Спосіб вимірювання віброзміщень та пристрій для його реалізації


Формула / Реферат
1. Спосіб вимірювання віброзміщень, який включає формування світлового променя, спрямування його на об'єкт вимірювання, проеціювання його у вигляді світлового знака на багатоканальний просторово розподілений в заданому геометричному базисі фотоприймач після відбиття його від поверхні об'єкта вимірювання, перетворення його в електричний сигнал, підсилення його та формування з нього сигналів, які відповідають віброзміщенню об'єкта вимірювання, який відрізняється тим, що формують когерентний світловий промінь у вигляді імпульсів з заданою частотою проходження, а світловому знаку оптичного променя лазера надають подушкоподібну форму з рівномірним розподілом інтенсивності оптичного променя по площі знака, а електричний сигнал з фотоприймача розподіляють по двох каналах, в яких сигнали фільтрують і оптимізують пропорційно максимальній величині світлової енергії шляхом зарядки електричного конденсатора заданої ємності в послідовному резонансному контурі, узгоджуючи параметри резонансного контуру з енергією лазерного імпульсу, а після підсилення повторно фільтрують і підсилюють з наступною фільтрацією по несучій частоті, обмежують його по максимуму, проводять ковзне інтегрування, підсумовування та віднімання сигналів з двох каналів, проводять маштабування отриманих сигналів і формують сигнали, пропорційні величині зміщення об'єкта від вихідного положення об'єкта-вимірювання, і вимірюють їх, а по порогових значеннях сигналів, пропорційних зміщенню координат об'єкта в точці зондування, вироблюють команду керування.
2. Пристрій для вимірювання віброзміщень, який включає послідовно встановлені і оптично зв'язані джерело світла, оптичну систему та формувач форми світлового знака, відбиваючу поверхню, встановлену на об'єкті вимірювання, двокоординатний фотоприймач, який електричне . зв'язаний з блоком обробки сигналів, що містить підсилювач та суматор, який відрізняється тим, що джерело світла містить напівпровідниковий лазер, блок живлення якого з'єднаний з задавальним генератором, який з'єднаний із напівпровідниковим лазером, а блок обробки сигналів містить два канали, кожен з яких містить послідовно з'єднані оптимальний енергетичний смуговий фільтр, підсилювач, смуговий фільтр, другий підсилювач, обмежувач рівня, третій підсилювач, детектор обвідної, ковзний робастний інтегратор, суматор, причому вхід суматора першого каналу з'єднаний з виходом ковзного робастного інтегратора другого каналу, а інверсний вхід суматора другого каналу з'єднаний з виходом ковзного робастного інтегратора першого каналу, вихід суматора першого каналу з'єднаний з індикатором інтенсивності променя, а вихід суматора другого каналу з'єднаний з індикатором зміщення і входом масштабу вального підсилювача, вихід якого з'єднаний з послідовно увімкненими робастним фільтром, блоком формування образу динамічної ситуації, стохастичним процесором та блоком формування команд, крім того в пристрій додатково введено блок оперативної пам'яті, виконавчий механізм та інтерфейс, причому вхід блока оперативної пам'яті з'єднаний з першим виходом блока обробки сигналів, другий і третій виходи якого з'єднані з входами інтерфейсу, а вихід блока оперативної пам'яті з'єднаний з виконавчим механізмом.
Текст
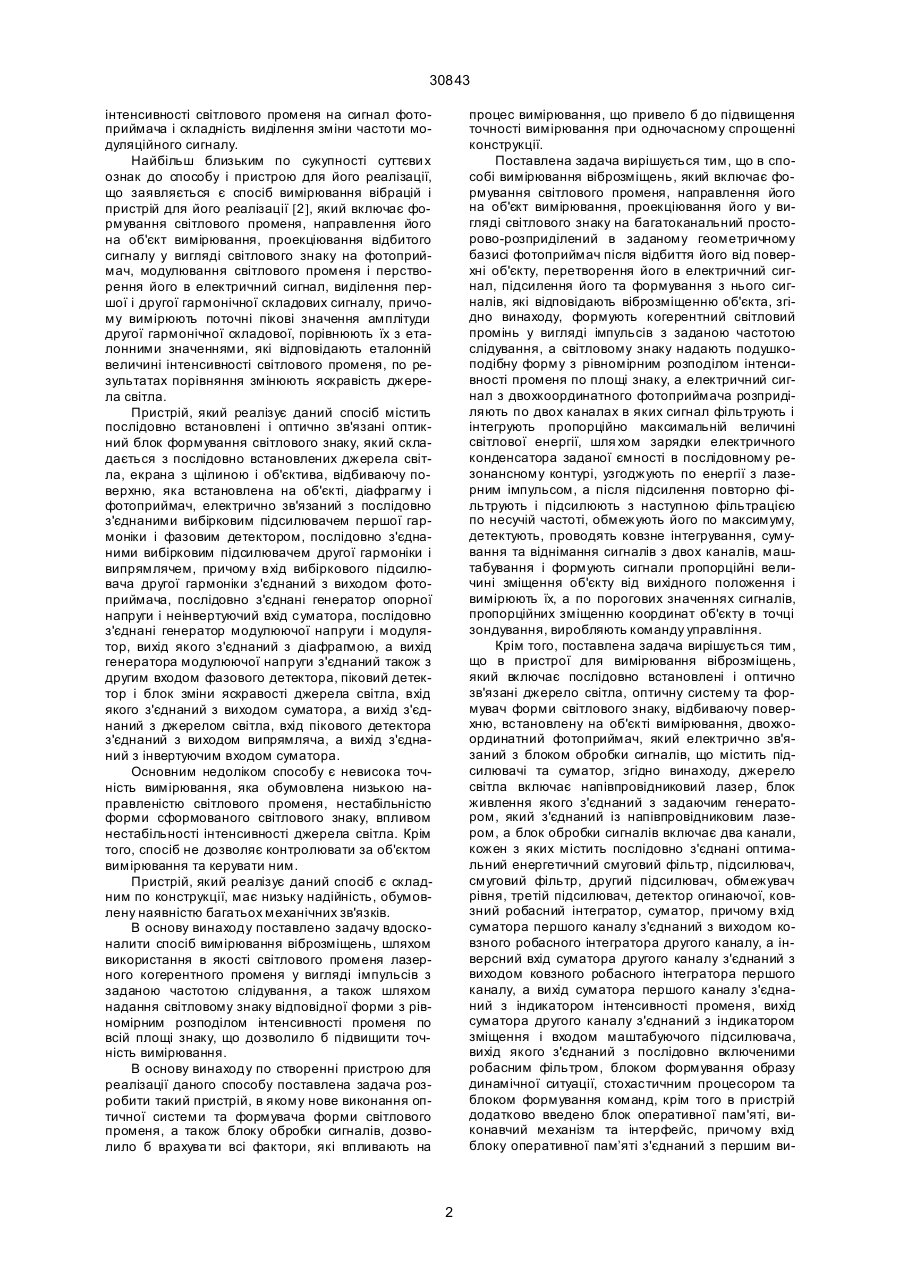
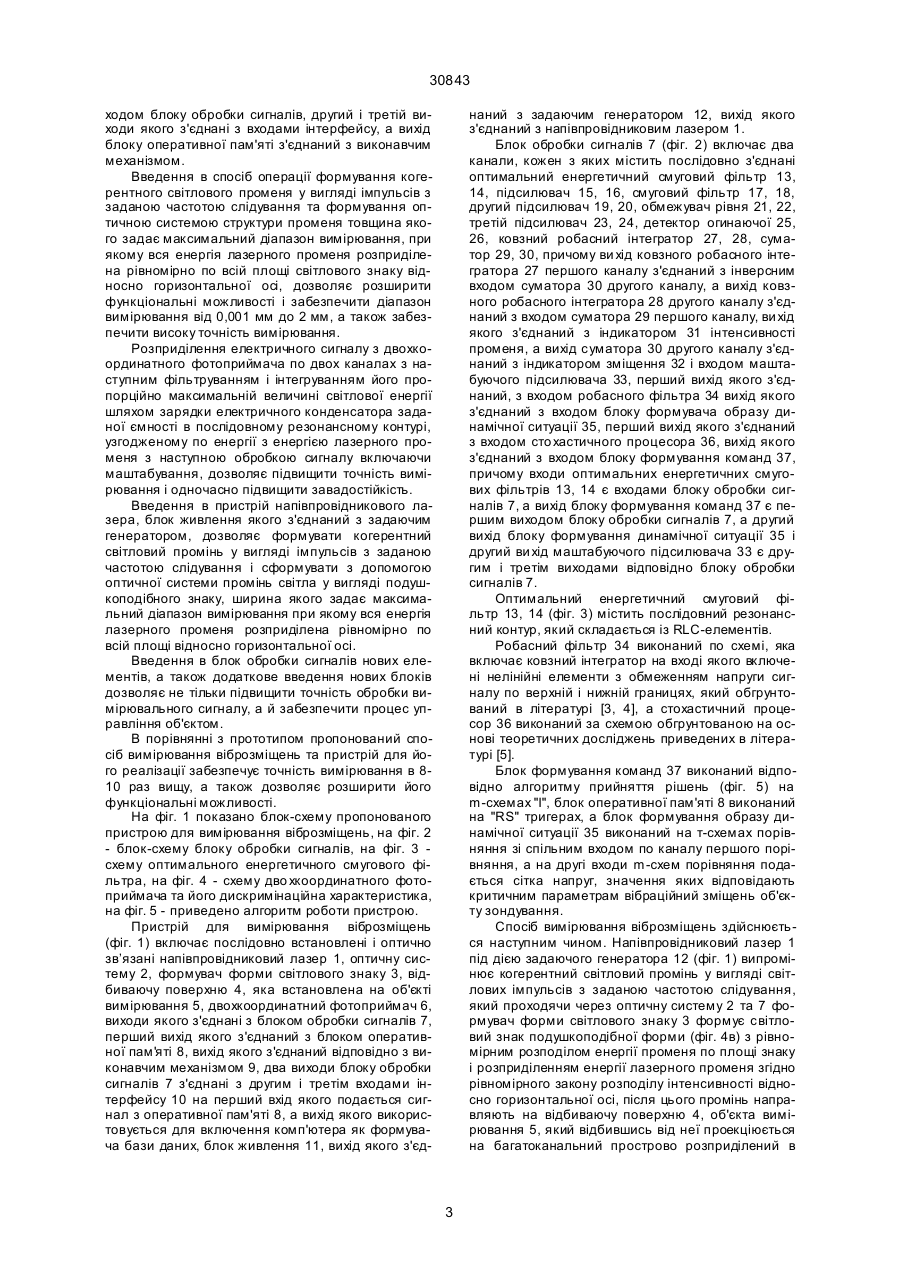
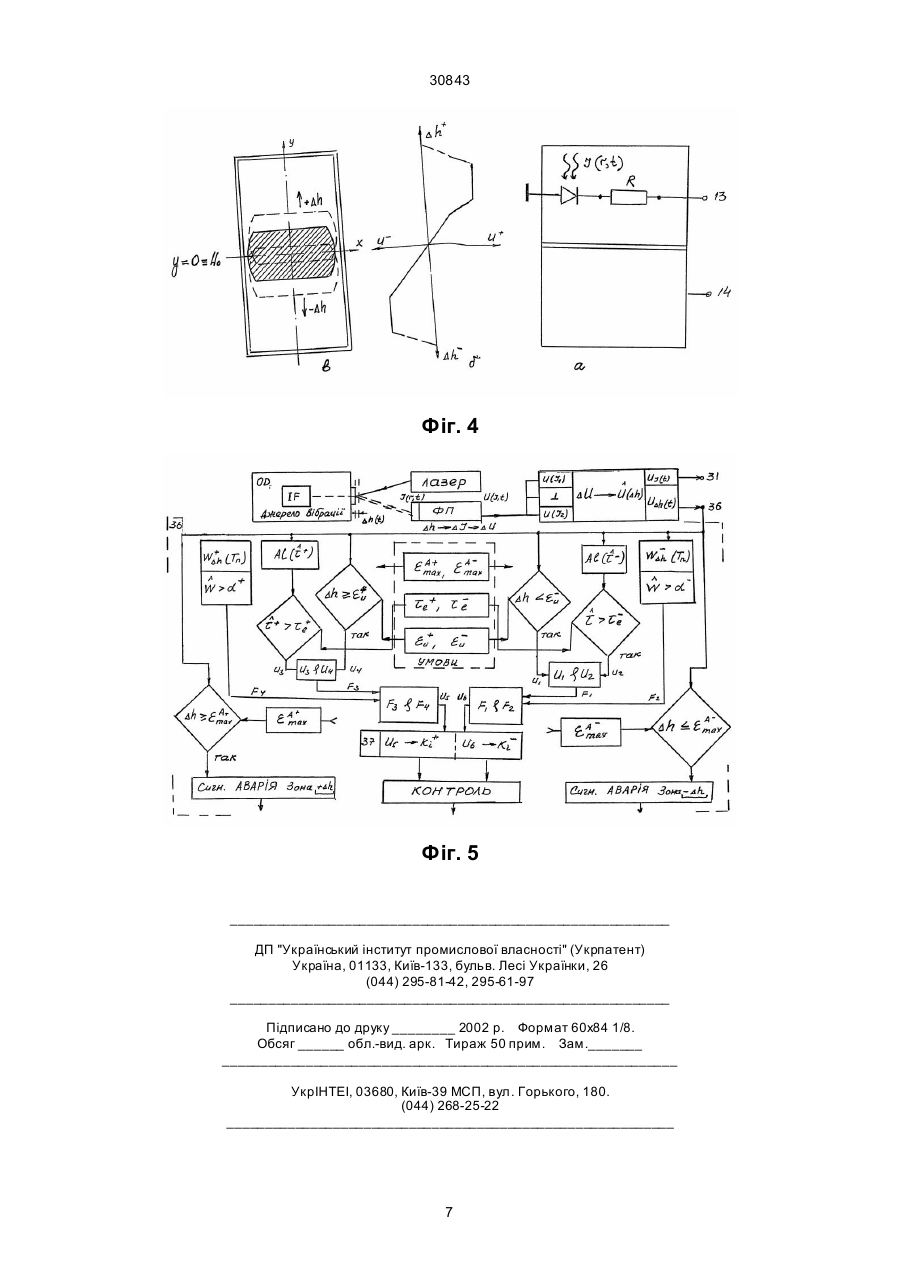
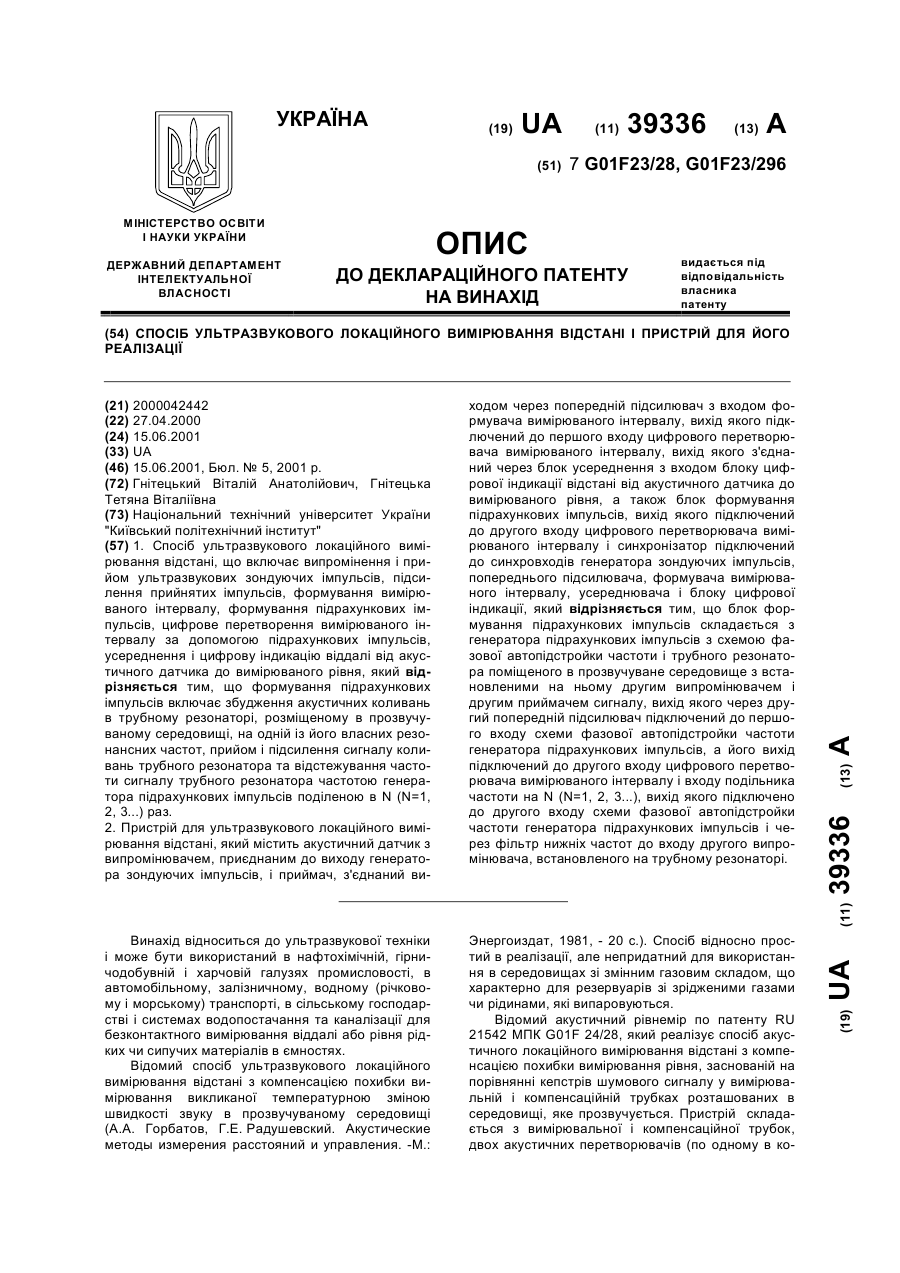
1. Спосіб вимірювання віброзміщень, який включає формування світлового променя, направлення його на об'єкт вимірювання, проекціювання його у вигляді світлового знаку на багатоканальний просторово розприділений в заданому геометричному базисі фотоприймач після відбиття його від поверхні об'єкту вимірювання, перетворення його в електричний сигнал, підсилення його та формування з нього сигналів, які відповідають віброзміщенню об'єкта вимірювання, відрізняється тим, що формують когерентний світловий промінь у ви гляді імпульсів з заданою частотою слідування, а світловому знаку оптичного променя лазера надають подушкоподібну форму з рівномірним розподілом інтенсивності оптичного променя по площі знаку, а електричний сигнал з фотоприймача розприділяють по двох каналах в яких сигнали фільтрують і оптимізують пропорційно максимальній величині світлової енергії, шляхом зарядки електричного конденсатора заданої ємності в послідовному резонансному контурі, узгоджуючи параметри резонансного контуру з енергію лазерного імпульсу, а після підсилення повторно фільтрують і підсилюють з наступною фільтрацією по несучій частоті, обмежують його по максимуму, проводять ковзне інтегрування, сумування та віднімання сигналів з двох каналів, проводять маштабування отриманих сигналів і формують сигнали пропорційні величині зміщення об'єкту від вихідного положення об'єкту вимірювання і вимірюють їх, а по порогових значеннях сигналів, пропорційних A (54) СПОСІБ ВИМІРЮВАННЯ ВІБРОЗМІЩЕНЬ ТА ПРИСТРІЙ ДЛЯ ЙОГО РЕАЛІЗ АЦІЇ 30843 інтенсивності світлового променя на сигнал фотоприймача і складність виділення зміни частоти модуляційного сигналу. Найбільш близьким по сукупності суттєви х ознак до способу і пристрою для його реалізації, що заявляється є спосіб вимірювання вібрацій і пристрій для його реалізації [2], який включає формування світлового променя, направлення його на об'єкт вимірювання, проекціювання відбитого сигналу у вигляді світлового знаку на фотоприймач, модулювання світлового променя і перстворення його в електричний сигнал, виділення першої і другої гармонічної складових сигналу, причому вимірюють поточні пікові значення амплітуди другої гармонічної складової, порівнюють їх з еталонними значеннями, які відповідають еталонній величині інтенсивності світлового променя, по результатах порівняння змінюють яскравість джерела світла. Пристрій, який реалізує даний спосіб містить послідовно встановлені і оптично зв'язані оптикний блок формування світлового знаку, який складається з послідовно встановлених джерела світла, екрана з щілиною і об'єктива, відбиваючу поверхню, яка встановлена на об'єкті, діафрагму і фотоприймач, електрично зв'язаний з послідовно з'єднаними вибірковим підсилювачем першої гармоніки і фазовим детектором, послідовно з'єднаними вибірковим підсилювачем другої гармоніки і випрямлячем, причому вхід вибіркового підсилювача другої гармоніки з'єднаний з виходом фотоприймача, послідовно з'єднані генератор опорної напруги і неінвертуючий вхід суматора, послідовно з'єднані генератор модулюючої напруги і модулятор, вихід якого з'єднаний з діафрагмою, а вихід генератора модулюючої напруги з'єднаний також з другим входом фазового детектора, піковий детектор і блок зміни яскравості джерела світла, вхід якого з'єднаний з виходом суматора, а вихід з'єднаний з джерелом світла, вхід пікового детектора з'єднаний з виходом випрямляча, а вихід з'єднаний з інвертуючим входом суматора. Основним недоліком способу є невисока точність вимірювання, яка обумовлена низькою направленістю світлового променя, нестабільністю форми сформованого світлового знаку, впливом нестабільності інтенсивності джерела світла. Крім того, спосіб не дозволяє контролювати за об'єктом вимірювання та керувати ним. Пристрій, який реалізує даний спосіб є складним по конструкції, має низьку надійність, обумовлену наявністю багатьох механічних зв'язків. В основу винаходу поставлено задачу вдосконалити спосіб вимірювання віброзміщень, шляхом використання в якості світлового променя лазерного когерентного променя у вигляді імпульсів з заданою частотою слідування, а також шляхом надання світловому знаку відповідної форми з рівномірним розподілом інтенсивності променя по всій площі знаку, що дозволило б підвищити точність вимірювання. В основу винаходу по створенні пристрою для реалізації даного способу поставлена задача розробити такий пристрій, в якому нове виконання оптичної системи та формувача форми світлового променя, а також блоку обробки сигналів, дозволило б врахува ти всі фактори, які впливають на процес вимірювання, що привело б до підвищення точності вимірювання при одночасному спрощенні конструкції. Поставлена задача вирішується тим, що в способі вимірювання віброзміщень, який включає формування світлового променя, направлення його на об'єкт вимірювання, проекціювання його у вигляді світлового знаку на багатоканальний просторово-розприділений в заданому геометричному базисі фотоприймач після відбиття його від поверхні об'єкту, перетворення його в електричний сигнал, підсилення його та формування з нього сигналів, які відповідають віброзміщенню об'єкта, згідно винаходу, формують когерентний світловий промінь у вигляді імпульсів з заданою частотою слідування, а світловому знаку надають подушкоподібну форму з рівномірним розподілом інтенсивності променя по площі знаку, а електричний сигнал з двохкоординатного фотоприймача розприділяють по двох каналах в яких сигнал фільтрують і інтегрують пропорційно максимальній величині світлової енергії, шля хом зарядки електричного конденсатора заданої ємності в послідовному резонансному контурі, узгоджують по енергії з лазерним імпульсом, а після підсилення повторно фільтрують і підсилюють з наступною фільтрацією по несучій частоті, обмежують його по максимуму, детектують, проводять ковзне інтегрування, сумування та віднімання сигналів з двох каналів, маштабування і формують сигнали пропорційні величині зміщення об'єкту від вихідного положення і вимірюють їх, а по порогових значеннях сигналів, пропорційних зміщенню координат об'єкту в точці зондування, виробляють команду управління. Крім того, поставлена задача вирішується тим, що в пристрої для вимірювання віброзміщень, який включає послідовно встановлені і оптично зв'язані джерело світла, оптичну систему та формувач форми світлового знаку, відбиваючу поверхню, встановлену на об'єкті вимірювання, двохкоординатний фотоприймач, який електрично зв'язаний з блоком обробки сигналів, що містить підсилювачі та суматор, згідно винаходу, джерело світла включає напівпровідниковий лазер, блок живлення якого з'єднаний з задаючим генератором, який з'єднаний із напівпровідниковим лазером, а блок обробки сигналів включає два канали, кожен з яких містить послідовно з'єднані оптимальний енергетичний смуговий фільтр, підсилювач, смуговий фільтр, другий підсилювач, обмежувач рівня, третій підсилювач, детектор огинаючої, ковзний робасний інтегратор, суматор, причому вхід суматора першого каналу з'єднаний з виходом ковзного робасного інтегратора другого каналу, а інверсний вхід суматора другого каналу з'єднаний з виходом ковзного робасного інтегратора першого каналу, а вихід суматора першого каналу з'єднаний з індикатором інтенсивності променя, вихід суматора другого каналу з'єднаний з індикатором зміщення і входом маштабуючого підсилювача, вихід якого з'єднаний з послідовно включеними робасним фільтром, блоком формування образу динамічної ситуації, стохастичним процесором та блоком формування команд, крім того в пристрій додатково введено блок оперативної пам'яті, виконавчий механізм та інтерфейс, причому вхід блоку оперативної пам’яті з'єднаний з першим ви 2 30843 ходом блоку обробки сигналів, другий і третій виходи якого з'єднані з входами інтерфейсу, а вихід блоку оперативної пам'яті з'єднаний з виконавчим механізмом. Введення в спосіб операції формування когерентного світлового променя у вигляді імпульсів з заданою частотою слідування та формування оптичною системою структури променя товщина якого задає максимальний діапазон вимірювання, при якому вся енергія лазерного променя розприділена рівномірно по всій площі світлового знаку відносно горизонтальної осі, дозволяє розширити функціональні можливості і забезпечити діапазон вимірювання від 0,001 мм до 2 мм, а також забезпечити високу точність вимірювання. Розприділення електричного сигналу з двохкоординатного фотоприймача по двох каналах з наступним фільтруванням і інтегруванням його пропорційно максимальній величині світлової енергії шляхом зарядки електричного конденсатора заданої ємності в послідовному резонансному контурі, узгодженому по енергії з енергією лазерного променя з наступною обробкою сигналу включаючи маштабування, дозволяє підвищити точність вимірювання і одночасно підвищити завадостійкість. Введення в пристрій напівпровідникового лазера, блок живлення якого з'єднаний з задаючим генератором, дозволяє формувати когерентний світловий промінь у вигляді імпульсів з заданою частотою слідування і сформувати з допомогою оптичної системи промінь світла у вигляді подушкоподібного знаку, ширина якого задає максимальний діапазон вимірювання при якому вся енергія лазерного променя розприділена рівномірно по всій площі відносно горизонтальної осі. Введення в блок обробки сигналів нових елементів, а також додаткове введення нових блоків дозволяє не тільки підвищити точність обробки вимірювального сигналу, а й забезпечити процес управління об'єктом. В порівнянні з прототипом пропонований спосіб вимірювання віброзміщень та пристрій для його реалізації забезпечує точність вимірювання в 810 раз вищу, а також дозволяє розширити його функціональні можливості. На фіг. 1 показано блок-схему пропонованого пристрою для вимірювання віброзміщень, на фіг. 2 - блок-схему блоку обробки сигналів, на фіг. 3 схему оптимального енергетичного смугового фільтра, на фіг. 4 - схему дво хкоординатного фотоприймача та його дискримінаційна характеристика, на фіг. 5 - приведено алгоритм роботи пристрою. Пристрій для вимірювання віброзміщень (фіг. 1) включає послідовно встановлені і оптично зв’язані напівпровідниковий лазер 1, оптичну систему 2, формувач форми світлового знаку 3, відбиваючу поверхню 4, яка встановлена на об'єкті вимірювання 5, двохкоординатний фотоприймач 6, виходи якого з'єднані з блоком обробки сигналів 7, перший вихід якого з'єднаний з блоком оперативної пам'я ті 8, вихід якого з'єднаний відповідно з виконавчим механізмом 9, два виходи блоку обробки сигналів 7 з'єднані з другим і третім входами інтерфейсу 10 на перший вхід якого подається сигнал з оперативної пам'яті 8, а вихід якого використовується для включення комп'ютера як формувача бази даних, блок живлення 11, вихід якого з'єд наний з задаючим генератором 12, вихід якого з'єднаний з напівпровідниковим лазером 1. Блок обробки сигналів 7 (фіг. 2) включає два канали, кожен з яких містить послідовно з'єднані оптимальний енергетичний смуговий фільтр 13, 14, підсилювач 15, 16, смуговий фільтр 17, 18, другий підсилювач 19, 20, обмежувач рівня 21, 22, третій підсилювач 23, 24, детектор огинаючої 25, 26, ковзний робасний інтегратор 27, 28, суматор 29, 30, причому ви хід ковзного робасного інтегратора 27 першого каналу з'єднаний з інверсним входом суматора 30 другого каналу, а вихід ковзного робасного інтегратора 28 другого каналу з'єднаний з входом суматора 29 першого каналу, ви хід якого з'єднаний з індикатором 31 інтенсивності променя, а вихід суматора 30 другого каналу з'єднаний з індикатором зміщення 32 і входом маштабуючого підсилювача 33, перший вихід якого з'єднаний, з входом робасного фільтра 34 вихід якого з'єднаний з входом блоку формувача образу динамічної ситуації 35, перший вихід якого з'єднаний з входом сто хастичного процесора 36, вихід якого з'єднаний з входом блоку формування команд 37, причому входи оптимальних енергетичних смугових фільтрів 13, 14 є входами блоку обробки сигналів 7, а вихід блоку формування команд 37 є першим виходом блоку обробки сигналів 7, а другий вихід блоку формування динамічної ситуації 35 і другий ви хід маштабуючого підсилювача 33 є другим і третім виходами відповідно блоку обробки сигналів 7. Оптимальний енергетичний смуговий фільтр 13, 14 (фіг. 3) містить послідовний резонансний контур, який складається із RLC-елементів. Робасний фільтр 34 виконаний по схемі, яка включає ковзний інтегратор на вході якого включені нелінійні елементи з обмеженням напруги сигналу по верхній і нижній границях, який обгрунтований в літературі [3, 4], а стохастичний процесор 36 виконаний за схемою обгрунтованою на основі теоретичних досліджень приведених в літературі [5]. Блок формування команд 37 виконаний відповідно алгоритму прийняття рішень (фіг. 5) на m-схемах "І", блок оперативної пам'яті 8 виконаний на "RS" тригерах, а блок формування образу динамічної ситуації 35 виконаний на т-схемах порівняння зі спільним входом по каналу першого порівняння, а на другі входи m-схем порівняння подається сітка напруг, значення яких відповідають критичним параметрам вібраційний зміщень об'єкту зондування. Спосіб вимірювання віброзміщень здійснюється наступним чином. Напівпровідниковий лазер 1 під дією задаючого генератора 12 (фіг. 1) випромінює когерентний світловий промінь у вигляді світлових імпульсів з заданою частотою слідування, який проходячи через оптичну систему 2 та 7 формувач форми світлового знаку 3 формує світловий знак подушкоподібної форми (фіг. 4в) з рівномірним розподілом енергії променя по площі знаку і розприділенням енергії лазерного променя згідно рівномірного закону розподілу інтенсивності відносно горизонтальної осі, після цього промінь направляють на відбиваючу поверхню 4, об'єкта вимірювання 5, який відбившись від неї проекціюється на багатоканальний прострово розприділений в 3 30843 заданому геометричному базисі двохкоординатний фотоприймач 6, в якому оптичний промінь, що несе в собі інформацію про зміни координат об'єкту вимірювання 5 перетворюється в електричний сигнал пропорційний інтенсивності і зміщенню оптичного променя відносно об'єкту вимірювання 5. Плоска двохкоординатна матриця фотоприймача 6 (фіг. 4а) є просторовим дискримінатором, який визначає положення центру густини потужності оптичного променя лазера, відбитого від відбиваючої поверхні 4 об'єкту вимірювання 5. Зміна положення об'єкту вимірювання відносно вихідного положення приводить до зміщення відбитого променя відносно координат плоскої двохкоординатної матриці фотоприймача 6, яка характеризується відповідною дискримінаційною характеристикою (фіг. 4б). На виході двохкоординатного фотоприймача 6 формується електричний сигнал в кожному каналі, в залежності від інтенсивності і площі відбитого променя, який падає на матрицю двохкоординатного приймача 6. Електричний сигнал з двохкоординатного фотоприймача 6 поступає на входи оптимальних енергетичних смугових фільтрів 13, 14 (фіг. 2) блока обробки сигналів 7, принцип роботи яких полягає в тому, що відбір сигналу з дво хкоординатного фотоприймача 6 узгоджується по енергії з величиною заряду конденсатора оптимальних енергетичних фільтрів 13, 14 (фіг. 3), ємність якого вибирається згідно умов балансу енергії: (при умові настройки в резонанс контур у входу фотоприймача на частоту модуляції лазера). Напруга фотоприймача індукована лазерним променем визначається: e ФП (t i , t i ) = S uSl S f × PS (t i , t i )m(Dh ) = , u = KФП × PS (t i , ti | Ti )m( Dh ) де: Su - коефіцієнт перетворення по напрузі випромінювання лазера; Su - спектральна оптична чутливість; Su - модуляційний коефіцієнт на частоті f; Ps(ti, ti|T0 , Dh) - потужність лазерного імпульсу ti, в момент ti, з періодом T0; m(Dh) - модуляція зміщення. При потужності лазерного променя Рл відбитий промінь в зоні локації визначається коефіцієнтом відбиття: PS=TS×Pл, Es (t | si ) = ò ò PS (t i , si )dtds = ò e2 (t )× f s ti ti 1 dt , Rd (i) де: Еs - енергія відбитого лазерного променя, ef - е.р.с. на виході двохкоординатного фотоприймача, яка дорівнює: e f = e= + e » (ti ) , f f де: - імпульсна напруга наведена лазерним відбитим променем, ef= - постійна складова на пруги, Rd(i) - динамічний опір фотоелемента матриці плюс опір контуру RLC в режимі резонансу на частоті f; Еф (ti)=K(l,e) Es(t) - енергія імпульсу наведена лазерним променем: еf»(ti) PФ (tc ) = 1 e 2 (t ) 1 2 dt = ò i (t ) R d (t )d t - середня ò t t R d (t) tt потужність імпульсу наведена лазерним променем в секторі фотоматриці. Баланс: енергія променя ↔ енергія заряду визначає оптимальне значення ємності виходячи з умови максимального струму в контурі по амплітуді: C ® C opt º (Im ® Im max ) ( ) на основі рівняння динаміки du (t ) dg(t ) i(t ) = =c c , dt dt визначаємо приріст напруги конденсатора при імпульсному заряді 1' i(t )dt c при чому приріст напруги на фотоелементі при імпульсному збудженні буде: 1 deФП (t ) = i t Rd + () i(t )dt , ce du c (t ) = é ù eФП (t ) = ò i(t)êRd t ) ( + 1 údt . ce û ë ti Тоді умова балансу енергій при резонансі: ætö EФ (t ) = E c (t ) = E c ç ÷ , è T ø opt де: Еф (t)=К(l,e) Ps(t), Ec(t|s)=K(l,e) Ps(t|s), Еф (ti) - енергія на секторі двохкоординатного фотоприймача викликана дією імпульсного лазерного променя: Еф (ti)=КaЕл(tі), де Кa - енергетичний коефіцієнт фотоматриці. Енергія накоплена конденсатором фільтра визначається зарядом g=си(t) при струмі в колі: dg du(t ) i(t ) = =c , dt dt і потужності: де: Pл ( t | s) = ò W j ( x, y | t )ds - потужність лазерного S променя січенням s, Wj - функція розподілу інтенсивності в січенні лазерного променя на виході оптичного формувача. Pл ( t | s) = ò W j ( x, y | t ) × s( Dh, t )ds - потужність опS du 2 (t) du 2 (t ) = td c . dt dt Напруга на конденсаторі визначає резонансну потужність: 1 2 du2 (t ) = i (t ) R d t )dt , ( td c і енергію на конденсаторі: 1 2 Ec = ò i (t)Rd (t i )dt , t dc V i (t ) R d t ) (R d (t) × c ) × c (= тичного сигналу на секторі і-фотоприймача при зміщенні об'єкту вимірювання на величину Dh(t) і 2 t és ù січені променя рівного ê 0 × m (D h | s)ú , де: m - кое2 ë û фіцієнт модуляції по зміщенню. Eл (t | si ) = ò ò Pл (t | s i )d tds - енергія лазерного s ti променя оптична. Рівняння балансу енергії в режимі резонансу: i де: td=Rd(t)c - динамічна постійна часу. 4 30843 Сигнал перетворений робасним фільтром 34 поступає на блок формування образу динамічної ситуації 35 в якому відбувається виділення сигналу по амплітуді в критичних точках параметру стану і інтегрування по часі сформованих імпульсних сигналів, які поступають на стохастичний процесор 36, який здійснює обчислення часу перебування траєкторії зміщення і її імовірнісних характеристик об'єкту вимірювання 5 за критичними пороговими значеннями і з врахуванням значень цих параметрів визначає правдивість ситуації: досягнення траєкторії зміщення об'єкту 5 допустимого ti é 1 ùT ê t ò (ti , t )R d t(i d)t ú ú , при Звідки C opt = maxê d t ê ú K aEл (ti ) ê ú ê ú ë û оптимальному співвідношенні: ti/Т довжини імпульсу до періоду при заданій частоті модуляції. Вибраний таким методом конденсатор задає режим і параметри послідовного резонансу в оптимальному енергетичному фільтрі 13, 14 на частоті слідування імпульсів лазерного променя, що забезпечує виділення корисного сигналу з максимальною амплітудою. Виділений оптимальними енергетичними смуговими фільтрами 13, 14 сигнали поступають на підсилювачі 15, 16 де підсилюються, потім фільтруються від фонових завад при допомозі смугових фільтрів 17, 18. Очи щені сигнали підсилюються підсилювачами 19, 20 і поступають на обмежувачі рівня 21, 22, а далі знову підсилюються підсилювачами 23, 24 і детектуються детекторами огинаючої 25, 26 з обмеженням по нижньому рівні шумів і детектори виділяють з них низькочастотний сигнал, що несе в собі корисну інформацію про віброзміщення об'єкту 5, дальше виділений сигнал інтегрують за допомогою ковзних робасних інтеграторів 27, 28, які виробляють сигнали усереднені за певний період часу і обмежують викиди завад, які пройшли в канал вимірювання. Після цього проводять сумування і віднімання сигналів, які поступають по кожному із каналів за допомогою суматорів 29, 30, при цьому шляхом сумування суматор 29 формує сигнал, що містить інформацію про інтенсивність відбитого оптичного променя лазера і індикує його на індикаторі інтенсивності 31. Суматор 30 формує сигнал, що містить інформацію про зміщення об'єкта вимірювання 5 шляхом віднімання сигналів з двох каналів і індикує його на індикаторі зміщення 32, шкала вимірювання якого задається маштабуючим підсилювачем 33, з якого сигнал поступає на робасний фільтр 34 з нелінійною амплітудно-частотною характеристикою, де відбувається обмеження грубих імпульсних завад і формується сигнал про зміщення об'єкту вимірювання 5 відносно початкового стану. Процес роботи робасного фільтра 34 описується таким виразом: Ù значення відхилення (D h
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and device for measuring vibration displacements
Автори англійськоюSikora Liubomyr Stepanovych
Назва патенту російськоюСпособ измерения вибрационных смещений и устройство для осуществления способа
Автори російськоюСикора Любомир Степанович
МПК / Мітки
МПК: G01H 9/00, G01B 11/00, G01B 9/00
Мітки: спосіб, віброзміщень, пристрій, реалізації, вимірювання
Код посилання
<a href="https://ua.patents.su/7-30843-sposib-vimiryuvannya-vibrozmishhen-ta-pristrijj-dlya-jjogo-realizaci.html" target="_blank" rel="follow" title="База патентів України">Спосіб вимірювання віброзміщень та пристрій для його реалізації</a>
Спосіб ультразвукового локаційного вимірювання відстані і пристрій для його реалізації
Номер патенту: 39336
Опубліковано: 15.06.2001
Автори: Гнітецька Тетяна Віталіївна, Гнітецький Віталій Анатолійович
МПК: G01F 23/296, G01F 23/28
Мітки: ультразвукового, спосіб, відстані, локаційного, реалізації, пристрій, вимірювання
Формула / Реферат:
1. Спосіб ультразвукового локаційного вимірювання відстані, що включає випромінення і прийом ультразвукових зондуючих імпульсів, підсилення прийнятих імпульсів, формування вимірюваного інтервалу, формування підрахункових імпульсів, цифрове перетворення вимірюваного інтервалу за допомогою підрахункових імпульсів, усереднення і цифрову індикацію віддалі від акустичного датчика до вимірюваного рівня, який відрізняється тим, що формування...
Спосіб вимірювання швидкості потоку і пристрій для його реалізації
Номер патенту: 41580
Опубліковано: 17.09.2001
Автор: Землянський Володимир Михайлович
Мітки: швидкості, вимірювання, потоку, пристрій, спосіб, реалізації
Формула / Реферат:
1. Спосіб вимірювання швидкості потоку шляхом зондування рухомого потоку лазерним пучком і виділення для двох напрямків прийому розсіяних пучків з наступним їх оптичним змішуванням на фотокатоді квадратичного детектора, який відрізняється тим, що потік зондують двома лазерними пучками з взаємоортогональними поляризаціями і різницею частот ΩМ, в кожному напрямі прийому виділяють два розсіяних пучки, що мають взаємоортогональні...
Спосіб вимірювання ваги на гаку та пристрій для його реалізації
Номер патенту: 21235
Опубліковано: 04.11.1997
Автори: Мартинчук Анастасія Данилівна, Денис Богдан Дмитрович, Рибчич Ілля Йосипович, Калужний Богдан Семенович
МПК: E21B 47/00
Мітки: вимірювання, пристрій, спосіб, ваги, гаку, реалізації
Формула / Реферат:
1. Спосіб вимірювання ваги на гаку, що базується на визначенні величини натягу нерухомого кінця талевої линви, який відрізняється тим, що як пружний чутливий елемент використовують талеву линву, визначають її величину розтягу через кут повороту нерухомого шківа кронблока, для чого перед спуском бурильного інструменту, при відсутності ваги на гаку, фіксують умовний нуль кута повороту, компонують низ бурильної колони з наперед визначеним...
Спосіб вимірювання ступеня просторової когерентності лазерного випромінювання та пристрій для його реалізації
Номер патенту: 40886
Опубліковано: 15.08.2001
Автори: Чудесов Олександр Павлович, Землянський Володимир Михайлович
МПК: H01S 3/094, G01J 9/00, H01S 3/00
Мітки: лазерного, випромінювання, просторової, когерентності, ступеня, реалізації, пристрій, спосіб, вимірювання
Формула / Реферат:
1. Спосіб вимірювання ступеня просторової когерентності лазерного випромінювання шляхом виділення з розширеного лазерного пучка двох лазерних пучків, рівних за інтенсивністю та узгоджених за поляризацією, який відрізняється тим, що в зоні вимірювання, утвореній в результаті перетину цих двох лазерних пучків під кутом g, формують інтерференційну картину, що біжить з постійною частотою, період якої не залежить від відстані між двома виділеними...
Спосіб вимірювання малих висот польоту над землею та пристрій для його реалізації
Номер патенту: 48476
Опубліковано: 15.08.2002
Автори: Порицький Сергій Леонідович, Бахвалов Валентин Борисович
МПК: G01S 13/24, G01S 13/00
Мітки: реалізації, вимірювання, землею, малих, польоту, пристрій, спосіб, висот
Формула / Реферат:
1. Спосіб вимірювання малих висот польоту над землею, згідно з яким випромінюють з борту вниз неперервний сигнал зондування за допомогою бортової передавальної антени, приймають відбитий від землі сигнал бортовою приймальною антеною і фазовим вимірювачем вимірюють зсув фаз, який відрізняється тім, що випромінюють неперервний синусоїдальний сигнал постійної амплітуди на частоті короткохвильового або середньохвильового діапазону, приймають...
Попередній патент: Спосіб контролю відповідності насоса і свердловини та підбору насоса
Наступний патент: Спосіб лікування дегенеративної нестабільності поперекового відділу хребта
Випадковий патент: Захоплювальний пристрій промислового робота