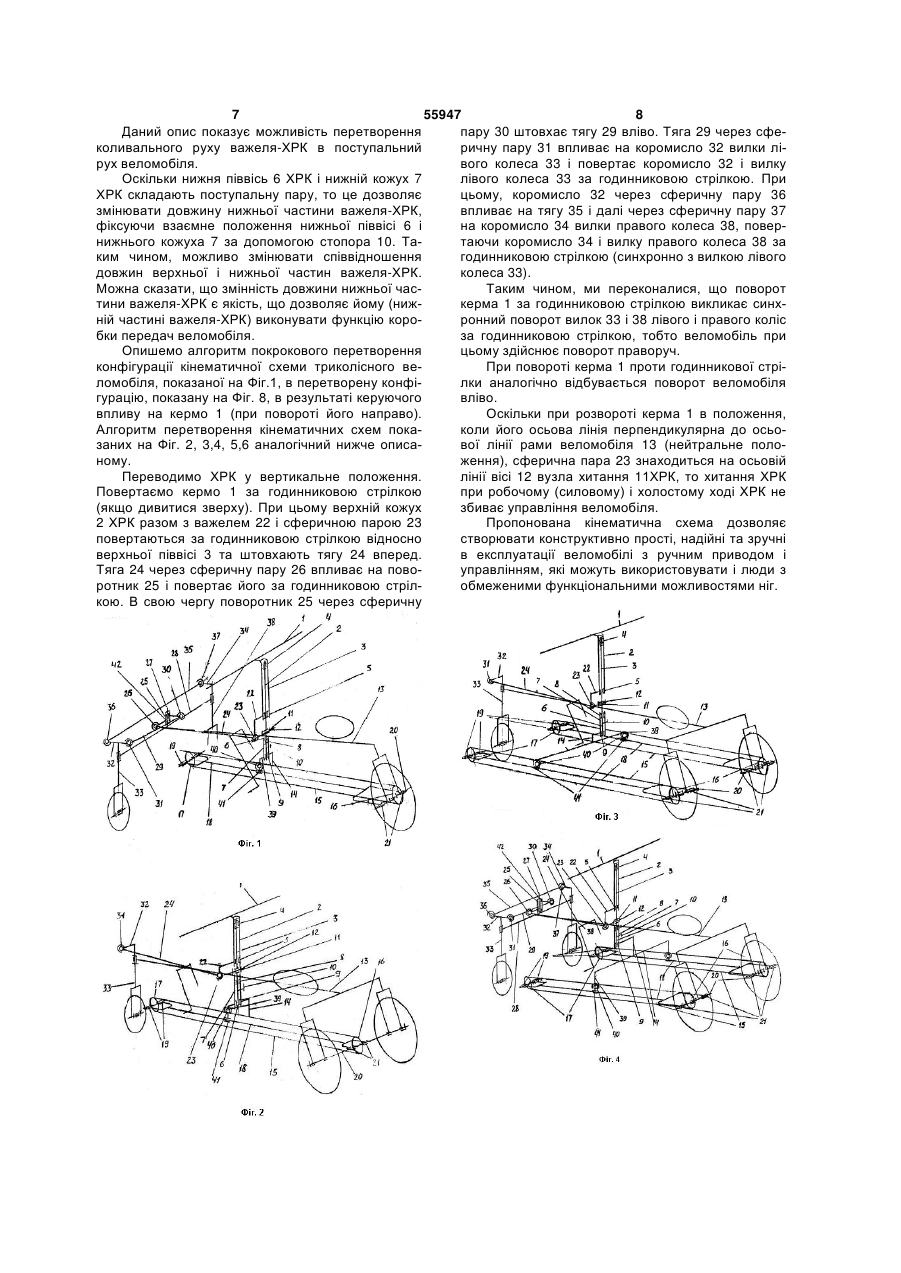
1. Кінематична схема веломобіля з ручним приводом і керуванням, що містить підсистему керування у складі керма, тягової системи, підсистему приводу в складі керма, хиткого важеля, який закріплений на осі, жорстко з'єднаній з рамою, вузла захоплення важелем тягового ланцюга, ланцюга, розтягнутого на двох зубчатках, коліс приводу з тріскачкою, яка відрізняється тим, що підсистема керування містить кермо 1, з'єднане з верхнім кожухом 2 хиткої рульової колонки (ХРК), який, у свою чергу, коаксіально позиціонований і з'єднаний з верхньою піввіссю 3 ХРК за допомогою верхнього 4 і нижнього 5 підшипникових вузлів, тобто верхня піввісь 3 ХРК і верхній кожух 2 ХРК являють собою обертальну пару з однією нерухомою ланкою, кінець важеля 22, зв'язаного з верхнім кожухом 2 ХРК, являє собою елемент сферичної пари 23, комплементарний елемент якої розташований на кінці тяги 24, сферична пара 23 розташована точно на осьовій лінії осі 12 вузла хитання 11, при нейтральному положенні керма 1, коли осьова лінія керма 1 перпендикулярна до осьової лінії рами 13, тяга 24 пов'язана з поворотником 25 за допомогою сферичної пари 26, поворотник 25 встановлений з можливістю обертання на осі 27 і з'єднаний з нею за допомогою підшипникового вузла 42, вісь 27 закріплена на поперечині 28, поворотник 25 через тягу 29, що має на кінцях сферичні пари 30 і 31, з'єднаний з коромислом 32 вилки лівого колеса 33, коромисло 32 вилки лівого колеса 33 з'єднано з коромислом 34 вилки правого колеса 38 за допомогою тяги 35, яка U 2 (19) 1 3 55947 4 привід веломобіля», у журналі «Моделістсинхронні повороти вилок 33, 38 лівого і правого конструктор »№ 4 за 2006, с.5). коліс. Всі вище відмічені кінематичні схеми працюПо-третє, нижня піввісь 6 ХРК і нижній кожух 7 ють на веломобілях з подвійним приводом (ножХРК коаксіально позиціоновані і зв'язані між собою ним і ручним). Ця універсальність не дозволяє за допомогою верхнього 8 і нижнього 9 підшипнивиявити всі сильні сторони ручного приводу так як кових вузлів ковзання, що дозволяє змінювати він на всіх цих схемах підлаштовується під схему з довжину нижньої частини ХРК (фіксуючи положенножним приводом. ня нижнього кожуха 7 ХРК відносно нижньої піввісі За найближчий аналог прийнята кінематична 6 ХРК за допомогою стопора 10). Змінність довжисхема веломобіля з додатковим ручним «гребним» ни нижньої частини ХРК дозволяє їй виконувати приводом В. Гаврилова (дивись журнал «Модефункцію коробки передач веломобіля. лист-конструктор» № 4 за 2006 рік, с 5). Вона пеКінематична схема веломобіля з ручним приредбачає наявність великої ведучої зірочки ручноводом і управлінням, що включає підсистему го приводу, закріпленої на валу додаткового кареуправління у складі керма, тягової системи, підситочного вузла так, щоб у роботі знаходилося не стему приводу в складі керма, хиткого важеля, менше десяти її зубів і ланок ланцюга. З ведучою який кріпиться на вісі жорстко пов'язаної з рамою, зірочкою через «ручні» шатуни пов'язаний ручний вузла захоплення важелем тягового ланцюга, лаважіль, в поперечній трубці якого просвердлений нцюга розтягнутого на двох зубчатках, коліс пригоризонтальний наскрізний отвір, в який вварений воду з тріскачкою, яка характеризується тим, що палець з встановленим на ньому підшипником в підсистема управління включає кермо 1, пов'язане сталевій обоймі. До останньої приварене кермо з верхнім кожухом 2 хиткої рульової колонки (ХРК), так, щоб його рукоятки були розташовані найбільш який у свою чергу коаксіально позиціонований і зручно для захоплення руками. Отриманим «штупов'язаний з верхньою піввіссю З ХРК за допоморвалом» можна здійснювати коливання впередгою верхнього 4 і нижнього 5 підшипникових вузназад, здійснюючи додатковий привід. На коронці лів, тобто верхня піввісь З ХРК і верхній кожух 2 передньої вилки веломобіля закріплений двоплічХРК являють собою обертальну пару з однією нений поворотний важіль. До важеля з обох кінців рухомою ланкою, кінець важеля 22, зв'язаного з приєднані два жорсткі але гнучкі металеві троси, верхнім кожухом 2 ШРК, представляє собою елеперекинуті через додаткову каретку перехресно мент сферичної пари 23, комплементарний еле(щоб обертання керма за годинниковою стрілкою мент якої знаходиться на кінці тяги 24, сферична відповідало повороту праворуч). Інші кінці тросів пара 23 розташована точно на осьовій лінії вісі 12 закріплені на кінцях керма. Зміна напрямку руху вузла хитання 11, при нейтральному положенні забезпечується поворотом керма навколо пальця керма 1, коли осьова лінія керма 1 перпендикуляза рахунокгнучких тросів, огинаючих каретку. рна до осьової лінії рами 13, тяга 24 пов'язана з Троси передають «команду» на двоплічних важіль. поворотником 25 за допомогою сферичної пари 26, поворотник 25 встановлений з можливістю Недоліком вище описаної схеми є те, що хиобертання на вісі 27 і пов'язаний з нею за допомотання ручного важеля забезпечують малу амплігою підшипникового вузла 42, вісь 27 закріплена туду переміщень ланцюга, а це не дозволяє в одна поперечині 28, поворотних 25 через тягу 29, що ному циклі хитання передати на ведену зубчатку має на кінцях сферичні пари 30 і 31, пов'язаний з приводу значну порцію енергії, при цьому тросова коромислом 32 вилки лівого колеса 33, коромисло система управління рухом не забезпечує її якісну 32 вилки лівого колеса 33 пов'язане з коромислом роботу. 34 вилки правого колеса 38 за допомогою тяги 35, В основу корисної моделі поставлено задачу яка має на кінцях сферичні пари 36 і 37, а підсисстворення кінематичної схеми веломобіля, яка тема приводу веломобіля включає кермо 1, пов'ядозволяє приводити його в дію і керувати вручну зане з верхнім кожухом 2 ХРК, який пов'язаний з за допомогою керма 1. верхньою піввіссю З ХРК за допомогою верхнього Рішення поставленої задачі досягається вве4 і нижнього 5 підшипникових вузлів, нижню піввісь денням в кінематичну схему веломобіля хиткої 6 ХРК і нижній кожух 7 ХРК, які коаксіально позицірульової колонки (ХРК), яка, по-перше, своїм жороновані і пов'язані між собою за допомогою верхстким остовом (верхня піввісь 3, нижня піввісь 6, нього 8 і нижнього 9 підшипникових вузлів ковзаннижній кожух 7, важіль 14) працює (за сприянням ня, тобто представляють собою поступальну пару хиткого коромисла 18) як важіль і перетворює зуз однією нерухомою ланкою, причому, на нижньосилля на кермо 1 в тягу ланцюга 15 на ведену зубму кожусі 7 є стопор 10, який дозволяє фіксувати чатку заднього колеса 16. положення нижнього кожуха 7 відносно нижньої По-друге, конструкція верхньої частини ХРК, а піввісі 6, ХРК за допомогою вузла хитання 11 посаме наявність верхнього кожуха 2, коаксіально в'язана з рамою веломобіля 13, при цьому осьова позиціонованого по відношенню до верхньої піввісі лінія вісі 12 вузла хитання 11 розташована перпе3 (частини жорсткого остову ХРК), пов'язаного з ндикулярно до осьової лінії рами 13, нижній кожух нею за допомогою верхнього 4 і нижнього 5 підши7 ХРК пов'язаний з ланцюгом 15 за допомогою пникових вузлів кочення, що має можливість вільважеля 14, ланцюг 15 розтягнуто на веденої зубно обертатися навколо цієї піввісі 3, дозволяє початці заднього колеса 16 і фальшзубчатці 17, вороти керма 1, верхнього кожуха 2 і важеля 14 встановленої на хиткому коромислі 18 за допомочерез систему тяг 24,29,35, сферичних пар 23, 26, гою підшипникових вузлів 19, віссю обертання хит30, 31, 36, 37 і поворотник 25 перетворювати на кого коромисла 18 є вісь обертання заднього колеса 20, з якою хитке коромисло 18 пов'язане за 5 55947 6 допомогою підшипникових вузлів кочення 21, тобі хитке коромисло 18 представляють собою оберто хитке коромисло 18 і вісь обертання заднього тальну пару з однією нерухомою ланкою. колеса 20 представляють собою обертальну пару Кінець важеля 22, зв'язаного з верхнім кожуз однією нерухомою ланкою, заднє колесо застохом 2 ХРК, представляє собою елемент сферичної совано з безтормозною втулкою і з тріскачкою. пари 23, комплементарний елемент якої знахоКінематична схема згідно корисної моделі має диться на кінці тяги 24. підсистему плавної зміни передач, що включає Сферична пара 23 розташована точно на нижню піввісь 6 ХРК і нижній кожух 7 ХРК, коаксіаосьовій лінії вісі 12 вузла хитання 11, при нейтрально позиціонованих і пов'язаних між собою за льному положенні керма 1 коли осьова лінія керма допомогою верхнього 8 і нижнього 9 підшипнико1 перпендикулярна до осьової лінії рами 13. вих вузлів ковзання, тобто представляють собою Тяга 24 пов'язана з поворотником 25 за допопоступальну пару з однією нерухомою ланкою, на могою сферичної пари 26. Поворотник 25 обертанижньому кожусі 7 ХРК є стопор 10, який дозволяє ється на вісі 27 і пов'язаний з нею за допомогою фіксувати положення нижнього кожуха 7 ХРК відпідшипникового вузла кочення 42. Вісь 27 закріпносно нижньої піввісі 6 ХРК. лена на поперечині 28. Суть корисної моделі пояснюється кресленняПоворотник 25 через тягу 29, що має на кінцях ми, де на Фіг.1, Фіг.2 і Фіг. 3 показані кінематичні сферичні пари 30 і 31, пов'язаний з коромислом 32 схеми триколісних веломобілів, на Фіг. 4 і Фіг.5 вилки лівого колеса 33. Коромисло 32 вилки лівого показано кінематичні схеми чотириколісних велоколеса 33 пов'язане з коромислом 34 вилки правомобілів, на Фіг.6 показана кінематична схема двого колеса 38 за допомогою тяги 35, яка має на кінколісного веломобіля, на Фіг. 7 показана змінена цях сферичні пари 36 і 37. конфігурація кінематичної схеми триколісного веПідтримуючий важіль 39, що має в своєму ломобіля, початкова конфігурація якої показана на складі сферичну 40 і поступальну 41 пари, застоФіг.1, в результаті силового впливу на кермо 1, на совується при необхідності (коли хитке коромисло Фіг.8 показана змінена конфігурація кінематичної 18 має велику масу). схеми триколісного веломобіля, початкова конфіОпишемо принцип роботи кінематичної схеми гурація якої показана на Фіг. 1, в результаті керуювеломобіля на прикладі його триколісної модифічого впливу на кермо 1. кації, кінематична схема якої показана на Фіг.1. Фіг 1 і 2 ілюструють один із варіантів виготовПриведення в рух веломобіля здійснюється шляленого і апробованого триколісного веломобіля. хом силового впливу на кермо 1 в задньому наОпишемо детально кінематичну схему трикопрямку. При цьому важіль-ХРК (верхній кожух 2, лісного веломобіля з ручним приводом, показану верхня піввісь 3, нижня піввісь 6, нижній кожух 7, на Фіг. 1. Кінематичні схеми веломобілів, показані важіль 14) передає це зусилля на ланцюг 15, який на Фіг.2,3,4,5,6 аналогічні схемі на Фіг.1 і для їх у свою чергу здійснює силову дію на ведену зубчарозуміння досить опису кінематичної схеми, покатку заднього колеса 16. Виникаючий при цьому на заної на Фіг.1. зубчатці 16 крутний момент приводить веломобіль Кінематична схема складається з керма 1, пов рух. в'язаного з верхнім кожухом 2 хиткої рульової коОпишемо алгоритм покрокового перетворення лонки (ХРК), який пов'язаний з верхньою піввіссю конфігурації кінематичної схеми триколісного ве3 ХРК за допомогою верхнього 4 і нижнього 5 підломобіля, показаної на Фіг 1, в конфігурацію, покашипникових вузлів кочення, тобто верхня піввісь 3 зану на Фіг.7, в результаті силового впливу на ХРК і верхній кожух 2 ХРК представляють собою кермо 1. Алгоритм перетворення конфігурації кіобертальну пару з однією нерухомою ланкою. нематичних схем, показаних на Фіг.2, 3,4,5,6, в Нижня піввісь 6 ХРК і нижній кожух 7 ХРК порезультаті силового впливу на кермо 1, аналогічв'язані між собою за допомогою верхнього 8 і нижний нижче описаному. нього 9 підшипникових вузлів ковзання, тобто Під впливом сили на кермо 1 в задньому напредставляють собою поступальну пару з однією прямі воно разом з верхньою частиною важеля нерухомою ланкою. На нижньому кожусі 7 ХРК є ХРК йде назад, у свою чергу нижня частина важестопор 10, який дозволяє фіксувати положення ля - ХРК йде вперед, тягнучи за собою через ванижнього кожуха 7 ХРК відносно нижньої піввісі 6 жіль 14 навантажену частину ланцюга 15, яка буХРК. дучи в зачепленні з веденою зубчаткой заднього ХРК за допомогою вузла хитання 11 пов'язана колеса 16 приводить її в обертання. з рамою веломобіля 13, при цьому ХРК і вісь 12 Оскільки ланцюг 15 розтягнутий на веденій зувузла хитання 11 складають обертальну пару з бчатці заднього колеса 16 і фальшзубчатці 17, однією нерухомою ланкою. розташованій на кінці хиткого коромисла 18, то при Нижній кожух 7ХРК пов'язаний з ланцюгом 15 робочому ході важеля - ХРК точка зачеплення за допомогою важеля 14, ланцюг 15 розтягнутий важеля 14 і ланцюга 15 знаходиться на колі з на веденій зубчатці заднього колеса 16 і фальшцентром на осьовій лінії вісі 12 вузла хитання 11, зубчатці 17, пов'язаній з хитким коромислом 18 за що призводить до повороту хиткого коромисла 18 допомогою підшипникових вузлів кочення 19. Вісвідносно осі обертання заднього колеса 20. сю обертання хиткого коромисла 18 є вісь оберПри подачі керма в передньому напрямку (хотання заднього колеса 20 (колесо з безгальмовою лостий хід) система приводу веломобіля приховтулкою і з тріскачкою), з якою хитке коромисло дить у початковий стан і готова здійснити черговий пов'язане за допомогою підшипникових вузлів коробочий хід. чення 21, тобто вісь обертання заднього колеса 20 7 55947 8 Даний опис показує можливість перетворення пару 30 штовхає тягу 29 вліво. Тяга 29 через сфеколивального руху важеля-ХРК в поступальний ричну пару 31 впливає на коромисло 32 вилки лірух веломобіля. вого колеса 33 і повертає коромисло 32 і вилку Оскільки нижня піввісь 6 ХРК і нижній кожух 7 лівого колеса 33 за годинниковою стрілкою. При ХРК складають поступальну пару, то це дозволяє цьому, коромисло 32 через сферичну пару 36 змінювати довжину нижньої частини важеля-ХРК, впливає на тягу 35 і далі через сферичну пару 37 фіксуючи взаємне положення нижньої піввісі 6 і на коромисло 34 вилки правого колеса 38, повернижнього кожуха 7 за допомогою стопора 10. Татаючи коромисло 34 і вилку правого колеса 38 за ким чином, можливо змінювати співвідношення годинниковою стрілкою (синхронно з вилкою лівого довжин верхньої і нижньої частин важеля-ХРК. колеса 33). Можна сказати, що змінність довжини нижньої часТаким чином, ми переконалися, що поворот тини важеля-ХРК є якість, що дозволяє йому (нижкерма 1 за годинниковою стрілкою викликає синхній частині важеля-ХРК) виконувати функцію короронний поворот вилок 33 і 38 лівого і правого коліс бки передач веломобіля. за годинниковою стрілкою, тобто веломобіль при Опишемо алгоритм покрокового перетворення цьому здійснює поворот праворуч. конфігурації кінематичної схеми триколісного веПри повороті керма 1 проти годинникової стріломобіля, показаної на Фіг.1, в перетворену конфілки аналогічно відбувається поворот веломобіля гурацію, показану на Фіг. 8, в результаті керуючого вліво. впливу на кермо 1 (при повороті його направо). Оскільки при розвороті керма 1 в положення, Алгоритм перетворення кінематичних схем покаколи його осьова лінія перпендикулярна до осьозаних на Фіг. 2, 3,4, 5,6 аналогічний нижче описавої лінії рами веломобіля 13 (нейтральне полоному. ження), сферична пара 23 знаходиться на осьовій Переводимо ХРК у вертикальне положення. лінії вісі 12 вузла хитання 11ХРК, то хитання ХРК Повертаємо кермо 1 за годинниковою стрілкою при робочому (силовому) і холостому ході ХРК не (якщо дивитися зверху). При цьому верхній кожух збиває управління веломобіля. 2 ХРК разом з важелем 22 і сферичною парою 23 Пропонована кінематична схема дозволяє повертаються за годинниковою стрілкою відносно створювати конструктивно прості, надійні та зручні верхньої піввісі 3 та штовхають тягу 24 вперед. в експлуатації веломобілі з ручним приводом і Тяга 24 через сферичну пару 26 впливає на повоуправлінням, які можуть використовувати і люди з ротник 25 і повертає його за годинниковою стрілобмеженими функціональними можливостями ніг. кою. В свою чергу поворотник 25 через сферичну 9 Комп’ютерна верстка Д. Шеверун 55947 Підписне 10 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюKinematic scheme of cycle mobilewith a manual driveand steering
Автори англійськоюChernov Valerii Pavlovych
Назва патенту російськоюКинематическая схема веломобиля с ручным приводом и управлением
Автори російськоюЧернов Валерий Павлович
МПК / Мітки
МПК: B62K 5/00, B62K 23/00, B62K 21/00
Мітки: приводом, кінематична, ручним, схема, керуванням, веломобіля
Код посилання
<a href="https://ua.patents.su/5-55947-kinematichna-skhema-velomobilya-z-ruchnim-privodom-i-keruvannyam.html" target="_blank" rel="follow" title="База патентів України">Кінематична схема веломобіля з ручним приводом і керуванням</a>
Рушій транспортних засобів з ручним приводом
Номер патенту: 85814
Опубліковано: 10.03.2009
Автори: Шульга Анна Григорівна, Христич Кирило Олегович
МПК: B62M 1/00
Мітки: ручним, приводом, транспортних, рушій, засобів
Формула / Реферат:
1. Рушій транспортних засобів з ручним приводом для ручного самопересування в сидячій позі по рівній поверхні, до складу якого входять два одноплечих важелі, закріплених у вертикальній площині шарнірно через вісь по обидва боки транспортного засобу в зоні розміщення кистей рук, нижні кінці яких зв'язані через опору обертання зповерхнею пересування, а верхні оснащені ручками, зручними для захвату кистями руки, який відрізняється тим, що обидва...
Мотоцикл з переднім приводом і гідравлічним керуванням заднього колеса
Номер патенту: 16541
Опубліковано: 15.08.2006
Автор: Симовоник Ярослав Васильович
МПК: B62K 11/00, B62D 3/00
Мітки: мотоцикл, приводом, заднього, колеса, керуванням, переднім, гідравлічним
Формула / Реферат:
1. Мотоцикл з переднім приводом і гідравлічним керуванням заднього колеса, що має пустотілу раму з амортизаторами, передній привід з ланцюговою передачею, розміщеною на балці, вилку з рульовим керуванням і руль, який відрізняється тим, що додатково обладнаний системою гідропроводів, прокладених в пустотілій рамі, нагнітаючими поршнями, поршнями з штовхачами, Н-подібним балансиром-регулятором і коромислами, а як вилку з рульовим керуванням у...
Таль з ручним приводом
Номер патенту: 6958
Опубліковано: 31.03.1995
Автори: Шейнін Віталій Рувімович, Риков Костянтин Михайлович
МПК: B66D 3/00
Формула / Реферат:
1. Таль с ручным приводом, включающая снабженный средствами подвески корпус с установленным в нем приводным валом, барабан с гибким тяговым органом, установленный на указанном валу, и фрикционный тормоз, отличающаяся тем, что фрикционный тормоз выполнен в виде установленного на валуе возможностью осевого перемещения по крайней мере одного подпружиненного относительно вала диска, образующего с корпусом пару трения, и подвижного в осевом...
Таль з ручним приводом
Номер патенту: 5440
Опубліковано: 28.12.1994
Автори: Риков Констянтин Михайлович, Шейнін Віталій Рувімович
МПК: B66D 3/00
Формула / Реферат:
Таль с ручным приводом, включающая снабженный средствами подвески корпус, расположенный в нем приводной вал, барабан с гибким тяговым органом, установленный на указанном валу и фрикционный тормоз, отличающаяся тем, что фрикционный тормоз включает установленный на приводном валу с возможностью осевого перемещения по крайней мере один подпружиненный относительно приводного вала диск, образующий с корпусом пару трения.шток, установленный...
Жалюзі з електричним та ручним керуванням
Номер патенту: 40080
Опубліковано: 16.07.2001
Автори: Лакіза Олексій Миколайович, Петрушевський Іван Іванович, Канішевський Станислав Михайлович, Кустов Дмитро Олексійович
МПК: E06B 9/24, E06B 7/02, E06B 3/00, E06B 9/26
Мітки: електричним, ручним, жалюзі, керуванням
Формула / Реферат:
Жалюзі з електричним та ручним керуванням містить захисне полотно, що встановлене в напрямних, намотане на вал і зібране з пластин, що мають зігнуті стиковочні краї, що утворюють шарніри, і привід обертання вала пересування захисного полотна, що відрізняється тим, що захисне полотно виконане з двох частин, у яких збірні пластини установлені вертикально для горизонтального пересування з можливістю опори на нижню напрямну ізв’язану з приводом...
Попередній патент: Спосіб отримання оксидів азоту
Наступний патент: Сонячний колектор
Випадковий патент: Керамічний формований виріб