Пристрій гравітаційного зондування підводного грунту
Формула / Реферат
Пристрій гравітаційного зондування підводного грущу, який складається з бортової і занурюваної частин, з'єднаних тросом, при цьому занурювана частина виконана у вигляді герметичного корпусу, який вміщує акселерометр реєстратор, відрізняється тим, що герметичний корпус виконаний у формі порожньої сфери, в котрій розміщені магнітний вмикач, гальванічна батарея і джерело живлення, входи яких з'єднані з виходами магнітного вмикача і гальванічної батареї, акселерометр виконаний у вигляді п'єзодатчика і підсилювача заряду, вхід якого з'єднаний з виходом п'єзодатчика, реєстратор вміщує нормуючий підсилювач, вхід якого з'єднаний з виходом підсилювача заряду, пристрій вибірки-збереження і компаратор, входи яких з'єднані з виходами нормуючого підсилювача, пристрій керування, один з входів якого з'єднаний з виходом компаратора, а один з виходів - з пристроєм вибірки-збереження, аналого-цифровий перетворювач, входи якого з'єднані з пристроєм керування і пристроєм вибірки-збереження, запам'ятовуючий пристрій, вхід якого з'єднаний з виходом аналого-цифрового перетворювача, один з входів/виходів запам'ятовуючого пристрою з'єднаний з пристроєм керування, а другий вхід-вихід є входом-виходом реєстратора і з'єднаний з бортовою частиною за допомогою роз'єднувача, встановленого у верхній частині корпуса зонда, бортова частина уявляє собою пристрій обробки даних і вміщує зовнішній накопичувач, обчислювальну машину, пристрій уводу-виводу, світлодиодний цифровий індикатор, кнопки керування, джерело живлючої напруги і мікропроцесорний контролер, який складається з центрального процесора, генератора фаз, вихід якого з'єднаний з входом центрального процесора, постійного і оперативного запам'ятовуючих пристроїв, при цьому вузли мікропроцесорного контролера з'єднані з пристроєм уводу-виводу за допомогою системної шини, вхід якої з'єднаний з виходом постійного запам'ятовуючого пристрою, а її входи/виходи - з центральним процесором і оперативним запам'ятовуючим пристроєм, зовнішній накопичувач виконаний у вигляді касетного магнітофона і з'єднаний з пристроєм уводу-виводу за допомогою компаратора і фільтра високих та низьких частот, причому вхід компаратора з'єднаний з виходом зовнішнього накопичувача, а вихід - з пристроєм уводу-виводу, вхід фільтра високих та низьких частот з'єднаний, з виходом пристрою уводу-виводу, а вихід - з входом зовнішнього накопичувача, обчислювальна машина з'єднана з пристроєм уводу-виводу через ключ, входи/виходи якого з'єднані з входами/виходами обчислювальної машини і пристрою уводу-виводу, світлодиодний цифровий індикатор з'єднаний з останнім за допомогою дешифратора, вхід якого з'єднаний з пристроєм уводу-виводу, а вихід - з світлодиодним цифровим індикатором.
Текст
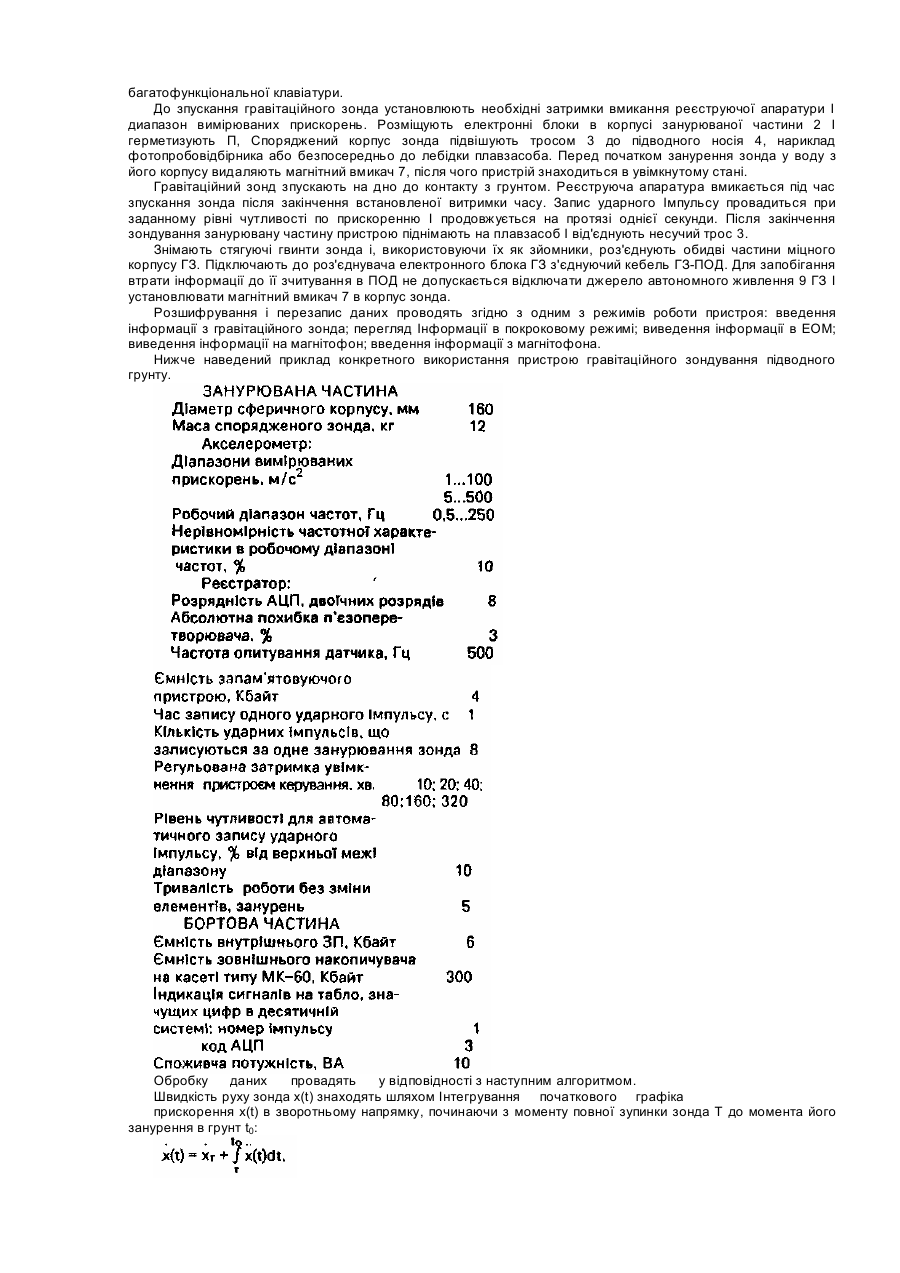
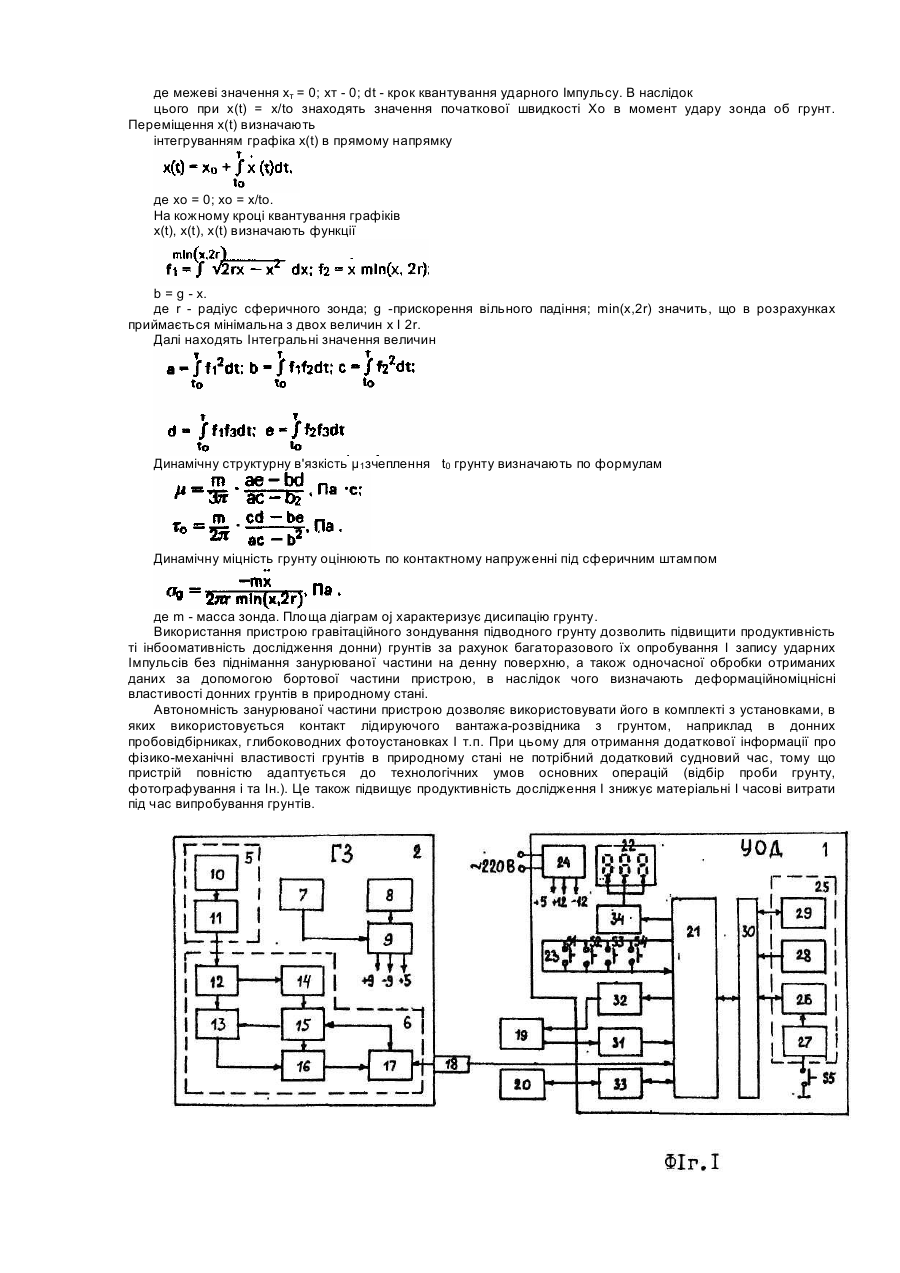
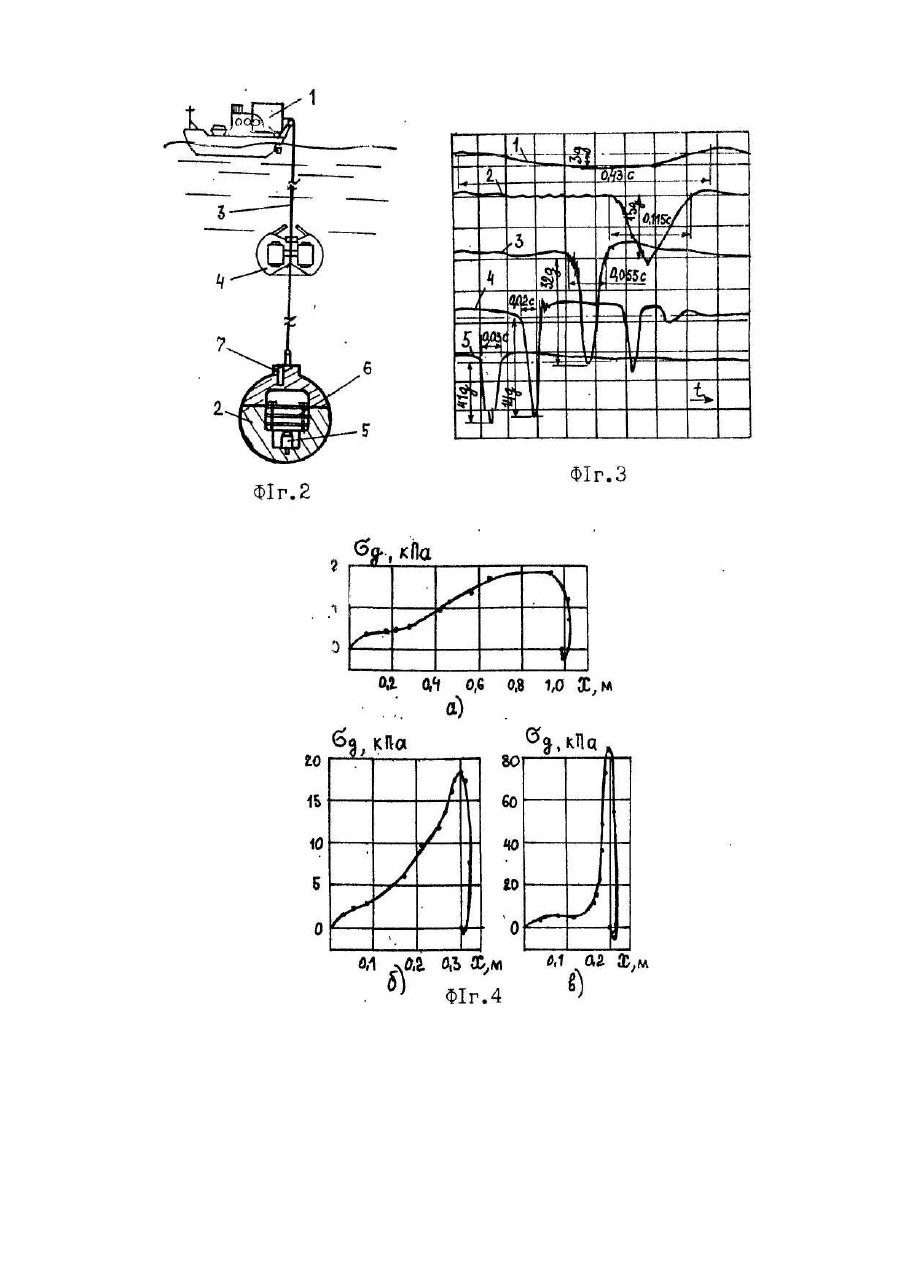
Винахід відноситься до Інженерно-геологічних досліджень І може бути використаний для визначення деформаційноміцнісних властивостей донних грунтів в природному стані. Відомий дистанційний пенетрометр, який вміщає циліндричний корпус з опорним фланцем І стабілізатором, конусний наконечник з штоком, на якому послідовно з певним кроком розміщені електроконтакти, враховуючий контакт з'єднаний з радіопередавачем, розташованим у верхній частині корпусу [1]. При скиданні пенетрометра з певної висоти, наприклад з вертольота, наконечник, підчас занурювання в грунт відносно опорного фланця, почергово замикає електроконтакти, сигнали від яких передаються на вимірювальну станцію, встановлену на літальному апараті. Про міцність грунту роблять висновок по кількості замикань електроконтактів. Недоліком відомого пристрою є мала продуктивність досліджень, яка зв'язана з одноразовим спрацьовуванням пенетромера; складність використання його при глибоководних Іспитах з-за великого гідродинамічного опору, труднощах передачі Інформації на денну поверхню; неможливість повторного використання пенетрометра. Найбільш близьким по технічній сутності до заявленого пристрою є вибраний за прототип самописний одновісний акселерометр, встановлений на трубчатому пробовідбійнику, що вміщає Інерційний вантаж, виконаний у вигляді циліндра з діаграмною стрічкою і встановлений на пружині, електродвигун, який за допомогою зубчатої передачі рівномірно обертає циліндр навколо своєї вісі, пишучий вузол, який переміщується впродовж вісі пробовідбірника І креслить на діаграмній стрічці спіральну криву [2]. При ударі пробовідбірника об дно під дією власної ваги акселерометр фіксує його прискорення відхиленням кривої від спіралі, завдяки якому визначають опір грунту пенетрації пробовідбірником і здвигову міцність грунту. Недоліками цього пристрою є такі. 1. Низька продуктивність дослідження із-за одноразового спрацьовування І необхідності піднімання пристрою на енну поверхню для перезарядки пишучого узла. 2. Мала Інформативність одержуваних даних, яка обумовлює необхідність використання кореляційних залежностей між негативними прискореннями пенетрометра І характеристиками грунту. 3. Складність Інтерпретації властивостей грунтів, яка зв'язана з введенням емпірічних коефіцієнтів, що в великій мірі залежать від конкретних умов зондування і параметрів пенетратора. Винахід направлений на вирішення завдання підвищення продуктивності та Інформативності дослідження доннихг грунтів. Указане завдання досягається тим, що в пристрої гравітаційного зондування підводного грунту, який складається з бортової і занурюваної частин, з'єднаних тросом, при цьому занурювана частина виконана у вигляді герметичного корпусу, який вміщає акселерометр І реєстратор, згідно з цим винаходом герметичний корпус виконаний у формі порожньої сфери, в котрій розміщені магнітний вмикач, гальванічна батарея І джерело живлення, входи яких з'єднані з виходами магнітного вмикача І гальванічної батареї. Акселерометр виконаний у вигляді п'єзодатчика і підсилювача заряду, вхід якого з'єднаний з виходом п'єзодатчика. Реєстратор вміщає нормуючий підсилювач, вхід якого з'єднаний з виходом підсилювача заряду, пристрій вибірки-збереження І компаратор, входи яких з'єднані з виходами нормуючого підсилювача, пристрій керування, один з входів якого з'єднаний з виходом компаратора, а один з виходів - з пристроєм вибіркизбереження, аналого-цифровий перетворювач, входи якого з'єднані з пристроєм керування і пристроєм вибірки-збереження, запам'ятовуючий пристрій, вхід якого з'єднаний з бортовою частиною за допомогою роз'єднувача, встановленого у верхній частині корпусу зонда. Бортова частина уявляє собою пристрій обробки даних І вміщає зовнішній накопичувач, обчислювальну машину, пристрій уводу-виводу, світлодиодний цифровий Індикатор, кнопки керування, джерело живлючої напруги І мікропроцесорний контролер, який складається з центрального процесора, генератора фаз, вихід якого з'єднаний з входом центрального процесора, постійного І оперативного запам'ятовуючих пристроїв. При цьому вузли мікропроцесорного контролера з'єднані з пристроєм уводу-ви-воду за допомогою системної шини, вхід якої з'єднаний з виходом постійного запам'ятовуючого пристрою, а її входи/виходи - з центральним процесором І оперативним запам'ятовуючим пристроєм, зовнішній накопичувач виконаний у вигляді касетного магнітофона І з'єднаний з пристроєм уводу-виводу за допомогою системної шини, вхід якої з'єднаний з виходом постійного запам'ятовуючого пристрою, а її входи/виходи - з центральним процесором І оперативним запам'ятовуючим пристроєм. Зовнішній накопичувач виконаний з вигляді касетного магнітофона І з'єднаний з пристроєм уводувиводу за допомогою компаратора і фільтра високих та низьких частот, при чому вхід компаратора з'єднаний з виходом зовнішнього накопичувача, обчислювальна машина з'єднана з пристроєм уводу-виводу через ключ, входи/виходи якого з'єднані з входами /виходами обчислювальної машини І пристрою уводу-виводу, світлодиодний цифровий Індикатор з'єднаний з останнім за допомогою дешифратора, вхід якого з'єднаний з пристроєм уводу-виводу, а вихід - з світлодиодним цифровим індикатором. Таким чином, заявлений пристрій гравітаційного зондування підводного грунту відповідає критерію винаходу "новизна". Зіставлення заявленого рішення з прототипом та іншими технічними рішеннями в даній області техніки не дозволило виявити в них ознаки, що відрізняють заявлене рішення від прототипу. Це дозволяє зробити висновок про відповідність його критерію "суттєві відзнаки". На фіг. 1 зображена структурная схема пристрою гравітаційного зондування підводного грунту; на фіг. 2 схема підвіски занурюваної частини пристрою; на фіг. З показані ударні Імпульси зонда на грунтах: 1 -мул; 2 пісок; 3 - глина; 4 - суглинок; 5 -вапняк; на фіг. 4 дані графіки динамічної несучої здібності мулу (1), піска (2) і глини (3). Пристрій гравітаційного зондування підводного грунту складається з бортової 1 та занурюваної 2 частин, з'єднаних тросом З з підводним носієм 4. Занурювана частина (гравітаційний зонд) 2 уявляє собою герметичний корпус, виконаний у формі порожньої сфери, в котрій розміщені акселерометр 5, реєстратор 6, магнітний вмикач 7, гальванічна батарея 81 джерело живлення 9. Акселерометр 5 виконаний у вигляді п'єзоелектричного датчика 10 І підсилювача заряду 11, вхід якого з'єднаний з виходом п'єзодатчика 10. Реєстратор б містить нормуючий підсилювач 12, вхід якого з'єднаний з виходом підсилювача заряду 11, пристрій вибірки-збереження 13, компаратор 14, пристрій керування 15, аналого-цифровий перетворювач 16, запам'ятовучий пристрій 17 І герметичний роз'єднувач 18. Вхід нормуючого підсилювача 12 з'єднаний з виходом підсилювача заряду 11, а входи пристрою вибіркизбереження 13 і компаратора 14 - з виходом нормуючого підсилювача 12. Один Із входів пристрою керування 15 з'єднаний з виходом компаратора 14, а один з його виходів - з пристроєм вибірки-збереження 13, Входи аналого-цифрового перетворювача 16 з'єднані з пристроєм керування 15 І пристроєм вибірки-збереження 13. Вхід запам'ятовуючого пристрою 17 з'єднаний з виходом аналого-цифрового перетворювача 16, один з його вході в /виході в - з пристроєм керування 15, а другий вхід/вихід є входом/виходом реєстратора 6 І з'єднаний з бортовою частиною 1 за допомогою роз'єднувача 18, встановленого у верхній частині корпусу зонда. Бортова частина 1 уявляє собою пристрій обробки даних І вміщає зовнішній накопичувач 19, обчислювальну машину 20, пристрій уводу-виводу 21, світлодиодний цифровий Індикатор 22, кнопки керування 23, джерело живлючої напруги 24 І мікропроцесорний контролер 25. Мікропроцесорний контролер 25 вміщає центральний процесор 26, генератор фаз 27, вихід якого з'єднаний з входом центрального процесора 26, постійний запам'ятовуючий пристрій 28 І оперативний запам'ятовуючий пристрій 29. Вузли контролера 25 з'єднані з пристроєм уводу-виводу 21 за допомогою системної шини ЗО, вхід якої з'єднаний з виходом постійного запам'ятовуючого пристрою 28, а її входи/виходи - з центральним процесором 261 оперативним запам'ятовуючим пристроєм 29. Зовнішній накопичувач 19 виконаний у вигляді касетного магнітофона І з'єднаний з пристроєм уводувиводу 21 за допомогою компаратора 311 фільтра високих та низьких частот. Вхід компаратора 31 з'єднаний з виходом зовнішнього накопичувача 19, а його вихід - з пристроєм уводу-виводу 21. Вхід фільтра високих та низьких частот 32 з'єднаний з виходом пристрою уводу-виводу 21, а його вихід - з входом зовнішнього накопичувача 19, Обчислювальна машина 20 з'єднана з пристроєм уводу-виводу 21 за допомогою ключа 33, входи/виходи якого з'єднані з входами/виходами обчислювальної машини 20 І пристрою уводу-виводу 21. Світлодиодний цифровий Індикатор 22 з'єднаний з пристроєм уводу-виводу 21 за допомогою дешифратора 34, вхід якого з'єднаний з пристроєм уводу-виводу 21, а вихід - з світлодиодним цифровим Індикатором 22. Пристрій гравітаційного зондування функціонує таким чином. Електроживлення гравітаційного зонду (ГЗ) здійснюється від автономного джерела живлення 9, яке складається з двох батарей 8 типу "Корунд". Напруга ±9 В постійного струму подається на джерело живлення 9, яке вміщає електронні ключі, керовані магнітним вмикачем 7,1 стабілізатор напруги + 5 В. Сигнал п'єзоакселерометра 10, пропорційний діючому на нього прискоренню, через підсилювач заряду 11 І нормуючий підсилювач 12 надходить на вхід пристрою вибірки-збереження (ПВЗ) 13 І вхід компаратора 14. Робочий діапазон частот формується фільтрами низьких та високих частот, увімкнутими на вході і виході підсилювача заряду 11. Сигнал з виходу пристрою вибірки-збереження 13 перетворюється аналого-цифровим перетворювачем (АЦП) 16 в цифровий код, який записується в запам'ятовуючий пристрій (ЗП) 17. Пристрій керування 15 формує відпрацювання затримки після вмикання живлення ГЗ І після запису чергового ударного Імпульсу. В режимі готовності по сигналу з виходу компаратора 14 пристрій керування 15 виробляє керуючі сигнали для ПВЗ 13, АЦП 16 і ЗП 17, виконуючи таким чином запис чергового ударного Імпульсу. Джерельна напруга ~ 220 В, 50 Гц перетворюється в джерелі живлючоТ напруги 24 в постійні напруги + 5 В; -12 В; + 12 В, необхідні для функціонування пристрою обробки даних (ПОД) 1. Мікропроцесорний контролер 25 виконаний на баз! комплекта СБИС К580 І працює за програмою, записаною у постійному запам'ятовуючому пристрої 28. Трирозрядний світлодиодний Індикатор 22 керується мікропроцесорним контролером 25 через пристрій уводу-виводу 21 (П В В) І дешифратор 34. Кнопки S1...S4, які керують роботою ПОД 1, опитуються контролером 25 через ПВВ 21. а кнопка S5 забезпечує рестарт центрального процесора 26. Прийом інформації з ГЗ здійснюється через ПВВ 21 шляхом подавання керуючих сигналів на пристрій керування 15 гравітаційного зонда. Запас Інформації на касетний магнітофон 19 виконується через фільтр 32 низьких та високих частот, а зчитування Інформації з магнітофона 19 - через компаратор 31. Вивід Інформації з ЕОМ 20 здійснуюється через послідовний Інтерфейс в стандарті RS232. Необхідні рівні сигналів формуються ключом 33. Передача Інформації в ЕОМ 20 супроводжується сигналом готовності по передачі і здійснюється за сигналом запитання передачі, що приймається від ЕОМ 20. При установленому магнітному вмикані 7 гравітаційний зонд знаходиться у вимкнутому стані. Після викручування вмикача 7 відпрацьовується затримка П1 вмикання режима готовності. При ударі ГЗ об дно в режимі готовності на протязі однієї секунди виконується запис ударного Імпульсу в ЗП 17 з частотою опитування 500 Гц, після чого відпрацьовується затримка П2 вмикання режиму готовності, яка запобігає можливість помилкового запису при відриві ГЗ від дна. Після запису певної кількості ударних Імпульсів ГЗ залишається у режимі збереження інформації, яка зберігається до моменту встановлення магнітного вмикача 7 або відключення джерела автономного живлення 9. Після піднімання зонда І розкривання його корпусу Інформація через з'єднуючий кабель переписується в оперативний запам'ятовуючий пристрій 29 ПОД 1 і зберігається у ньому до запису нової Інформації або до вимкнення ПОД 1 від джерела змінного струму. Інформація, що зберігається в ОЗУ 29, може бути записана на касетний магнітофон 19, виведена в ЕОМ або її можна продивитись на цифровому Індикаторі 22 в ручному покроковому режимі. При запису Інформації на касетний магнітофон їй можна привласнити номер в Інтервалі 0...99, що дозволяє Ідентифікувати інформацію при наступному зчитуванні її з магнітофонної стрічки. При перегляді Інформації на Індикаторі уводиться номер серії від 0 до 7 і номер точки від 0 до 499, що дозволяє продивитися Інформацію з будь-якого необхідного місця. Керування роботою ПОД 1 здійснюється шляхом послідовного подавання команд з багатофункціональної клавіатури. До зпускання гравітаційного зонда установлюють необхідні затримки вмикання реєструючої апаратури І диапазон вимірюваних прискорень. Розміщують електронні блоки в корпусі занурюваної частини 2 І герметизують П, Споряджений корпус зонда підвішують тросом 3 до підводного носія 4, нариклад фотопробовідбірника або безпосередньо до лебідки плавзасоба. Перед початком занурення зонда у воду з його корпусу видаляють магнітний вмикач 7, після чого пристрій знаходиться в увімкнутому стані. Гравітаційний зонд зпускають на дно до контакту з грунтом. Реєструюча апаратура вмикається під час зпускання зонда після закінчення встановленої витримки часу. Запис ударного Імпульсу провадиться при заданному рівні чутливості по прискоренню І продовжується на протязі однієї секунди. Після закінчення зондування занурювану частину пристрою піднімають на плавзасоб І від'єднують несучий трос 3. Знімають стягуючі гвинти зонда і, використовуючи їх як зйомники, роз'єднують обидві частини міцного корпусу ГЗ. Підключають до роз'єднувача електронного блока ГЗ з'єднуючий кебель ГЗ-ПОД. Для запобігання втрати інформації до її зчитування в ПОД не допускається відключати джерело автономного живлення 9 ГЗ І установлювати магнітний вмикач 7 в корпус зонда. Розшифрування і перезапис даних проводять згідно з одним з режимів роботи пристроя: введення інформації з гравітаційного зонда; перегляд Інформації в покроковому режимі; виведення інформації в ЕОМ; виведення інформації на магнітофон; введення інформації з магнітофона. Нижче наведений приклад конкретного використання пристрою гравітаційного зондування підводного грунту. Обробку даних провадять у відповідності з наступним алгоритмом. Швидкість руху зонда x(t) знаходять шляхом Інтегрування початкового графіка прискорення x(t) в зворотньому напрямку, починаючи з моменту повної зупинки зонда Τ до момента його занурення в грунт t0: де межеві значення хт = 0; хт - 0; dt - крок квантування ударного Імпульсу. В наслідок цього при x(t) = x/to знаходять значення початкової швидкості Хо в момент удару зонда об грунт. Переміщення x(t) визначають інтегруванням графіка x(t) в прямому напрямку де хо = 0; хо = x/to. На кожному кроці квантування графіків x(t), x(t), x(t) визначають функції b = g - x. де r - радіус сферичного зонда; g -прискорення вільного падіння; min(x,2r) значить, що в розрахунках приймається мінімальна з двох величин x І 2r. Далі находять Інтегральні значення величин Динамічну структурну в'язкість μ1зчеплення t0 грунту визначають по формулам Динамічну міцність грунту оцінюють по контактному напруженні під сферичним штампом де m - масса зонда. Площа діаграм oj характеризує дисипацію грунту. Використання пристрою гравітаційного зондування підводного грунту дозволить підвищити продуктивність ті інбоомативність дослідження донни) грунтів за рахунок багаторазового їх опробування І запису ударних Імпульсів без піднімання занурюваної частини на денну поверхню, а також одночасної обробки отриманих даних за допомогою бортової частини пристрою, в наслідок чого визначають деформаційноміцнісні властивості донних грунтів в природному стані. Автономність занурюваної частини пристрою дозволяє використовувати його в комплекті з установками, в яких використовується контакт лідируючого вантажа-розвідника з грунтом, наприклад в донних пробовідбірниках, глибоководних фотоустановках І т.п. При цьому для отримання додаткової інформації про фізико-механічні властивості грунтів в природному стані не потрібний додатковий судновий час, тому що пристрій повністю адаптується до технологічних умов основних операцій (відбір проби грунту, фотографування і та Ін.). Це також підвищує продуктивність дослідження І знижує матеріальні І часові витрати під час випробування грунтів.
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for gravitational probing underwater earth
Автори англійськоюSukach Mykhailo Kuzmych
Назва патенту російськоюУстройство гравитационного зондирования подводного грунта
Автори російськоюСукач Михаил Кузьмич
МПК / Мітки
МПК: G01V 9/00
Мітки: пристрій, гравітаційного, зондування, підводного, грунту
Код посилання
<a href="https://ua.patents.su/5-6714-pristrijj-gravitacijjnogo-zonduvannya-pidvodnogo-gruntu.html" target="_blank" rel="follow" title="База патентів України">Пристрій гравітаційного зондування підводного грунту</a>
Пристрій для обробки грунту рідкими речовинами
Номер патенту: 4678
Опубліковано: 28.12.1994
Автори: Яцишин Василь Михайлович, Петровський Георгій Миколайович, Вахрамєєв Юрій Івановіч, Піскозуб Збігнєв Йосипович
МПК: A01M 7/00
Мітки: рідкими, речовинами, грунту, обробки, пристрій
Формула / Реферат:
Устройство для обработки почвы жидкими веществами, содержащее емкость для жидких веществ, насос, последовательно установленные в напорной магистрали регулятор расхода и отсечное устройство, имеющее клапан с приводом и выходную камеру, сообщенную с рабочим органом и с дополнительной емкостью, отличающееся тем, что дополнительная емкость через жиклер, установленный на ее входе, сообщена с напорной магистралью, а привод клапана отсечного...
Пристрій для підводного полювання

Номер патенту: 5382
Опубліковано: 28.12.1994
Автор: Сурков Анатолій Васильович
МПК: F41B 11/00
Мітки: підводного, полювання, пристрій
Формула / Реферат:
Устройство для подводной охоты, состоящее из пневматического подводного ружья, содержащего ствол, надульник с осевым отверстием в передней части для гарпуна и радиальными отверстиями для выхода воды из ствола, ресивер, поршень, стопорно-спусковой механизм со спусковым крючком, тягой, пружиной, шепталом и предохранителем, линь и устройство сброса линя, и гарпун, содержащий шток с хвостовым утолщением и стабилизатор, отличающееся тем, что его...
Пристрій для термічного укріплення грунту
Номер патенту: 77
Опубліковано: 30.04.1993
Автор: Сирих Віталій Михайлович
МПК: E02D 3/11
Мітки: пристрій, термічного, грунту, укріплення
Формула / Реферат:
(57) 1. Устройство для термического укрепления грунта, включающее затвор, коаксиально закрепленные на нем наружный и внутренний воздуховоды-токопроводы, выполненные в нижней части последнего отверстия, установленный на наружном воздуховоде герметизирующий элемент, расположенный под ним электронагреватель, охватывающий его стакан и фиксирующие приспособления, отличающееся тем, что, с целью повышения его надежности, стенка стакана выполнена в...
Пристрій для меліоративного оброблення грунту
Номер патенту: 4598
Опубліковано: 28.12.1994
Автори: Прістер Борис Самойлович, Москов Микола Якович, Фурто Генадій Савич, Брик Микола Гнатович
МПК: A01B 13/16
Мітки: оброблення, грунту, меліоративного, пристрій
Формула / Реферат:
1. Устройство для мелиоративной обработки почвы, содержащее раму и установленные на ней по крайней мере один щелерез, сборно-приемное приспособление, имеющее расположенные под кожухом транспортирующие шнеки с правой и левой навивкой и прикатывающий каток, отличающееся тем, что устройство снабжено последовательно установленными на раме перед сборно-приемным приспособлением дисковыми ножами, подрезающим лемехом и измельчителем, а...
Комбінований пристрій для обробки грунту та сівби
Номер патенту: 4602
Опубліковано: 28.12.1994
Автор: Новаков Сергій Олександрович
МПК: A01B 49/06
Мітки: пристрій, сівби, обробки, грунту, комбінований
Формула / Реферат:
1. Комбинированное устройство для обработки почвы и посева, содержащее последовательно установленные на раме сошник в виде плоскорежущей стрельчатой лапы с распределителем посевного материала и расположенный выше него второй почвообрабатывающий рабочий opган в виде двухгранного клина, отличающееся тем, что вершина двухгранного клина второго рабочего органа направлена в сторону, противоположную вершине стрельчатой лапы, а ширина захвата клина...
Попередній патент: Безрулонний дах будівлі
Наступний патент: Спосіб визначення величини функціональної різниці довжини нижніх кінцівок і пристрій для його здійснення
Випадковий патент: Мостовий кран