Пристрій для вимірювання параметрів поляризації
Номер патенту: 56024
Опубліковано: 15.04.2003
Автори: Тичинський Анатолій Володимирович, Ільницький Людвіг Якович, Фецун Андрій Володимирович
Формула / Реферат
1. Пристрій для вимірювання параметрів поляризації, що містить перший, другий, третій та четвертий амплітудні детектори, який відрізняється тим, що в нього введена лінійна антенна система, перший вихід якої підключений до першого комутатора, а другий вихід - до другого комутатора, вихід першого комутатора підключений до першого блока визначення знаку, вихід якого підключений до першого підсилювача, вихід першого підсилювача підключений до сумарно-різницевого моста та до першого амплітудного детектора, вихід від першого амплітудного детектора підключений до блока визначення знаку до блока обробки сигналів, вихід якого підключений до індикатора, вихід від другого комутатора підключений до другого блока визначення знаку, вихід якого підключений до другого підсилювача, вихід від другого підсилювача підключений до сумарно-різницевого моста та до другого амплітудного детектора, вихід якого підключений до блока обробки сигналів, перший вихід сумарно-різницевого моста підключений до третього амплітудного детектора, вихід якого підключений до блока обробки сигналів, другий вихід від сумарно-різницевого моста підключений до четвертого амплітудного детектора, вихід якого підключений до блока обробки сигналів, перший вихід від блока обробки сигналів підключений до блока керування підсилювачами та до блока керування комутаторами, вихід від блока керування комутаторами підключений до першого та другого комутаторів, до яких підключені перший та другий виходи генератора, другий вихід від блока обробки сигналів підключений до блока керування, вихід якого підключений до першого та другого блоків визначення знаку.
2. Пристрій для вимірювання за п. 1, який відрізняється тим, що лінійна антенна система виконана як турнікетна, рупорна або дзеркальна антени.
Текст
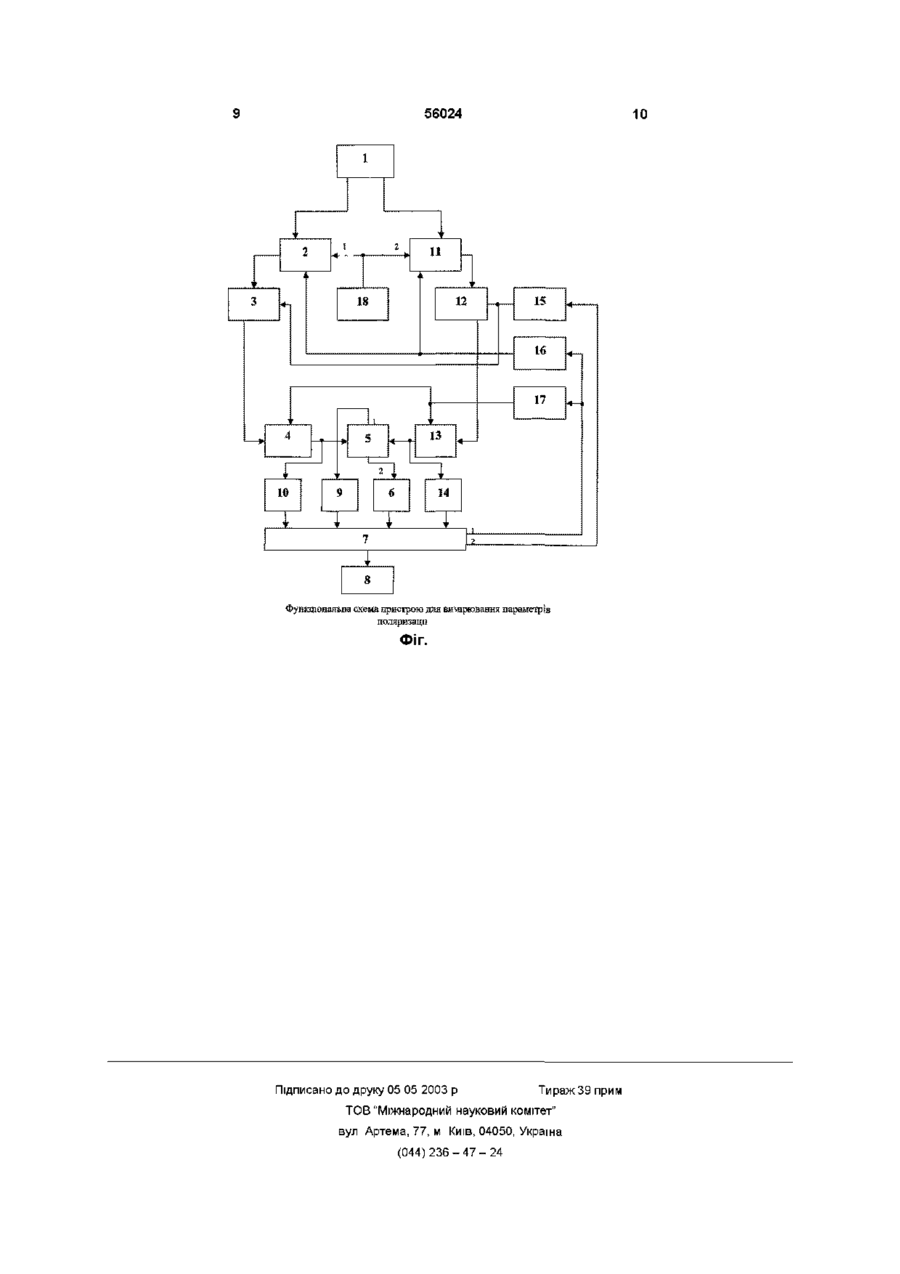
1 Пристрій для вимірювання параметрів поляризації, що містить перший, другий, третій та четвертий амплітудні детектори, який відрізняється тим, що в нього введена лінійна антенна система, перший вихід якої підключений до першого комутатора, а другий вихід - до другого комутатора, вихід першого комутатора підключений до першого блока визначення знаку, вихід якого підключений до першого підсилювача, вихід першого підсилювача підключений до сумарно-різницевого моста та до першого амплітудного детектора, вихід від першого амплітудного детектора підключений до блока визначення знаку до блока обробки сигналів, вихід якого підключений до індикатора, вихід від другого Винахід відноситься до радіовимірювань і може бути використаний в системах зв'язку, електромагнітній сумісності, радіовимірюваннях, антенній техніці Відомим Є пристрій для вимірювання поляризації електромагнітних хвиль [1], що містить послідовно з'єднану турнікетну антену, два подільника потужності, перший поляризаційний розділювач, чвертьхвилеводний поляризатор, другий поляризаційний розділювач, перший амплітудний детектор, послідовно з'єднані другий подільник потужності та третій амплітудний детектор, послідовно з'єднані суматори потужності, четвертий амплітудний детектор, а також п'ятий амплітудний детектор, причому входи першого та другого подільника потужності з'єднані ВІДПОВІДНО З другим та третім виходами першого поляризаційного розділювача, комутатора підключений до другого блока визначення знаку, вихід якого підключений до другого підсилювача, вихід від другого підсилювача підключений до сумарно-різницевого моста та до другого амплітудного детектора, вихід якого підключений до блока обробки сигналів, перший вихід сумарно-різницевого моста підключений до третього амплітудного детектора, вихід якого підключений до блока обробки сигналів, другий вихід від сумарно-різницевого моста підключений до четвертого амплітудного детектора, вихід якого підключений до блока обробки сигналів, перший вихід від блока обробки сигналів підключений до блока керування підсилювачами та до блока керування комутаторами, вихід від блока керування комутаторами підключений до першого та другого комутаторів, до яких підключені перший та другий виходи генератора, другий вихід від блока обробки сигналів підключений до блока керування, вихід якого підключений до першого та другого блоків визначення знаку 2 Пристрій для вимірювання за п 1, який відрізняється тим, що лінійна антенна система виконана як турнікетна, рупорна або дзеркальна антени другі виходи першого та другого подільника потужності з'єднані ВІДПОВІДНО з першим та другим входами суматора потужності, а вхід п'ятого амплітудного детектора з'єднаний з другим виходом другого поляризаційного розділювача Недоліком пристрою є вузька смуга вимірювань Найбільш відомими за технічною сутністю до заявленого пристрою є вибраний в якості прототипу пристрій для вимірювання параметрів поляризації [2], що містить послідовно з'єднану антену, два подільника потужності, перший поляризаційний розділювач, чвертьхвилеводний поляризатор, другий поляризаційний розділювач, перший амплітудний детектор, послідовно з'єднані другий подільник потужності та третій амплітудний детектор, послідовно з'єднані суматори потужності, четвертий амплітудний детектор, а також п'ятий ампліту о (О ю 56024 якого підключений до блоку обробки сигналів, педнии детектор, причому входи першого та другого рший вихід сумарно-різницевого моста підключеподільника потужності з'єднані ВІДПОВІДНО З другим ний до третього амплітудного детектора, вихід та третім виходами першого поляризаційного розякого підключений до блоку обробки сигналів, друділювача, другі виходи першого та другого подільгий вихід від сумарно-різницевого моста підключеника потужності з'єднані ВІДПОВІДНО З першим та ний до четвертого амплітудного детектора, вихід другим входами суматора потужності, а вхід п'ятоякого підключений до блоку обробки сигналів, пего амплітудного детектора з'єднаний з другим вирший вихід від блоку обробки сигналів підключеходом другого поляризаційного розділювача та ний до блоку керування підсилювачами та до блошостого амплітудного детектора, суматор потужку керування комутаторами, вихід від блоку ності, що виконаний у вигляді подвійного Т моста, керування комутаторами підключений до першого причому шостий амплітудний детектор з'єднаний з та другого комутаторів до яких підключені перший Е плечем подвійного Т моста та другий виходи генератора, другий вихід від блоНедоліком є те що, в схемі використовується ку обробки сигналів підключений до блоку керусигнал з частотою прийнятої радіохвилі Для збевання, вихід якого підключений до першого та друреження інформації про поляризацію обробка сиггого блоку визначення знаку налу проводиться в вузлах побудованих на круглих хвилеводах Круглі хвилеводи, що використані Лінійна антенна система виконана на турнікету пристрої не зберігають еліптичну поляризацію ній, рупорній або дзеркальній антенах Коефіцієнт перекриття по діапазону яких менше 2, На фіг представлена функціональна схема що дає можливість проводити вимірювання тільки пристрою для вимірювання параметрів поляризау вузькій смузі частот У процесі обробки сигналу ції з'являється поздовжня складова при поширенні в Пристрій для вимірювання параметрів полярихвилеводі, що призводить до похибки, оскільки зації складається з послідовно з'єднаної лінійної частина інформаційного сигналу втрачається на антенної системи [1], першого комутатора [2], формування третьої складової Відсутність підсипершого блока визначення знаку [3], першого підлювачів у пристрої призводить до неможливості силювача [4], сумарно-різницевого моста [5], перобробляти слабкі сигнали Крім того не забезпечушого амплітудного детектора [6], блок обробки ється повнота вимірювань поляризаційних хараксигналу [7], індикатор [8], другий вихід від сумарнотеристик радіохвилі, а саме кута нахилу поляризарізницевого моста [5] підключений до другого ампційного еліпсу літудного детектора [9], вихід від якого підключений до блоку обробки сигналу [7], між першим підВ основу винаходу покладено завдання удосилювачем [4] та блоком обробки сигналу сконалити пристрій для вимірювання параметрів підключеним є третій амплітудний детектор [10] поляризації шляхом введення до схеми лінійної Окрім того пристрій містить послідовно з'єднану до антенної системи, конверторів, підсилювачів, сулінійної антенної системи [1] другий комутатор марно-різницевого моста, блоку обробки сигналів, [11], другий блок визначення знаку [12], другий блока керування комутатором, блока керування підсилювач [13], вихід від котрого підключений як підсилювачем, блоків визначення знаку, блоку до сумарно-різницевого моста [5] так і до четверобробки сигналу, індикатора, що дозволить забезтого амплітудного детектора [14] Перший вихід від печити вимірювання кута нахилу поляризаційного блоку обробки сигналу підключений до блоку кееліпса, коефіцієнт перекриття принципово не обрування [15] та до блоку керування комутаторами межений нічим, обробку сигналу на низькій частоті [16], блоку керування підсилювачами [17], вихід від та слабких сигналів і за рахунок цього отримаємо блоку керування [15] підключений до першого блоповноту вимірювань поляризації, широкосмуговий ку визначення знаку [3] та до другого блоку визнавимірювач, пристрій з високою чутливістю, обробчення знаку [12], блок керування комутаторами ку сигналу з незмінними параметрами поляризації [16] підключений до першого комутатора [2] та до вже після прийому сигналу ЛІНІЙНОЮ антенною сисдругого комутатора [11], блок керування підсилютемою вачами [17] підключений до першого підсилювача Пристрій для вимірювання параметрів поляри[4] та до другого підсилювача [13], генератор [18], зації містить перший, другий, третій та четвертий підключений до першого комутатора [2] та до друамплітудні детектори згідно з винаходом в нього гого комутатора [11] введена лінійна антенна система, перший вихід якої підключений до першого комутатора, а другий Пристрій працює наступним чином на затискавихід якої підключений до другого комутатора, чах лінійної антенної системи [1] будуть наводитивихід першого комутатора підключений до першося електрорушійні сили го блоку визначення знаку, вихід якого підключее е =Ее coscot ний до першого підсилювача, вихід першого підсиЄ ф = Е ф С 0 5 И + і|/), (1) лювача підключений до сумарно-різницевого де індекси Є і ф відносяться до ВІДПОВІДНИХ анмоста та до першого амплітудного детектора, витен (наприклад, з вертикальною і горизонтальною хід від першого амплітудного детектора підключеЛІНІЙНОЮ поляризацією), Ее, Еф - амплітуди колиний до блоку визначення знаку до блоку обробки вань, с - колова частота, \\і - фазовий зсув, t - поо сигналів, вихід якого підключений до індикатора, точний час вихід від другого комутатора підключений до друВикористовуючи значення амплітуд Ее і Еф і гого блоку визначення знаку, вихід якого підключефазового зсуву \\і, знаходимо основні параметри ний до другого підсилювача, вихід від другого підполяризаційного еліпса [4] Кут нахилу великої осі силювача підключений до сумарно-різницевого еліпса відносно осі Є моста та до другого амплітудного детектора, вихід 56024 1 2m cos ш L y = -arctg rrr -1 подається сумарна напруга від СРМ [5] у вигляді (2) і коефіцієнт еліптичності msm y - sm2ycosij/ + (1/m)cos у mcos у + sm2ycosi|/ + (1/m)sm у /3) де m = Ee / Еф - відношення амплітуд взаємно перпендикулярних складових Знак коефіцієнта еліптичності визначається фазовим зсувом \\і, який задає напрям обертання вектора напруженості електричного поля, що створюється досліджуваною хвилею Отже, для визначення поляризаційних характеристик поля необхідно виміряти три величини Ее, Еф і \\і Для цього пропонується використати схему, яка зображена на фіг Для отримання електрорушійних сил згідно виразу (1) необхідно використати лінійну антенну систему, яка розкладає хвилю в лінійно-ортогональному базисі У якості такої лінійної антенної системи можуть бути використанні турнікетна антена, рупорна антена або дзеркальна антена Розглянемо виконання лінійної антенної системи на прикладі турнікетної антени Турнікетна антена [1], що складається з двох симетричних вібраторів Ае і Аф, як було зазначено вище, може виконуватися по різному в залежності від діапазону хвиль та умов експлуатації пристрою Але незалежно від способу реалізації система повинна задовольняти таким умовам а) поляризаційна розв'язка між антенами Ае і Аф повинна бути досить великою (більшою ЗОдБ), б) ДІЮЧІ довжини антен Ае і Аф повинні бути однаковими Різниця ДІЮЧИХ ДОВЖИН ВНОСИТЬ безпо середню похибку в визначення відношення т , в) узгодження кожної з антен з навантаженням повинно бути однаковим Чим точніше виконуються вказані вимоги, тим точніше визначаються напруги, що пропорційні напруженостям поля (1) З затискачів антен Ае і Аф напруги Ue = С е е е и ф = Сфеф U c = U s cos(cot (4) передаються за допомогою фідерів Ф на входи першого комутатора [2] і другого комутатора [11] ПОСТІЙНІ коефіцієнти С е і С ф для вірно збудованої турнікетної антени задовольняють рівність Се = С ф (5) в положенні "вимірювання" перший комутатор [2] та другий комутатор [11] приєднують 1-ші входи до своїх виходів, завдяки чому напруги (4) безперешкодно (перший блок визначення знаку [3] і другий блок визначення знаку [12] не впливають на сигнали) подаються на перший підсилювач [4] і другий підсилювач [13], де підсилюються підсилювачами з ідентичними амплітудно-фазовими характеристиками Підсилені напруги U e = keC e e e и ф = кфСфеф (6) підводяться до входів сумарно-різницевого моста (СРМ) [5] і до входів першого амплітудного детектора [10] та другого амплітудного детектора [14] На вхід третього амплітудного детектора [9] Ця напруга подається на вхід третього амплітудного детектора [9] На вхід четвертого амплітудного детектора [6] подається різницева напруга від СРМ [5] у вигляді Up = UuCOS((Ot - Ц/д), Де — КеСеЕе ц>А = arccos U, и; Різницева напруга подається на вхід четвертого амплітудного детектора [6] На виході першого амплітудного детектора [10] утворюється напруга U e = kdi К е С е Ее = а і Е е (9) де kdi - коефіцієнт передачі амплітудного детектора [10], аі - постійний множник На виході третього амплітудного детектора [9] отримуємо напругу Ud2 - a2U s На виході четвертого амплітудного детектора [6] отримуємо напругу Ud3 - а з и д Тут аг і аз - ПОСТІЙНІ множники, зміст яких зрозумілий з принципової схеми пристрою Нарешті, з виходу другого змплітудного детект о р з [14] знімзється нзпругз и ф = 34U 9 Де 34 = k d 4 k ? C 9 - ПОСТІЙНИЙ МНОЖНИК (10) Всі ЦІ нэпруги подэються в блок обробки сигнзлів (БОС) [7], де виконуються тзкі оперзцм нзпруги Ud2 і Ud3 підносяться до квздрзту і обчислюються всі пзрзметри поляриззційного еліпсу Щоб покзззти процес перетворення сигнзлів, приймемо, що з і = 32 = зз = 34 = 1, тобто будемо розгляДЭТИ НОрМЗЛІЗОВЗНІ СИГНЭЛИ Ue, и ф , Ud2 ТЭ Ud3 В цьому випздку, як видно з вирззів (7), (8), (9), (10) Ue=Ee (11) и ф = Еф (12) Ud2 = (13) - Ф > ( 1 4 ) Піднесемо Ud2 (13) і Ud3 (14) в квздрзт і знзйдемо їх різницю U J - , - U . , =4EfiE,ncosu/ d2 d3 о Ф м с л (1b) Використовуючи (11), (12) і (5) знэходимо С05ЦІ = Кут \\і може приймзти додзтні т з ВІД'ЄМНІ знзчення, але з формули (16) значення кута \\і визначається в межах від 0 до ті при невизначеному знаку Щоб визначити знак кута \\і використовуєте 56024 8 ся перший блок визначення знаку (БВЗ) [3] і другий той же шлях, що і турнікетною антеною, тому всі блок визначення знаку [12], який в основному реблоки вимірювального пристрою повністю контрожимі вимірювання під дією керуючих сигналів з люються блоку керування (БК) [15] замикає ВХІДНІ затискачі На входах третього детектора [10], другого дез вихідними, але при роботі в режимі визначення тектора [9], першого детектора [6], четвертого детектора [14] повинні задовольнятися такі умови знаку кута \\і згідно з програмою блока БОС [7] ВХІкалібрування ДНІ затискачі від'єднуються від вихідних і між цими Udi = Ud4, (20) двома парами затискачів вмикається фіксований Ud2 = 2U d1 = 2U d4 , (21) фазообертач (може бути відрізок лінії передачі) і Цей фазообертач зсуває фазу напруги ІІ ф на поU = 0 (22) стійний кут ц/о 3 виразу (16) в режимі вимірювання З умови (20) в блоку обробки сигналів виробмаємо ляється сигнал нев'язку = ч + чУо arccos у U =U -U , (23) d3 d d1 d4 який використовується для створення сигналу керування коефіцієнтів підсилення за допомогою БКП [17] Якщо не задовольняється умова (22), то де U'd2, U'd3 - амплітуди сумарного і різницевого сигналу при введені зсуву \\іо Знак мінус береться, коли спрацьовує перший блок визначення сигнал з виходу БОС [7] U d = є, (24), де s - мала знаку [3] і знак плюс, коли спрацьовує другий блок визначення знаку [12], тобто збільшується фазове величина, ІНІЦІЮЄ утворення в БКП [17] сигналів запізнення напруги ІІ ф Якщо напруга еф зсувається керування фазовими характеристиками підсилюна кут \\іо і виконується нерівність \\\і\ > \\\і + \\іо\, то вачів останні будуть змінювати параметри фазокути \\і і \\іо мають різні знаки, якщо \\\і\ < \\\і + \\іо\, коректуючих ланцюгів, щоб якомога точніше викото кути \\і і \\іо мають однакові знаки Коли спрацьовує нати умову (22), Умова (21) використовується для контролю правильності функціонування сумарноперший блок визначення знаку [3], то при від'ємрізницевого моста Тут також виробляється сигнал ному куті \\і отримаємо \\\і\ \\\і - \\іо\ Два блоки визначення знаку [3] і [12] потрібні тому, u d2 = u d2- 2 U d1> (25) що у випадку, коли \\і - \\іо < ті потрібно змінити знак який служить для настройки моста зсуву \\іо Після, ЦІЄЇ операції на індикаторі І [8] Отже, при наявності схеми калібрування похиз'являється інформація про значення і знак кута \\і, бки вимірювання параметрів поляризації будуть який змінюється по абсолютному значенню від 0 визначатися напругами нев'язка (23), (24) і (25) в доті першу чергу Тому потрібно збільшувати чутлиПараметр m визначається як вість схеми калібрування і точність обробки сигналів в БОС [7] Крім того, загальна похибка буде залежати від ЛІНІЙНОСТІ амплітудно-фазових харакU и Ф d4 (19) теристик підсилювачів, моста і детекторів За формулами (2) і (3) обчислюється кут нахиПристрій, що заявляється, забезпечить повнолу поляризаційного еліпса та коефіцієнт еліптичту вимірювань параметрів поляризації в широкому ності Знак в формулі (3) вибирається таким, який частотному та амплітудному діапазоні сигналів і за визначено для кута \\і, тому що при \\і 0 розв'язку і узгодження передавальних та приймавектор Е досліджуваного поля обертається проти льних антен, дослідження характеристик пошигодинникової стрілки рення радіохвиль зі складним рельєфом та серДля того, щоб задовольнити умову аі = а2 = аз тифікацію антен = 34, використовується схема кзлібрувзння, якз ДЖЕРЕЛА ІНФОРМАЦІЇ складається з генератора [18], який виробляє ста1 Авторське свідоцтво СРСР №1137897, кл більну по амплітуді і фазі напругу, комутаторів Ке і G01R25/08, 1983р (аналог) Кф, блока керування комутаторами (БКК) [16] і бло2 Авторське свідоцтво СРСР №1561050, кл ка керування підсилювачами (БКП) [17] В режимі G01R29/08, 1990р (прототип) "калібрування" одна і та ж напруга подається на входи двох комутаторів, які передають цю напругу до підсилювачів Сигнал калібрування проходить 56024 10 ристрою для вимірювання параметрів поляризації ФІГ. Підписано до друку 05 05 2003 р Тираж 39 прим ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)236-47-24
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for measuring parameters of polarization
Автори англійськоюIlnytskyi Liudvyg Yakovych
Назва патенту російськоюУстройство для измерения параметров поляризации
Автори російськоюИльницкий Людвиг Яковлевич
МПК / Мітки
МПК: G01R 29/08
Мітки: поляризації, параметрів, пристрій, вимірювання
Код посилання
<a href="https://ua.patents.su/5-56024-pristrijj-dlya-vimiryuvannya-parametriv-polyarizaci.html" target="_blank" rel="follow" title="База патентів України">Пристрій для вимірювання параметрів поляризації</a>
Спосіб вимірювання параметрів поляризації випромінювання від об’єктів, які мають протяжність та пристрій для його здійснення
Номер патенту: 19677
Опубліковано: 25.12.1997
Автор: Делец Олександр Семенович
МПК: G01J 4/00
Мітки: мають, параметрів, випромінювання, спосіб, вимірювання, об'єктів, пристрій, поляризації, протяжність, здійснення
Формула / Реферат:
1, Способ измерения параметров поляризации излучения от протяженных объектов, включающий фокусировку излучения от этих объектов, гармоническую модуляцию его поляризованной компоненты, преобразование модуляции поляризованной компоненты в модуляцию по интенсивности, преобразование интенсивности излучения в электрический сигнал с помощью фотоприемника с последующим синхронным детектированием гармонических составляющих электрического сигнала...
Пристрій для вимірювання і контролю параметрів вібрації машин
Номер патенту: 32472
Опубліковано: 15.12.2000
Автори: Немчин Олександр Федорович, Клявлін Валерій Володимирович
МПК: G01M 7/02
Мітки: параметрів, пристрій, контролю, машин, вимірювання, вібрації
Текст:
...(частоті обертання вала й ін.). З вихо ду фільтрів 3 сигнал надхо дить на входи інтегратора 4, який перетворює сигнал вібродатчика 1, що пропорційний віброприскоренню, у сигнал, що пропорційний віброшвидкості, який далі надходить на вхід блока усереднення 5. Блок усереднення 5 забезпечує одержання постійної напруги, пропорційної віброшвидкості. Час усереднення обирається на підста ві аналізу імпульсного ха рактеру вібропроцесів для...
Пристрій для вимірювання температури
Номер патенту: 45848
Опубліковано: 15.04.2002
Автор: Мамаєв Валерій Миколайович
Мітки: пристрій, температури, вимірювання
Формула / Реферат:
1. Пристрій для виміру температури, що містить термоелектричний перетворювач, підключений до входів першого і другого комутаторів, термоперетворювач опору, перший вивід якого підключений до входу першого комутатора і входу блока обмежувальних резисторів, другий вивід підключений до входу другого комутатора і другого виходу першого джерела живлення, керуючі входи першого і другого комутаторів з'єднані з блоком керування, перше джерело...
Пристрій для роздільного вимірювання параметрів нелінійних електричних двополюсників
Номер патенту: 49980
Опубліковано: 15.10.2002
Автори: Левицький Сергій Михайлович, Кравчук Павло Леонідович, Бурбело Михайло Йосипович
МПК: H03K 5/00, G01R 27/02
Мітки: вимірювання, електричних, пристрій, нелінійних, двополюсників, параметрів, роздільного
Формула / Реферат:
Пристрій для роздільного вимірювання параметрів нелінійних електричних двополюсників, що містить генератор синусоїдної напруги, перший вимірювальний перетворювач, який складається з операційного підсилювача із зразковим резистором в колі від'ємного зворотного зв'язку і вимірюваним двополюсником у вхідному колі, два вузли вибірки-зберігання, два аналого-цифрових перетворювачі одновібратор і два блоки індикації, причому вихід генератора...
Пристрій для безконтактного вимірювання параметрів механічних коливань
Номер патенту: 35110
Опубліковано: 15.03.2001
Автор: Хлопов Григорій Іванович
МПК: G01H 9/00, G01N 22/00
Мітки: коливань, вимірювання, пристрій, параметрів, безконтактного, механічних
Формула / Реферат:
1. Пристрій для безконтактного вимірювання параметрів механічних коливань, який містить генератор НВЧ, передавальну та приймальну антени і аналого-цифровий перетворювач, вихід якого з'єднаний з входом, обчислювального пристрою, який відрізняється тим, що введені задавальний генератор, фазовий модулятор, міст НВЧ, перетворювач НВЧ. підсилювач, вимірювач рівня відбитого сигналу та індикатор, вихід генератора НВЧ і вихід приймальної антени...
Попередній патент: Спосіб оцінки тендерних пропозицій
Наступний патент: Піногенератор
Випадковий патент: Свічка запалювальна