Спосіб визначення координат рухомих об’єктів і пристрій для його здійснення
Номер патенту: 56102
Опубліковано: 15.04.2003
Автори: Яковлєв Олександр Васильович, Колесніков Олександр Віталійович, Масеха Олег Петрович

Формула / Реферат
1. Спосіб визначення координат рухомих об'єктів, що включає послідовне випромінювання за допомогою абонентського сигналізатора, встановленого на рухомому об'єкті, кодового керуючого й адресного кодового сигналів, прийом і обробку цих сигналів на не менш ніж трьох базисних станціях, розміщених у точках з відомими координатами, передачу по каналу зв'язку й обробку отриманих даних, який відрізняється тим, що кожна з базисних станцій, після прийому сигналів абонентського сигналізатора, регенерує ці сигнали, затримує їх на фіксований, індивідуальний для кожної з базисних станцій час, доповнює їх кодовим адресним сигналом базисної станції і перевипромінює їх по радіоканалу на центральну станцію, при цьому центральна станція розміщена в точці з відомими координатами, після прийому сигналів від базисних станцій регенерує їх, вимірює інтервали часу між кодовими керуючими сигналами, перевипроміненими кожною з базисних станцій, і по не менш ніж двох інтервалах часу, пропорційних різницям відстаней між рухомим об'єктом і базисними станціями, визначає координати рухомого об'єкта.
2. Пристрій для визначення координат рухомих об'єктів, що складається з не менш ніж одного абонентського сигналізатора, встановленого на рухомому об'єкті, не менш ніж трьох базисних станцій з радіоприймальною частиною, розміщених у точках з відомими координатами, не менш ніж однієї центральної станції, розміщеної в точці з відомими координатами, який відрізняється тим, що додатково обладнаний радіопередавачем, цифровою лінією затримки та пристроєм модифікації сигналів, при цьому кожна з базисних станцій обладнана пристроєм регенерації сигналів, вхід якого з'єднаний з виходом радіоприймальної частини, а вихід - із входом цифрової лінії затримки, вихід якої з'єднаний із входом пристрою модифікації сигналів, вихід якого з'єднаний із входом радіопередавача, аналогічного абонентському сигналізатору, а центральна станція розміщена в точці з відомими координатами, обладнана одноканальною радіоприймальною частиною, вихід якої з'єднаний із входом пристрою регенерації сигналів, вихід якого з'єднаний із входом пристрою виміру часових інтервалів, вихід якого з'єднаний із входом обчислювального блока.
Текст
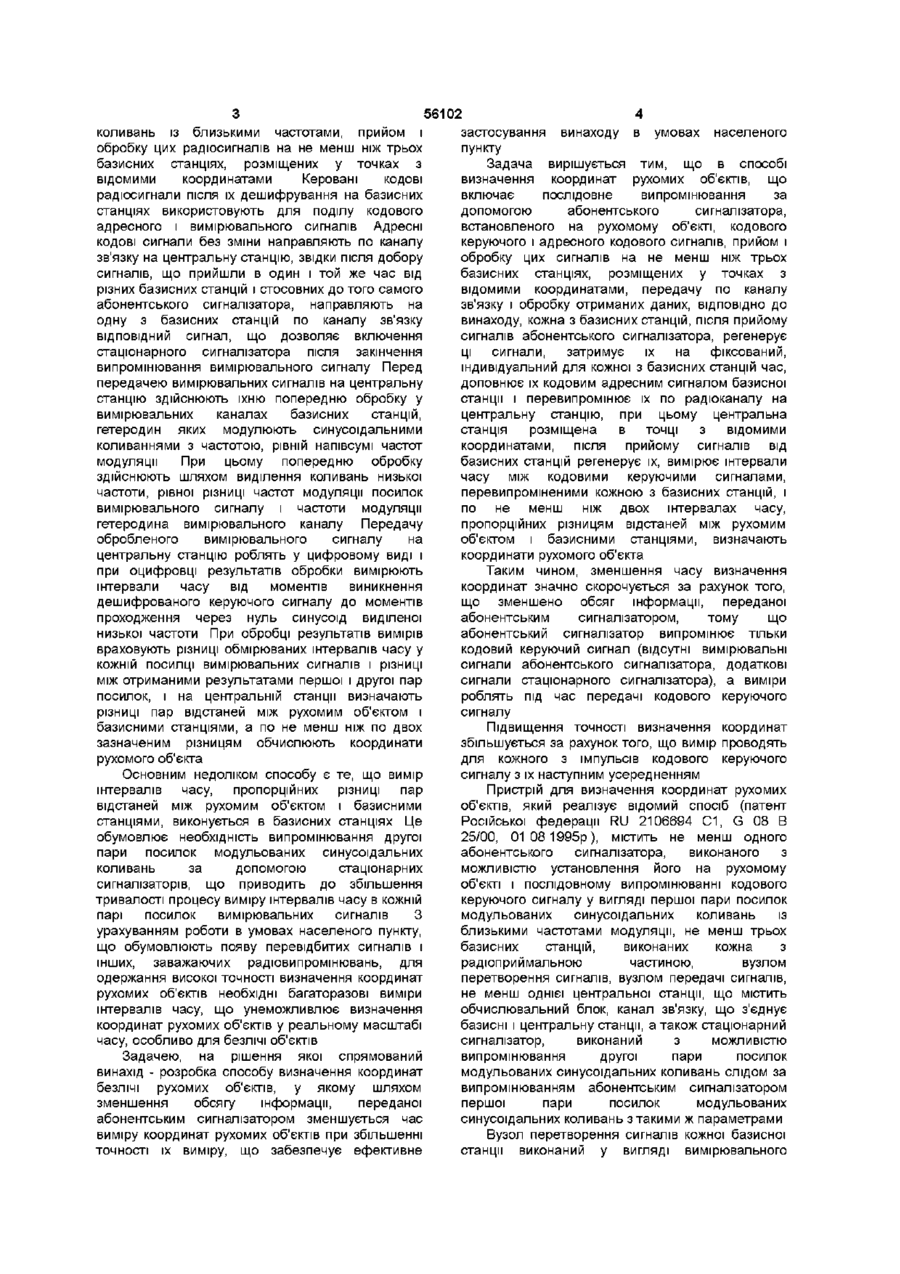
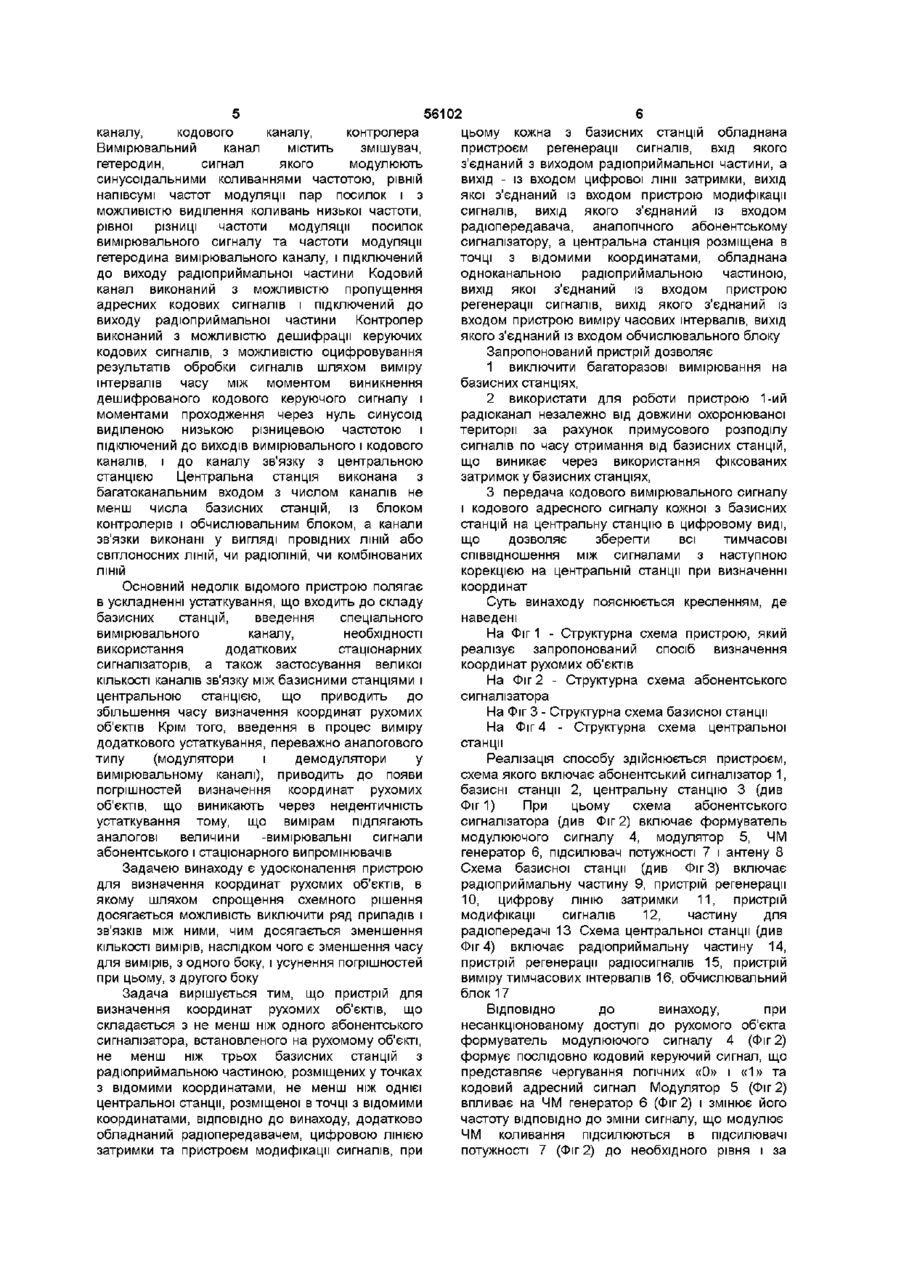
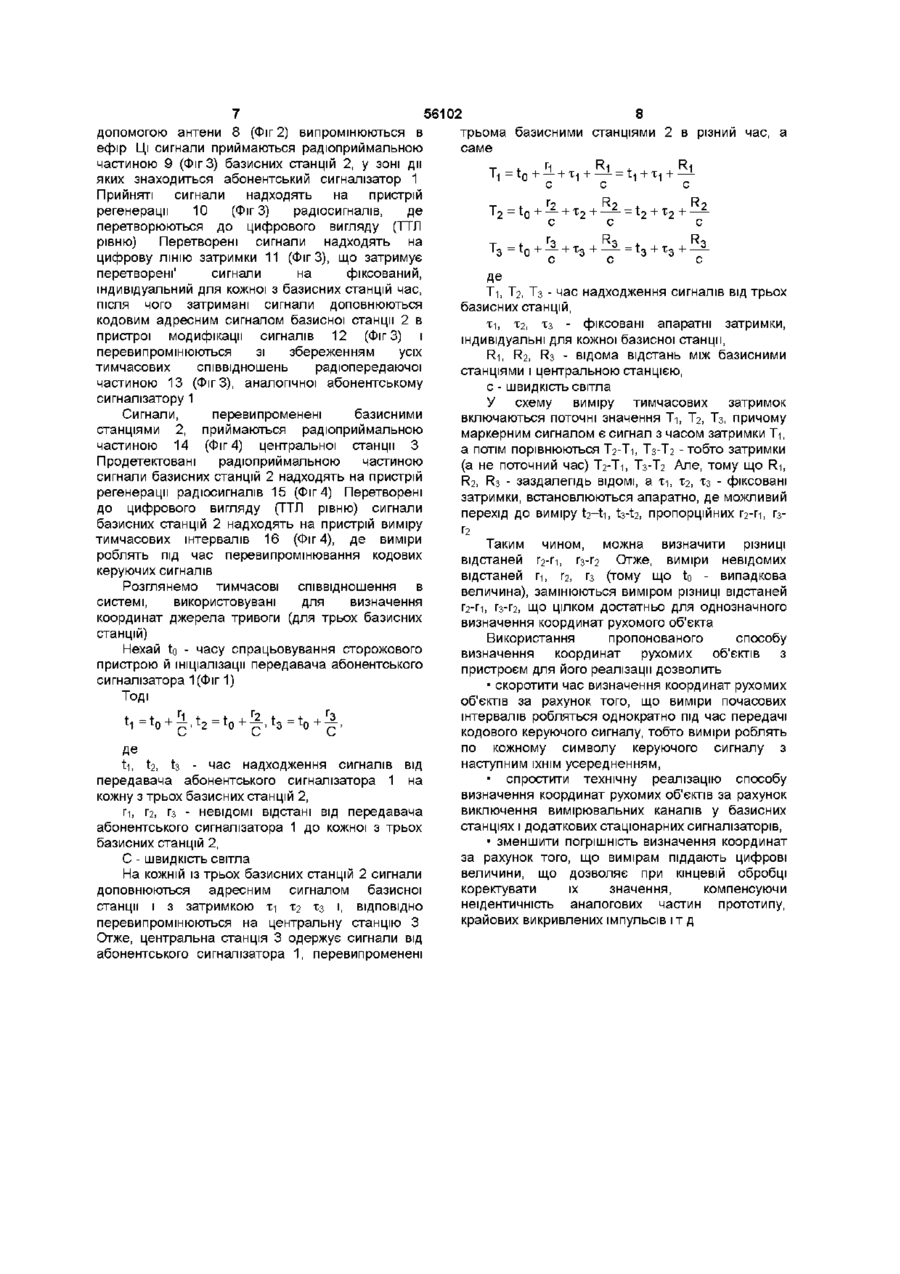
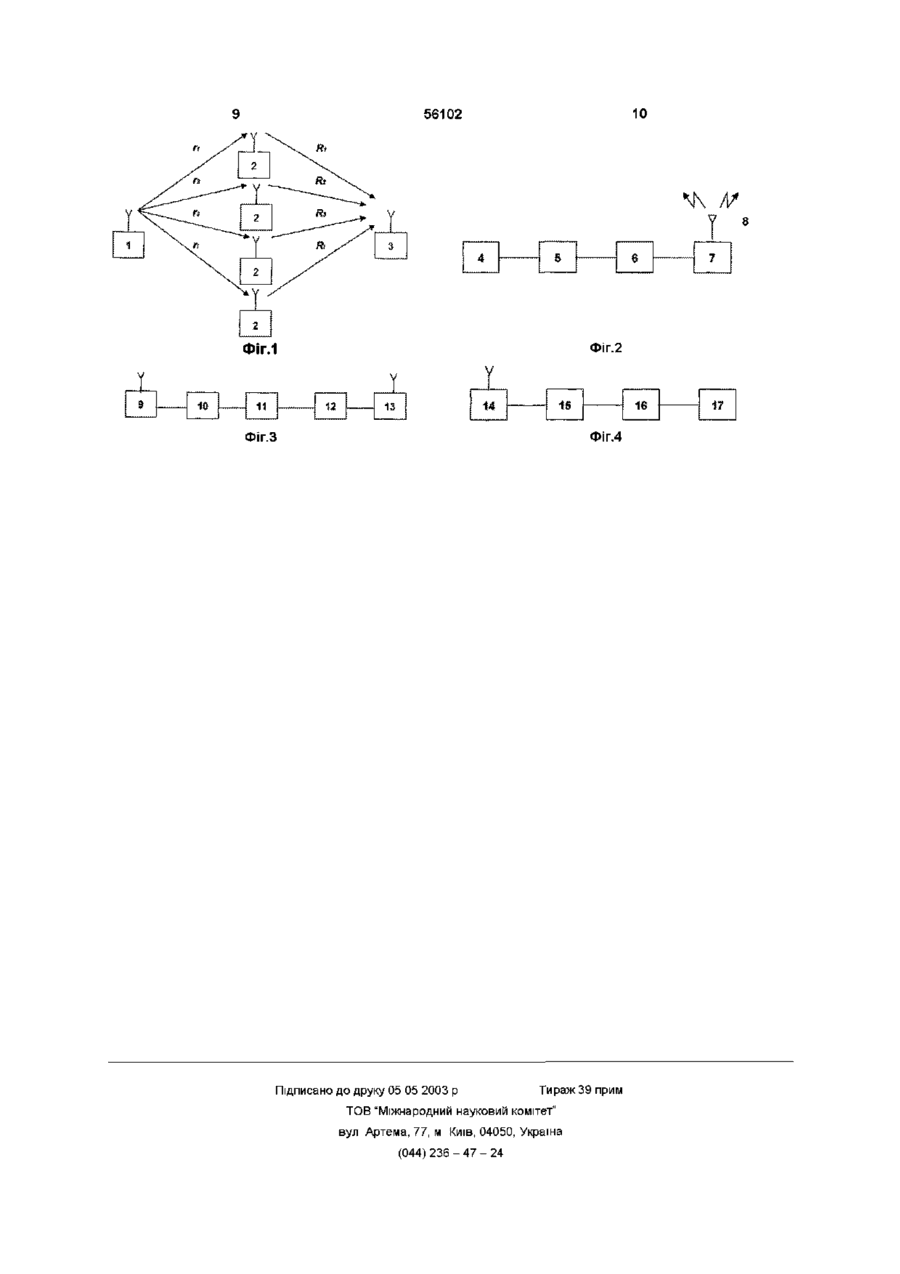
1 Спосіб визначення координат рухомих об'єктів, що включає послідовне випромінювання за допомогою абонентського сигналізатора, встановленого на рухомому об'єкті, кодового керуючого й адресного кодового сигналів, прийом і обробку цих сигналів на не менш ніж трьох базисних станціях, розміщених у точках з відомими координатами, передачу по каналу зв'язку й обробку отриманих даних, який відрізняється тим, що кожна з базисних станцій, після прийому сигналів абонентського сигналізатора, регенерує ці сигнали, затримує їх на фіксований, індивідуальний для кожної з базисних станцій час, доповнює їх кодовим адресним сигналом базисної станції і перевипромінює їх по радіоканалу на центральну станцію, при цьому центральна станція розміщена в точці з відомими координатами, після прийому сигналів від базисних станцій регенерує їх, вимірює інтервали часу між кодовими керуючими сигналами, перевипромшеними кожною з базисних станцій, і по не менш ніж двох інтервалах часу, пропорційних різницям відстаней між рухомим об'єктом і базисними станціями, визначає координати рухомого об'єкта 2 Пристрій для визначення координат рухомих об'єктів, що складається з не менш ніж одного абонентського сигналізатора, встановленого на рухомому об'єкті, не менш ніж трьох базисних станцій з радіоприймальною частиною, розміщених уточках з відомими координатами, не менш ніж однієї центральної станції, розміщеної в точці з відомими координатами, який відрізняється тим, що додатково обладнаний радіопередавачем, цифровою ЛІНІЄЮ затримки та пристроєм модифікації сигналів, при цьому кожна 3 базисних станцій обладнана пристроєм регенерації сигналів, вхід якого з'єднаний з виходом радіоприймальної частини, а вихід - із входом цифрової лінії затримки, вихід якої з'єднаний із входом пристрою модифікації сигналів, вихід якого з'єднаний із входом радіопередавача, аналогічного абонентському сигналізатору, а центральна станція розміщена в точці з відомими координатами, обладнана одноканальною радіоприймальною частиною, вихід якої з'єднаний із входом пристрою регенерації сигналів, вихід якого з'єднаний із входом пристрою виміру часових інтервалів, вихід якого з'єднаний із входом обчислювального блока (О ю Винахід відноситься до радіосистем визначення координат рухомих об'єктів з визначенням координат при нападі на них чи несанкціонованому проникненні Пропонований пристрій (радіосистема) може бути використано правоохоронними органами для організації технічної охорони як рухомих, так і нерухомих об'єктів Найбільш близьким до запропонованого способу і пристрою є система визначення координат рухомих об'єктів за патентом Російської Федерації (RU 2106694 С1, G 08 В 25/00, 01 08 1995р), у якому на рухомому об'єкті розміщають джерело сигналів тривоги (абонентський радіосигналізатор), а в районах передбачуваного перебування об'єкта рівномірно розміщують мережу пунктів з базисними станціями, зв'язаними по лінії зв'язку з пунктом обчислення координат (центральною станцією), а також у точці з відомими координатами розміщають стаціонарні сигналізатори Відомий спосіб визначення координат рухомих об'єктів включає послідовне випромінювання за допомогою абонентського радіосигнал ізатора, встановленого на рухомому об'єкті, кодового керованого радіосигналу, кодового адресного сигналу і вимірювального радіосигналу у вигляді пари посилок модульованих синусоїдальних коливань із близькими частотами, прийом і обробку цих радіосигналів на не менш ніж трьох базисних станціях, розміщених у точках з відомими координатами Керовані кодові радіосигнали після їх дешифрування на базисних станціях використовують для поділу кодового адресного і вимірювального сигналів Адресні кодові сигнали без зміни направляють по каналу зв'язку на центральну станцію, звідки після добору сигналів, що прийшли в один і той же час від різних базисних станцій і стосовних до того самого абонентського сигналізатора, направляють на одну з базисних станцій по каналу зв'язку ВІДПОВІДНИЙ сигнал, що дозволяє включення стаціонарного сигналізатора після закінчення випромінювання вимірювального сигналу Перед передачею вимірювальних сигналів на центральну станцію здійснюють їхню попередню обробку у вимірювальних каналах базисних станцій, гетеродин яких модулюють синусоїдальними коливаннями з частотою, рівній напівсумі частот модуляції При цьому попередню обробку здійснюють шляхом виділення коливань низької частоти, рівної різниці частот модуляції посилок вимірювального сигналу і частоти модуляції гетеродина вимірювального каналу Передачу обробленого вимірювального сигналу на центральну станцію роблять у цифровому виді і при оцифровці результатів обробки вимірюють інтервали часу від моментів виникнення дешифрованого керуючого сигналу до моментів проходження через нуль синусоїд виділеної низької частоти При обробці результатів вимірів враховують різниці обмірюваних інтервалів часу у кожній посилці вимірювальних сигналів і різниці між отриманими результатами першої і другої пар посилок, і на центральній станції визначають різниці пар відстаней між рухомим об'єктом і базисними станціями, а по не менш ніж по двох зазначеним різницям обчислюють координати рухомого об'єкта Основним недоліком способу є те, що вимір інтервалів часу, пропорційних різниці пар відстаней між рухомим об'єктом і базисними станціями, виконується в базисних станціях Це обумовлює необхідність випромінювання другої пари посилок модульованих синусоїдальних коливань за допомогою стаціонарних сигналізаторів, що приводить до збільшення тривалості процесу виміру інтервалів часу в кожній парі посилок вимірювальних сигналів З урахуванням роботи в умовах населеного пункту, що обумовлюють появу перевідбитих сигналів і інших, заважаючих радювипромінювань, для одержання високої точності визначення координат рухомих об'єктів необхідні багаторазові виміри інтервалів часу, що унеможливлює визначення координат рухомих об'єктів у реальному масштабі часу, особливо для безлічі об'єктів Задачею, на рішення якої спрямований винахід - розробка способу визначення координат безлічі рухомих об'єктів, у якому шляхом зменшення обсягу інформації, переданої абонентським сигналізатором зменшується час виміру координат рухомих об'єктів при збільшенні точності їх виміру, що забезпечує ефективне 56102 застосування винаходу в умовах населеного пункту Задача вирішується тим, що в способі визначення координат рухомих об'єктів, що включає послідовне випромінювання за допомогою абонентського сигналізатора, встановленого на рухомому об'єкті, кодового керуючого і адресного кодового сигналів, прийом і обробку цих сигналів на не менш ніж трьох базисних станціях, розміщених у точках з відомими координатами, передачу по каналу зв'язку і обробку отриманих даних, ВІДПОВІДНО ДО винаходу, кожна з базисних станцій, після прийому сигналів абонентського сигналізатора, регенерує ці сигнали, затримує їх на фіксований, індивідуальний для кожної з базисних станцій час, доповнює їх кодовим адресним сигналом базисної станції і перевипромінює їх по радіоканалу на центральну станцію, при цьому центральна станція розміщена в точці з відомими координатами, після прийому сигналів від базисних станцій регенерує їх, вимірює інтервали часу між кодовими керуючими сигналами, перевипроміненими кожною з базисних станцій, і по не менш ніж двох інтервалах часу, пропорційних різницям відстаней між рухомим об'єктом і базисними станціями, визначають координати рухомого об'єкта Таким чином, зменшення часу визначення координат значно скорочується за рахунок того, що зменшено обсяг інформації, переданої абонентським сигналізатором, тому що абонентський сигналізатор випромінює тільки кодовий керуючий сигнал (відсутні вимірювальні сигнали абонентського сигналізатора, додаткові сигнали стаціонарного сигналізатора), а виміри роблять під час передачі кодового керуючого сигналу Підвищення точності визначення координат збільшується за рахунок того, що вимір проводять для кожного з імпульсів кодового керуючого сигналу з їх наступним усередненням Пристрій для визначення координат рухомих об'єктів, який реалізує відомий спосіб (патент Російської федерації RU 2106694 С1, G 08 В 25/00, 01 08 1995р), містить не менш одного абонентського сигналізатора, виконаного з можливістю установлення його на рухомому об'єкті і послідовному випромінюванні кодового керуючого сигналу у вигляді першої пари посилок модульованих синусоїдальних коливань із близькими частотами модуляції, не менш трьох базисних станцій, виконаних кожна з радіоприймальною частиною, вузлом перетворення сигналів, вузлом передачі сигналів, не менш однієї центральної станції, що містить обчислювальний блок, канал зв'язку, що з'єднує базисні і центральну станції, а також стаціонарний сигналізатор, виконаний з можливістю випромінювання другої пари посилок модульованих синусоїдальних коливань слідом за випромінюванням абонентським сигналізатором першої пари посилок модульованих синусоїдальних коливань з такими ж параметрами Вузол перетворення сигналів кожної базисної станції виконаний у вигляді вимірювального 56102 каналу, кодового каналу, контролера Вимірювальний канал містить змішувач, гетеродин, сигнал якого модулюють синусоїдальними коливаннями частотою, рівній напівсумі частот модуляції пар посилок і з можливістю виділення коливань низької частоти, рівної різниці частоти модуляції посилок вимірювального сигналу та частоти модуляції гетеродина вимірювального каналу, і підключений до виходу радіоприймальної частини Кодовий канал виконаний з можливістю пропущення адресних кодових сигналів і підключений до виходу радіоприймальної частини Контролер виконаний з можливістю дешифрацм керуючих кодових сигналів, з можливістю оцифровування результатів обробки сигналів шляхом виміру інтервалів часу між моментом виникнення дешифрованого кодового керуючого сигналу і моментами проходження через нуль синусоїд виділеною низькою різницевою частотою і підключений до виходів вимірювального і кодового каналів, і до каналу зв'язку з центральною станцією Центральна станція виконана з багатоканальним входом з числом каналів не менш числа базисних станцій, із блоком контролерів і обчислювальним блоком, а канали зв'язки виконані у вигляді провідних ЛІНІЙ або світлоносних ЛІНІЙ, чи радіоліній, чи комбінованих ЛІНІЙ Основний недолік відомого пристрою полягає в ускладненні устаткування, що входить до складу базисних станцій, введення спеціального вимірювального каналу, необхідності використання додаткових стаціонарних сигналізаторів, а також застосування великої КІЛЬКОСТІ каналів зв'язку між базисними станціями і центральною станцією, що приводить до збільшення часу визначення координат рухомих об'єктів Крім того, введення в процес виміру додаткового устаткування, переважно аналогового типу (модулятори і демодулятори у вимірювальному каналі), приводить до появи погрішностей визначення координат рухомих об'єктів, що виникають через неідентичність устаткування тому, що вимірам підлягають аналогові величини -вимірювальні сигнали абонентського і стаціонарного випромінювачів Задачею винаходу є удосконалення пристрою для визначення координат рухомих об'єктів, в якому шляхом спрощення схемного рішення досягається можливість виключити ряд приладів і зв'язків МІЖ НИМИ, ЧИМ досягається зменшення КІЛЬКОСТІ вимірів, наслідком чого є зменшення часу для вимірів, з одного боку, і усунення погрішностей при цьому, з другого боку Задача вирішується тим, що пристрій для визначення координат рухомих об'єктів, що складається з не менш ніж одного абонентського сигналізатора, встановленого на рухомому об'єкті, не менш ніж трьох базисних станцій з радіоприймальною частиною, розміщених у точках з відомими координатами, не менш ніж однієї центральної станції, розміщеної в точці з відомими координатами, ВІДПОВІДНО ДО винаходу, додатково обладнаний радіопередавачем, цифровою ЛІНІЄЮ затримки та пристроєм модифікації сигналів, при 6 цьому кожна з базисних станцій обладнана пристроєм регенерації сигналів, вхід якого з'єднаний з виходом радіоприймальної частини, а вихід - із входом цифрової лінії затримки, вихід якої з'єднаний із входом пристрою модифікації сигналів, вихід якого з'єднаний із входом радіопередавача, аналогічного абонентському сигналізатору, а центральна станція розміщена в точці з відомими координатами, обладнана одноканальною радіоприймальною частиною, вихід якої з'єднаний із входом пристрою регенерації сигналів, вихід якого з'єднаний із входом пристрою виміру часових інтервалів, вихід якого з'єднаний із входом обчислювального блоку Запропонований пристрій дозволяє 1 виключити багаторазові вимірювання на базисних станціях, 2 використати для роботи пристрою 1-ий радіоканал незалежно від довжини охоронюваної території за рахунок примусового розподілу сигналів по часу отримання від базисних станцій, що виникає через використання фіксованих затримок у базисних станціях, 3 передача кодового вимірювального сигналу і кодового адресного сигналу кожної з базисних станцій на центральну станцію в цифровому виді, що дозволяє зберегти всі тимчасові співвідношення між сигналами з наступною корекцією на центральній станції при визначенні координат Суть винаходу пояснюється кресленням, де наведені На Фіг 1 - Структурна схема пристрою, який реалізує запропонований спосіб визначення координат рухомих об'єктів На Фіг 2 - Структурна схема абонентського сигналізатора На Фіг 3 - Структурна схема базисної станції На Фіг 4 - Структурна схема центральної станції Реалізація способу здійснюється пристроєм, схема якого включає абонентський сигналізатор 1, базисні станції 2, центральну станцію 3 (див Фіг 1) При цьому схема абонентського сигналізатора (див Фіг 2) включає формуватель модулюючого сигналу 4, модулятор 5, ЧМ генератор 6, підсилювач потужності 7 і антену 8 Схема базисної станції (див Фіг 3) включає радіоприймальну частину 9, пристрій регенерації 10, цифрову ЛІНІЮ затримки 11, пристрій модифікації сигналів 12, частину для радіопередачі 13 Схема центральної станції (див Фіг 4) включає радіоприймальну частину 14, пристрій регенерації радіосигналів 15, пристрій виміру тимчасових інтервалів 16, обчислювальний блок 17 ВІДПОВІДНО ДО винаходу, при несанкціонованому доступі до рухомого об'єкта формуватель модулюючого сигналу 4 (Фіг 2) формує послідовно кодовий керуючий сигнал, що представляє чергування логічних «0» і «1» та кодовий адресний сигнал Модулятор 5 (Фіг 2) впливає на ЧМ генератор 6 (Фіг 2) і змінює його частоту ВІДПОВІДНО до зміни сигналу, що модулює ЧМ коливання підсилюються в підсилювачі потужності 7 (Фіг 2) до необхідного рівня і за 56102 допомогою антени 8 (Фіг 2) випромінюються в ефір Ці сигнали приймаються радіоприймальною частиною 9 (Фіг 3) базисних станцій 2, у зоні дії яких знаходиться абонентський сигналізатор 1 Прийняті сигнали надходять на пристрій регенерації 10 (Фіг 3) радіосигналів, де перетворюються до цифрового вигляду (ТТЛ рівню) Перетворені сигнали надходять на цифрову ЛІНІЮ затримки 11 (ФігЗ), що затримує перетворені' сигнали на фіксований, індивідуальний для кожної з базисних станцій час, після чого затримані сигнали доповнюються кодовим адресним сигналом базисної станції 2 в пристрої модифікації сигналів 12 (Фіг 3) і перевипромінюються зі збереженням усіх тимчасових співвідношень радюпередаючої частиною 13 (Фіг 3), аналогічної абонентському сигналізатору 1 Сигнали, перевипроменені базисними станціями 2, приймаються радіоприймальною частиною 14 (Фіг 4) центральної станції З Продетектовані радіоприймальною частиною сигнали базисних станцій 2 надходять на пристрій регенерації радіосигналів 15 (Фіг 4) Перетворені до цифрового вигляду (ТТЛ рівню) сигнали базисних станцій 2 надходять на пристрій виміру тимчасових інтервалів 16 (Фіг 4), де виміри роблять під час перевипромінювання кодових керуючих сигналів Розглянемо тимчасові співвідношення в системі, використовувані для визначення координат джерела тривоги (для трьох базисних станцій) Нехай to - часу спрацьовування сторожового пристрою й ініціалізації передавача абонентського сигналізатора 1 (Фіг 1) Тоді =t. С U=t, U=tr С Де ti, t2, t3 - час надходження сигналів від передавача абонентського сигналізатора 1 на кожну з трьох базисних станцій 2, П, Г2, гз - невідомі відстані від передавача абонентського сигналізатора 1 до кожної з трьох базисних станцій 2, С - швидкість світла На кожній із трьох базисних станцій 2 сигнали доповнюються адресним сигналом базисної станції і з затримкою %•] Х2 хз і, ВІДПОВІДНО перевипромінюються на центральну станцію З Отже, центральна станція 3 одержує сигнали від абонентського сигналізатора 1, перевипроменені 8 трьома базисними станціями 2 в різний час, а саме = tn+Xn R i + х1 с T,=t, = t. +х С = to +X R2 С R3 с Де Ті, І2, Тз - час надходження сигналів від трьох базисних станцій, хі, Х2, хз - фіксовані апаратні затримки, індивідуальні для кожної базисної станції, R-i, R2, R3 - відома відстань між базисними станціями і центральною станцією, с - швидкість світла У схему виміру тимчасових затримок включаються поточні значення Т-і, Тг, Тз, причому маркерним сигналом є сигнал з часом затримки Т-і, а потім порівнюються Т2-Т1, T3-T2 -тобто затримки (а не поточний час) Т2-Т1, T3-T2 Але, тому що Ri, R2, R3 - заздалегідь ВІДОМІ, а хі, Х2, хз - фіксовані затримки, встановлюються апаратно, де можливий ПереХІД ДО ВИМіру t2-t|, ts-b, ПРОПОРЦІЙНИХ Г2-Г-І, ГзГ2 Таким чином, можна визначити різниці відстаней Г2-Г-І, Г - 2 Отже, виміри невідомих 3Г відстаней г-і, Г2, гз (тому що to - випадкова величина), замінюються виміром різниці відстаней Г2-П, Г3-Г2, що цілком достатньо для однозначного визначення координат рухомого об'єкта Використання пропонованого способу визначення координат рухомих об'єктів з пристроєм для його реалізації дозволить • скоротити час визначення координат рухомих об'єктів за рахунок того, що виміри почасових інтервалів робляться однократно під час передачі кодового керуючого сигналу, тобто виміри роблять по кожному символу керуючого сигналу з наступним їхнім усередненням, • спростити технічну реалізацію способу визначення координат рухомих об'єктів за рахунок виключення вимірювальних каналів у базисних станціях і додаткових стаціонарних сигналізаторів, • зменшити погрішність визначення координат за рахунок того, що вимірам піддають цифрові величини, що дозволяє при кінцевій обробці коректувати їх значення, компенсуючи неідентичність аналогових частин прототипу, крайових викривлених імпульсів і т д 10 56102 5 ФІГ.1 11 6 Фіг.2 12 15 14 16 Фіг.4 ФІГ.З Підписано до друку 05 05 2003 р Тираж 39 прим ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)236-47-24 17
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determining coordinates of a movable object and the device for realization of the method
Назва патенту російськоюСпособ определения координат подвижного объекта и устройство для осуществления способа
МПК / Мітки
МПК: G08B 25/00
Мітки: здійснення, об'єктів, визначення, пристрій, координат, рухомих, спосіб
Код посилання
<a href="https://ua.patents.su/5-56102-sposib-viznachennya-koordinat-rukhomikh-obehktiv-i-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення координат рухомих об’єктів і пристрій для його здійснення</a>
Спосіб точної синхронізації рухів рухомих елементів преса (варіанти) та пристрій для його здійснення
Номер патенту: 49842
Опубліковано: 15.10.2002
Автор: Хавлас Мартін
МПК: A01F 15/00, A01F 12/00
Мітки: рухів, точної, преса, пристрій, варіанти, синхронізації, спосіб, елементів, рухомих, здійснення
Формула / Реферат:
1. Спосіб точної синхронізації рухів рухомих елементів преса для формування великих пак, особливо синхронізації введення обв'язувальних голок і управління механізмом подачі пресованої маси, що полягає у тому, що від головної передачі приводять вал вузлов'язів і щонайменше одну кутову передачу, при цьому приведення обв'язувальних голок здійснюють від вала вузлов'язів, а механізм подачі пресованої маси приводять від головної передачі, який...
Спосіб визначення споживання енергії у колах змінного струму і пристрій для його здійснення
Номер патенту: 28106
Опубліковано: 16.10.2000
Автори: Лісняк Олександр Григорович, Войцешко Юрій Васильович, Клісенко Сергій Володимирович, Заславський Олександр Михайлович, Ружніков Євген Володимирович, Кліменко Володимир Миколайович, Ганопольський Михайло Ісакович
МПК: G01R 21/06
Мітки: енергії, спосіб, струму, споживання, пристрій, здійснення, визначення, колах, змінного
Формула / Реферат:
1. Спосіб визначення споживання енергії у колах змінного струму, який включає почергову вибірку через задані інтервали часу миттєвих значень струму і напруги у колі, перетворення вибірок у цифрові сигнали, пропорційні вибраним значенням, запам'ятовування отриманих цифрових сигналів, обчислення миттєвих значень потужності з наступним усередненням протягом заданого інтервалу часу, який відрізняється тим, що послідовність вибірки миттєвих...
Спосіб визначення малих радіальних швидкостей в когерентних рлс і пристрій для його здійснення
Номер патенту: 54301
Опубліковано: 17.02.2003
Автори: Пуляєв Валерій Олександрович, Рогожкін Євген Васильович, Лізогуб Віталій Васильович
МПК: G01S 13/95
Мітки: визначення, здійснення, когерентних, радіальних, рлс, спосіб, пристрій, малих, швидкостей
Формула / Реферат:
1. Спосіб визначення малих радіальних швидкостей в імпульсних когерентних РЛС зі спільною приймально-передавальною антеною, що включає випромінювання строго в одній фазі радіохвилі, прийом відбитого від об'єкта сигналу з переносом його на проміжну частоту, вимірювання фазового зсуву відбитого сигналу відносно зондуючого і обчислення радіальної швидкості по приросту фазового зсуву за інтервал часу, що дорівнює періоду повторення зондуючих...
Спосіб діагностики судинних порушень в уражених хребетно-рухомих сегментах та пристрій для його здійснення
Номер патенту: 6871
Опубліковано: 31.03.1995
Автори: Колесник Петро Федорович, Павлов Сергій Володимирович, Чепорнюк Сергій Володимирович, Кожем'яко Володимир Прокопович, Марков Сергій Михайлович, Коротко Олександр Шиманович
МПК: A61B 5/02
Мітки: здійснення, сегментах, судинних, хребетно-рухомих, спосіб, порушень, уражених, діагностики, пристрій
Формула / Реферат:
1. Способ диагностики сосудистых нарушений в пораженных позвоночно-двигательных сегментах, основанный на регистрации пульсовой волны в области позвоночника, преобразовании ее в электрический сигнал, определении кровенаполнения как отношения максимального значения амплитуды сигнала ко времени анакроты, определяемого по изолинии от начала анакроты до проекции ее вершины, отличающийся тем, что кровенаполнение определяют фотометрической...
Спосіб виявлення та визначення електромагнітного випромінювання від біологічних об’єктів та пристрій для його здійснення
Номер патенту: 28128
Опубліковано: 16.10.2000
Автори: Скрипник Юрій Олексійович, Яненко Олексій Пилипович
МПК: G01N 33/483
Мітки: визначення, об'єктів, виявлення, електромагнітного, пристрій, спосіб, випромінювання, біологічних, здійснення
Формула / Реферат:
1. Спосіб виявлення та визначення електромагнітного випромінювання від біологічних об'єктів, при якому опромінюють зондуючим монохроматичним сигналом активні ділянки поверхні біооб'єкту, наприклад, біологічно активні точки шкіри людини або тварини, приймають відбитий сигнал, виділяють з нього сигнал вторинного випромінювання об'єкта на одній із комбінаційних частот, які виникають від змішування опромінюючого сигналу та гармонік сигналу...
Попередній патент: Програмно-апаратне робоче місце для діагностики та ремонту радіоелектронних пристроїв “парм”
Наступний патент: Спосіб лікування менорагії у жінок з фіброміомою матки та ендометріозом
Випадковий патент: Спосіб вибухозахисту при експлуатації систем транспортування газів