Підйомний канатно-грейферний пристрій
Номер патенту: 64161
Опубліковано: 25.10.2011
Формула / Реферат
Підйомний канатно-грейферний пристрій, що містить двоканатний грейфер з поліспастовими системами, два канатних приводи з незалежним управлінням замикання і підйому грейфера, котушки-збірники, який відрізняється тим, що додатково обладнаний рухомою траверсою з пружним зв'язком та закріпленими на ній зрівнювальними блоками, вузлами складання-розбирання кінців канатів грейфера і привода, зібраних в одну спільну систему підйомного пристрою, причому з'єднані кінці канатів грейфера і приводів мають однаковий напрямок звивки, та нерухомими блочними парами канатних приводів замикання і підйому грейфера, що утворюють нерухому верхню канатно-блочну підвіску з раціональними лінійними параметрами між блоками, а котушки-збірники співвісно спарені з додатковим фрикційним зв'язком між торцевими поверхнями.
Текст
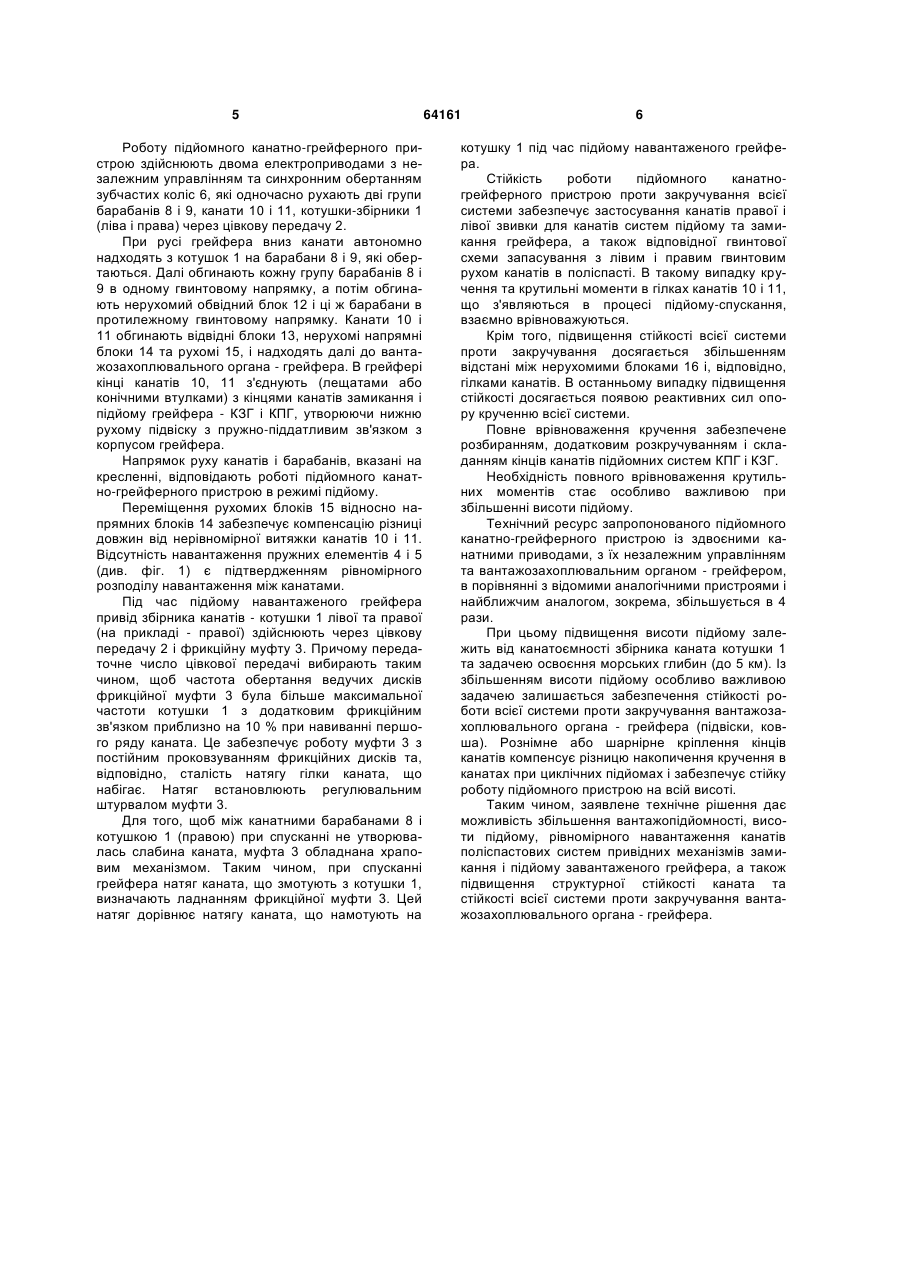
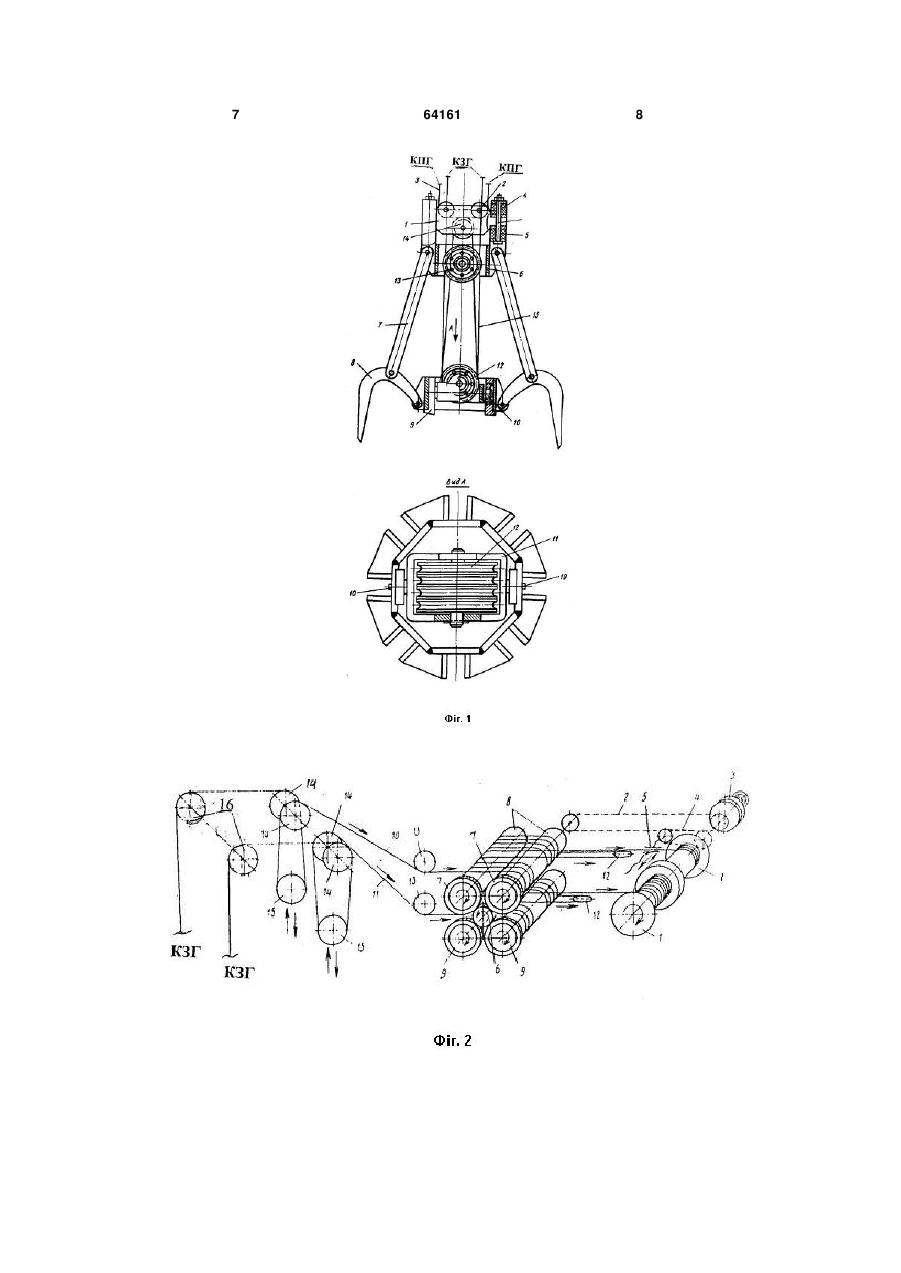
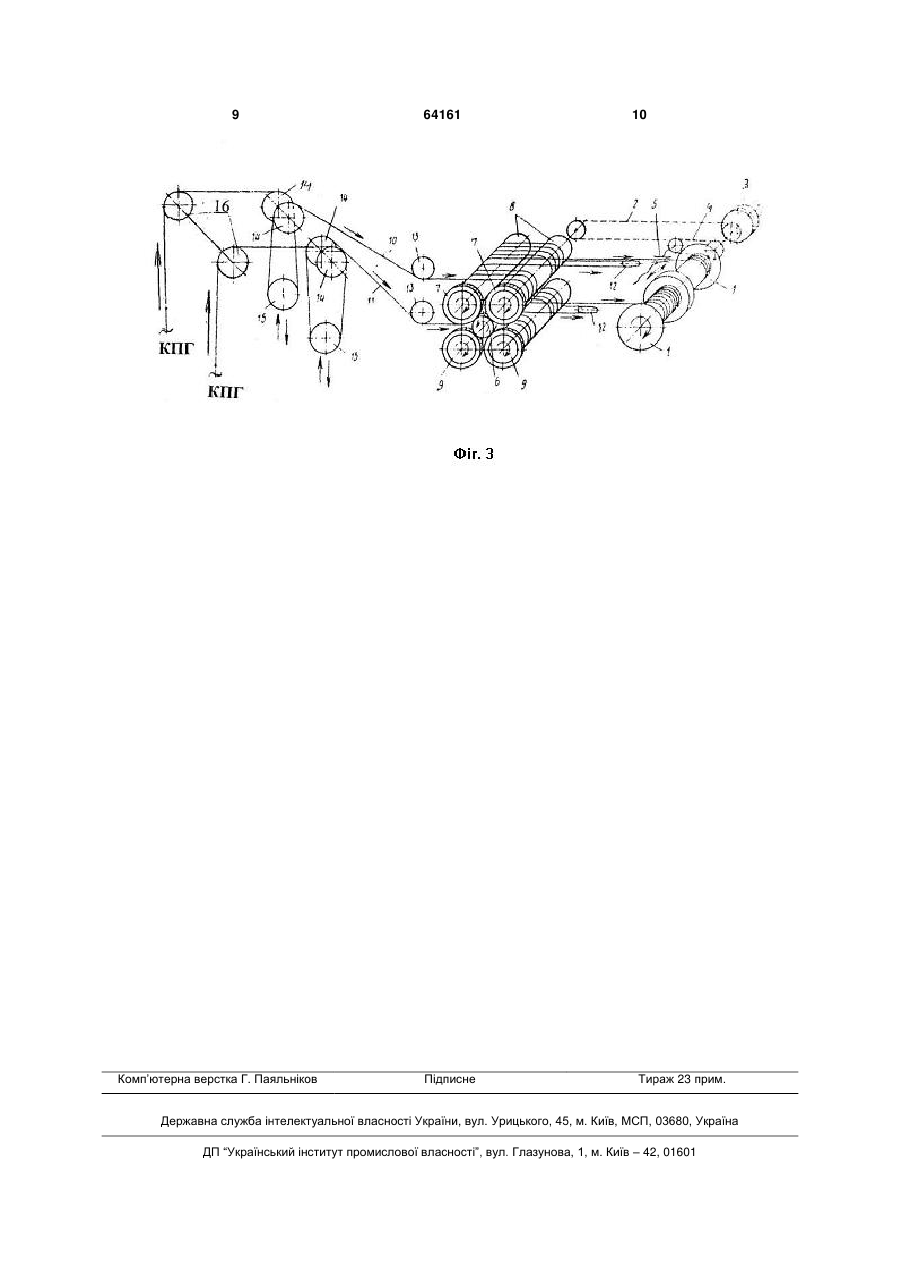
Підйомний канатно-грейферний пристрій, що містить двоканатний грейфер з поліспастовими системами, два канатних приводи з незалежним управлінням замикання і підйому грейфера, котушки-збірники, який відрізняється тим, що додат 3 рухому верхню канатно-блочну підвіску з раціональними лінійними параметрами між блоками, а котушки-збірники співвісно спарені з додатковим фрикційним зв'язком між торцевими поверхнями. Суттєвими ознаками заявленого технічного рішення в порівнянні з відомими і з найближчим аналогом, зокрема, є обладнання пристрою рухомою траверсою з пружним зв'язком та закріпленими на ній зрівнювальними блоками, яка забезпечує рівномірне навантаження канатів поліспастових систем замикання та підйому грейфера. Наявність вузлів складання-розбирання кінців канатів грейфера і привода, зібраних в одну спільну систему підйомного пристрою, коли з'єднані кінці канатів грейфера і приводів мають однаковий напрямок звивки, забезпечує при розбиранні повну компенсацію кручення канатів, що накопичилось внаслідок циклічних підйомів навантаженого грейфера. Нерухомі блочні пари канатних приводів замикання і підйому грейфера, що утворюють нерухому верхню канатно-блочну підвіску з раціональними лінійними параметрами між блоками, підвищують стійкість канатної системи проти закручування вздовж всієї висоти. Для того, щоб при спусканні грейфера не утворювалась слабина каната між приводними барабанами і котушками-збірниками, останні співвісно спарені з додатковим фрикційним зв'язком між торцевими поверхнями. На фіг. 1 зображено підвіску канатного грейфера; на фіг. 2 - канатний привід замикання грейфера зі схемою запасування канатів; фіг. 3 - канатний привід підйому грейфера. Підйомний канатно-грейферний пристрій містить рухому траверсу 1 із закріпленими на ній блоками 2, які обгинає канат 3 підйомного механізму та зрівнювальний блок 14 поліспаста. Блоки 12, 13, 14 обгинає канат 15 замикаючого механізму. До траверси через пружні елементи 4, 5 приєднана верхня головка 6, на якій шарнірно закріплена тяга 7, з'єднана зі щелепами 8, змонтованими на нижній траверсі 9. На осях 10 останньої закріплена обойма 11, виконана з можливістю повороту у вертикальній площині. Пристрій працює наступним чином. При опусканні грейфера на вантаж, який необхідно захопити, канат 15 замикаючого поліспаста ослаблений, нижня траверса 9 грейфера під дією власної ваги займає крайнє нижнє положення, щелепи 8 повністю розкриті. Рухома траверса 1 зміщена догори відносно до верхньої головки 6 і стискає пружний елемент 4. При встановленні грейфера на вантаж канат 3 ослаблений. Траверса 1 займає середнє положення, при цьому пружні елементи 4, 5 не навантажені. Коли грейфер захоплює вантаж, канат 15 вибирають, головку 6 і траверсу 9 зближують, замикаючи щелепи 8. Оскільки зрівнювальний блок 14 поліспаста встановлений на траверсі 1, яка має можливість переміщення у вертикальній площині, то під дією натягу каната 15 траверса 1 зміщується 64161 4 вниз відносно до верхньої головки 6 і стискає нижні пружні елементи 5. Підйом грейфера з вантажем здійснюють двома двигунами (на кресленні не показані): двигуном підтримуючого механізму грейфера та двигуном механізму замикання грейфера. При рівномірній і синхронній роботі двигунів зусилля в канатах однакові, траверса 1 знаходиться в рівновазі під дією рівних і протилежно направлених сил. Під час нерівномірної роботи двигунів в процесі підйому і спускання завантаженого грейфера, наприклад, при неодночасному їх вмиканні, розподіл навантаження між канатами змінюється у часі: траверсу 1 переміщують і на елементи 4 діють зусилля, що дорівнюють різниці між натягами підтримуючого та замикаючого канатів. При гранично допустимій різниці натягів канатів на пульті управління (на кресленні не показаний) автоматично спрацьовує світлова сигналізація і оператор управлінням двигунів відновлює рівновагу траверси 1. Зв'язок між канатними системами механізмів підйому та замикання грейфера здійснюють через пружні елементи 4 і 5, чим забезпечують зменшення динамічних навантажень на канати. При цьому встановлення зрівнювального блока 14 на траверсі 1 створює сприятливі умови для роботи пружних елементів 4 і 5, тому що при рівномірному розподілі навантаження між канатами вони не будуть навантаженими. Для розвантаження грейфера канат 15 ослаблюють. При цьому нижню траверсу 9 опускають, а щелепи 8 грейфера розкривають. Траверса 1 зміщена догори та спирається на пружний елемент 4. В такому положенні готовий до початку нового циклу роботи. У випадку, коли завантаження щелеп 8 нерівномірне або опір входженню щелеп 8 у матеріал, який необхідно захопити, буде різним, можливий перекіс нижньої траверси 9 відносно верхньої головки 6. У такому разі обойму 11 обертають на осях 10 разом із закріпленими в ній блоками 12, що значно зменшує негативний вплив кутів девіації на зношення каната 15 поліспаста замикання грейфера. Канатний привід замикання грейфера (див. фіг. 2) містить два збірники канатів - котушок 1 (ліву і праву), привід яких здійснюють через цівкову передачу 2, фрикційну муфту 3, цівкову передачу 4 та гвинтовий канатоукладач 5, центральне привідне зубчате колесо 6, яке знаходиться в зачепленні із зубчатими колесами 7, скріпленими з канатним барабанами 8 і 9. При цьому барабани 8 утворюють одну групу, а барабани 9 - іншу. Кожну групу барабанів охоплюють канатами 10 і 11 з протилежним гвинтовим напрямком через обвідний блок 12. Далі обгинають відвідні блоки 13 системи вирівняльних блоків, яка складається з нерухомих напрямних блоків 14 та рухомих 15, і надходять до грейфера. В грейфері кінці канатів 10, 11 з'єднують з канатною системою КЗГ (канат замикання грейфера) та КПГ (канат підйому грейфера), утворюючи спільну поліспастову схему механізму замикання навантаженого грейфера. 5 Роботу підйомного канатно-грейферного пристрою здійснюють двома електроприводами з незалежним управлінням та синхронним обертанням зубчастих коліс 6, які одночасно рухають дві групи барабанів 8 і 9, канати 10 i 11, котушки-збірники 1 (ліва і права) через цівкову передачу 2. При русі грейфера вниз канати автономно надходять з котушок 1 на барабани 8 і 9, які обертаються. Далі обгинають кожну групу барабанів 8 і 9 в одному гвинтовому напрямку, а потім обгинають нерухомий обвідний блок 12 і ці ж барабани в протилежному гвинтовому напрямку. Канати 10 і 11 обгинають відвідні блоки 13, нерухомі напрямні блоки 14 та рухомі 15, і надходять далі до вантажозахоплювального органа - грейфера. В грейфері кінці канатів 10, 11 з'єднують (лещатами або конічними втулками) з кінцями канатів замикання і підйому грейфера - КЗГ і КПГ, утворюючи нижню рухому підвіску з пружно-піддатливим зв'язком з корпусом грейфера. Напрямок руху канатів і барабанів, вказані на кресленні, відповідають роботі підйомного канатно-грейферного пристрою в режимі підйому. Переміщення рухомих блоків 15 відносно напрямних блоків 14 забезпечує компенсацію різниці довжин від нерівномірної витяжки канатів 10 і 11. Відсутність навантаження пружних елементів 4 і 5 (див. фіг. 1) є підтвердженням рівномірного розподілу навантаження між канатами. Під час підйому навантаженого грейфера привід збірника канатів - котушки 1 лівої та правої (на прикладі - правої) здійснюють через цівкову передачу 2 і фрикційну муфту 3. Причому передаточне число цівкової передачі вибирають таким чином, щоб частота обертання ведучих дисків фрикційної муфти 3 була більше максимальної частоти котушки 1 з додатковим фрикційним зв'язком приблизно на 10 % при навиванні першого ряду каната. Це забезпечує роботу муфти 3 з постійним проковзуванням фрикційних дисків та, відповідно, сталість натягу гілки каната, що набігає. Натяг встановлюють регулювальним штурвалом муфти 3. Для того, щоб між канатними барабанами 8 і котушкою 1 (правою) при спусканні не утворювалась слабина каната, муфта 3 обладнана храповим механізмом. Таким чином, при спусканні грейфера натяг каната, що змотують з котушки 1, визначають ладнанням фрикційної муфти 3. Цей натяг дорівнює натягу каната, що намотують на 64161 6 котушку 1 під час підйому навантаженого грейфера. Стійкість роботи підйомного канатногрейферного пристрою проти закручування всієї системи забезпечує застосування канатів правої і лівої звивки для канатів систем підйому та замикання грейфера, а також відповідної гвинтової схеми запасування з лівим і правим гвинтовим рухом канатів в поліспасті. В такому випадку кручення та крутильні моменти в гілках канатів 10 і 11, що з'являються в процесі підйому-спускання, взаємно врівноважуються. Крім того, підвищення стійкості всієї системи проти закручування досягається збільшенням відстані між нерухомими блоками 16 і, відповідно, гілками канатів. В останньому випадку підвищення стійкості досягається появою реактивних сил опору крученню всієї системи. Повне врівноваження кручення забезпечене розбиранням, додатковим розкручуванням і складанням кінців канатів підйомних систем КПГ і КЗГ. Необхідність повного врівноваження крутильних моментів стає особливо важливою при збільшенні висоти підйому. Технічний ресурс запропонованого підйомного канатно-грейферного пристрою із здвоєними канатними приводами, з їх незалежним управлінням та вантажозахоплювальним органом - грейфером, в порівнянні з відомими аналогічними пристроями і найближчим аналогом, зокрема, збільшується в 4 рази. При цьому підвищення висоти підйому залежить від канатоємності збірника каната котушки 1 та задачею освоєння морських глибин (до 5 км). Із збільшенням висоти підйому особливо важливою задачею залишається забезпечення стійкості роботи всієї системи проти закручування вантажозахоплювального органа - грейфера (підвіски, ковша). Рознімне або шарнірне кріплення кінців канатів компенсує різницю накопичення кручення в канатах при циклічних підйомах і забезпечує стійку роботу підйомного пристрою на всій висоті. Таким чином, заявлене технічне рішення дає можливість збільшення вантажопідйомності, висоти підйому, рівномірного навантаження канатів поліспастових систем привідних механізмів замикання і підйому завантаженого грейфера, а також підвищення структурної стійкості каната та стійкості всієї системи проти закручування вантажозахоплювального органа - грейфера. 7 64161 8 9 Комп’ютерна верстка Г. Паяльніков 64161 Підписне 10 Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюLifting rope-grab device
Автори англійськоюRoslyk Oleksii Ivanovych, Roslyk Mykola Oleksiiovych
Назва патенту російськоюПодъемное канатно-грейферное устройство
Автори російськоюРослик Алексей Иванович, Рослик Николай Алексеевич
МПК / Мітки
МПК: B66D 1/26
Мітки: канатно-грейферний, підйомний, пристрій
Код посилання
<a href="https://ua.patents.su/5-64161-pidjjomnijj-kanatno-grejjfernijj-pristrijj.html" target="_blank" rel="follow" title="База патентів України">Підйомний канатно-грейферний пристрій</a>
Механізм підйомний
Номер патенту: 13610
Опубліковано: 17.04.2006
Автори: Крупко Валерій Григорович, Дорохов Микола Юрійович
МПК: B66C 9/00
Формула / Реферат:
Механізм підйомний, що містить привід з передачею обертового руху на канатний барабан, з'єднаний із блоками гакової підвіски, який відрізняється тим, що додатково містить привід, що з'єднаний із хвильовим ланцюговим редуктором, з передачею обертового руху на канатний барабан, на якому закріплений один кінець каната, а другий кінець каната через блоки гакової підвіски з'єднаний із барабаном існуючого приводу.
Пружна канатно-стрижнева муфта
Номер патенту: 58799
Опубліковано: 26.04.2011
Автори: Бабій Михайло Володимирович, Настасенко Валентин Олексійович, Проценко Владислав Олександрович
МПК: F16D 3/00
Мітки: пружна, муфта, канатно-стрижнева
Формула / Реферат:
Пружна канатно-стрижнева муфта, що складається з двох півмуфт, які сполучені пружними елементами, що являють собою пружні стрижні, яка відрізняється тим, що стрижні розташовані паралельно осі півмуфт, встановлені в канатах, які мають петлеподібну форму, закріплені в півмуфтах обома кінцями, і мають можливість деформації.
Канатно-скреперна установка
Номер патенту: 51375
Опубліковано: 15.11.2002
Автори: Дідух Володимир Федорович, Булік Юрій Володимирович
МПК: E02F 3/46
Мітки: установка, канатно-скреперна
Формула / Реферат:
Канатно-скреперна установка, що містить велику і малу башти, несучий і тяговий канати, лебідку, механізм приводу робочих органів, яка відрізняється тим, що вона обладнана підвішеним до каретки ковшем, днище якого виконане у формі частини поверхні тора, з встановленим на ківш скребком, який виконаний рухомим і привід якого містить два важелі, з'єднаних канатом.
Грейферний механізм
Номер патенту: 23066
Опубліковано: 10.05.2007
Автори: Омельченко Володимир Іванович, Комаров Олександр Федорович, Анохін Юрій Олександрович, Карпов Володимир Петрович
МПК: B66C 3/00
Мітки: грейферний, механізм
Формула / Реферат:
Грейферний механізм, що включає верхню нерухому траверсу, нижню рухому траверсу, щелепи, що шарнірно закріплені на нижній рухомій траверсі і шарнірно з'єднані з верхньою нерухомою траверсою за допомогою шарнірних тяг, електричний привід, зв'язаний з електричним приводом редуктор із двома симетрично розташованими вихідними валами, барабан, установлений на одному з вихідних валів редуктора, систему рухомих і нерухомих блоків, що встановлені...
Канатно-рейкова дорога

Номер патенту: 6200
Опубліковано: 29.12.1994
Автори: Компанцев Фелікс Вікторович, Коваленко Микола Сергійович, Генералов Гелій Михайлович, Бухановський Володимир Васильович, Кузнєцов Олександр Степанович
МПК: B61B 7/00
Мітки: дорога, канатно-рейкова
Формула / Реферат:
(57) 1. Канатно-рельсовая дорога, преимущественно для горных выработок со знакопеременным профилем пути, содержащая привод со шкивом трения, концевую станцию с концевым шкивом, замкнутый тяговый канат, запасованный в упомянутые шкивы, и установленный на рельсовом пути подвижной состав, связанный с замкнутым тяговым канатом и выполненный с тормозными эле ментами, шарнирно установленными с возможностью взаимодействия со шпалами рельсового пути,...
Попередній патент: Комплекс очищення зернового вороху з поля і складування зерна
Наступний патент: Засіб для рекламування і/або інформування в громадському транспорті
Випадковий патент: Регулятор тиску