Пристрій керування вітродвигуном вітроенергетичної установки
Номер патенту: 64475
Опубліковано: 10.11.2011
Автори: Дудко Катерина Сергіївна, Лебедєв Лев Миколайович, Дубовик Володимир Григорович

Формула / Реферат
Пристрій керування вітродвигуном вітроенергетичної установки, що містить послідовно сполучені вітродвигун, пов'язаний кінематично з генератором, датчик потужності генератора, підсилювач з широкою зоною нечутливості, суматор, привод регулюючий, вихід якого сполучено з входом вітродвигуна, другий вихід якого через датчик похідної крутильного моменту, смуговий фільтр сполучено з другим входом суматора, третій вхід якого сполучено з задатчиком положення, а четвертий - через підсилювач з вузькою зоною нечутливості і усерднювач з виходом датчика потужності генератора, який відрізняється тим, що додатково містить підключені до третього виходу вітродвигуна послідовно сполучені датчик частоти напруги, пропорційно-інтегральний регулятор, пороговий елемент, ключ аналоговий, другий вхід якого сполучено з входом порогового елемента, другий вхід якого сполучено з джерелом постійної вхідної дії, вихід ключа аналогового сполучено з п'ятим входом суматора.
Текст
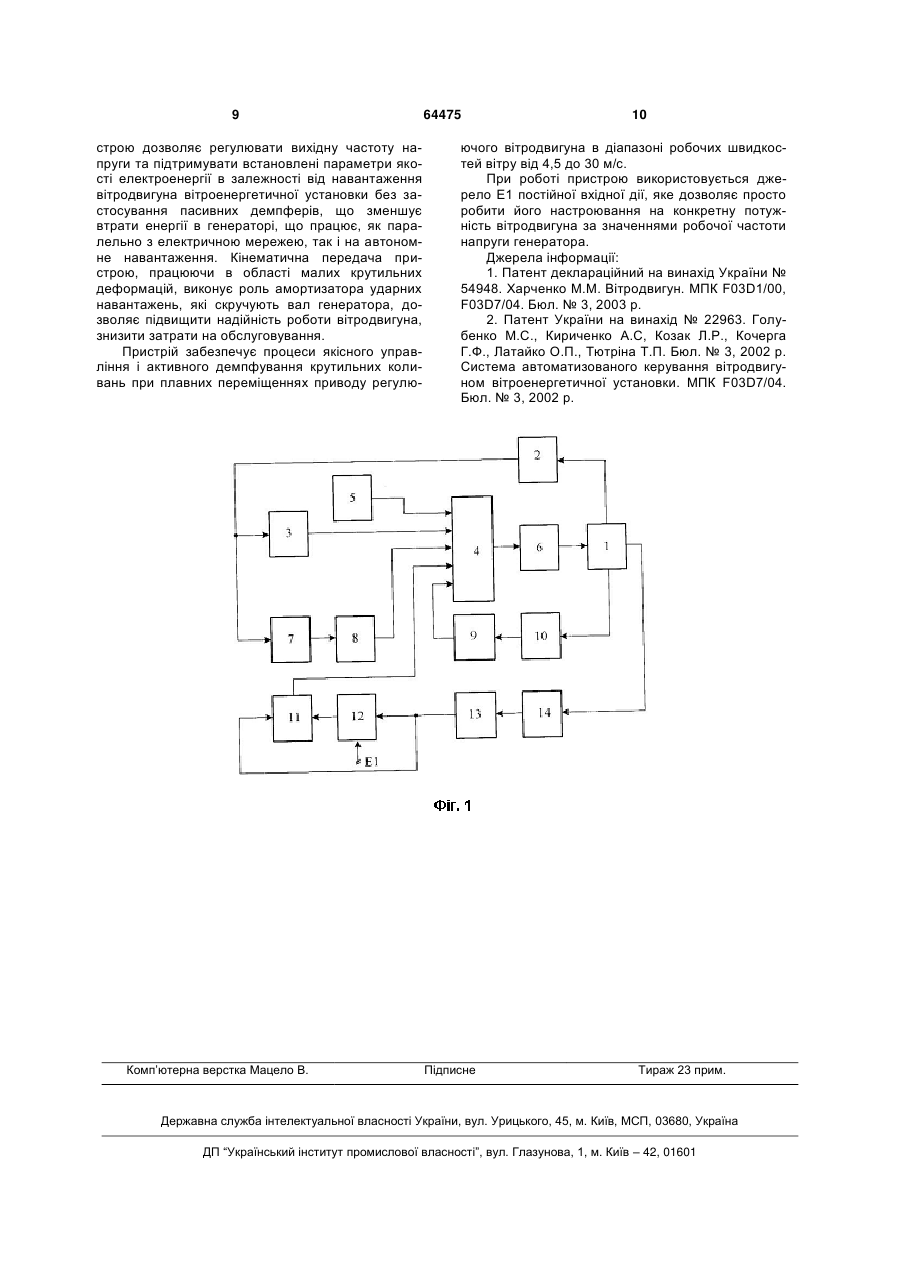
Пристрій керування вітродвигуном вітроенергетичної установки, що містить послідовно сполучені вітродвигун, пов'язаний кінематично з генератором, датчик потужності генератора, підсилювач з широкою зоною нечутливості, суматор, привод регулюючий, вихід якого сполучено з входом віт 3 ткового входу відомого суматора, при цьому нижня частота зрізу смугового фільтра вибрана менше власної частоти крутильних коливань ротора вітродвигуна, а верхня частота зрізу - більше власної частоти крутильних коливань ротора збудженого генератора [2]. Недоліком пристрою є відсутня можливість регулювання вихідної частоти напруги вітроенергетичної установки в залежності від навантаження та не забезпечуються встановлені параметри якості електроенергії. В основу корисної моделі поставлена задача удосконалення відомих пристроїв керування вітродвигуном вітроенергетичної установки, шляхом введення додаткових елементів, блоків та нових функціональних зв'язків між ними та створити новий пристрій керування вітродвигуном вітроенергетичної установки, що забезпечує регулювання вихідної частоти напруги вітроенергетичної установки в залежності від навантаження та дає можливість підтримувати встановлені параметри якості електроенергії. Поставлена задача вирішується тим, що пристрій керування вітродвигуном вітроенергетичної установки, який містить послідовно сполучені вітродвигун, пов'язаний кінематично з генератором, датчик потужності генератора, підсилювач з широкою зоною нечутливості, суматор, привод регулюючий, вихід якого сполучено з входом вітродвигуна, другий вихід якого через датчик похідної крутильного моменту, смуговий фільтр сполучено з другим входом суматора, третій вхід якого сполучено з задатчиком положення, а четвертий через підсилювач з вузькою зоною нечутливості і усерднювач з виходом датчика потужності генератора, згідно з корисною моделлю, додатково містить підключені до третього виходу вітродвигуна послідовно сполучені датчик частоти напруги, пропорційно-інтегральний регулятор, пороговий елемент, ключ аналоговий, другий вхід якого сполучено з входом порогового елементу, другий вхід якого сполучено з джерелом постійної вхідної дії, вихід ключа аналогового сполучено з п'ятим входом суматора. На кресленні представлена структурна схема пристрою керування вітродвигуном вітроенергетичної установки. Пристрій керування вітродвигуном вітроенергетичної установки (креслення) складається з послідовно сполучених вітродвигуна 1, пов'язаного кінематично з генератором, датчика 2 потужності генератора, підсилювача 3 з широкою зоною нечутливості, суматора 4, третій вхід якого сполучено з виходом задатчика 5 положення, вихід - через привод 6 регулюючий з входом вітродвигуна 1, вихід датчика 2 потужності генератора сполучено через усерднювач 7, підсилювач 8 з вузькою зоною нечутливості з четвертим входом суматора 4, другий вхід якого через смуговий фільтр 9, датчик 10 похідної крутильного моменту сполучено з другим виходом вітродвигуна 1, послідовно сполучені ключ 11 аналоговий, пороговий елемент 12, пропорційно - інтегральний регулятор 13, датчик 14 частоти напруги, вхід якого сполучено з третім виходом вітродвигуна 1, вихід пропорційно - інтег 64475 4 рального регулятора 13 сполучено з другим входом ключа 11 аналогового, другий вхід порогового елемента 12 сполучено з джерелом Е1 постійної вхідної дії, вихід ключа 11 аналогового сполучено з п'ятим входом суматора 4. Вітродвигун 1 має головку з установленим в ній генератором, кінематично зв'язаним з вітроколесом і закріпленим на вертикальній опорі з можливістю обертання в горизонтальній площині, механізми виводу вітроколеса від вітру та орієнтування на вітер і систему контролю за роботою генератора. Вітроколесо повертається в своє початкове положення за допомогою пружини, зусилля якої розраховується на обумовлену швидкість вітру. Його площина орієнтується перпендикулярно напряму вітрового потоку віндрозним приводним механізмом. Обертальний момент від вітроколеса передається торсіонним валом на мультиплікатор і через обгінну муфту - на генератор. Підтримка заданої швидкості обертання вітроколеса забезпечується приводом, що змінює кут установки лопатей. Вітроколесо є робочим органом і включає закріплені на валу лопаті, що мають спеціальний аеродинамічний профіль і здатні повертатися на кут від 0 до 90° навколо власних подовжніх осей. Для виключення аварійних режимів може застосовуватися система діагностики і аварійної зупинки з контролем вібрації основних елементів, температури, тиску і рівня масла, частоти обертання вітроколеса, кут повороту лопатей, струму, потужності, напруги, тощо. При перевищенні контрольованими параметрами порогових значень проводиться відключення вітрооенергетичної установки і її зупинка. Суматор 4 забезпечує формування сигналів розузгодження між заданим і фактичним значенням регульованого параметра, виконує роль гальванічного роздільника між вхідними і вихідними ланцюгами, так і входами між собою. Привод 6 регулюючий змінює положення площини лопатей вітродвигуна 1 при зміні сили вітрового потоку, що дозволяє скидати зайву потужність вітродвигуна, стабілізуючи середню частоту напруги мережі. Смуговий фільтр 9 служить для забезпечення якісних процесів демпфування, управління і достатніх запасів стійкості в системі регулювання пристрою, для реалізації плавних, незначних демпфуючих переміщень приводу 6 регулюючого вітродвигуном 1. Електричні параметри смугового фільтра, а також нижня і верхня частоти його зрізу пов'язані з електромеханічними параметрами вітроенергетичної установки власними частотами крутильних коливань ротора вітродвигуна і збудженого генератора. Датчик 10 похідної крутильного моменту може бути встановлений на валу вітродвигуна або генератора і може являти собою датчик похідної скручування кінематичної передачі або датчик похідної струму статора генератора, або датчик похідної швидкості вітру. В загальному випадку важлива наявність в сигналі датчика прямої або непрямої інформації про швидкість зміни обертального моменту в ланцюзі вітродвигун - генератор. 5 64475 Ключ аналоговий 11 забезпечує замикання вхідного з вихідним ланцюгом при подачі на його управляючий вхід високого логічного рівня з виходу порогового елемента 12. Пороговий елемент 12 забезпечує формування вихідного високого логічного рівня при умові перевищення значеним вхідного сигналу рівня Е1. Пропорційно - інтегральний (ПІ) регулятор 13 забезпечує необхідний закон зміни сигналу від датчика 14 частоти напруги. Закон регулювання ПІ регулятора 13 може бути записаний в двох формах для вихідної величини x t 1 t x K 1y K 0 ydt K 1 y ydt TИ 0 0 Регулююча дія ПІ регулятора представляє суму пропорційної та інтегральної складових з коефіцієнтами пропорційності, відповідно, K 1 і K 0 . Із зіставлення двох форм запису закону регулювання K 0 K1 / Ti , де Ti - постійна часу інтегрування (час ізодрому). Передавальна функція і частотна передавальна функція мають вигляд K 1 , Wp p K 1 0 K 1 1 p TИp K0 K jarctg K 1 W p j 0 e З останнього виразу видно, що в області малих частот при K 0 / K 1 ПІ регулятор поводиться як інтегральний регулятор. При високих частотах ПІ регулятор поводиться як пропорційний регулятор. При K 1 K 0 / ПІ регулятор поєднує гідності інтегрального регулятора в статиці і пропорційного регулятора в динаміці. В ПІ регуляторі 13 передбачається захист при значеннях, коли регулятор близький до режиму насичення, з використанням додаткового зворотного зв'язку, який включається і зменшує величину розузгодження на вході інтегруючої ланки, коли регулююча дія досягла граничного значення. ПІ регулятор 13 забезпечує нульову статичну помилку регулювання, простий в настройці, оскільки настроюються тільки два параметри, а саме коефіцієнт посилення Kp і постійна часу інтеграції Ti . У такому регуляторі є можливість оптимізації величини відношення Kp / Ti min , що забезпечує управління з мінімально можливою середньоквадратичною помилкою регулювання, мала чутливість до шумів в каналі вимірювання. Для ПІ регулятора спрощені формули розрахунку налаштувань K 1 та 2 2 K1 K 0 по методу Циглера-Нікольса в частотній області мають вигляд K 1 0,45K 1 кр, K 0 0,086K 1 кркр , де K 1 - коефіцієнт передачі пропорційної ланки ПІ регулятора; K 0 - коефіцієнт передачі інтегральної ланки ПІ регулятора; 6 кр - критична кругова частота, при якій сис тема знаходиться в режимі незгасаючих коливань на межі стійкості, її можна визначити експериментально або по фазово-частотній характеристиці об'єкту; K 1 кр - критичне значення коефіцієнта передачі пропорційної ланки регулятора, при якому система знаходиться на межі стійкості. Значення K 1 кр можна визначити експериментально або по амплітудно-частотній характеристиці об'єкту. Датчик 14 частоти напруги формує вихідний сигнал, пропорційний частоті мережі та забезпечує гальванічну розв'язку між вхідними та вихідними ланцюгами. Блок живлення таелементи для його підключення на кресленні не приведені. Прийняті позначення Un i - амплітуда сигналу на і-му виході n-го блоку. Працює пристрій наступним чином. У початковому стані за відсутності обурень і змін обертального моменту, вихідний сигнал датчика 10 похідної крутильного моменту рівний нулю. При появі зміни моменту на виході датчика 10 формується відповідний сигнал, що поступає через смуговий фільтр 9 в потрібній фазі на другий вхід суматора 4, вихід якого діє на роботу привода 6 регулюючого і відбувається поворот площин лопатей вітродвигуна 1 у бік компенсації виниклої зміни обертального моменту. Таким чином, шляхом додаткових переміщень в потрібній фазі площин лопатей вітродвигуна 1 здійснюється активне демпфування крутильних коливань в ланцюзі вітродвигуна - генератор практично без розсіяння енергії вітрового потоку. Для виключення резонансних явищ і забезпечення амортизації ударних обертальних навантажень на валу генератора власна частота крутильних коливань ротора вітродвигуна вибрана менше власної частоти крутильних коливань ротора збудженого генератора. На вхід порогового елемента 12 з характеристикою 1 при U13 E1 U12 0 при U13 E1 , надходить сигнал, пропорційний усередненій частоті fсер напруги мережі. Зона нечутливості обмежена заданим пороговим значенням середньої частоти Е1 fпор , забезпечує вітроагрегату максимальну для поточного значення швидкості вітру генерацію потужності, оскільки лопаті вітродвигуна перебувають в початковому оптимальному робочому положенні. В інтервалі зміни середньої частоти мережі від fпор до fmax заворот лопатей здійснюється пропорційно різниці f fсер fпор з коефіцієнтом пропорційності K . При цьому вихідний сигнал пропорційноінтегрального регулятора 13 через ключ 11 аналоговий подається на п'ятий вхід суматора 4. При збільшені середньої частоти до величини fmax лопаті вітродвигуна відхиляються від робочого положення на кут, достатній для повного скидання 7 потужності на вітродвигуні за будь-якої, допустимої для даного вітроагрегату, швидкості вітру. У цій ситуації при паралельній роботі у локальній мережі живлення з дізельгенератором генерує він енергію при мінімально допустимому рівні потужності, при цьому вітроагрегати залишаються у мережі в стані «гарячого» резерву на випадок збільшення навантаження. При силі вітру, що перевищує номінальну починає працювати контур обмеження потужності через датчик 2 потужності генератора та підсилювача 3 з широкою зоною нечутливості. Його робота відбувається або у взаємодії з контуром стабілізації частоти, якщо середня частота мережі fсеред більше порогової частоти fпор , або самостійно, якщо середня частота мережі менше цього порога у періоди, коли в локальній мережі є значна потреба в додатковій потужності. Будь-яка енергетична ситуація в локальній мережі відбивається на її середній частоті, надлишок енергії веде до підвищення частоти, а недостача - до зниження. На цій основі забезпечується стабілізація параметрів якості електроенергії та максимальна економія мінерального палива під час роботи вітроагрегатів у локальній мережі паралельно з генеруючими установками. Пристрій може бути оснащений синхронним або асинхронним генератором. Так як, перехід швидкості вітру від повного затишшя, робочих значень до штормових здійснюється не миттєво, а на протязі декількох хвилин, то таке превентивне виведення вітродвигуна із-під сильної дії вітру дозволяє уникнути його силовими елементами, трансмісією значних динамічних перевантажень і зникає необхідність закладати в конструкцію установки запаси міцності, які спрацьовують один раз в декілька років. Це дозволяє значно зменшити капітальні затрати на матеріали та монтажні роботи. Синхронний генератор є основним типом електричної машини для роботи на автономне навантаження і основним виробником електроенергії в промислових електромережах. Проте при роботі паралельно з електромережею такий генератор має високі крутильні коливання, оскільки обертальний момент, визначається кутовим положенням інерційного ротора, що синхронно обертається щодо електромагнітного поля. Жорсткість вузлів кріплення і передач обертального моменту обмежена допустимими габаритами і вагою висотної конструкції, момент інерції ротора вітродвигуна вельми великий, а із-за різких поривів вітру момент на валу генератора має швидкозмінний характер. Дані обставини сприяють виникненню низькочастотних крутильних коливань в ланцюзі вітродвигун-генератор і це посилює електромеханічні коливання самого генератора, що приводить до прискореного зносу конструкції, а також істотно знижує можливість регулювання основних параметрів установки. Використання пристрою забезпечує по сигналах датчика потужності автоматичне обмеження потужність, що підводиться до валу генератора від вітродвигуна, шляхом формування команд на від 64475 8 повідне переміщення приводу 6 регулюючого. При цьому команда на переміщення формується тільки при тривалих перевищеннях сигналами датчика 2 потужності вузької зони нечутливості підсилювача 8 із-за наявності в ланцюзі управління усереднювача 7 або при значних короткочасних перевищеннях широкої зони нечутливості підсилювача 3. Величини зон нечутливості підсилювачів 3, 8, визначаються допустимими статичними і динамічними перевантаженнями генератора по потужності і задаються виходячи з реальних характеристик вітродвигуна і генератора. Пристрій також забезпечує при підвищених швидкостях вітру мінімізацію інтегрального переміщення приводу 6 регулюючого і сумарних витрат енергії на управління. При включенні синхронного генератора на паралельну роботу добиваються виконання умов точної синхронізації: - значення, що діють у фазних електрорушійних силах (ЕРС) генератора повинні бути рівні значенням фазної напруги мережі; - частота ЕРС генератора повинна бути рівна частоті мережі; - ЕРС, що включається генератором, з напругою мережі повинні мати зрушення по фазі 180°; - генератор і мережа повинні мати однаковий порядок чергування фаз. При дотриманні цих умов генератори включаються в мережу практично без кидків струму. Необхідно враховувати синхронізуючу потужність, яка визначає силу, що утримує машину в синхронізмі з мережею, як пружний електромагнітний зв'язок ротора з магнітним полем, що обертається. Якщо по яких-небудь причинах кут між напругою і ЕРС статора, який має максимальне значення в 90°, перевищує його, то магнітний зв'язок порушиться, ротор випаде з синхронізму. Синхронізуюча потужність максимальна, коли електромагнітна потужність дорівнює нулю, а якщо вона максимальна, то синхронізуюча потужність дорівнює нулю, тобто синхронна машина знаходиться на межі статичної стійкості. При випаданні з синхронізму вона перестає працювати як синхронний генератор, переходить в асинхронний режим і у випадку, якщо відновлення синхронізму не відбувається, повинне бути зняте збудження і вона виводиться з роботи. Пристрій забезпечує стійке управління процесом у всьому діапазоні навантажень на вітроенергетичну установку з заданою якістю процесів управління, зв’язану з часом перехідного процесу, перерегулюванням і коливаннями при заданій точності в сталому режимі. Прямими показниками якості процесу управління, які визначаються по перехідній характеристиці можуть бути: стале значення вихідної величини, ступінь загасання, час досягнення першого максимуму, час регулювання, помилка регулювання, перерегулювання, динамічний коефіцієнт регулювання. Застосування введених датчика 14 частоти напруги, пропорційно - інтегрального регулятора 13, порогового елемента 12, ключа 11 аналогового, джерела E1 постійної вхідної дії до складу при 9 строю дозволяє регулювати вихідну частоту напруги та підтримувати встановлені параметри якості електроенергії в залежності від навантаження вітродвигуна вітроенергетичної установки без застосування пасивних демпферів, що зменшує втрати енергії в генераторі, що працює, як паралельно з електричною мережею, так і на автономне навантаження. Кінематична передача пристрою, працюючи в області малих крутильних деформацій, виконує роль амортизатора ударних навантажень, які скручують вал генератора, дозволяє підвищити надійність роботи вітродвигуна, знизити затрати на обслуговування. Пристрій забезпечує процеси якісного управління і активного демпфування крутильних коливань при плавних переміщеннях приводу регулю Комп’ютерна верстка Мацело В. 64475 10 ючого вітродвигуна в діапазоні робочих швидкостей вітру від 4,5 до 30 м/с. При роботі пристрою використовується джерело E1 постійної вхідної дії, яке дозволяє просто робити його настроювання на конкретну потужність вітродвигуна за значеннями робочої частоти напруги генератора. Джерела інформації: 1. Патент деклараційний на винахід України № 54948. Харченко М.М. Вітродвигун. МПК F03D1/00, F03D7/04. Бюл. № 3, 2003 р. 2. Патент України на винахід № 22963. Голубенко М.С., Кириченко А.С, Козак Л.Р., Кочерга Г.Ф., Латайко О.П., Тютріна Т.П. Бюл. № 3, 2002 р. Система автоматизованого керування вітродвигуном вітроенергетичної установки. МПК F03D7/04. Бюл. № 3, 2002 р. Підписне Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for control of a windmill of a wind-driven power plant
Автори англійськоюDubovyk Volodymyr Hryhorovych, Lebediev Lev Mykolaiovych, Dudko Kateryna Serhiivna
Назва патенту російськоюУстройство управления ветродвигателем ветроэнергетической установки
Автори російськоюДубовик Владимир Григорьевич, Лебедев Лев Николаевич, Дудко Екатерина Сергеевна
МПК / Мітки
МПК: F03D 7/00
Мітки: вітроенергетичної, пристрій, вітродвигуном, установки, керування
Код посилання
<a href="https://ua.patents.su/5-64475-pristrijj-keruvannya-vitrodvigunom-vitroenergetichno-ustanovki.html" target="_blank" rel="follow" title="База патентів України">Пристрій керування вітродвигуном вітроенергетичної установки</a>
Система автоматизованого керування вітродвигуном вітроенергетичноі установки
Номер патенту: 22963
Опубліковано: 15.03.2002
Автори: Кочерга Григорій Федорович, Кириченко Анатолій Семенович, Козак Леонід Романович, Тютріна Тамара Павлівна, Латайко Олександр Петрович, Голубенко Микола Степанович
МПК: F03D 7/04
Мітки: вітроенергетичноі, вітродвигуном, автоматизованого, установки, система, керування
Формула / Реферат:
1. Система автоматического управления ветродвигателем ветроэнергетической установки, содержащая ветродвигатель, связанный кинематически с генератором, исполнительный орган ветродвигателя с приводом-регулятором, соединенным входом с выходом сумматора, подключенного первым входом к задатчику положения привода-регулятора, вторым входом через усилитель с широкой зоной нечувствительности - к датчику мощности 'енератора, а третьим входом через...
Спосіб роботи вітроенергетичної установки
Номер патенту: 51159
Опубліковано: 12.07.2010
Автор: Трачук Микола Миколайович
МПК: F03D 9/00
Мітки: вітроенергетичної, роботи, установки, спосіб
Формула / Реферат:
Спосіб роботи вітроенергетичної установки, що передбачає встановлення на єдиному валу з вітроколесом кінематично зв'язаного з ним генератора для живлення теплового контуру, який відрізняється тим, що одночасно з вітроколесом на валу встановлюють з відповідною кінематикою додатковий генератор для живлення системи видобутку електроенергії, при цьому систему оснащують стабілізатором частоти струму.
Гідропривід відбору потужності вітроенергетичної установки
Номер патенту: 49469
Опубліковано: 26.04.2010
Автори: Губарев Олександр Павлович, Костюк Дмитро Вікторович, Ганпанцурова Оксана Сергіївна
МПК: F03D 9/00
Мітки: відбору, установки, вітроенергетичної, потужності, гідропривід
Формула / Реферат:
Гідропривід відбору потужності вітроенергетичної установки, що містить вітродвигун, кінематично зв'язаний через вал і редуктор з датчиком швидкості, функціонально з'єднаним з блоком керування, першим і другим насосами, які гідравлічно з'єднані, відповідно, з першим і другим переливними клапанами і, відповідно, з першим і другим гідророзподільниками, і пневмогідравлічним акумулятором, підключеним через паралельно включені зворотний клапан та...
Гідропривід відбору потужності вітроенергетичної установки
Номер патенту: 62961
Опубліковано: 26.09.2011
Автори: Костюк Дмитро Вікторович, Губарєв Олександр Павлович, Ганпанцурова Оксана Сергіївна
МПК: F03D 9/00
Мітки: гідропривід, потужності, установки, вітроенергетичної, відбору
Формула / Реферат:
Гідропривід відбору потужності вітроенергетичної установки, що містить вітродвигун, кінематично зв'язаний через вал і редуктор з датчиком швидкості, електрично з'єднаним з блоком керування, і першим і другим насосами, які гідравлічно з'єднані через перший і другий гідророзподільники з третім та четвертим гідророзподільниками, при цьому третій гідророзподільник з'єднаний з першим та другим гідромоторами, які через п'ятий та шостий...
Модуль вітроенергетичної установки фірми нб
Номер патенту: 28171
Опубліковано: 26.11.2007
Автори: Буряк Дмитрій Анатолійович, Буряк Анатолій Миколайович, Смоліч Раїса Миколаївна, Буряк Микола Миколайович
МПК: F03D 9/00
Мітки: модуль, установки, вітроенергетичної, фірми
Формула / Реферат:
Модуль вітроенергетичної установки, який відрізняється тим, що містить підсилювач швидкості вітру прямокутної конусоподібної форми з рухомими стінками, виконаними з можливістю розсування, на вхід якого подають повітряний потік вітру, вихід підсилювача швидкості вітру за допомогою повітропроводу підключений до входу робочої камери багатокамерного багатопоршневого роторного двигуна, три стінки робочої камери виконані нерухомими, на них у кінці...
Попередній патент: Ранцевий обприскувач
Наступний патент: Комплектний розподільний пристрій
Випадковий патент: Антифрикційний матеріал "романіт-с", спосіб його отримання і елемент вузла тертя, виконаний з антифрикційного матеріалу