Спосіб вимірювання швидкості потоку і пристрій для його реалізації
Формула / Реферат
1. Спосіб вимірювання швидкості потоку шляхом зондування рухомого потоку лазерним пучком і виділення для двох напрямків прийому розсіяних пучків з наступним їх оптичним змішуванням на фотокатоді квадратичного детектора, який відрізняється тим, що потік зондують двома лазерними пучками з взаємоортогональними поляризаціями і різницею частот ΩМ, в кожному напрямі прийому виділяють два розсіяних пучки, що мають взаємоортогональні поляризації, а перед оптичним змішуванням розсіяних пучків здійснюють спочатку для однієї з пар просторово поєднаних розсіяних пучків перетворення їх стану поляризації на взаємоортогональне і потім поляризаційну фільтрацію, а на виході детектора вимірюють частоту високочастотного сигналу пропорційну проекції вектора швидкості на геометричну суму векторів, один з яких рівний різниці хвильових векторів двох зондуючих пучків, а інший - різниці хвильових векторів двох розсіяних пучків.
2. Пристрій для вимірювання швидкості потоку, що складається з оптично узгоджених лазера, фокусуючого і збираючого об'єктивів, діафрагми з двома отворами, дзеркала, змішувача, що забезпечує просторове поєднання розсіяних пучків на фотокатоді блока фотоприймача, що складається з послідовно встановлених діафрагми, інтерференційного світлофільтра і фотоприймача, а також вимірювача доплерівської частоти, вхід якого сполучений з виходом фотоприймача, який відрізняється тим, що в нього додатково введені між лазером і фокусуючим об'єктивом світлоподільник і дзеркало, які формують два паралельних лазерних пучки симетричних і паралельних оптичній осі фокусуючого об'єктива, частотозсувний пристрій і півхвильова фазова пластина, розташованих на шляху одного з лазерних пучків, а також півхвильова фазова пластина на шляху однієї з пар розсіяних пучків і поляризаційний фільтр, встановлений на вході блока фотоприймача.
3. Пристрій по п.2, який відрізняється тим, що оптичні осі фокусуючого і збираючого об'єктивів співпадають, а відстань між двома отворами діафрагми, розташованими симетрично відносно оптичної осі схеми Oz в площині зондуючих пучків Oхz, рівна
![]()
причому оптична вісь резонатора лазера і оптична вісь блока фотоприймача розташовані в площині Oхz з протилежних сторін відносно оптичної осі схеми Oz, де F - фокусна відстань збираючого об'єктива, γ - кут між двома лазерними пучками.
4. Пристрій по п.3, який відрізняється тим, що відстань між двома отворами діафрагми рівна
![]() або
або ![]()
5. Пристрій по п.2, який відрізняється тим, що оптичні осі фокусуючого і збираючого об'єктивів співпадають, а відстань між двома отворами діафрагми, розташованими симетрично відносно оптичної осі схеми Oz в площині зондуючих пучків Oxz, вибирають з умови ![]() або
або ![]() , причому оптична вісь резонатора лазера і оптична вісь блокf фотоприймача розташовані в площині Oxz з однієї сторони відносно оптичної осі схеми Oz.
, причому оптична вісь резонатора лазера і оптична вісь блокf фотоприймача розташовані в площині Oxz з однієї сторони відносно оптичної осі схеми Oz.
6. Пристрій по п.2,3,4,5, який відрізняється тим, що змішувач виконаний у вигляді складової призми, наприклад, з світлоподільника і призми повного внутрішнього відбиття, яка забезпечує напрям на фотоприймач усього розсіяного випромінювання падаючого на вхід складової призми, а діафрагма перед фотоприймачем виконана з двома отворами.
Текст
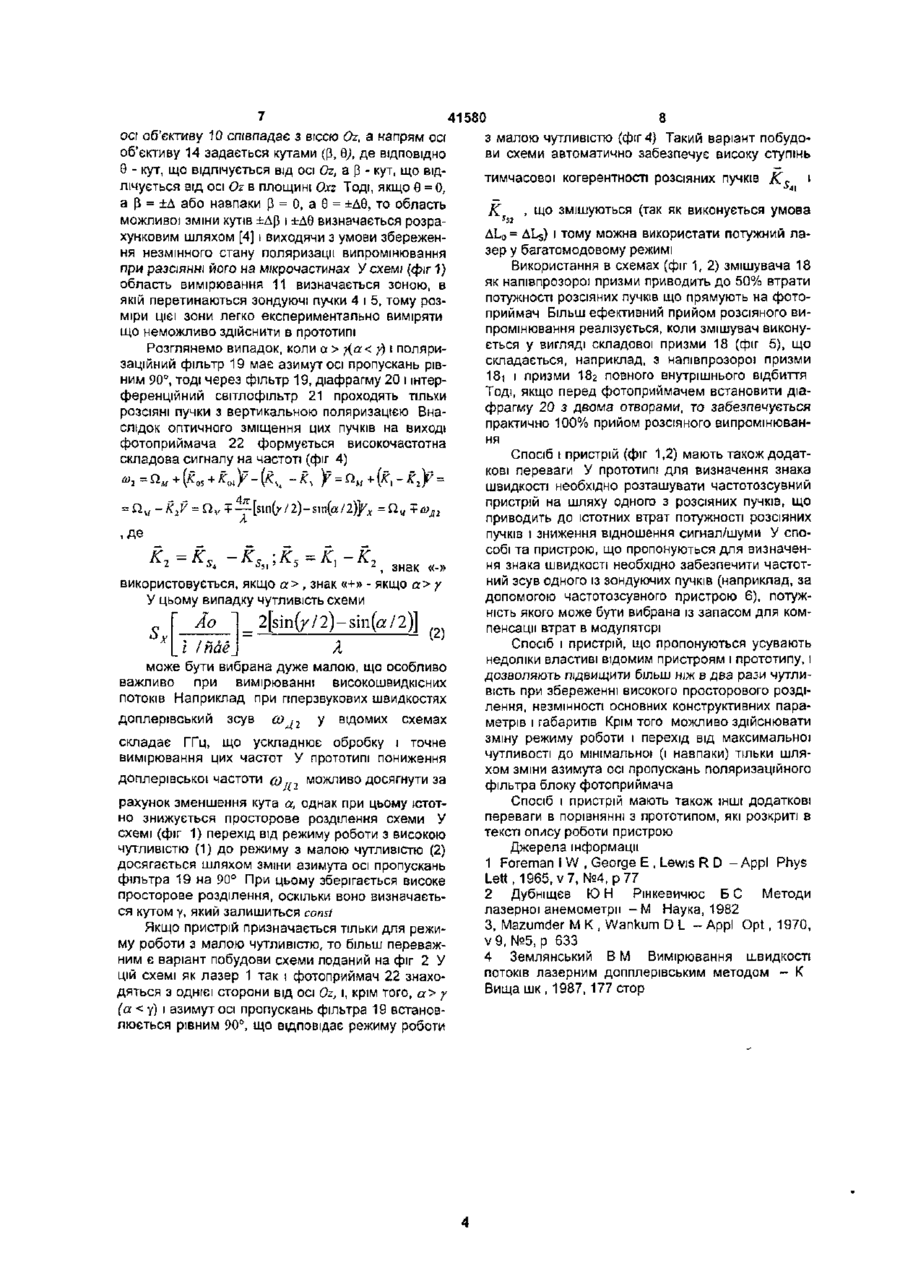
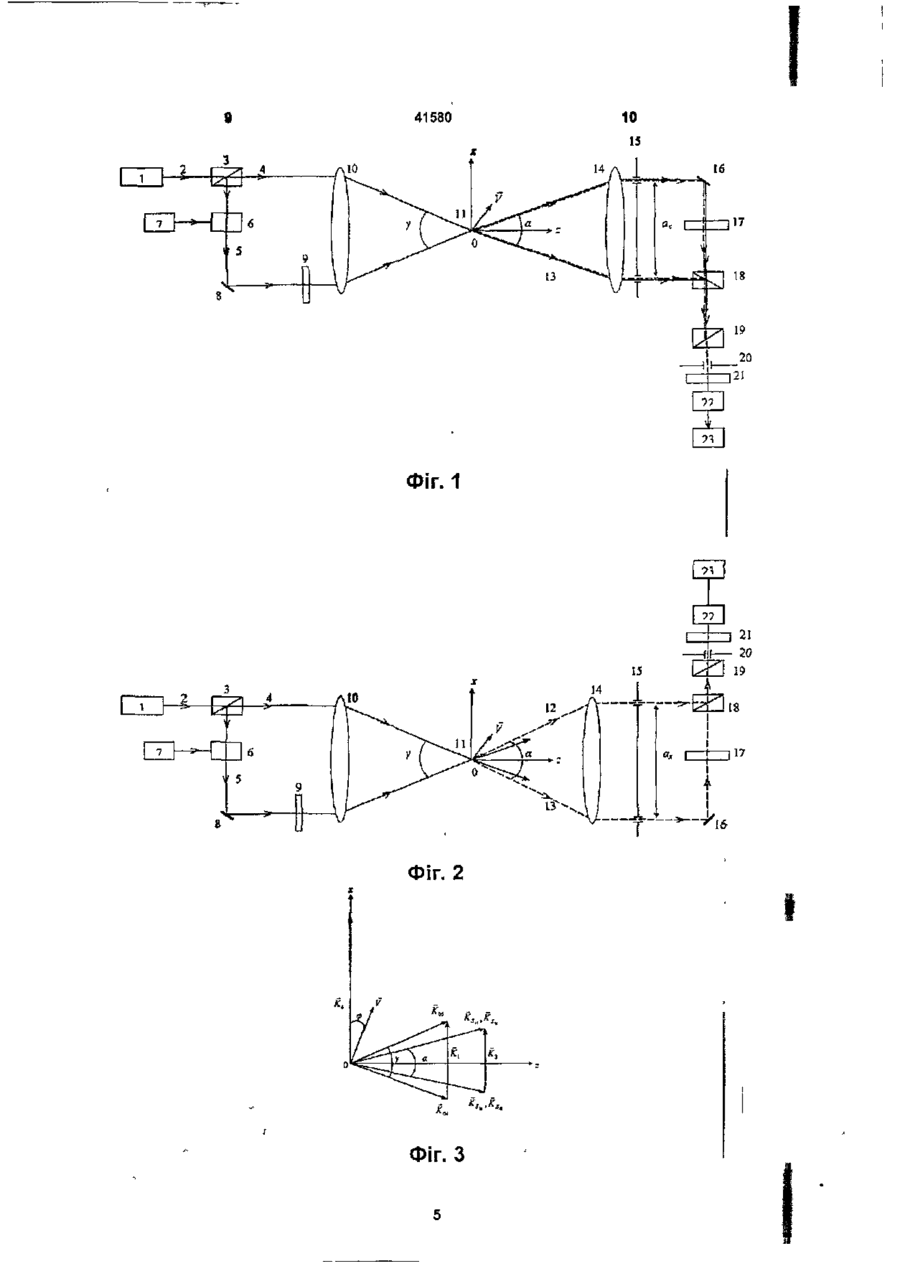
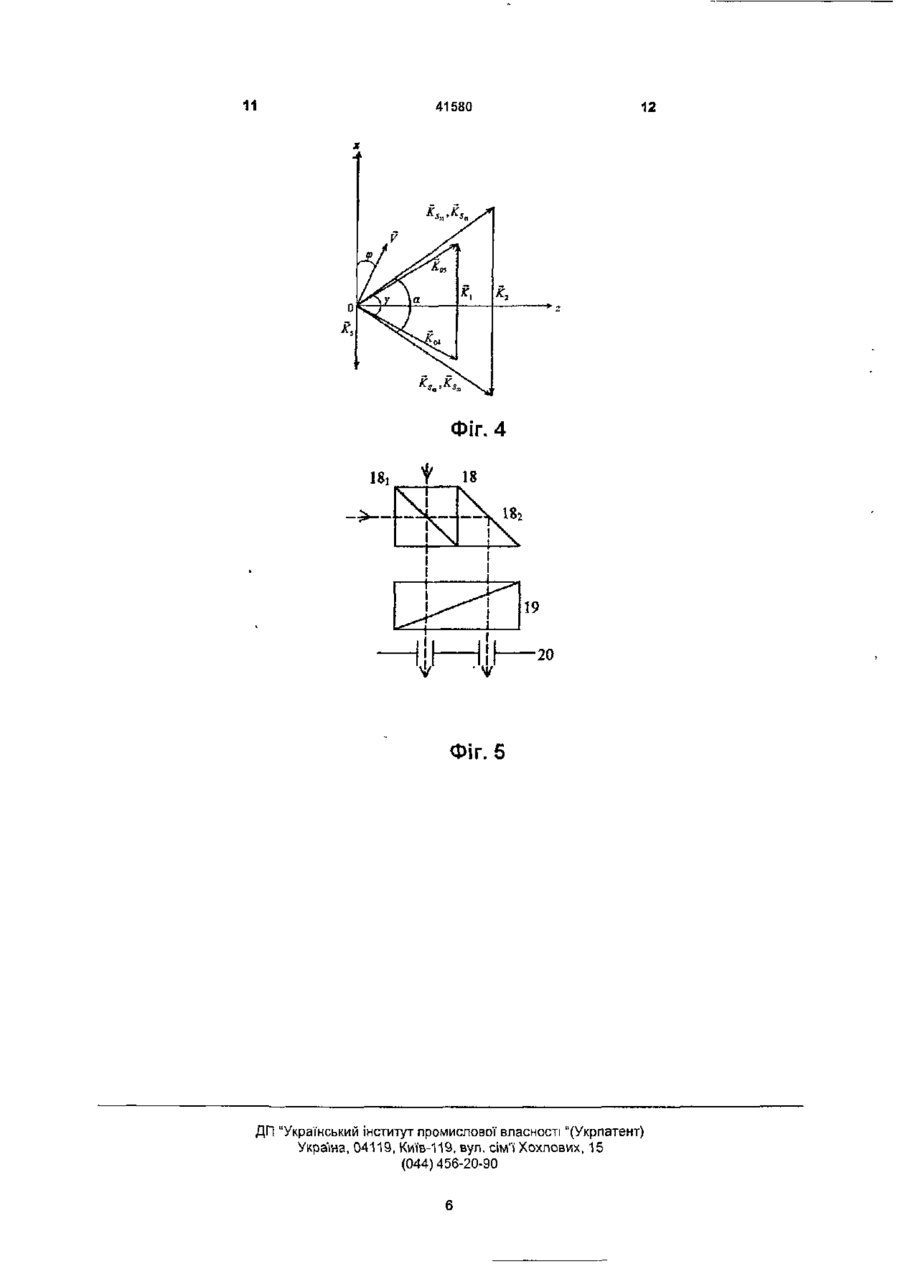
1. Спосіб вимірювання швидкості потоку шляхом зондування рухомого потоку лазерним пучком І виділення для двох напрямків прийому розсіяних пучків з наступним їх оптичним змішуванням на фотокатоді квадратичного детектора, який відрізняється тим, що потік зондують двома лазерними пучками з взаємоортогональними поляризаціями і різницею частот Ом, в кожному напрямі прийому виділяють два розсіяних пучки, що мають взаємоортогональні поляризації, а перед оптичним змішуванням розсіяних пучків здійснюють спочатку для однієї з пар просторово поєднаних розсіяних пучків перетворення Гх стану поляризації на взаємоортогональне і потім поляризаційну фільтрацію, а на виході детектора вимірюють частоту високочастотного сигналу пропорційну проекції вектора швидкості на геометричну суму векторів, один з яких рівний різниці хвипьових векторів двох зондуючих пучків, а інший - різниці хвипьових векторів двох розсіяних пучків. 2. Пристрій для вимірювання швидкості потоку, що складається з оптично узгоджених лазера, фокусуючого і збираючого об'єктивів, діафрагми з двома отворами, дзеркала, змішувача, що забезпечує просторове поєднання розсіяних пучків на фотокатоді блока фотоприймача, що складається з послідовно встановлених діафрагми, інтерференційного світлофільтра і фотоприймача, а також вимірювача доплерівськоі частоти, вхід якого спопучений з виходом фотоприймача, який відрізняється тим, що в нього додатково введені між лазером і фокусуючим об'єктивом світлоподільник і дзеркало, які формують два парапельних лазерних пучки симетричних і паралельних оптичній осі фокусую Винахід відноситься до вимірювальної техніки і може бути використаний для вимірювання швидкості потоків рідини або газу. Відомий спосіб вимірювання швидкості потоків [1], заснований на зондуванні лазерними пучками чого об'єктива, частотозсувний пристрій і півхвильова фазова пластина, розташованих на шляху одного з лазерних пучків, а також півхвильова фазова пластина на шляху однієї з пар розсіяних пучків і поляризаційний фільтр, встановлений на вході блока фотоприймача. 3. Пристрій по п.2, який відрізняється тим, що оптичні осі фокусуючого і збираючого об'єктивів співпадають, а відстань між двома отворами діафрагми, розташованими симетрично відносно оптичної осі схеми Oz в площині зондуючих пучків Oxz, рівна ах = 2 F t a n ( / / 2) , причому оптична вісь резонатора лазера І оптична вісь блока фотоприймача розташовані в площині Oxz з протилежних сторін відносно оптичної осі схеми Oz, де F - фокусна відстань збираючого об'єктива, у - кут між двома лазерними пучками. 4. Пристрій по п 3, який відрізняється тим, що відстань між двома отворами діафрагми рівна ах >2Ftan(//2) або ах 2F tan(y/2) або ах 2F гап(у/2} або ах < 2F tan(y/2) причому оптична вісь резонатора лазера і оптична вісь блок фотоприймача розташовані в ппощині Oxz з однієї сторони відносно оптичної осі схеми Oz. Крім того пристрій відмінний тим, що змішувач виконаний у вигляді складової' призми, наприклад, з світлодільника і призми повного внутрішнього відбиття, яка забезпечує напрям на фотоприймач усього розсіяного випромінювання падаючого на вхід складової призми, а діафрагма перед фотоприймачем виконана з двома отворами. На фіг. 1 представпена блок-схема пристрою, що реалізовує спосіб вимірювання швидкості потоку, на фіг 2 - блок-схема пристрою для вимірювання високошвидкісних потоків, на фіг. З і 4 - геометрія зондуючих і розсіяних пучків, відповідно для пристроїв, поданих на фіг 1 і 2, на фіг 5 - змішувач, що складається з напівпрозорої призми 18і І призми повного внутрішнього відбиття 18 2 . Пристрій (фіг. 1,2) містить оптичне узгоджені: лазер 1, випромінюючий вертикально поляризований пучок 2, розщинник 3, який ділить лазерний пучок 2 на два пучка 4 і 5 рівні по потужності; частотозсувний пристрій 6, підключений до генератора високої частоти 7; дзеркало 8; півхвильову фазову пластину 9; фокусуючий об'єктив 10, який фокусує два лазерних пучка в зону вимірювання 11 (місце перетину двох лазерних пучків під кутом у), 12 І 13 - розсіяне випромінювання, що збирається об'єктивом 14 під кутом а/2 до оптичної осі схеми OZ, діафрагму з двома отворами 15; дзеркало 16; півхвипьову фазову пластину 17; змішувач 18; поляризаційний фільтр 19; діафрагму 20; Інтерференційний світлофільтр 21; фотоприймач 22 і вимірювач доплерівської частоти 23 Пристрій, що реалізовує спосіб вимірювання швидкості потоку (фіг. 1) працює таким чином. Ла 41580 зер 1 випромінює потужний безперервний лазерний пучок 2 вертикальної поляризації, який ділиться розщинником 3 на два пучка 4 і 5 рівної інтенсивності Пучок 5 після проходження частотозсувного пристрою 6, підключеного до генератора високої частоти 7, зміщується по частоті на величину Q M і далі, відбившись від дзеркала 8, проходить півхвильову фазову пластинку 9, на виході якої лазерний пучок 5 має горизонтальну поляризацію і частоту G)0 + Q M І допомогою змішувача 18 і далі прямують на поляризаційний фільтр 19 Нехай поляризаційний фільтр 19 має азимут осі пропускань рівний 0°, тоді через фільтр 19, діафрагму 20 і інтерференційний світлофільтр 21 проходять тільки розсіяні пучки, що мають горизонтальні поляризації К Ks і Внаслідок оптичного змішення цих пучок на виході фотоприймача формується високочастотна складова сигналу на частоті — К? - різниці хвильових век торів розсіяних пучків І Внаслідок симетрії схеми (фіг 3) К4 паралельний осі Ох, тому в даному варіанті схема вимірює горизонтальну проекцію швидкості Vx = Vcosq) Чутливість схеми рівна S (1) (фіг 3), а від - хвильовим вектором К - рівний різниці хвильо вих векторів зондуючих пучків, X- довжина хвилі випромінювання лазера) Розсіяне випромінювання від пучка К04 +К04 S Гц м І сек _2[sin(^/2)+sin(a/2)] Л Якщо, наприклад, у < а то чутливість рівна ^ л , тобто в два і більше раз (якщо у< а) більше, ніж в прототипі при тому ж куті а Якщо у= « т а оптичні осі 10 і 15 співпадають, то в цьому випадку відстань між отворами діафрагми 15 вибирається рівною dx= 2F} ш(у/2), де F-\ - фокусна відстань об'єктиву 14 Зондуючі пучки 4 і 5 на вході поляризаційного фільтра 19 мають горизонтальні поляризації і тому вони не проходять через фільтр 19 на фотоприймач 23 Такий варіант побудови схеми дуже простий для юстировки, оскільки для цього досить забезпечити просторове поєднання хвильових векторів К і К5 на виході змішувача 18 У цьому випадку автоматично забезпечується просторове поєднання хвильових векторів розсіяних пучків на фотокатоді фотоприймача 22 Крім того в схемі забезпечується рівність оптичного ходу двох електромагнітних хвиль, що змішуються і Д І 0 = ALS . де AL0 - різниця оптичного хо ду між зондуючими пучками 4 і 5, ALS - різниця оптичного ходу МІЖ розсіяними пучками що змішуються виконання цієї умови дозволяє використати в схемі потужні лазери з малою довжиною когерентності Якщо в схемі (фіг X) у а, то схема (фіг 1) може також працювати, коли оптична вісь збираючого обективу складає деякий кут з оптичною віссю фокусуючого об'єктиву Нехай, наприклад, в системі координат Oxyz напрям оптичної оа об'єктиву 10 співпадає з віссю Oz, а напрям осі об'єктиву 14 задається кутами (Р, 0;, де ВІДПОВІДНО G - кут, що відлічується від осі Oz, a P - кут, що відлічується від ОСІ Oz в площині Oxz Тоді, ЯКЩО 0 = 0, а р = ±д або навпаки р = 0, а 0 = ±Д6, то область можливої зміни кутів ±Др і ±ДЭ визначається розрахунковим шляхом [4] і виходячи з умови збереження незмінного стану поляризації випромінювання при разсіянні його на мікрочастинах У схемі (фіг 1) область вимірювання 11 визначається зоною, в якій перетинаються зондуючі пучки 4 і 5, тому розміри цієї зони легко експериментально виміряти що неможливо здійснити в прототипі 41580 8 3 малою чутливістю (фіг 4} Такий варіант побудови схеми автоматично забезпечує високу ступінь Розглянемо випадок, коли а > у(а Sii» 5 і 2 1 знак «-» використовується, якщо ог>, знак «+» - якщо а> у У цьому випадку чутливість схеми _2[sin(//2)-sin(a/2)] Ао Я І пае (2) може бути вибрана дуже малою, що особливо важливо при вимірюванні високошвидкісних потоків Наприклад при гіперзвукових швидкостях доплерівський зсув CO j 2 У ВІДОМИХ схемах складає ГҐц, що ускладнює обробку і точне вимірювання цих частот У прототипі пониження доплерівської частоти сокг можливо досягнути за рахунок зменшення кута а, однак при цьому істотно знижується просторове розділення схеми У схемі (фіг 1) перехід від режиму роботи з високою чутливістю (1) до режиму з малою чутливістю (2) досягається шляхом зміни азимута осі пропускань фільтра 19 на 90° При цьому зберігається високе просторове розділення, оскільки воно визначається кутом у, який залишиться const Якщо пристрій призначається тільки для режиму роботи з малою чутливістю, то більш переважним є варіант побудови схеми поданий на фіг 2 У цій схемі як лазер 1 так і фотоприймач 22 знаходяться з однієї сторони від осі Oz, і, крім того, а> у (а 5 ФІГ. 1 21 20 18 17 Фіг. 2 Фіг. З 11 41580 12 Фіг. 5 ДП "Український інститут промислової власності "(Укрпатент) Україна, 04119, Київ-119, вул. сім"і Хохпових, 15 (044) 456-20-90
ДивитисяДодаткова інформація
Автори англійськоюZemlyanskyi Volodymyr Mykhaylovych
Автори російськоюЗемлянский Владимир Михайлович
МПК / Мітки
Мітки: вимірювання, потоку, реалізації, спосіб, швидкості, пристрій
Код посилання
<a href="https://ua.patents.su/6-41580-sposib-vimiryuvannya-shvidkosti-potoku-i-pristrijj-dlya-jjogo-realizaci.html" target="_blank" rel="follow" title="База патентів України">Спосіб вимірювання швидкості потоку і пристрій для його реалізації</a>
Спосіб вимірювання ступеня просторової когерентності лазерного випромінювання та пристрій для його реалізації
Номер патенту: 40886
Опубліковано: 15.08.2001
Автори: Чудесов Олександр Павлович, Землянський Володимир Михайлович
МПК: G01J 9/00, H01S 3/094, H01S 3/00
Мітки: ступеня, спосіб, пристрій, випромінювання, реалізації, вимірювання, когерентності, лазерного, просторової
Формула / Реферат:
1. Спосіб вимірювання ступеня просторової когерентності лазерного випромінювання шляхом виділення з розширеного лазерного пучка двох лазерних пучків, рівних за інтенсивністю та узгоджених за поляризацією, який відрізняється тим, що в зоні вимірювання, утвореній в результаті перетину цих двох лазерних пучків під кутом g, формують інтерференційну картину, що біжить з постійною частотою, період якої не залежить від відстані між двома виділеними...
Пристрій для вимірювання швидкості та температури потоку
Номер патенту: 30477
Опубліковано: 15.11.2000
Автори: Шигера Ігор Юрійович, Івахів Орест Васильович
МПК: G01P 5/10
Мітки: пристрій, потоку, температури, швидкості, вимірювання
Формула / Реферат:
Пристрій для вимірювання швидкості та температури потоку, що містить високостабільний постійний резистор, з'єднаний нижнім виводом через перетворювач швидкості-температури з землею та виходом ключа, вхід керування якого з'єднано з виходом генератора опорної частоти, перший і другий підсилювачі змінного струму, відрізняється тим, що в нього додатково введено джерело змінного струму, джерело постійного струму, диференційний підсилювач,...
Спосіб вимірювання швидкості газового потоку
Номер патенту: 33552
Опубліковано: 15.02.2001
Автори: Лопатенко Лілія Михайлівна, Лопатенко Сергій Васильович
Мітки: вимірювання, газового, спосіб, швидкості, потоку
Текст:
...зв'язок швидкості газового потоку з різницею поте нціалів на електродах 4, 5. За допомогою графіка швидкість газового потоку визначають за даними вольтметра 8 у момент, коли сила струму у колі дорівнює нулю. Пропонований спосіб дозволяє збільшити ефективність процесу вимірювання швидкості газових потоків. Крім того, на відміну від відомих способів, пропонований спосіб не містить операцію вимірювання напруги на електродах, величина якої...
Спосіб електричного вимірювання швидкості потоку рідини
Номер патенту: 30051
Опубліковано: 15.11.2000
Автори: Смирнитський Борис Васильович, Смирнитська Майя Борисівна
Мітки: швидкості, спосіб, рідини, електричного, потоку, вимірювання
Формула / Реферат:
Спосіб електричного вимірювання швидкості (витрат) потоку рідини шляхом виміряння і відношення струмів, що протікають у рідині, яка рухається у міжелектродному просторі, який відрізняється тим, що одночасно вимірюють в одному об'ємі рідини постійний струм, пропорційний провідності і швидкості потоку рідини, і змінний струм, пропорційний провідності, порівнюючи ці струми, визначають швидкість (витрати) потоку рідини.
Спосіб ультразвукового локаційного вимірювання відстані і пристрій для його реалізації
Номер патенту: 39336
Опубліковано: 15.06.2001
Автори: Гнітецька Тетяна Віталіївна, Гнітецький Віталій Анатолійович
МПК: G01F 23/296, G01F 23/28
Мітки: відстані, локаційного, пристрій, ультразвукового, спосіб, реалізації, вимірювання
Формула / Реферат:
1. Спосіб ультразвукового локаційного вимірювання відстані, що включає випромінення і прийом ультразвукових зондуючих імпульсів, підсилення прийнятих імпульсів, формування вимірюваного інтервалу, формування підрахункових імпульсів, цифрове перетворення вимірюваного інтервалу за допомогою підрахункових імпульсів, усереднення і цифрову індикацію віддалі від акустичного датчика до вимірюваного рівня, який відрізняється тим, що формування...
Попередній патент: Пристрій для температурного захисту вибухозахищеного електродвигуна
Наступний патент: Пристрій обчислення швидкого перетворення фур’є
Випадковий патент: Спосіб підвищення продуктивності та якості продукції відгодівельної худоби