Спосіб вимірювання топогеодезичних показників та гіроскопічний інклінометр для його реалізації
Номер патенту: 60288
Опубліковано: 15.09.2003
Автори: Мурзаханов Олександр Валентинович, Леоненко Костянтин Миколайович, Шервашидзе Володимир Варламович
Формула / Реферат
1. Спосіб вимірювання топогеодезичних показників за допомогою гіроскопічного інклінометра, який полягає у тому, що інклінометр занурюють до об'єкта вимірювань, опускають або піднімають з постійною швидкістю, у процесі неперервного руху через рівні проміжки часу вимірюють та розраховують інклінометричні показники об'єкта, який відрізняється тим, що за командою оператора у будь-який момент часу інклінометр зупиняють, у точці зупинки вимірюють та безпосередньо у той же момент часу розраховують інклінометричні показники, після чого, за необхідності, рух приладу поновлюють.
2. Спосіб вимірювання топогеодезичних показників за допомогою гіроскопічного інклінометра за п. 1, який відрізняється тим, що вимірюють кутову швидкість шляхом подачі на ротор гіромотора кожного гіроскопічного датчика кутової швидкості (ГДКШ) напруги для розкручування гіромотора до його виходу на стаціонарний режим обертання; на виході датчика вимірюють напругу при даному напрямку обертання ротора гіромотора (U+); реверсують вектор кінетичного моменту ротора гіромотора, наприклад, за допомогою зміни черговості фаз; на виході датчика повторно вимірюють напругу при даному реверсованому напрямку обертання ротора гіромотора (U-); за допомогою контролера з аналогово-цифровим перетворювачем контролюють час вимірювання напруги до та після реверсу ротора гіромотора, без урахування часу самого реверсу, та розраховують значення корисної (К) та/або похибкової (П) складових вихідного сигналу за формулами:
К=(U+-U-)/2 та П=(U+-U-)/2.
3. Гіроскопічний інклінометр, що складається з поміщеного у захисний кожух циліндричного корпусу, у якому встановлені три ГДКШ, модуль акселерометрів, модуль електроніки, блок живлення, система віброзахисту і пристрій орієнтації та фіксації інклінометра у об'єкті вимірювань, який відрізняється тим, що в ньому використовують два ГДКШ, у яких осі чутливості співпадають з осями Х та Y ортогональної системи координат, при цьому осі обертання гіромоторів кожного з ГДКШ є направленими перпендикулярно до осі, по якій згинається підвіс, і паралельно до осі симетрії чутливого елемента, та один ГДКШ, у якого вісь чутливості співпадає з віссю Z ортогональної системи координат, причому вісь його обертання направлена перпендикулярно до осі, по якій згинається підвіс, і до осі симетрії чутливого елемента.
4. Гіроскопічний інклінометр за п. 3, який відрізняється тим, що модуль електроніки, ГДКШ, блок живлення, блок акселерометрів та пристрої орієнтації і фіксації кріпляться до корпусу за допомогою рознімів.
5. Гіроскопічний інклінометр за пп. 3, 4, який відрізняється тим, що корпус кріпиться до захисного кожуха за допомогою пружин, які являють собою систему віброзахисту інклінометра.
Текст
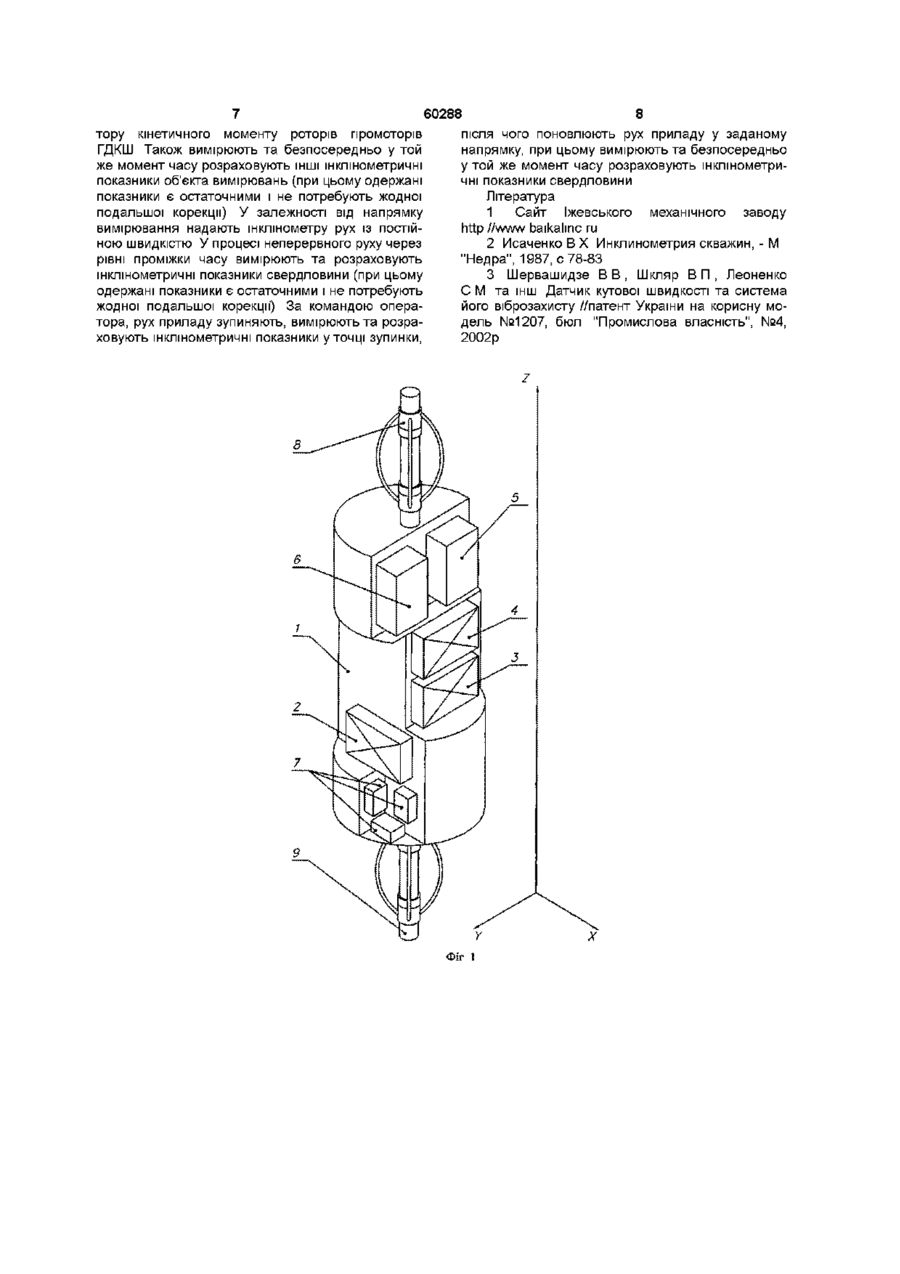
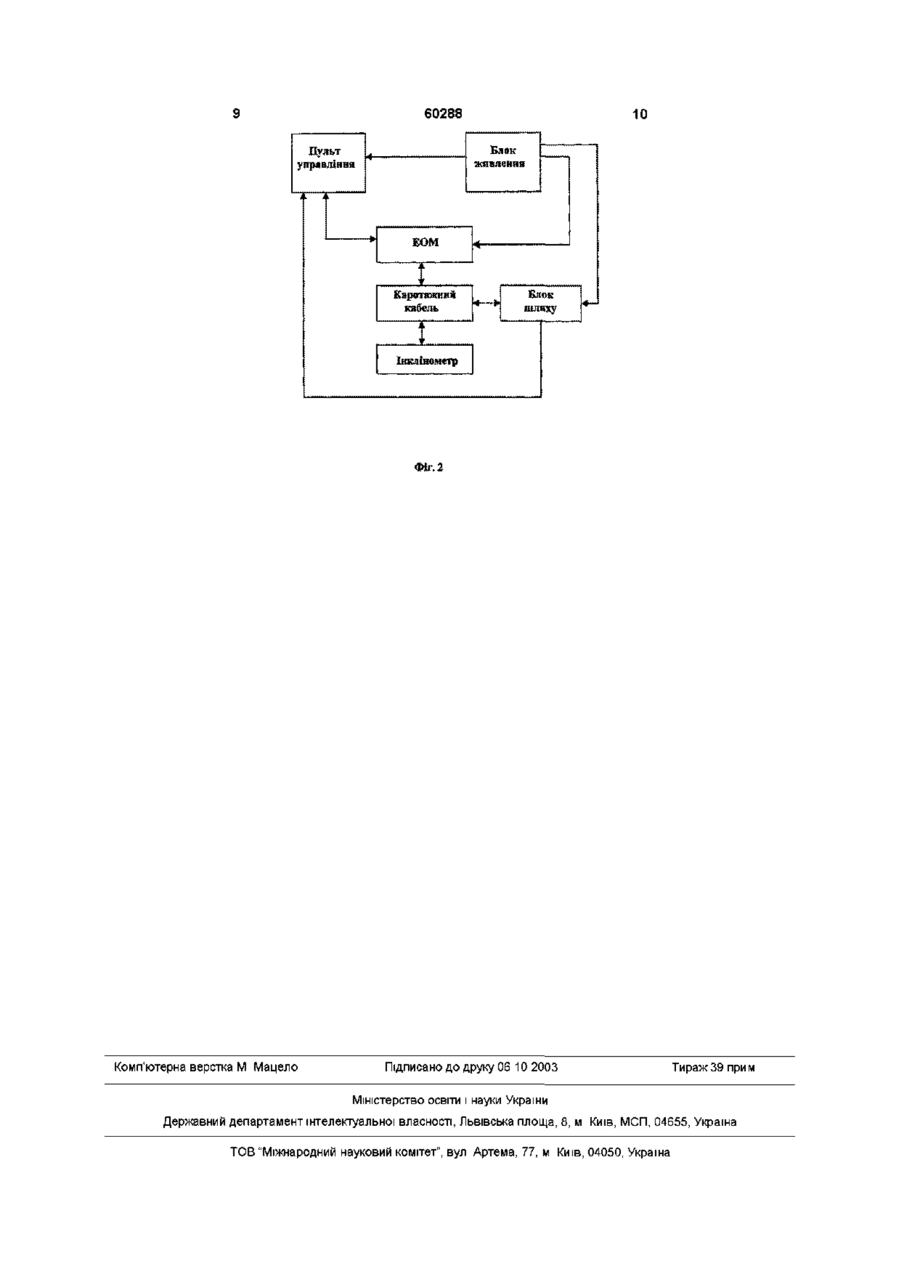
1 Спосіб вимірювання топогеодезичних показників за допомогою гіроскопічного інклінометра, який полягає утому, що інклінометр занурюють до об'єкта вимірювань, опускають або піднімають з постійною швидкістю, у процесі неперервного руху через рівні проміжки часу вимірюють та розраховують інклінометричні показники об'єкта, який відрізняється тим, що за командою оператора у будь-який момент часу інклінометр зупиняють, у точці зупинки вимірюють та безпосередньо у той же момент часу розраховують інклінометричні показники, після чого, за необхідності, рух приладу поновлюють 2 Спосіб вимірювання топогеодезичних показників за допомогою гіроскопічного інклінометра за п 1, який відрізняється тим, що вимірюють кутову швидкість шляхом подачі на ротор промотора кожного гіроскопічного датчика кутової швидкості (ГДКШ) напруги для розкручування промотора до його виходу на стаціонарний режим обертання, на виході датчика вимірюють напругу при даному напрямку обертання ротора промотора (U+), peверсують вектор кінетичного моменту ротора промотора, наприклад, за допомогою зміни черговості фаз, на виході датчика повторно вимірюють напругу при даному реверсованому напрямку Винахід належить до вимірювальної техніки і стосується способу та пристрою для вимірювання топогеодезичних показників, зокрема, зенітного кута, азимута, кута установки відхилювача у нахильних та нахильно-горизонтальних свердловинах обсадженого та необсадженого типів, у процесі обертання ротора промотора (U), за допомогою контролера з аналогово-цифровим перетворювачем контролюють час вимірювання напруги до та після реверсу ротора промотора, без урахування часу самого реверсу, та розраховують значення корисної (К) та/або похибкової (П) складових вихідного сигналу за формулами К=(ІІ + -и)/2таП=(и + -ІІ)/2 3 Гіроскопічний інклінометр, що складається з поміщеного у захисний кожух циліндричного корпусу, у якому встановлені три ГДКШ, модуль акселерометрів, модуль електроніки, блок живлення, система віброзахисту і пристрій орієнтації та фіксації інклінометра у об'єкті вимірювань, який відрізняється тим, що в ньому використовують два ГДКШ, у яких осі чутливості співпадають з осями X та Y ортогональної системи координат, при цьому осі обертання промоторів кожного з ГДКШ є направленими перпендикулярно до осі, по якій згинається ПІДВІС, і паралельно до осі симетрії чутливого елемента, та один ГДКШ, у якого вісь чутливості співпадає з віссю Z ортогональної системи координат, причому вісь його обертання направлена перпендикулярно до осі, по якій згинається ПІДВІС, і до осі симетрії чутливого елемента 4 Гіроскопічний інклінометр за п 3, який відрізняється тим, що модуль електроніки, ГДКШ, блок живлення, блок акселерометрів та пристрої орієнтації і фіксації кріпляться до корпусу за допомогою рознімів 5 Гіроскопічний інклінометр за пп 3, 4, який відрізняється тим, що корпус кріпиться до захисного кожуха за допомогою пружин, які являють собою систему віброзахисту інклінометра топогеодезичного забезпечення будівництва тунелів, шахт, при укладці трубопроводів, бурінні свердловин, а також у інших сферах промисловості, в тому числі при роботі у складі телеметричних бурових систем в умовах з високим рівнем радіації, температури та навантажень тощо 00 00 о (О 60288 З літератури [1] відомий точковий спосіб вимірювань інклінометричних показників за допомогою інклінометру ИГ-73-120/60, що полягає у опусканні або витягуванні інклінометру з об'єкту вимірювань із зупинками уточках вимірювань З цього ж джерела відомий гіроскопічний інклінометр ИГ-73-120/60, що реалізує вищезгаданий спосіб інклінометри і складається з чутливого елементу, у вигляді сферичного гіроскопу, з електромагнітним ПІДВІСОМ ротора, який одночасно працює у режимі двохсотого датчика кутової швидкості та трьохосного акселерометра До недоліків даних способу та пристрою, зокрема, належать необхідність попереднього калібрування та настройки приладу перед спуском на спеціальному обладнанні, неможливість здійснення вимірювань при русі у, наприклад, свердловині, а внаслідок цього невизначеність точного профілю між точками вимірювань, що веде до збільшення КІЛЬКОСТІ вимірювань, а ВІДПОВІДНО І загального часу роботи, складність електронних систем та електромагнітного підвісу, підвищена складність оперативної заміни та/або ремонту складових приладу З літератури [2] відомий неперервний спосіб вимірювання інклінометричних показників за допомогою гіроскопічного інклінометру ИГ-36, що полягає у його попередньому орієнтуванні на заданий напрямок, за допомогою штативу та спеціального візирного пристрою, поступового опускання інклінометра до об'єкту вимірювань з постійною швидкістю та постійним фіксуванням часу вимірювань на даній глибині При ПІДЙОМІ приладу роблять контрольні вимірювання у тих самих точках, що і під час спуску, і також фіксують час вимірювань Після витягування приладу з об'єкту вимірювань його знов встановлюють на штативі у початковому напрямку візування, здійснюють контрольний замір азимуту та записують час здійснення вимірювання для розрахунку поправки у результати вимірювання азимуту З цього ж джерела також відомий гіроскопічний інклінометр ИГ-36, що реалізує вищезгаданий спосіб інклінометри, який складається з розташованих у спільному корпусі пристроїв для вимірювання зенітного кута з двома карданними рамками та гіроскопічної системи для вимірювання азимута, основою якої є гіроскоп у кардановому ПІДВІСІ До недоліків даних способу та пристрою, зокрема, належать необхідність попереднього орієнтування приладу на заданий напрямок, неможливість безпосереднього одержання вірних інклінометричних показників під час вимірювань, наявність спеціального наземного обладнання для корегування отриманих інклінометричних показників, неможливість роботи пристрою у точковому режимі, відсутність тест-контролю, низька точність вимірювання значень азимуту за умов великих значень зенітного кута, що зумовлюється наявністю складної механіки, зокрема карданних ПІДВІСІВ, маятникового пристрою зовнішньої рамки вимірювача зенітного кута, ПІДШИПНИКІВ у контактних щітках тощо, неможливість використання у забойних системах, а також підвищена складність оперативної заміни або ремонту складових приладу Крім того, у даному пристрої, обертання Землі, призво дить до практичної помилки вимірювань, повязаноі із зміною величини дрейфу гіроскопів, що робить неможливим використання інклінометру, з відрегульованого на певну широту місця, і потребує додаткової корекції для вимірювань у різних широтах З літератури [3] відомий ГДКШ, у якому вісь обертання промотору є направленою перпендикулярно до осі, по якій згинається ПІДВІС, І паралельно до осі симетрії чутливого елемента В основу даного винаходу положено задачу створення способу та пристрою для топогеодезичних вимірювань - універсального, високоточного, дешевого та простого у застосуванні що може працювати у точковому та неперервному режимах вимірювань, а також у режимі їх оперативного суміщення, придатний до роботи у забійних системах, має змогу простої та оперативної заміни та/або ремонту його складових, містить функцію самоконтролю результатів вимірювань Поставлена задача досягається шляхом створення способу вимірювання топогеодезичних показників за допомогою гіроскопічного інклінометра, який полягає утому, що інклінометр занурюють до об'єкту вимірювань, опускають (піднімають) з постійною швидкістю, у процесі неперервного руху через рівні проміжки часу, вимірюють та розраховують інклінометричні показники об'єкту При цьому за командою оператора у будь-який момент часу інклінометр зупиняють, у точці зупинки вимірюють та безпосередньо у той же момент часу розраховують інклінометричні показники, після чого, за необхідності, рух приладу поновлюють Крім того у запропонованому способі при вимірюванні кутової швидкості за допомогою ГДКШ використовують послідовне реверсування промоторів датчиків із подальшою обробкою вихідного сигналу при нормальному та реверсованому моментах роторів промоторів, за допомогою контролера з аналогово-цифровим перетворювачем Також для вирішення поставленої задачі запропонований гіроскопічний інклінометр, що складається з розташованого у захисному кожусі циліндричному корпуса у якому на роз'ємах встановлені два ГДКШ, в яких ВІСІ чутливості співпадають з осями X та Y ортогональної системи координат, при цьому осі обертання промоторів кожного з ГДКШ є направленими перпендикулярно до осі, по якій згинається ПІДВІС, І паралельно до осі симетрії чутливого елемента, та один ГДКШ, у якого вісь чутливості співпадає з оссю Z ортогональної системи координат, при чому ось його обертання направлена перпендикулярно до осі, по якій згинається ПІДВІС, І ДО ОСІ симетрії чутливого елемента, модуль акселерометрів (осі чутливості яких також співпадають з осями X, Y, Z), модуль електроніки, що, зокрема, складається з контролера з аналогово-цифровим перетворювачем, блоку розгону та реверсу промоторів, а також модему, блок живлення та пристрій орієнтації та фіксації інклінометру у об'єкті вимірювань Крім того інклінометр містить систему віброзахисту у вигляді системи пружин, що з'єднують корпус інклінометру із захисним кожухом Інклінометрична система на базі запропонованого винаходу складається з апаратури занурення 60288 та наземної апаратури У свою чергу апаратура занурення складається з гіроскопічного інклінометру, з'єднаного з пристроями орієнтації та фіксації інклінометра Наземна апаратура складається з блока управління, обробки та відображення інформації на базі ЕОМ, блока обчислення шляху, пульту управління та блока живлення Наземна апаратура та апаратура занурення з'єднані між собою каротажним кабелем з магнітними мітками Технічним результатом винаходу є - відсутність необхідності у здійсненні початкової орієнтації інклінометра на поверхні землі і наявність тест-контролю, для автоматичної перевірки працездатності приладу перед зануренням та під час роботи, дає змогу контролювати достовірність одержаної під час вимірювань інформації, а також мінімізувати час перевірочних робіт перед використанням приладу, - забезпечення неперервного та точкового режимів інклінометри, а також їх оперативного суміщення дає можливість здійснювати ВІДПОВІДНІ заміри у будь якій точці об'єкту вимірювань, дозволяє знизити КІЛЬКІСТЬ вимірювань та час робіт, тим самим зменшивши їх вартість, забезпечує стабільність показників вимірювань незалежно від часу та нахилу об'єкту вимірювань (при цьому вимірювання здійснюються у реальному масштабі часу), дозволяє отримати профіль об'єкту вимірювань з високим ступенем достовірності, система віброзахисту інклінометру дозволяє використовувати прилад у забійних телеметричних системах даючи можливість здійснювати вимірювання безпосередньо під час бурових робот, що дозволить підвищити їх якість та знизити час виконання та собівартість, - використання двох гіроскопічних датчиків кутової швидкості (ГДКШ) двох конструкцій, осі чутливості котрих утворюють ортогональну просторову систему координат, дозволяють зробити прилад безплатформним і таким чином забезпечують дотримання габаритів для його ефективної роботи у, наприклад, свердловинах стандартних діаметрів, - наявність модульного виконання пристрою, дозволяє здійснювати швидку заміну модулів у випадку виявлення несправностей, що також істотно зменшує час атестаціиних робіт та підвищує їх якість На фіг 1 зображена, пов'язана із ортогональною трьохосною системою координат, схема автономного безплатформного гіроскопічного інклінометру, що складається з циліндричного корпусу (1) у якому розміщені два ГДКШ (2,3), ВІСІ чутливості котрих співпадають, ВІДПОВІДНО, З ОСЯМИ координат Y та X, один ГДКШ (4), ось чутливості котрого співпадає із оссю координат Z, блоку живлення (5), блоку електроніки (6) та блоку акселерометрів (7) осі чутливості яких також співпадають з осями X, Y, Z Корпус з датчиками, блоком живлення, блоком електроніки, а також блоком акселерометрів закріплений у захисному кожусі (на фіг не показаний) за допомогою системи пружин До верхнього та нижнього фланців приладу приєднанні пристрої орієнтації та фіксації інклінометру (8, 9), наприклад, центратори, подовжні осі котрих співпадають із подовжньою оссю інклінометру При цьому до пристрою орієнтації та фіксації 6 інклінометру (8) приєднаний каротажний кабель, що з'єднує інклінометр із наземною апаратурою (на фіг не показаний) На фіг 2 показана схема інклінометричної системи побудованої на базі запропонованого пристрою, яка складається з гіроскопічного інклінометру, з'єднаного з наземним ЕОМ, каротажним кабелем, який має магнітні мітками, блоку живлення, блоку шляху та пульту управління системи Гіроскопічний інклінометр, що реалізує запропонований спосіб вимірювання топогеодезичних показників працює наступним чином Варіант 1 Перед зануренням до об'єкту вимірювань здійснюють тест-контроль роботи інклінометричної системи Інклінометр опускають на задані глибини і зупиняють у точках вимірювання Вимірюють значення кутової швидкості Для чого на ротор промотору кожного ГДКШ, подають напругу для розкручування промотору до його виходу на стаціонарний режим обертання На виході датчику вимірюють напругу при даному напрямку обертання ротору промоторіу (U+) Реверсують вектор кінетичного моменту ротора промотора, наприклад, за допомогою зміни черговості фаз На виході датчика повторно вимірюють напругу при даному реверсованому напрямку обертання ротору промотору (U) При цьому, час вимірювання напруги дота після реверса ротора промотора (не враховуючи час самого реверса) повинен бути однаковим, що контролюють за допомогою контролера з аналогово-цифровим перетворювачем За допомогою цього ж контролера, розраховують значення корисної (К) та/або похибкової (П) складових вихідного сигналу за формулами K=(U+-U )/2 та П=(ІІ + +и )/2 Також вимірюють та безпосередньо у той же момент часу розраховують ІНШІ ІНклінометричні показники об'єкта вимірювань (при цьому одержані показники є остаточними і не потребують жодної подальшої корекції) Варіант 2 Перед зануренням до об'єкту вимірювань здійснюють тест-контроль роботи інклінометричної системи Інклінометр опускають на задану глибину і зупиняють у точці вимірювання Вимірюють значення кутової швидкості шляхом описаного вище 7 послідовного реверсування вектору кінетичного моменту роторів промоторів ГДКШ Також вимірюють та безпосередньо у той же момент часу розраховують ІНШІ інклінометричні показники об'єкта вимірювань (при цьому одержані показники є остаточними і не потребують жодної подальшої корекції) Опускають (піднімають) інклінометр у заданому напрямку із постійною швидкістю У процесі неперервного руху через рівні проміжки часу вимірюють та розраховують безпосередньо у той же момент часу інклінометричні показники об'єкту вимірювань (при цьому одержані показники є остаточними і не потребують жодної подальшої корекції) Варіант 3 Перед зануренням до об'єкту вимірювань здійснюють тест-контроль роботи інклінометричної системи Інклінометр опускають на задану глибину і зупиняють у точці вимірювання Вимірюють значення кутової швидкості шляхом описаного вище послідовного реверсування век 60288 тору кінетичного моменту роторів промоторів ГДКШ Також вимірюють та безпосередньо у той же момент часу розраховують ІНШІ інкпінометричні показники об'єкта вимірювань (при цьому одержані показники є остаточними і не потребують жодної подальшої корекції) У залежності від напрямку вимірювання надають інклінометру рух із постійною швидкістю У процесі неперервного руху через рівні проміжки часу вимірюють та розраховують інклінометричні показники свердловини (при цьому одержані показники є остаточними і не потребують жодної подальшої корекції} За командою оператора, рух приладу зупиняють, вимірюють та розраховують інклінометричні показники у точці зупинки, 8 після чого поновлюють рух приладу у заданому напрямку, при цьому вимірюють та безпосередньо у той же момент часу розраховують інклінометричні показники свердловини Література 1 Сайт Іжевського механічного заводу http //www baikalmc ru 2 Исаченко В X Инклинометрия скважин, - М "Недра", 1987, с 78-83 3 Шервашидзе В В , Шкляр В П , Леоненко С М та шш Датчик кутової швидкості та система його віброзахисту //патент України на корисну модель №1207, бюл "Промислова власність", №4, 2002р X Фіг 1 60288 Каротажний кабель 10 Блок шляху і ч Інклінометр г.2 Комп'ютерна верстка М Мацело Підписано до друку 06 10 2003 Тираж39 прим Міністерство освіти і науки України Державний департамент інтелектуальної власності, Львівська площа, 8, м Київ, МСП, 04655, Україна ТОВ "Міжнародний науковий комітет", вул Артема, 77, м Київ, 04050, Україна
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for measuring topographic and geodetic parameters and a gyroscopic inclinometer for the realization of the method
Назва патенту російськоюСпособ измерения топографических и геодезических параметров и гироскопический инклинометр для осуществления способа
МПК / Мітки
МПК: G01P 9/00
Мітки: гіроскопічний, реалізації, топогеодезичних, інклінометр, спосіб, показників, вимірювання
Код посилання
<a href="https://ua.patents.su/5-60288-sposib-vimiryuvannya-topogeodezichnikh-pokaznikiv-ta-giroskopichnijj-inklinometr-dlya-jjogo-realizaci.html" target="_blank" rel="follow" title="База патентів України">Спосіб вимірювання топогеодезичних показників та гіроскопічний інклінометр для його реалізації</a>
Спосіб вимірювання малих висот польоту над землею та пристрій для його реалізації
Номер патенту: 48476
Опубліковано: 15.08.2002
Автори: Бахвалов Валентин Борисович, Порицький Сергій Леонідович
МПК: G01S 13/00, G01S 13/24
Мітки: висот, землею, польоту, вимірювання, реалізації, пристрій, спосіб, малих
Формула / Реферат:
1. Спосіб вимірювання малих висот польоту над землею, згідно з яким випромінюють з борту вниз неперервний сигнал зондування за допомогою бортової передавальної антени, приймають відбитий від землі сигнал бортовою приймальною антеною і фазовим вимірювачем вимірюють зсув фаз, який відрізняється тім, що випромінюють неперервний синусоїдальний сигнал постійної амплітуди на частоті короткохвильового або середньохвильового діапазону, приймають...
Спосіб вимірювання показників заломлення і поглинання та пристрій для його здійснення
Номер патенту: 42987
Опубліковано: 15.11.2001
Автори: Білинський Йосип Йосипович, Білинська Марина Йосипівна
МПК: G01N 21/43
Мітки: показників, поглинання, вимірювання, пристрій, заломлення, спосіб, здійснення
Формула / Реферат:
1. Спосіб вимірювання показників заломлення і поглинання, який полягає в вимірюванні коефіцієнтів відбивання світла R(q) від границі контакту досліджуваного середовища з високозаломлювальним середовищем в широкому діапазоні кутів падіння q, який відрізняється тим, що визначають максимум першої похідної функції в точці, яка відповідає уявному критичному куту, а отже показнику заломлення, і обчислюють числове значення максимуму першої похідної,...
Спосіб вимірювання електричного струму і пристрій для його реалізації
Номер патенту: 58603
Опубліковано: 15.08.2003
Автори: Фішман Петро Вікторович, Іменохоєв Іван Володимирович, Ходак Ілля Якович
МПК: G01R 19/25
Мітки: вимірювання, струму, електричного, пристрій, спосіб, реалізації
Формула / Реферат:
1. Спосіб вимірювання електричного струму, при якому здійснюють трансформацію вимірюваного струму трансформатором струму, аналогово-цифрове перетворення вторинного струму, математичну обробку миттєвих поточних значень вимірюваного струму і видавання результатів до пристрою вимірювання та релейного захисту, який відрізняється тим, що вимірювання миттєвих значень вторинного струму здійснюють через малі рівні проміжки часу, миттєві поточні...
Спосіб вимірювання віброзміщень та пристрій для його реалізації
Номер патенту: 30843
Опубліковано: 15.11.2002
Автор: Сікора Любомир Степанович
МПК: G01B 11/00, G01B 9/00, G01H 9/00
Мітки: спосіб, пристрій, реалізації, віброзміщень, вимірювання
Формула / Реферат:
1. Спосіб вимірювання віброзміщень, який включає формування світлового променя, спрямування його на об'єкт вимірювання, проеціювання його у вигляді світлового знака на багатоканальний просторово розподілений в заданому геометричному базисі фотоприймач після відбиття його від поверхні об'єкта вимірювання, перетворення його в електричний сигнал, підсилення його та формування з нього сигналів, які відповідають віброзміщенню об'єкта вимірювання,...
Спосіб вимірювання швидкості потоку і пристрій для його реалізації
Номер патенту: 41580
Опубліковано: 17.09.2001
Автор: Землянський Володимир Михайлович
Мітки: швидкості, вимірювання, пристрій, реалізації, спосіб, потоку
Формула / Реферат:
1. Спосіб вимірювання швидкості потоку шляхом зондування рухомого потоку лазерним пучком і виділення для двох напрямків прийому розсіяних пучків з наступним їх оптичним змішуванням на фотокатоді квадратичного детектора, який відрізняється тим, що потік зондують двома лазерними пучками з взаємоортогональними поляризаціями і різницею частот ΩМ, в кожному напрямі прийому виділяють два розсіяних пучки, що мають взаємоортогональні...
Попередній патент: Спосіб спорудження вертикального вентиляційного стовбура тунелю методом “raise-boring”
Наступний патент: Зубчатий вузол ланцюгового приводу
Випадковий патент: Спосіб вимірювання флуктуацій набігання фази і кутів приходу радіохвиль