Підземнорухомий пристрій з автоматичним керуванням дискретним переміщенням

Формула / Реферат
Підземнорухомий пристрій з автоматичною системою керування дискретним переміщенням, що складається з носової частини, передньої та задньої фіксуючих камер, герметично охоплених еластичними оболонками, виконавчого механізму, блока пневматичної або гідравлічної енергії, інтелектуального програмованого мікроконтролера та двигуна, який відрізняється тим, що виконавчий механізм виконаний у вигляді двох незворотних та двох електромагнітних клапанів з електронними індикаторами їхнього спрацювання, на протилежних сторонах поршня двигуна розміщено давачі крайнього лівого та крайнього правого положення носової частини, а в передній фіксуючій камері встановлено давач тиску енергоносія.
Текст
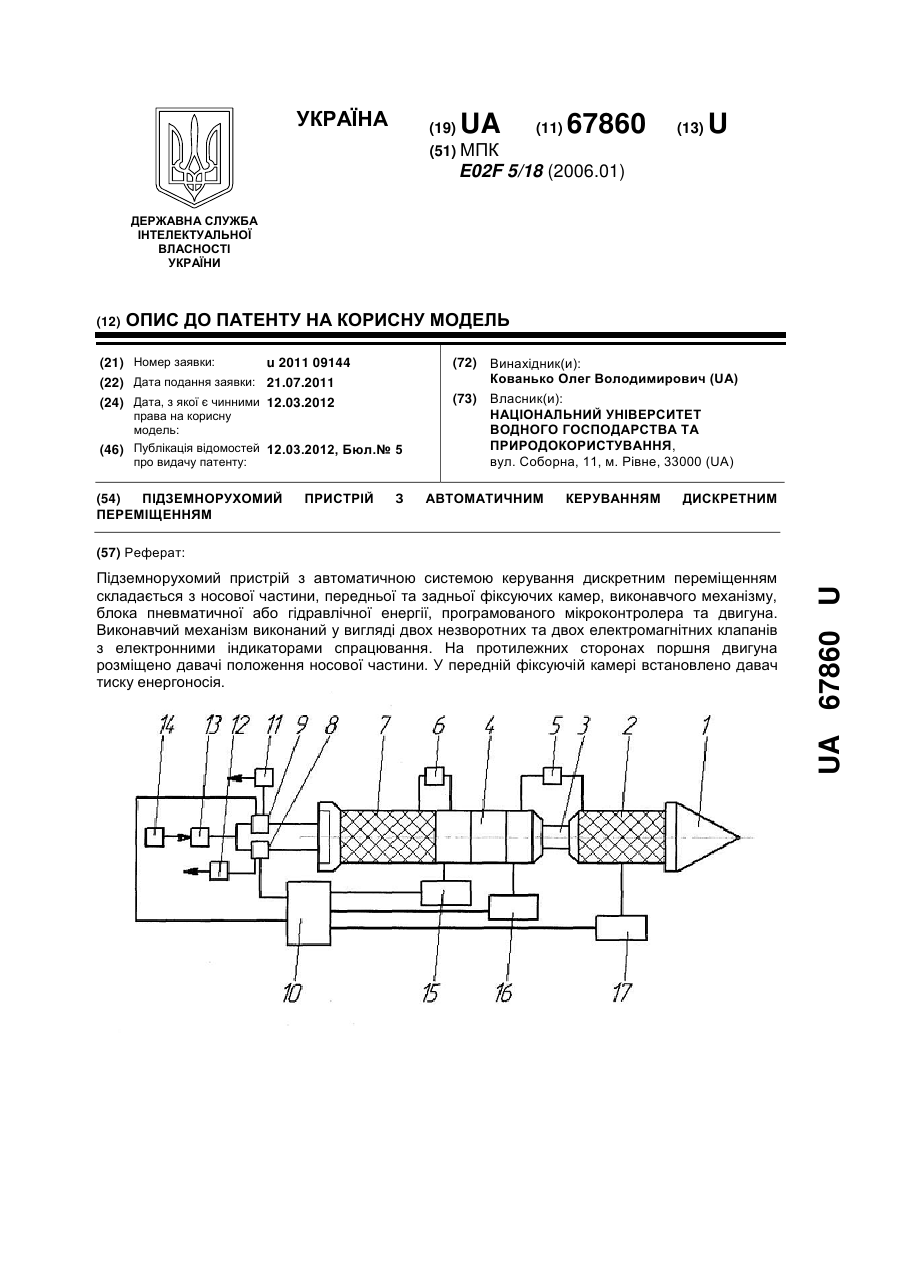
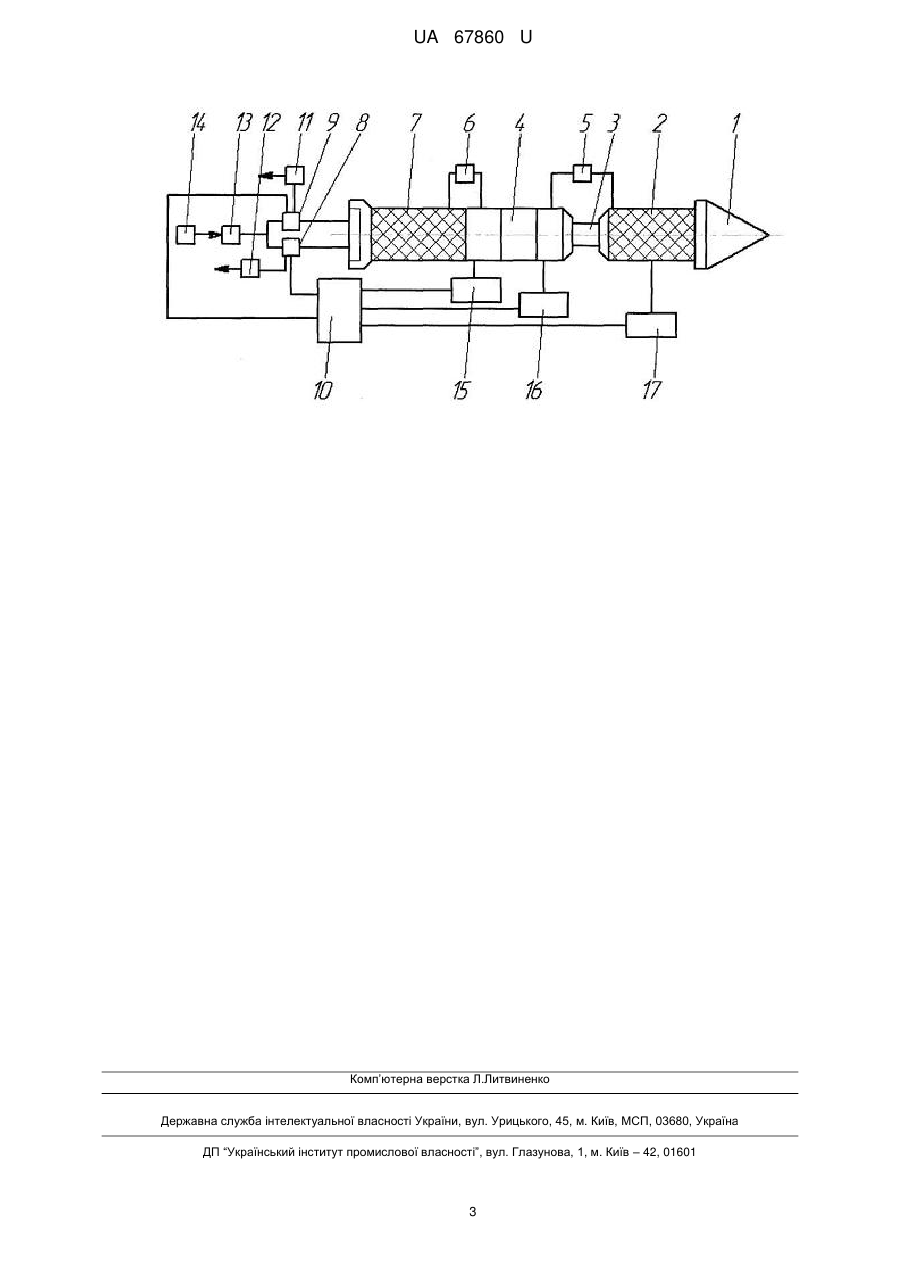
Реферат: UA 67860 U UA 67860 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до гірничої промисловості, будівництва (зокрема гідротехнічного і енергетичного), сільського і комунального господарств, геологорозвідки, а також може бути використаною у відповідних геотехнологіях здійснення моніторингу підземного простору в районі Чорнобильської АЕС та як підземний транспортний засіб. Відомий пристрій для утворення порожнин у ґрунті, який складається з носової конічної частини, розпірних носової та хвостової камер, корпусу, що розділений на окремі секції, де розташовані кільцеподібні поршні, які закріплені на штоці, корпус приєднаний до хвостовика, причому, у кільцевій частині хвостовика змонтовано дві електрогідравлічні розрядні камери, заповнені робочим тілом з повітряним зазором, у яких розміщені поршні, а на стінках обох електрогідравлічних камер на відстані "кроку" переміщення встановлені давачі положення [1]. Недоліком даного пристрою є низька надійність почергової фіксації його хвостової і носової частини в процесі дискретного руху, що призводить до проковзування під дією реактивних сил опору ґрунту, його фіксуючих елементів і, в кінцевому рахунку, до зміни швидкості руху. Відомий підземнорухомий пристрій, який складається з носової частини із закріпленим на ній руйнівним робочим органом, всередині якого розміщено давач - комбінований перетворювач сили у вихідний уніфікований електричний сигнал, який являє собою порожнинний пружний циліндр із закріпленими на ньому резисторами, що ввімкнені у відповідні плечі вимірювального мосту з уніфікуючим перетворювачем в його вимірювальній діагоналі, що з'єднаний з мікроконтролером, який керує виконавчим механізмом, призначеним для регулювання тиску енергоносія, що надходить від енергоблока до реверсивного розподілювача (а тим самим, в кінцевому рахунку, і регулювання швидкості руху), який з'єднаний через патрубки хвостовика з розпірними фіксуючими камерами, охоплених еластичними оболонками та двигуном [2]. Недоліком даного пристрою є відсутність можливості перерозподілу тиску енергоносія для забезпечення долання реактивних сил опору руйнування ґрунту в процесі руху. Задачею корисної моделі є забезпечення можливості автоматичного почергового створення необхідного тиску енергоносія в протифазно діючих фіксуючих камерах для гарантованого долання реактивних сил опору руйнування ґрунту, збільшення швидкості руху та зменшення енерговитратності. Поставлена задача вирішується тим, що у підземнорухомому пристрої з автоматичним керуванням дискретним переміщенням, який складається з носової частини, передньої і задньої фіксуючих камер, герметично охоплених еластичними оболонками, виконавчого механізму, блока пневматичної або гідравлічної енергії, інтелектуального програмованого мікроконтролера та двигуна, виконавчий механізм виконаний у вигляді двох незворотних і двох електромагнітних клапанів з електронними індикаторами їхнього спрацювання, на протилежних сторонах поршня двигуна розміщені давачі крайнього лівого та крайнього правого положення носової частини, а в передній фіксуючій камері встановлено давач тиску енергоносія. Створення виконавчого механізму у вигляді двох незворотних та двох електромагнітних клапанів з електронними індикаторами їхнього спрацювання дозволяє реалізувати дискретне почергове спрацювання у хронологічному порядку: задньої фіксуючої камери, двигуна, наприклад, багатоступінчастого штокопоршневого лінійного гідропневмодвигуна, який зумовлює деформування ґрунту носовою частиною та передньої фіксуючої камери для підтягування хвостової частини до фіксованої носової. Це дозволяє відповідно спрямувати енергоносій і гарантовано долати реактивні сили опору руйнування ґрунту в процесі руху та візуально спостерігати оператору за протіканням технологічного процесу. Розміщення на протилежних сторонах поршня двигуна давачів крайнього лівого і правого положення носової частини та давача тиску у передній фіксуючій камері дозволяє перетворювати ці параметри у відповідні інформаційні сигнали, на основі яких інтелектуальний програмований логічний контролер виробляє керуючі сигнали, які почергово надходять до електромагнітних клапанів. Що зумовлює відповідне спрямування енергоносія до підземнорухомого пристрою. На кресленні показано принципову схему підземнорухомого пристрою з автоматичним керуванням дискретним переміщенням. Підземнорухомий пристрій з автоматичним керуванням містить конічну носову частину 1, призначену для руйнування ґрунту, яка спереду прикріплена до передньої фіксуючої камери 2, що являє собою порожнинний циліндр з радіальними отворами, герметично охоплений еластичною оболонкою, яка механічно з'єднана зі штоком 3, багатоступінчастого штокопоршневого лінійного гідропневмодвигуна 4 і через канали всередині нього енергетично (через робоче тіло) за допомогою клапанів 5 і 6 і задньої фіксуючої камери 7, яка конструктивно є еквівалентною передній фіксуючій камері 2 і охопленою еластичною оболонкою, що через дискретні електромагнітні пристрої 8 і 9 (електромагнітні клапани), які будучи з'єднаними з виходами мікроконтролера 10 і оснащеними електронними індикаторами 11 і 12 їхнього 1 UA 67860 U 5 10 15 20 25 30 35 40 спрацювання, з'єднані через запірний механізм 13 з енергоблоком 14 пневматичної або гідравлічної енергії, причому входи мікроконтролера з'єднані з давачами 15 і 16 крайнього лівого і правого положення конічної носової частини 1 та давачем тиску 17 передньої фіксуючої камери 2. Принцип дії запропонованого підземнорухомого пристрою з автоматичним керуванням дискретним переміщенням полягає в наступному. При надходженні від енергоблока 14 через запірний механізм 13 і електромагнітний клапан 9 робочого тіла (енергоносія), еластична оболонка задньої фіксуючої камери 7 збільшуватиметься в об'ємі до впирання в стінку, попередньо утвореної носовою частиною 1 ґрунтової порожнини, в результаті досягнення в задній фіксуючій камері відповідного тиску зазначеного робочого тіла і за рахунок сил тертя фіксуватиметься. Це є можливим. Оскільки електромагнітний клапан 9 у вихідному положенні завжди відкритий (про що символізує електричний індикатор 11), в результаті командного електричного сигнала від мікроконтролера 10, який ним виробляється в результаті надходження електричного сигналу від давача 15 крайнього лівого положення носової частини 1. Електромагнітний клапан 8 в цей час є завжди закритим, про що сигналізує його індикатор 12. Після зазначеного, робоче тіло через клапан 6, який спрацьовує лише при досягненні тиску більшого за робочий тиск задньої фіксуючої камери в лінійний гідропневмодвигун 4. Це призведе до переміщення вперед на відповідну довжину ("крок") відносно фіксованої хвостової частини штока 3 разом з носовою частиною 1, що деформує ґрунт, і передньою фіксуючою камерою 2, охопленою еластичною оболонкою. При досягненні носовою частиною 1 крайнього правого положення на мікроконтролер 10 надійде сигнал від давача 16, а сигнал від давача 15 зникне, спрацює клапан 5 і енергоносій надходитиме в передню фіксуючу камеру 2, охоплену еластичною оболонкою, що приведе до зростання в цій камері тиску і збільшення в об'ємі самої еластичної оболонки до впирання в стінку ґрунтової порожнини і її фіксації. Одночасно з цим по команді від мікроконтролера 10, закриється клапан 9, відкриється клапан 8 і при досягненні заданого тиску в передній фіксуючій камері 2 і при її фіксації (про що свідчитиме сигнал від давача 17) відбудеться підтягування на "крок" хвостової частини до фіксованої носової. В цьому випадку енергоносій надходитиме вже через електромагнітний клапан 8, а відпрацьований - через хвостовик підземнорухомого пристрою. Отже, даний підземнорухомий пристрій здатний автоматично почергово створювати необхідний тиск енергоносія в протифазно діючих фіксуючих камерах та лінійному гідропневмодвигуні, що забезпечує гарантоване, без проковзування, долання реактивних сил опору ґрунту, збільшення швидкості дискретного руху і зменшення непродуктивних енерговитрат. Це дозволить підвищити його прохідну здатність в неоднорідних ґрунтах та збільшити радіус дії без поповнення енергоресурсу. Пристрій має багатоцільове призначення і може бути застосований для безтраншейного прокладання різних підземних інженерних комунікацій, кротового і матеріального дренажу, пошуку і видобутку корисних копалин, зокрема переведених у рідкий або газоподібний стан, моніторингу і захисту підземного простору України від несанкціонованого видобутку, наприклад нафти і газу, як підземний транспортний засіб тощо. Джерела інформації: 1. Деклараційний патент на корисну модель № 10111, E02F 5/18, Бюл. № 11, 2005 р. 2. Деклараційний патент на корисну модель № 41889, E02F 5/18, Бюл. № 11, 2009 р. 45 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 50 55 Підземнорухомий пристрій з автоматичною системою керування дискретним переміщенням, що складається з носової частини, передньої та задньої фіксуючих камер, герметично охоплених еластичними оболонками, виконавчого механізму, блока пневматичної або гідравлічної енергії, інтелектуального програмованого мікроконтролера та двигуна, який відрізняється тим, що виконавчий механізм виконаний у вигляді двох незворотних та двох електромагнітних клапанів з електронними індикаторами їхнього спрацювання, на протилежних сторонах поршня двигуна розміщено давачі крайнього лівого та крайнього правого положення носової частини, а в передній фіксуючій камері встановлено давач тиску енергоносія. 2 UA 67860 U Комп’ютерна верстка Л.Литвиненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюUnderground movable device with automatic control of discrete displacement
Автори англійськоюKovanko Oleh Volodymyrovych
Назва патенту російськоюПодземно-подвижное устройство с автоматическим управлением дискретным перемещением
Автори російськоюКованько Олег Владимирович
МПК / Мітки
МПК: E02F 5/18
Мітки: автоматичним, дискретним, керуванням, переміщенням, пристрій, підземнорухомий
Код посилання
<a href="https://ua.patents.su/5-67860-pidzemnorukhomijj-pristrijj-z-avtomatichnim-keruvannyam-diskretnim-peremishhennyam.html" target="_blank" rel="follow" title="База патентів України">Підземнорухомий пристрій з автоматичним керуванням дискретним переміщенням</a>
Підземнорухомий пристрій

Номер патенту: 41889
Опубліковано: 10.06.2009
Автор: Кованько Олег Володимирович
МПК: E02F 5/18
Мітки: пристрій, підземнорухомий
Формула / Реферат:
Підземнорухомий пристрій, який складається з руйнівної конусоподібної носової частини, пустотілого корпусу з секціями для розташування поршнів, хвостової розпірної частини, яка з'єднана з носовою руйнівною частиною штоком з каналами ліній живлення, який відрізняється тим, що носова частина пристрою виконана пустотілою з двох складових частин: зрізаний конусоподібний наконечник охоплено бічною поверхнею пустотілої частини конуса з кільцем...
Пристрій для очистки газів від неприємних запахів з автоматичним керуванням
Номер патенту: 45903
Опубліковано: 25.11.2009
Автори: Лустюк Микола Григорович, Христюк Андрій Олексійович
МПК: B01D 53/34
Мітки: пристрій, керуванням, очистки, неприємних, газів, автоматичним, запахів
Формула / Реферат:
Пристрій для очищення газів від неприємних запахів з автоматичним керуванням, який містить заповнений поглинаючим матеріалом корпус з вхідним та вихідним отворами, з сітчастими кришками на обох отворах, між якими розташований вал з елементом для розпушення з можливістю його одночасного обертового та поступального руху, та з форсунками для вприскування рідини у верхній частині корпусу, який відрізняється тим, що на виході пристрою встановлені...
Реверсивний підземнорухомий пристрій
Номер патенту: 42104
Опубліковано: 25.06.2009
Автори: Древецький Володимир Володимирович, Кованько Олег Володимирович, Кованько Володимир Володимирович
МПК: E02F 5/18
Мітки: підземнорухомий, пристрій, реверсивний
Формула / Реферат:
Реверсивний підземнорухомий пристрій, який складається з пустотілого корпуса і зв'язаного з ним робочого органу у вигляді конічної передньої частини і хвостової розпірної частини, виконаної у вигляді герметично охопленого еластичною оболонкою пустотілого перфорованого циліндра, системи живлення стиснутим середовищем з каналами і лінією, яка з'єднується з хвостовою розпірною частиною і порожниною корпуса, циліндричної розпірної частини та...
Малогабаритний токарний верстат з автоматичним переміщенням супорта та задньої бабки
Номер патенту: 56165
Опубліковано: 15.05.2003
Автор: Романіка Костянтин Васильович
МПК: B23B 3/00
Мітки: переміщенням, супорта, малогабаритний, токарний, задньої, верстат, бабки, автоматичним
Формула / Реферат:
1. Малогабаритний токарний верстат з автоматичним переміщенням супорта та задньої бабки, до якого входять станина, передня бабка, упорно-напрямні планки, задня бабка та супорт, що складається з основи, виконаної з можливістю лінійного переміщення паралельно до осі шпинделя та перпендикулярного переміщення зміною довжини упорної колонки, повернутої в бік передньої бабки, та різцетримач, на кожній стороні нижньої частини якого встановлено по...
Гідропрес з автоматичним керуванням
Номер патенту: 59512
Опубліковано: 10.05.2011
Автори: Гутько Юрій Іванович, Соколова Яна Володимирівна, Таванюк Тетяна Яківна, Рей Роман Іванович, Соколов Володимир Ілліч
МПК: B30B 15/16
Мітки: керуванням, автоматичним, гідропрес
Формула / Реферат:
Гідропрес з автоматичним керуванням, що містить робочий орган, з'єднаний з двигуном, та автоматичний привод, який відрізняється тим, що у пристрої розташовано датчик зворотного зв'язку за переміщенням робочого органу.
Попередній патент: 3,4-диметил-1-етилциклогекс-3-енкарбонова кислота
Наступний патент: Пристрій для створення високоградієнтного магнітного поля в лунках біологічного планшету
Випадковий патент: Пристрій для нвч-нагріву рідинних продуктів