Сенсор кутової швидкості
Номер патенту: 57333
Опубліковано: 16.06.2003
Автори: Войтович Олеся Петрівна, Кучерук Володимир Юрійович, Кулаков Павло Ігоревич, Поджаренко Володимир Олександрович
Формула / Реферат
Сенсор кутової швидкості, що містить вал, зв'язаний з модулятором, який має форму диска з прорізом спеціальної форми, джерело світла, розташоване перед модулятором, два лінійних фотоприймачі, зсунутих між собою відносно центра модулятора на кут, рівний 180°, діафрагму, встановлену перед першим лінійним фотоприймачем і другим лінійним фотоприймачем, яка має прорізи, форми яких обмежені двома променями, які починаються в центрі модулятора, модулятор світлового потоку має проріз, конфігурація якого обмежена двома кривими, які описуються рівняннями в полярних координатах, вісь яких проходить через центр модулятора світлового потоку, початок координат яких співпадає з центром модулятора світлового потоку, ρ1(φ) = Ro, ρ2(φ) = ![]() де φ - кутова координата відносно осі, Rо - константа, яка є радіусом окружності, що є функцією ρ1(φ), а - константа, яка визначає максимальну ширину прорізу, аналоговий комутатор, який відрізняється тим, що в нього введені матриця аналогових компараторів, мікроконтролерний пристрій, причому виходи матриці аналогових компараторів з'єднані з мікроконтролерним пристроєм, вихід якого з'єднаний з адресним входом аналогового комутатора, інформаційні входи якого приєднані до виходів фотоприймачів, вихід аналогового комутатора з'єднаний з входами матриці аналогових компараторів, інші входи якої під'єднані до джерел опорної напруги.
де φ - кутова координата відносно осі, Rо - константа, яка є радіусом окружності, що є функцією ρ1(φ), а - константа, яка визначає максимальну ширину прорізу, аналоговий комутатор, який відрізняється тим, що в нього введені матриця аналогових компараторів, мікроконтролерний пристрій, причому виходи матриці аналогових компараторів з'єднані з мікроконтролерним пристроєм, вихід якого з'єднаний з адресним входом аналогового комутатора, інформаційні входи якого приєднані до виходів фотоприймачів, вихід аналогового комутатора з'єднаний з входами матриці аналогових компараторів, інші входи якої під'єднані до джерел опорної напруги.
Текст
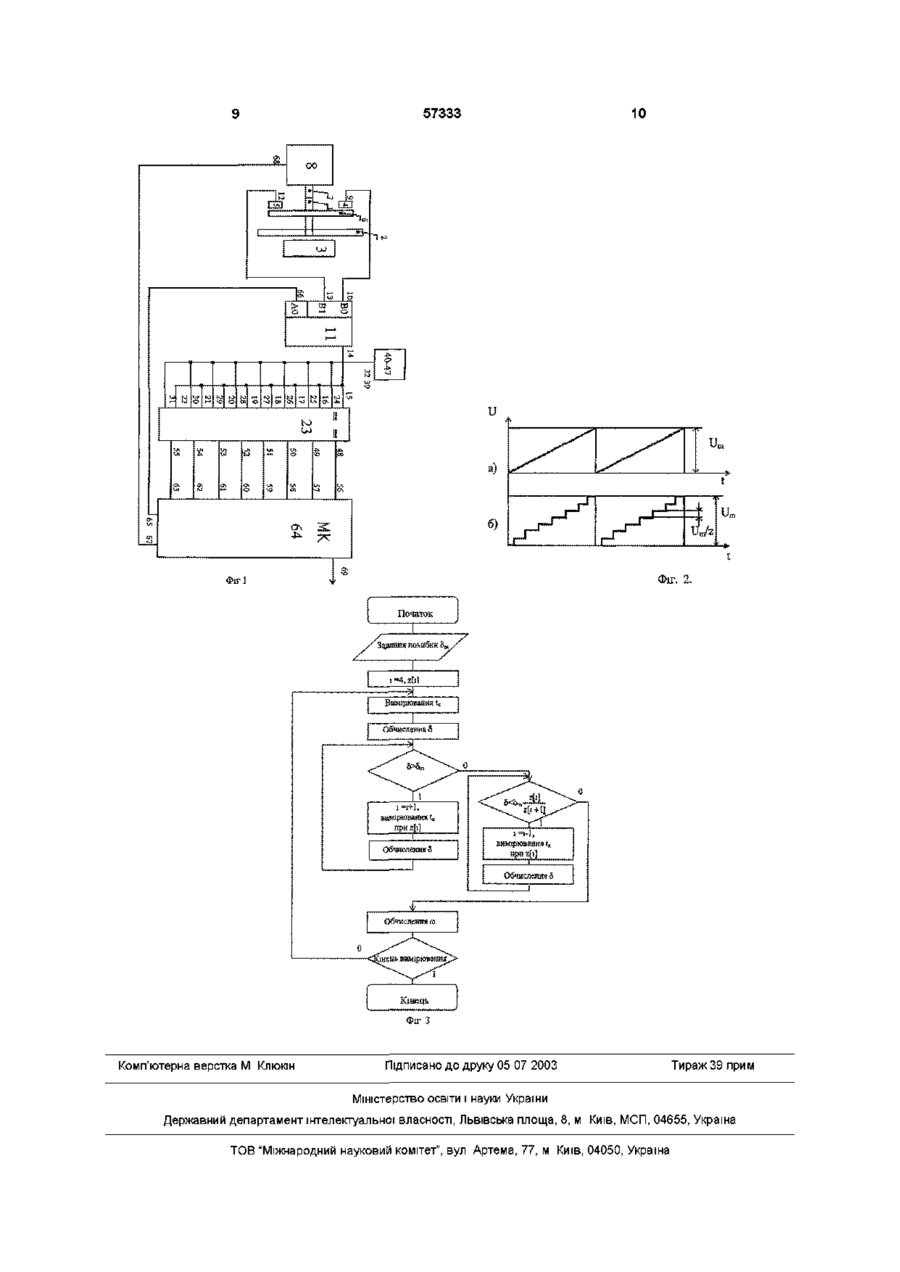
Сенсор кутової швидкості, що містить вал, зв'язаний з модулятором, який має форму диска з прорізом спеціальної форми, джерело світла, розташоване перед модулятором, два ЛІНІЙНИХ фотоприймачі, зсунутих між собою відносно центра модулятора на кут, рівний 180°, діафрагму, встановлену перед першим ЛІНІЙНИМ фотоприймачем і другим ЛІНІЙНИМ фотоприймачем, яка має прорізи, форми яких обмежені двома променями, які починаються в центрі модулятора, модулятор світлового потоку має проріз, конфігурація якого обмежена двома кривими, які описуються рівняннями в полярних координатах, вісь яких проходить через центр модулятора світлового потоку, початок координат яких співпадає з центром модулятора світлового потоку, рі(ср) = Ro, р2((р) = Ф кутова координата • о т аФ> відносно осі, Ro - константа, яка є радіусом окружності, що є функцією рі(ф), а - константа, яка визначає максимальну ширину прорізу, аналоговий комутатор, який відрізняється тим, що в нього введені матриця аналогових компараторів, мікроконтролерний пристрій, причому виходи матриці аналогових компараторів з'єднані з мікроконтролерним пристроєм, вихід якого з'єднаний з адресним входом аналогового комутатора, інформаційні входи якого приєднані до виходів фотоприймачів, вихід аналогового комутатора з'єднаний з входами матриці аналогових Винахід відноситься до вимірювальної техніки і може бути використаний в процесі випробувань електромеханічних перетворювачів енергії Відомий сенсор кутової швидкості, що має вал, модулятор світлового потоку у вигляді диска, зв'язаний з валом, джерело світла, розташоване перед модулятором, ЛІНІЙНИЙ фотоприймач, розташований навпроти джерела світла по інший бік модулятора, діафрагму, встановлену перед ЛІНІЙНИМ фотоприймачем, що має форму трапеції При обертанні модулятора відбувається зміна світлового потоку, що падає через елементи модулятора та діафрагму на фоточутливий шар фотоприймача На виході ЛІНІЙНОГО фотоприймача формуються трикутні імпульси напруги, крутизна фронтів яких прямо пропорційна кутовій швидкості обертання [Авт св №62226, кл G01P15/00, 1940] ча обмежена, то при певній частоті обертання похибка первинного перетворювача кутової швидкості обертання в крутизну фронтів трикутних імпульсів напруги суттєво збільшується внаслідок завалу амплітудно-частотної характеристики фотоприймача Чим більше число прозорих елементів модулятора, тим вище частота слідування вихідних трикутних імпульсів фотоприймача, і тим менша верхня межа вимірювання Відомий аналоговий сенсор кутової швидкості, що має вал, модулятор світлового потоку у вигляді диска, який зв'язаний з валом, джерело світла, розташоване перед модулятором, ЛІНІЙНИЙ фотоприймач, розташований навпроти джерела світла по іншу сторону модулятора, діафрагму, встановлену перед ЛІНІЙНИМ фотоприймачем, що має проріз, форма якого обмежена двома променями, які починаються в центрі модулятора світлового потоку, модулятор світлового потоку має проріз, конфігурація якого обмежена двома кривими, які описуються рівняннями в полярних координатах, вісь яких проходить через центр модулятора світлового потоку, початок координат яких співпадає з центром модулятора світлового потоку При обер Недоліком аналога є обмеження верхньої межі вимірювань кутової швидкості Обмеження межі вимірювань зумовлене тим, що частота вихідних імпульсів фотоприймача сенсора дорівнює добутку числа прозорих елементів модулятора на частоту обертання модулятора У зв'язку з тим, що смуга пропускання фотоприйма компараторів, ІНШІ ВХОДИ якої під'єднані до джерел опорної напруги CO го го 1^ ю 57333 танні модулятора формується тільки один імпульс пилкоподібної напруги за один поворот валу, швидкість вимірювання переднього фронту якого прямо пропорційна кутовій швидкості обертання Тобто кутова швидкість обертання прямо пропорційна першій ПОХІДНІЙ вихідного сигналу [Пат України №22701, кл G01P3/44, 1998, Бюл №3] Недоліком аналога є складність обробки сигналу, що приводить до втрати корисного сигналу, а отже, зменшення точності Недолік зумовлений тим, що сенсор працює лише в діапазоні кутів повороту модулятора відносно діафрагми в межах від 0 до 2тт-а При кутах повороту в межах від 2тт-а до 2тт формується задній фронт вихідної пилкоподібної напруги Довжина цього фронту залежить від величини кута а кутової ширини отвору діафрагми Чим більше кут а, тим більша тривалість цього фронту Перша похідна вихідного сигналу на цій ДІЛЯНЦІ ЗМІНЮЄ СВІЙ знак на протилежний, що значно ускладнює подальшу обробку сигналу Найбільш близьким за технічними характеристиками є сенсор кутової швидкості для динамічних вимірювань, якій складається з валу, що зв'язаний з модулятором, який має форму диска з прорізом спеціальної форми Джерело світла, розташоване перед модулятором, навпроти двох ЛІНІЙНИХ фотоприймачів, зсунутих між собою відносно центра модулятора на кут рівний 180° Діафрагма, встановлена перед першим ЛІНІЙНИМ фотоприймачем та другим ЛІНІЙНИМ фотоприймачем, яка має прорізи, форми яких обмежені двома променями, які починаються в центрі модулятора Модулятор світлового потоку має проріз, конфігурація якого обмежена двома кривими, які описуються рівняннями в полярних координатах, вісь яких проходить через центр модулятора світлового потоку, початок координат яких співпадає з центром модулятоpa СВІТЛОВОГО ПОТОКУ, ^wr/ и, rz\-r/ де ф - кутова координата відносно ВІСІ, RO - константа, яка є радіусом окружності, що є функцією Рі(ф), а - константа, яка визначає максимальну ширину прорізу Плата, на якій розміщені два фотоприймачі, два компаратори напруги, виходи яких приєднані до входів логічного елемента АБО Його вихід приєднано до тактового входу лічильного тригера, прямий вихід якого з'єднаний до адресного входу аналогового комутатора Виходи першого та другого ЛІНІЙНИХ фотоприймачів приєднані до сигнальних входів аналогового комутатора і до прямих входів компараторів напруги, формувач сигналу "Скидання", вихід якого приєднаний до входу скидання лічильного тригера і до входу пристрою запуску об'єкта вимірювання, вихід якого приєднаний до входу джерела опорної напруги, вихід якого приєднаний до інверсних входів компараторів Для неприривного отримання вимірювальної інформації відбувається послідовне підключення до виходу сенсора вихідної напруги того ЛІНІЙНОГО фотоприймача, вихідний сигнал якого у ВІДПОВІДНИЙ момент часу є інформативним, тобто не формується його задній фронт При обертанні валу на виході сенсора кутової швидкості формується сигнал пилкоподібної форми, крутизна переднього фронту якого прямо пропорційна миттє вій кутовій швидкості Частота цього сигналу ВДВІЧІ більша частоти обертання валу [Пат України №24374, кл G01P3/44, 1998, Бюл №5] Недоліком прототипу є обмеження верхньої межі вимірювання Обмеження верхньої межі вимірювання зумовлено частотою роботи аналогово-цифрового перетворювача для подальшої передачі та обробки за допомогою мікропроцесорної техніки При вісьмирозрядному АЦП, з часом реагування пристрою вибірки зберігання 20 не, максимальна кутова швидкість, що може вимірювати даний сенсор становить приблизно 15тис об/хв В основу винаходу поставлена задача створення сенсора кутової швидкості, в якому за рахунок введення нових елементів та нових зв'язків досягається збільшення верхньої межі вимірювання, за рахунок збільшення швидкодії сенсора Поставлена задача вирішується тим, що в сенсор кутової швидкості, який складається з валу, що зв'язаний з модулятором, який має форму диска з прорізом спеціальної форми, джерела світла, розташованого перед модулятором, двох ЛІНІЙНИХ фотоприймача, зсунутих між собою відносно центра модулятора на кут рівний 180°, діафрагми, встановленої перед першим ЛІНІЙНИМ фотоприймачем та другим ЛІНІЙНИМ фотоприймачем, яка має прорізи, форми яких обмежені двома променями, які починаються в центрі модулятора, модулятор світлового потоку має проріз, конфігурація якого обмежена двома кривими, що описуються рівняннями в полярних координатах, вісь яких проходить через центр модулятора світлового потоку, початок координат яких співпадає з центром модулятора світлового потоку, P i M = Rn Р?(Ф) = \ Rn +эф, І-І\Т/ и, rz\-n v и т> д Є ф . кутова координата відносно осі, Ro - константа, яка є радіусом окружності, що є функцією рі(ф), а - константа, яка визначає максимальну ширину прорізу, в якому згідно винаходу введені матриця аналогових компараторів, мікроконтролерний пристрій, причому виходи матриці аналогових компараторів з'єднані з мікроконтролерним пристроєм, вихід якого з'єднаний з адресним входом аналогового комутатора, інформаційні входи якого приєднані до виходів фотоприймачів, вихід аналогового комутатора з'єднаний з входами матриці аналогових компараторів, ІНШІ входи якої під'єднані до джерел опорної напруги На фіг 1 представлена структурна схема сенсора кутової швидкості на фіг 2 - часові діаграми, на фіг 3 - алгоритм програми регулювання похибки Сенсор кутової швидкості складається з валу 1 (фиг 1), який зв'язаний з модулятором 2, що має форму диска з прорізом спеціальної форми Напроти прорізу перед модулятором 2 розташовано джерело світла 3 Навпроти джерела світла 3 розташовані перший ЛІНІЙНИЙ фотоприймач 4 та другий ЛІНІЙНИЙ фотоприймач 5 Діафрагма 6, встановлена перед першим ЛІНІЙНИМ фотоприймачем 4 та другим ЛІНІЙНИМ фотоприймачем 5 Вал 7 об'єкта вимірювання 8 сполучається з валом 1 сенсора кутової швидкості Вихід 9 першого фотоприймача 4 з'єднаний з першим аналоговим входом 10 ана 57333 логового комутатора 11, вихід 12 другого ЛІНІЙНОГО фотоприймача 5 з'єднаний з другим аналоговим входом 13 аналогового комутатора 11 Аналоговий вихід 14 аналогового комутатора 11 з'єднаний з входами 15 - 22 матриці аналогових компараторів 23 ІНШІ входи 24 - 31 приєднані до виходу 32 - 39 джерел опорної напруги 40 - 47, які призначені для подачі різної опорної напруги Виходи 48 - 55 матриці аналогових компараторів 23 з'єднані з аналоговими входами 56 - 63 мікроконтролерного пристрою 64 На фіг 1 показана матриця аналогових компараторів 23, що складається з восьми компараторів, але в загальному випадку КІЛЬКІСТЬ компараторів, а отже, і інформаційних входів мікропроцесора 64 виходів 32 - 39 джерел опорної напруги 40 - 47 може бути іншою Вихід 65 мікроконтролера 64 з'єднаний з адресним входом 66 аналогового комутатора 11 Вихід 67 мікроконтролера 64 приєднаний до входу живлення 68 об'єкта вимірювання 8 Вихід 69 мікроконтролера 64 є виходом сенсора кутової швидкості Сенсор кутової швидкості працює наступним чином В момент початку вимірювання на виході 65 мікроконтролера 64 формується адреса першого входу 10 аналогового комутатора 11, на виході 67 мікроконтролера формується сигнал, який поступає на вхід живлення 68 об'єкта вимірювання 8, що призводить до його запуску Вал 7 об'єкта вимірювання 8 починає обертатись і напруга U (фіг 2 а) на виході першого ЛІНІЙНОГО фотоприймача 4 починає збільшуватись Ця напруга через вихід 14 аналогового компаратора 11 поступає на входи 1 5 - 2 2 матриці аналогових компараторів 23, де порівнюється з поданими на входи 24 - 31 матриці аналогових компараторів 23 вихідними напругами джерел опорної напруги 40 - 47 Значення опорної напруги, яка подається на входи 24 - 31 матриці аналогових компараторів 23 иоп=-^, О) де і =1 8 - номер входа 24 - 31 матриці аналогових компараторів 23, U m - максимальна напруга на виході 9 першого ЛІНІЙНОГО фотоприймача 4 та на виході 12 другого ЛІНІЙНОГО фотоприймача 5, z КІЛЬКІСТЬ інформаційних входів матриці аналогових компараторів 23 Коли напруга U перевищує величину напруги виходу 24 джерела опорної напруги 32, то на виході 48 формується логічна одиниці, яка поступає на вхід 56 мікроконтролера 64 Коли напруга U перевищує величину напруги виходу 25 джерела опорної напруги 33, то на виході 49 формується логічна одиниця, яка поступає на вхід 57 мікроконтролера 64, і так далі Таким чином формується східчастий сигнал (фіг 26 ) Коли на виході 55 матриці аналогових компараторів 23 з'являється сигнал логічної одиниці і поступає на вхід 63 мікроконтролера 64, то на виході 65 мікроконтролера 64 формується адреса другого входу 13 аналогового комутатора 11 і поступає на адресний вхід 66 аналогового комутатора 11 Таким чином до виходу 14 аналогового комутатора 11 підключається вихід 12 другого фотоприймача 5 Процес повторюється циклічно, поки на виході 55 матриці аналогових компараторів 23 з'являється сигнал логічної одиниці Таким чином на входах мікроконтролера фо рмується ПОСЛІДОВНІСТЬ імпульсів, яка відповідає переходам з рівня логічного нуля на рівень логічної ОДИНИЦІ Вимірювання кутової швидкості обертання відбувається наступним чином При обертанні валу 1 обертається модулятор 2 Вихідна напруга першого ЛІНІЙНОГО фотоприймач 4 та другого ЛІНІЙНОГО фотоприймача 5 прямо пропорційна світловому потоку, що падає на його фоточутливий шар, який прямо пропорційний площі отвору, через який світло попадає на його фоточутливий шар Модулятор 2 має проріз спеціальної форми, форма якої обмежена кривими, які описуються рівняннями в полярних координатах, вісь яких проходить через центр модулятора 2 світлового потоку, початок координат яких співпадає з центром модулятора 2 світлового потоку, (2) (3) де ф - кутова координата відносно ВІСІ, RO константа, яка є радіусом окружності, що є функцією рі(ф), а - константа, яка визначає максимальну ширину прорізу Залежність площі, через яку світло потрапляє на фоточутливий шар першого ЛІНІЙНОГО фотоприймача 4, від кута повороту визначається наступним чином ііі+В s ЦЯ-З г> г>2 = 2 J (Р2(ф)-Р?(ф)):|Ф=2 J фс!ф = а ^ ф + а ^ (4) де S - площа отвору, через який світло потрапляє на фоточутливий шар першого ЛІНІЙНОГО фотоприймача 4, ф - кут повороту модулятора 2 відносно краю нерухомої діафрагми 6, р - кут між променями діафрагми 6 Таким чином при вищевказаній формі кривих, які обмежують проріз модулятора 2, площа отвору, через який світло потрапляє на фоточутливий шар першого ЛІНІЙНОГО фотоприймача 4, ЛІНІЙНО залежить від кута повороту модулятора 2 відносно краю нерухомої діафрагми 6 Так як світловий потік прямо пропорційний площині отвору, а вихідна напруга першого ЛІНІЙНОГО фотоприймача 4 прямо пропорційна світловому потоку, то вихідна напруга першого ЛІНІЙНОГО фотоприймача 4 ЛІНІЙНО залежить від кута повороту модулятора 2 Кут повороту та кутова швидкість пов'язані наступним співвідношенням ,., du/ kdU ,,_. o o ( t ) = — Ї d = t ( d 5 ) t де ш - кутова швидкість обертання, t - час, k коефіцієнт пропорційності, U - вихідна напруга першого ЛІНІЙНОГО фотоприймача 4 Так як вихідна напруга першого фотоприймача 4 вимірюється лише на половині кута обертання, а потім квантується, то кутова швидкість буде обчислюватись за формулою ш (6) t t де ф - кут повороту модулятора 2, який відпоо відає мінімальній напрузі спрацювання матриці аналогових компараторів 23, t x - час, за який здійснюється цей поворот, z - КІЛЬКІСТЬ інформаційних виходів матриці аналогових компараторів 23 57333 Час tx, за який здійснюється поворот на кут фо, тобто час, між появою рівнів логічної одиниці на двох сусідніх входах 56 - 63 мікропроцесора 64 вимірюється засобами мікропроцесора 64 Похибка сенсору кутової швидкості обчислюється за формулою 5 = — t x -100% U) звідки слідує, що регулювати похибку можна за допомогою зміни часу t x Цього можна досягти змінюючи КІЛЬКІСТЬ інформативних входів мікропроцесора 64, тобто зчитування інформації проводиться лише з тих входів мікропроцесора 64, які задаються програмно Це відбувається наступним чином Задається значення похибки, з яким має відбуватись вимірювання кутової швидкості На виході 67 мікропроцесора 64 формується сигнал запуску об'єкту 8 Вал починає обертатись Напруга, що формується на виході першого ЛІНІЙНОГО фотоприймача 4 через аналоговий комутатор поступає на входи 15-22 матриці аналогових компараторів 23, на її виходах 48 - 55 формуються рівні логічних одиниць, які поступають на входи 56-63 мікропроцесора 64 Вимірюючи час tx, за який здійснюється поворот на кут фо, тобто час, між появою рівнів логічної одиниці на двох сусідніх входах мікропроцесора 64, програмне обчислюється похибка 5 (7), якщо вона менше заданої, то КІЛЬКІСТЬ інформаційних входів z зменшується, якщо похибка більше заданої, то КІЛЬКІСТЬ входів z, з яких зчитується інформація збільшується Алгоритм процедури регулювання похибки, показаний на фіг 3, працює наступним чином Задається максимальне значення похибки 5 т , з яким має відбуватись вимірювання кутової швидкості Задається КІЛЬКІСТЬ інформаційних входів z[i], мікропроцесора 64 При цьому необхідно враховувати, що зчитування повинно відбуватись 8 з рівновіддалених один від одного входів, для того, щоб кут ф залишався однаковим на всіх інтервао лах Тому КІЛЬКІСТЬ можливих інформаційних входів z задається програмне, виходячи з апаратної КІЛЬКОСТІ входів матриці аналогових компараторів 23 Так як КІЛЬКІСТЬ інформаційних входів z[i] змінюється не рівномірно, то значення кутової швидкості ш обчислюється в інтервалі похибки 5 від z[l] я °т~Г—тг Z L I + I J до 5m Вимірюється час tx, за який здійснюється поворот на кут фо, тобто час, між появою рівнів логічної одиниці на двох сусідніх входах мікропроцесора 64, програмне обчислюється похибка 5 (7) Перевіряється умова чи 5 > 5 т , якщо так, то КІЛЬКІСТЬ інформаційних входів z[i] збільшується до z[i + 1] Знову проводиться вимірювання часу t x та обчислюється 5, і перевіряється умова Якщо умова не виконується, то перевіряється наступна умо m г лґ Z I+ ва L 'J якщо так, то КІЛЬКІСТЬ інформаційних входів z[i] зменшується до z[i - 1] Знову проводиться вимірювання часу t x та обчислюється 5, і перевіряється умова Якщо умова не виконується, обчислюється значення кутової швидкості ш (6) Процес повторюється поки не закінчиться вимірювання При такому регулюванні при кутовій швидкості обертання ш = 2Огис об/хв КІЛЬКІСТЬ інформаційних входів z буде дорівнювати одиниці, отже, при одному оберті вала буде формуватись лише два імпульси, час t x буде дорівнювати 5,2мкс, тому часові характеристики апаратної частини не будуть обмежувати верхню межу вимірювання Верхня межа вимірювання сенсора кутової швидкості обмежена лише механічними характеристиками об'єкта вимірювання 10 57333 L ES > 0 C 3 O U ь t L ФІГ. 2. Комп'ютерна верстка М Клюкш Підписано до друку 05 07 2003 Тираж39 прим Міністерство освіти і науки України Державний департамент інтелектуальної власності, Львівська площа, 8, м Київ, МСП, 04655, Україна ТОВ "Міжнародний науковий комітет", вул Артема, 77, м Київ, 04050, Україна
ДивитисяДодаткова інформація
Назва патенту англійськоюAngular speed transducer
Автори англійськоюPodzharenko Volodymyr Oleksandrovych, Kulakov Pavlo Ihorovych, Kucheruk Volodymyr Yuriiovych
Назва патенту російськоюДатчик угловой скорости
Автори російськоюПоджаренко Владимир Александрович, Кулаков Павел Игоревич, Кучерук Владимир Юрьевич
МПК / Мітки
МПК: G01P 3/42
Мітки: кутової, швидкості, сенсор
Код посилання
<a href="https://ua.patents.su/5-57333-sensor-kutovo-shvidkosti.html" target="_blank" rel="follow" title="База патентів України">Сенсор кутової швидкості</a>
Пристрій для вимірювання кутової швидкості
Номер патенту: 55791
Опубліковано: 15.04.2003
Автори: Білинська Марина Йосипівна, Кухарчук Василь Васильович
МПК: G01P 3/36
Мітки: швидкості, кутової, пристрій, вимірювання
Формула / Реферат:
Пристрій для вимірювання кутової швидкості, що містить освітлювач, об'єктив, багатоелементний фотоприймальний пристрій, який відрізняється тим, що в нього введена багатогранна насадка на контрольований вал, виконана у вигляді правильного багатогранника, обчислювальний пристрій, при цьому освітлювач виконаний у вигляді імпульсного лазера, а багатоелементний фотоприймальний пристрій виконаний у вигляді матриці світлочутливих елементів, оптичний...
Пристрій для вимірювання кутової швидкості та прискорення
Номер патенту: 56722
Опубліковано: 15.05.2003
Автори: Білинська Марина Йосипівна, Кухарчук Василь Васильович, Білинський Йосип Йосипович
МПК: G01C 19/00, G01P 3/36
Мітки: прискорення, кутової, швидкості, пристрій, вимірювання
Формула / Реферат:
Пристрій для вимірювання кутової швидкості та кутового прискорення, який містить освітлювач, контрольований вал, об'єктив, оптично зв'язаний з входом багатоелементного фотоприймального пристрою, який відрізняється тим, що в нього введена насадка на контрольованому валу, виконана у вигляді Архімедової спіралі, оптично зв'язана з освітлювачем, що являє собою напівпровідниковий лазер, об'єктивом і обчислювальним пристроєм, вхід якого зв'язаний з...
Спосіб автоматичного регулювання кутової швидкості та пристрій для його здійснення
Номер патенту: 34183
Опубліковано: 15.02.2001
Автор: Ключковський Сергій Миронович
МПК: G05D 13/00
Мітки: швидкості, спосіб, автоматичного, регулювання, здійснення, кутової, пристрій
Текст:
...і сили акумулятора, то при зміні однієї з них, а саме - відцентрової сили, рівновага порушується і ланки здійснюють рух, змінюючи при цьому динамічний момент інерції системи. Наслідком зміни останнього є виникнення на валу крутного моменту, який запобігає подальшому відхиленню швидкості. Таким чином, відбувається автоматична зміна потоку рушійної енергії в регульованій системі, джерелом якої є акумулятор механічної енергії. Пристрій для...
Аналоговий датчик кутової швидкості
Номер патенту: 22701
Опубліковано: 07.04.1998
Автори: Кулаков Павло Ігорович, Поджаренко Володимир Олександрович, Михалевич Володимир Маркусович, Кухарчук Василь Васильович, Кучерук Володимир Юрійович, Поджаренко Андрій Володимирович
МПК: G01P 3/42
Мітки: аналоговий, кутової, датчик, швидкості
Формула / Реферат:
Аналоговый датчик угловой скорости, содержащий вал, модулятор светового потока в виде диска, связанный с валом, источник света расположенный перед модулятором, линейный фотоприемник, расположенный напротив источника света по другую сторону модулятора, диафрагму, установленную перед линейным фотоприемником, отличающийся тем, что диафрагма имеет прорезь, форма которой ограничена двумя лучами, которые начинаются в центре модулятора светового...
Датчик кутової швидкості та система його віброзахисту
Номер патенту: 1207
Опубліковано: 15.04.2002
Автори: Васильєв Володимир Леонідович, Гуменюк Володимир Григорович, Шкляр Володимир Петрович, Шервашидзе Володимир Варлаамович, Леоненко Сергій Миколайович, Олексієнко Микола Петрович, Гаврилюк Володимир Леонідович
МПК: G01C 19/00, G01P 9/00
Мітки: кутової, віброзахисту, швидкості, датчик, система
Формула / Реферат:
1. Датчик кутової швидкості, який містить розміщений за допомогою підвісу чутливий елемент з гіромотором, датчик положення, коло зворотного зв'язку та схему визначення показника кутової швидкості, який відрізняється тим, що чутливий елемент підвішено у корпусі за допомогою гнучкого підвісу, гіромотор встановлено на чутливому елементі так, що вісь його обертання направлена перпендикулярно до осі, по якій згинається підвіс, і паралельно з віссю...
Попередній патент: Спосіб виробництва ординарного міцного червоного виноградного вина “портвейн октябрський”
Наступний патент: Модульний магніторідинний герметизатор
Випадковий патент: Зчитувач даних з електронних документів