Цифрова система компенсації несинхронних імпульсних завад
Номер патенту: 46625
Опубліковано: 15.05.2002
Автори: Чорнобородов Михайло Петрович, Часовський Валентин Олександрович
Формула / Реферат
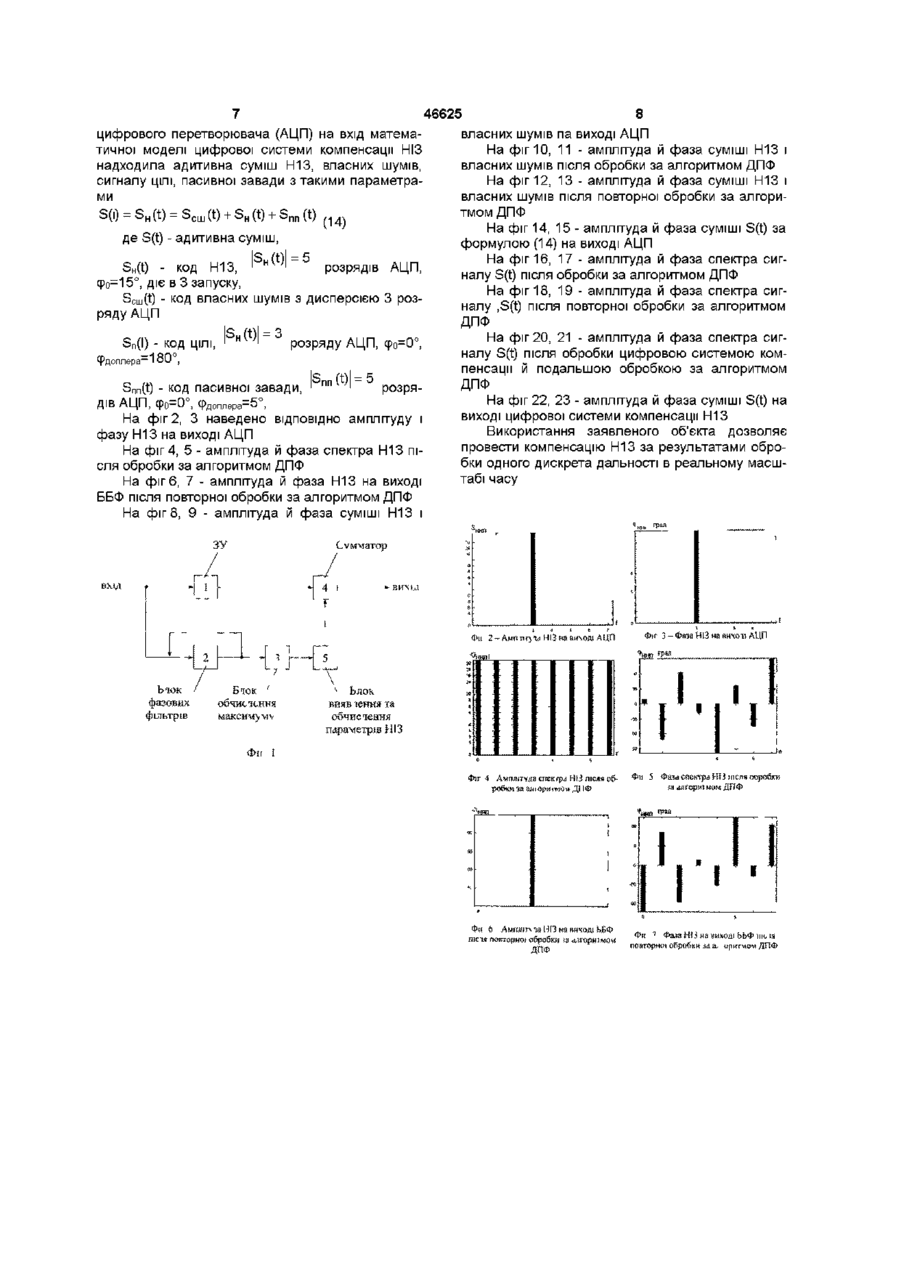
Цифрова система компенсації несинхронних імпульсних завад, у якій використовується дворазове перетворення Фур'є для визначення параметрів несинхронної імпульсної завади, що містить запам'ятовуючий пристрій, вхід якого з'єднаний із входом системи, суматор, один із входів якого з'єднаний з виходом запам'ятовуючого пристрою, а вихід з'єднаний з виходом системи, блок фазових фільтрів, вхід якого з'єднаний із входом системи, яка відрізняється тим, що додатково введено блок обчислення максимуму, вхід якою з'єднаний з виходом блока фазових фільтрів, а вихід з'єднаний із входом блока виявлення та обчислення параметрів несинхронної завади, вихід якого з'єднаний з другим входом суматора, а також введено зворотний зв'язок з виходу блока фазових фільтрів на його вхід.
Текст
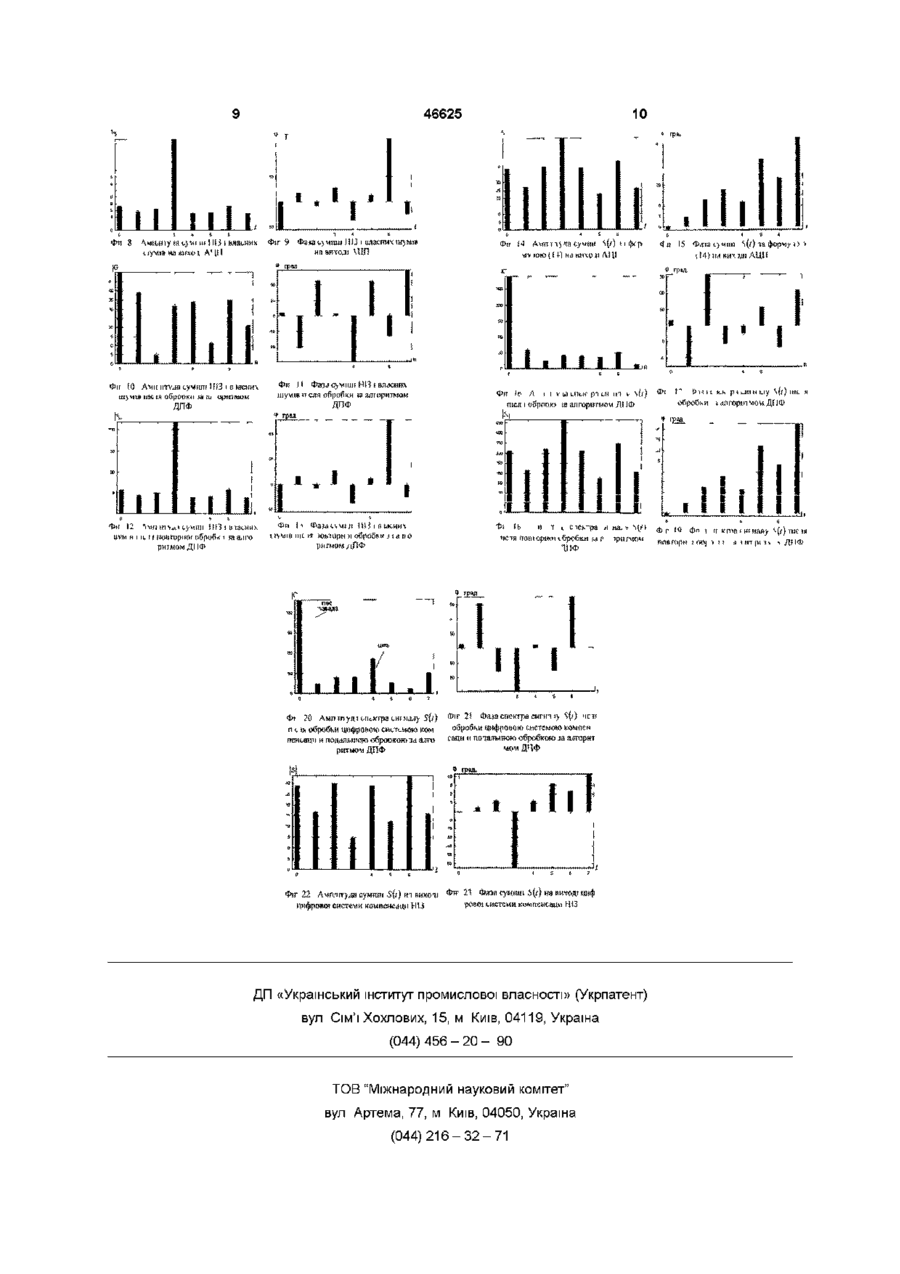
Цифрова система компенсації несинхронних імпульсних завад, у якій використовується дворазове перетворення Фур'є для визначення параметрів несинхронної імпульсної завади, що містить запамятовуючии пристрій, вхід якого з єднаний із входом системи, суматор, один із входів якого з'єднаний з виходом запам'ятовуючого пристрою, а вихід з'єднаний з виходом системи, блок фазових фільтрів, вхід якого з'єднаний із входом системи, яка відрізняється тим, що додатково введено блок обчислення максимуму, вхід якою з'єднаний з виходом блока фазових фільтрів, а вихід з'єднаний із входом блока виявлення та обчислення параметрів несинхронної завади, вихід якого з'єднаний з другим входом суматора, а також введено зворотний зв'язок з виходу блока фазових фільтрів на його вхід Винахід належить до галузі радіолокації і може бути використаний в імпульсних радіолокаційних станціях (РЛС), які забезпечують високу завадозахищеність в умовах дії несинхронних імпульсних завад (Н13) ВІДОМІ системи захисту від завад (Заявка ФРН за класом G01S 7/36 публ 7 04 77, Теоретические основы радиолокации Под ред Ширмана Я Д «Сов радио», М , 1970, с 432), що містять основний і допоміжний канали прийому, керований підсилювач з комплексним регульованим коефіцієнтом передачі, суматор, помножувач-усєреднювач (корелятор) Такі системи захисту забезпечують достатньо високу ефективність придушення активних завад, але потребують великої КІЛЬКОСТІ інформації, що обробляється, для вироблення комплексних коефіцієнтів передачі Відомий пристрій „Селектор імпульсних завад" (Ас СРСР №1166025 від 7071985, кл G01S 7/36), в основі роботи якого лежить аналіз наявності Н13 після зважування реалізацій з виходу аналого-цифрового перетворювача (АЦП) у кожному елементі розділення дальності на протязі трьох тривалостей розгорток дальності і порівняння з порогом Селекція імпульсних завад здійснюється за ознакою відсутності часової періодичності в суміжних розгортках дальності До недоліків цього пристрою належить те, що поріг виявлення ІІпв не є функцією співвідношення сигнал/шум, а є функ цією періодичності у часі, що призводить до пропуску цілей Відома система захисту від завад „Цифрова система компенсації активних завад" (А с СРСР №241164 від 8 101985), яка використовує для обробки у цифровому вигляді квадратурні складові послідовностей із N періодів повторення, які містять сигнали цілей, активних і пасивних завад, прийнятих основною і допоміжними антенами радіолокатора Система складається з основного блока фазових фільтрів, основного блока формування груп фільтрів, основного комутатора, блока вибору вагового коефіцієнта, допоміжного блока фазових фільтрів, допоміжного блока формування груп фільтрів, допоміжного комутатора, блоків вибору коефіцієнта кореляції, блока вибору вагового коефіцієнта, блока вибору оптимального вагового коефіцієнта, блока вибору максимального коефіцієнта кореляції, блока основного ЗП, блока допоміжного ЗП, помножника, суматора Компенсація завад здійснюється у кожному дискреті дальності на основі обчислення максимального коефіцієнта взаємної кореляції між групами основних і допоміжних неперекривних фільтрів Після визначення максимального коефіцієнта взаємної кореляції для кожного дискрета дальності ВІДПОВІДНО до (1) ю (О (О 46625 мується при здійсненні пропонованого технічного и и осн доп рішення, полягає втому, що здійснюється компенсація Н13 за результатами обробки одного дисOCH ДОП крета дальності без використання допоміжного (1) каналу На фіг 1 наведено структурну схему цифрової де - модуль коефіцієнта кореляції основносистеми компенсації несинхронних імпульсних го й допоміжного каналів, завад и осн Цифрова система компенсації Н13 складаєть- модуль амплітуди основного каналу, ся із запам'ятовуючого пристрою (ЗП) 1, з'єднаного ДОП із входом системи та суматором 4, блока фазових - модуль амплітуди допоміжного канафільтрів 2 (БФФ), блока обчислення максимуму З лу, (БОМ), блока виявлення та обчислення параметІІдоп* - амплітуда комплексно-спряженого сигрів несинхронно! імпульсної завади 5 (БВОПН13) налу допоміжного каналу, вибирається ВІДПОВІДНИЙ комплексний ваговий Вхід блока 2 (БФФ) з'єднаний із входом систекоефіцієнт, який залишається незмінним для кожми компенсації Н13, а вихід БФФ з'єднаний із вхоного поточного дискрета дальності на час проходом БОМ 3 і власним входом Вихід блока З (БОМ) дження пакета з N зондувань з'єднаний із входом блока 5 (БВОПН13), вихід и и блока 5 (БВОПН13) з'єднаний з другим входом осн доп К = суматора 4 Вихід суматора 4 з'єднаний з виходом системи компенсації Н13 ДОП (2) Робота цифрової системи компенсації Н13 поСуттєвими ознаками, що співпадають з прополягає в такому нованою цифровою системою компенсації несинхНа вхід системи надходять у цифровому виронних імпульсних завад є наявність основного гляді квадратурні складові послідовностей з N-1 запам'ятовуючого пристрою, суматора, основного періодів повторення, які являють собою адитивну блока фазових фільтрів суміш сигналів від цілей, активних і пасивних заДо недоліків даної системи належить побудовад, прийнятих основною антеною радіолокатора ва допоміжного каналу обробки радіолокатора Прийнята інформація надходить на вхід запам'яНайбільш близькою за технічною сутністю до товуючого пристрою 1 (ЗП) і вхід блока фазових пропонованої цифрової системи захисту від імпуфільтрів (БФФ) У ЗП відбувається запам'ятовульсних завад є "Система компенсації активних вання інформації від кожного дискрета дальності завад" (Ас СРСР №238033 від 21 08 1985), яка на протязі N-1 періодів запуску містить основний і допоміжний блоки фазових фіУ блоці БФФ відбувається розфільтруваїшя льтрів, блок обчислення вагового коефіцієнта, оссигналу кожного дискрета дальності фазовими новний і допоміжний запам'ятовуючі пристрої, суфільтрами за алгоритмом дискретного перетвоматор, помножувач, основний і ДОПОМІЖНІ рення Фур'є (ДПФ) або його модифікацій [„Цифрокомутатори вые фильтры и устройства обработки сигналов на У цій системі ваговий коефіцієнт компенсатора интегральных микросхемах" Под ред Б Ф Высоцможе обчислюватися за завадою, яка діє в одному кого М ДиС, 1984, раздел 44] дискреті дальності Ослаблення впливу корисного Відомо, ЩО Н13, яка потрапила до одного з Nсигналу на якість компенсації дискретної завади 1 запусків поточного дискрета дальності, після досягається використанням усередненого вагового розфільтрування за алгоритмом ДПФ дає однакокоефіцієнта для великої КІЛЬКОСТІ фільтрів, що не вий відгук за амплітудою на виходах усіх фазових перекриваються за частотою, розрахованих для фільтрів для одного дискрета дальності одного дискрета дальності Спектр Н13 визначається за допомогою алгоДо недоліків цієї системи треба віднести зниритму ДПФ згідно з формулою (3) ження ефективності компенсації активної завади, коли КІЛЬКІСТЬ неперекривних фільтрів, вільних від N-1 _^ пасивних завад і сигналів цілей, невелика, і тому наявність пасивних завад і цілей починає познача1=0 (3) тися на результаті компенсації, обов'язкове викоде І - номер часової вибірки пачки імпульсів, ристання допоміжного каналу, що призводить до яка складається з N-i ВІДЛІКІВ, значних витрат обладнання N-1- КІЛЬКІСТЬ імпульсів у частотній пачці, У пропонованому технічному рішенні поставК т - коефіцієнт вагового вікна, лено задачу здійснити компенсацію Н13 за реSH(m) - комплексне значення амплітуди Н13, зультатами обробки одного дискрета дальності m - помер часової вибірки, в якій діс Н13 без використання допоміжного каналу обробки (m=0-N-1), Поставлена задача розв'язується тим, що зап - номер спектральної складової (номер фавдяки пропонованій побудові схеми не використозового фільтра n=0-N-1) вується допоміжний канал обробки, а разом з ним Розглядаючи (3) для випадку, коли в одному із основний комутатор, блок обчислення вагового запусків діє Н13, формула перетворюється на коефіцієнта, помножувач, вводиться зв'язок з виходу блока фазових фільтрів на його ж вхід, блок GH(n)=K m S H (m)e" J N n m обчислення максимуму, блок виявлення та обчис(4) лення параметрів Н13 а враховуючи початкову фазу Н13 еро вираз (4) перетворюється на Таким чином, технічний результат, який отриJ П І П Н G H (n) = K Я fm4p Jtf bp -J 271 2л і N - к 46625 6 рогу Р н , якщо виконується умова (8) Я fml ї Р (5) Легко визначити, що різниця фаз між сусідніми складовими ЛІНІЯМИ спектра Н13 є функцією часу, тобто залежить тільки від номера часової вибірки т, на який діє Н13, Для цього визначимо різницю фаз між відгуками n-го та (п+1)-го фазових фільтрів Km|SH(m) G H (n 2л Лcft GH(n) KmSn(m) J Фо 2л -і—m > JN 2л 2л -і—m = ІЄ N (6) В умовах апріорної невизначеності часу впливу Р13 па РЛС річниця фаз між сусідніми спектральними складовими фазових фільтрів БФФ Дф- — m N може приймати значення від 0 до 2 л радіан Задача визначення номера запуску т, в якому присутня Н13, зводиться до визначення різниці фаз Дф Ця задача розв'язується за допомогою додатково введеного зворотного зв'язку з виходу блока фазових фільтрів на його ж вхід В цьому випадку повторна обробка за алгоритмом ДПФ ВІДПОВІДНО до (7) еквівалентна розв'язанню задачі доплерівської фільтрації N-1 q=0 2л KmSH(m) 2л е N U) спектр функції 2л KmSH(m)e надходження Н13, аргумент якої - час q - коефіцієнти вагового вікна, q=0-N-1, i=0-N-1, З урахуванням формул (3) та (7) функція Х(і) за наявності Н13 матиме максимального значення за умови 2л 2л — m = —і N N тобто, коли і=т Таким чином, визначивши номер фазового фільтра, в якому відбулося когерентне накопичення дискретизованої функції часу, К, K m S H ( m ) 2л Л (ft— -І можна обчислити номер запуску т , в якому впливала Н13 Ця задача розв'язується за допомогою блока обчислення максимуму 3 (фиг 1) 3 виходу блока 3 на вхід блока виявлення та обчислення параметрів Н13 надходить код Х(і)тах і помер фазового фільтра, який ВІДПОВІДаЄ Х(і)таж У блоці 5 код Х(І)МАХ порівнюється з кодом по "(8) Sн (гтПе^ відбувається обчислення коду ^ ' Сутність алгоритму обчислення полягає в тому , що необхідно провести - перерахунок Х(і)тах пов'язаний з когерентним накопиченням - перерахунок Х(і)тах, пов'язаний з помноженням на коефіцієнти вагового вікна Kq - перерахунок Х(і)тах, пов'язаний з помноженням на коефіцієнт вагового вікна К т Оскільки ЦІ перерахунки пов'язані з використанням постійних коефіцієнтів, то бути представлене виразом (9) може SH(m)e^=X(i)maxQ1Q2Q3 ,(9) де коефіцієнт, який враховує когерентне накопичення N-1 (10) коефіцієнт, який враховує помноження ПОСЛІДОВНОСТІ Сн(п) на коефіцієнти вагового вікна, які використовуються для мінімізації рівня бічних пелюсток характеристики фазових фільтрів Q 2 1 + Оз1 + K(m) коефіцієнт, який враховує помноження ПОСЛІДОВНОСТІ Sfi(m} на коефіцієнти вагового вікна, які використовуються для мінімізації рівня бічних пелюсток характеристики фазових фільтрів К(т) Оскільки коефіцієнти вагового вікна є дійсними числами і не змінюються в процесі компенсації, так само як величина N, обчислення виразу (9) технічних труднощів не викликає і реалізується у блоці 5 з використанням постійного запам'ятовуючого пристрою (ТТЗП) Код номера запуску т , в якому діє Н13 визначається з умови (13) 0,еслиХ(і)г єі = 0 m= N-i m a x ecnHX(i) (13) де ІМАХ - номер фазового фільтра, що відповідає Х(і)таж S (m)e№ З виходу блока 5 код H і код номера запуску т, в якому діє Н13, надходить на другий вхід суматора 4 На перший вхід суматора надходить Інформація з виходу ЗП (І) На виході суматора для дискрета дальності, то обробляється І //7-го запуску відбувається віднімання коду Н13 із коду адитивної суміші сигналу, активних і пасивної завад На вихід системи компенсації проходять сигнали від цілей, пасивних, активних шумових завад Якщо умова (8) не виконується, то компенсація не відбувається Для перевірки алгоритму роботи цифрової системи компенсації було проведено математичне моделювання 3 виходу 12-розрядного аналого 8 власних шумів па виході АЦП На фіг 10, 11 - амплітуда й фаза суміші Н13 і власних шумів після обробки за алгоритмом ДПФ На фіг 12, 13 - амплітуда й фаза суміші Н13 і власних шумів після повторної обробки за алгоритмом ДПФ На фіг 14, 15 - амплітуда й фаза суміші S(t) за формулою (14) на виході АЦП На фіг 16, 17 - амплітуда й фаза спектра сигналу S(t) після обробки за алгоритмом ДПФ На фіг 18, 19 - амплітуда й фаза спектра сигналу ,S(t) після повторної обробки за алгоритмом ДПФ На фіг 20, 21 - амплітуда й фаза спектра сигналу S(t) після обробки цифровою системою компенсації й подальшою обробкою за алгоритмом ДПФ На фіг 22, 23 - амплітуда й фаза суміші S(t) на виході цифрової системи компенсації Н13 Використання заявленого об'єкта дозволяє провести компенсацію Н13 за результатами обробки одного дискрета дальності в реальному масштабі часу 46625 цифрового перетворювача (АЦП) на вхід математичної моделі цифрової системи компенсації НІЗ надходила адитивна суміш Н13, власних шумів, сигналу ЦІЛІ, пасивної завади з такими параметрами S(i) = S H (t) = S c m (t) + S H (t) + S n n (t) ( 1 4 ) де S(t) - адитивна суміш, SH ft) = 5 W SH(t) - код Н13, H розрядів АЦП, Фо=15°, діє в 3 запуску, Scujft) - код власних шумів з дисперсією 3 розряду АЦП SH(t)=3 розряду АЦП, фо=0°, Sn(l) - код ЦІЛІ, =5 Snn(t) - код пасивної завади, ДІВ АЦП, фо=0°, фдоплера=5°, розря На фіг 2, 3 наведено ВІДПОВІДНО амплітуду і фазу Н13 на виході АЦП На фіг 4, 5 - амплітуда й фаза спектра Н13 після обробки за алгоритмом ДПФ На фіг 6, 7 - амплітуда й фаза Н13 на виході ББФ після повторної обробки за алгоритмом ДПФ На фіг 8, 9 - амплітуда й фаза суміші Н13 і ЗУ Сумматор 4 ї - BHNU f -Фаза ШЗ на вичои АЦП Фіі 2 - А М П И Г ) І S(() -icis п < у, обробки цифроною си^іч.м
ДивитисяДодаткова інформація
Автори англійськоюChasovskyi Valentyn Oleksandrovych
Автори російськоюЧасовский Валентин Александрович
МПК / Мітки
МПК: G01S 7/36
Мітки: система, несинхронних, цифрова, компенсації, завад, імпульсних
Код посилання
<a href="https://ua.patents.su/5-46625-cifrova-sistema-kompensaci-nesinkhronnikh-impulsnikh-zavad.html" target="_blank" rel="follow" title="База патентів України">Цифрова система компенсації несинхронних імпульсних завад</a>
Пристрій компенсації активних шумових завад
Номер патенту: 38217
Опубліковано: 15.05.2001
Автори: КОПНОВ МИХАЙЛО ОЛЕКСАНДРОВИЧ, Лаврентьєв Володимир Миколайович, Мирошниченко Михайло Іванович, Немчин Олександр Федорович, Мокеєв Юрій Геннадійович, КОНОНОВИЧ ВІКТОР ЯКОВИЧ, Луханін Михайло Іванович, Попов Олег Якович, Каспирович Олександр Геннадійович
МПК: G01S 7/36
Мітки: завад, активних, шумових, пристрій, компенсації
Формула / Реферат:
1. Пристрій компенсації активних шумових завад, що включає блок обчислення вагових коефіцієнтів, лінію затримки основного каналу, лінію затримки додаткового каналу, блок множення, блок віднімання, причому входи лінії затримки основного каналу і лінії затримки додаткового каналу є входами пристрою вихід лінії затримки додаткового каналу сполучений із першим входом блока множення, вихід якого сполучений із входом блока віднімання, перший вхід...
Радіолокатор з пристроєм компенсації завад відніманням
Номер патенту: 32194
Опубліковано: 15.12.2000
Автори: Пророшин Сергій Михайлович, Бахвалов Валентин Борисович, Кудрик Андрій Миколайович
МПК: G01S 7/36
Мітки: компенсації, пристроєм, відніманням, завад, радіолокатор
Текст:
...(в тому числі і кругової) поляризації навіть за відсутністю просторових і часових відмінностей завади і сигналу. Поставлена задача вирішується тим, що в радіолокаторі з пристроєм компенсації завад відніманням, що містить антенну систему, антенний перемикач і пов'язаний з ним передавач імпульсного сигналу, приймач сигналу, пристрій віднімання та індикатор, згідно з винаходом антенна система виконана у вигляді рупорно-параболічної антени з...
Радіолокатор з пристроєм компенсації завад
Номер патенту: 32193
Опубліковано: 15.12.2000
Автори: Кудрик Андрій Миколайович, Бахвалов Валентин Борисович, Пророшин Сергій Михайлович
МПК: G01S 7/36
Мітки: радіолокатор, завад, компенсації, пристроєм
Текст:
...пристрої використовуються поляризаційні відмінності завади і луна-сигналу цілі. Випромінюється зондуючий сигнал горизонтальної поляризації і луна-сигнал цілі також має в основному горизонтальну поляризацію. Припускається, що завада має лінійну поляризацію і містить як горизонтальну, так і вертикальну складові поля. Фази цих складових однакові, а амплітуди можуть відрізнятися, але не дуже сильно. Запропонований пристрій призначений для...
Цифрова комутаційна система
Номер патенту: 5341
Опубліковано: 28.12.1994
Автори: Абугов Гелій Петрович, Бєляк Володимир Бенціанович, Поляк Марк Урієвич
МПК: H04M 3/00
Мітки: система, цифрова, комутаційна
Формула / Реферат:
1. Цифровая коммутационная система, содержащая модуль транзитной коммутации, l модулей абонентской концентрации, l•m удаленных абонентских модулей, l•m•n телефонных аппаратов, каждый из которых через соответствующий удаленный абонентский модуль соединен с соответствующим из m входов-выходов модуля абонентской концентрации, другие входы-выходы которого соединены с соответствующими входами-выходами модуля транзитной коммутации, другие р...
Цифрова система управління наведенням рухомого об’єкта
Номер патенту: 10677
Опубліковано: 25.12.1996
Автори: Тунік Анатолій Азарійович, Сокол Сергій Олексійович
МПК: G05B 11/00
Мітки: об'єкта, цифрова, система, рухомого, наведенням, управління
Формула / Реферат:
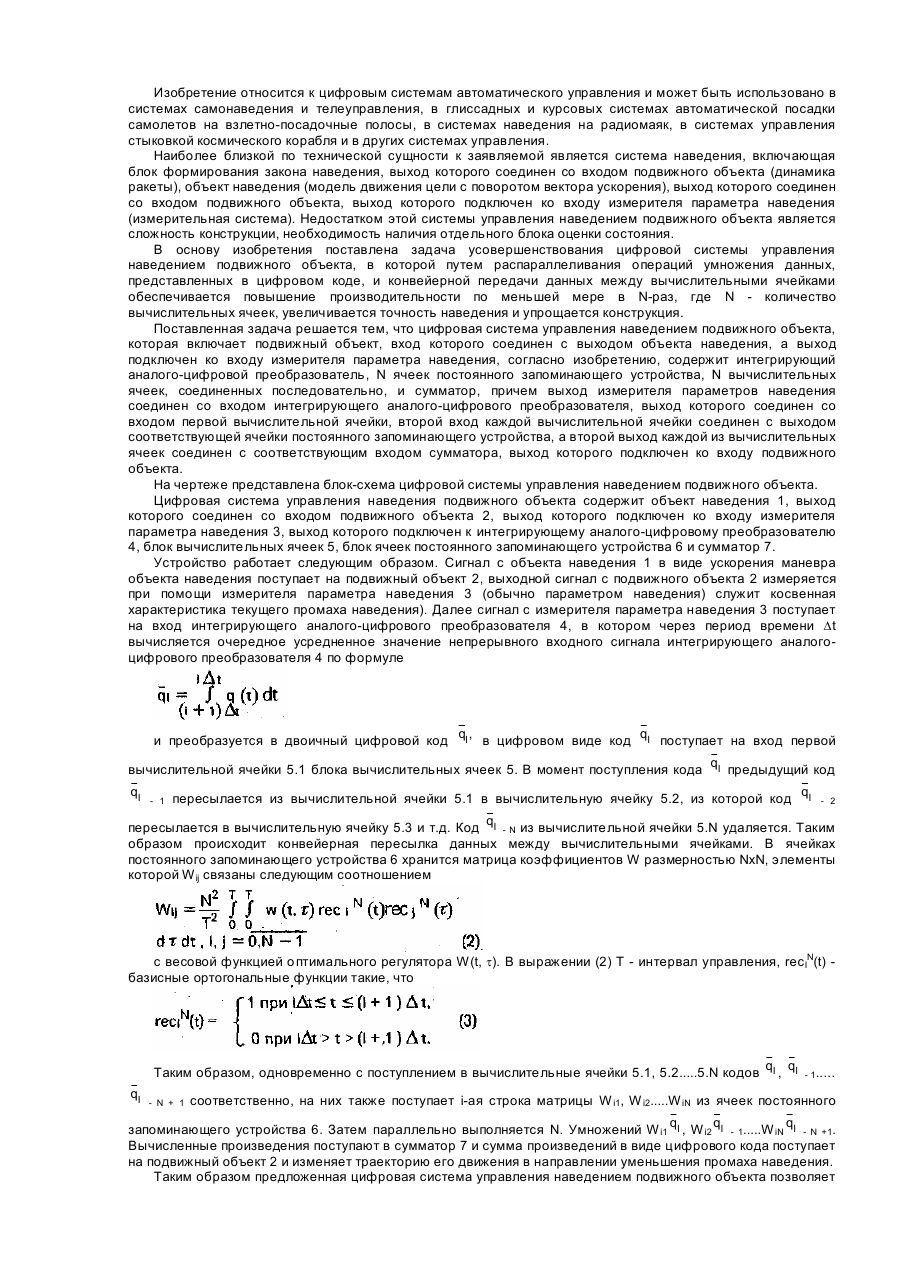
Цифровая система управления наведением подвижного объекта, включающая подвижный объект, вход которого соединен с выходом объекта наведения, а выход подключен ко входу измерителя параметра наведения, отличающаяся тем, что она содержит интегрирующий аналого-цифровой преобразователь, N ячеек постоянного запоминающего устройства, N вычислительных ячеек, соединенных последовательно, и сумматор, причем выход измерителя параметра наведения...
Попередній патент: Фунгіцидний склад
Наступний патент: Спосіб тимчасового ендоваскулярного виключення судин з магістрального кровоплину та пристрій для його здійснення
Випадковий патент: Спосіб визначення кількості життєздатних мікроорганізмів у складі біоплівки