Датчик переміщень


Формула / Реферат
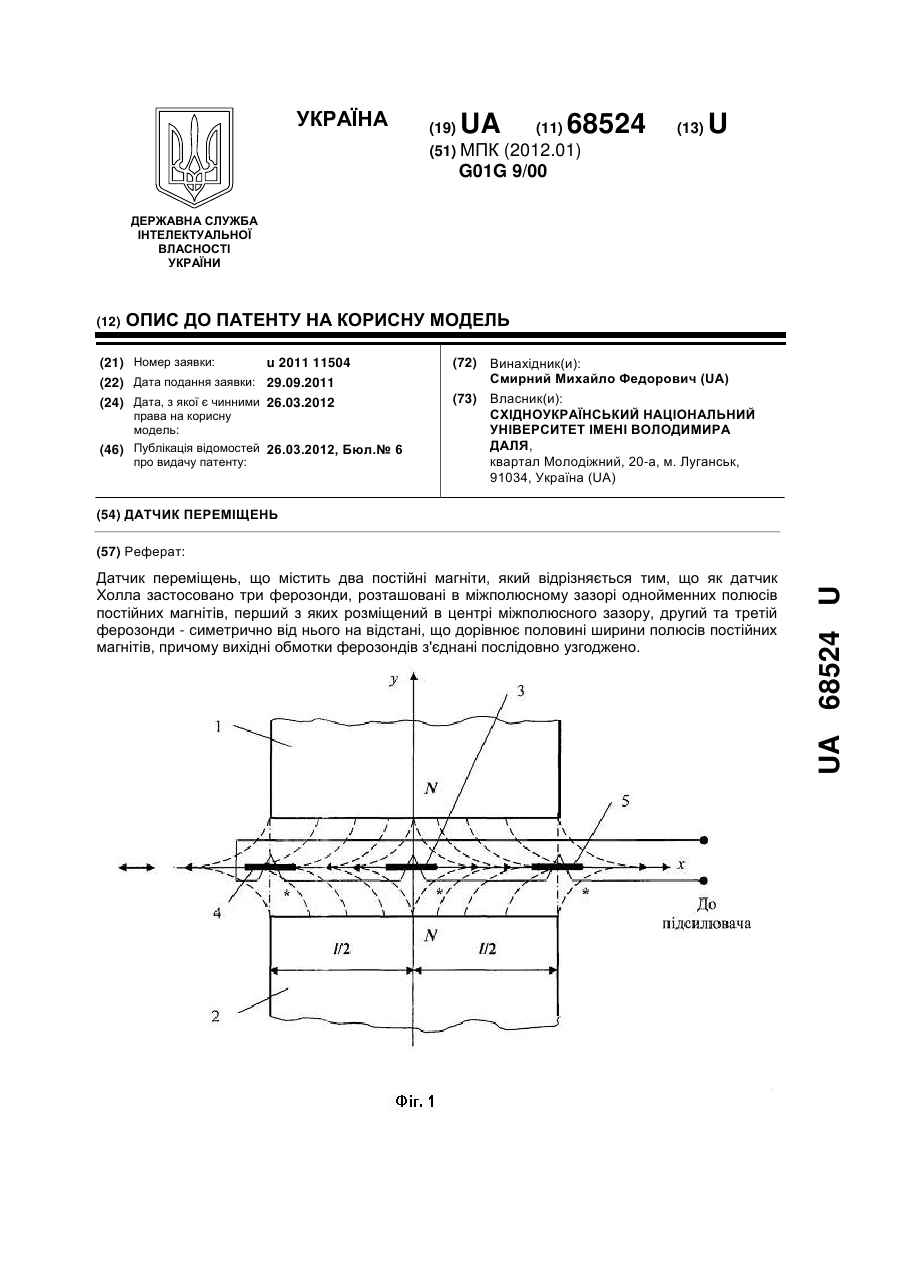
Датчик переміщень, що містить два постійні магніти, який відрізняється тим, що як датчик Холла застосовано три ферозонди, розташовані в міжполюсному зазорі однойменних полюсів постійних магнітів, перший з яких розміщений в центрі міжполюсного зазору, другий та третій ферозонди - симетрично від нього на відстані, що дорівнює половині ширини полюсів постійних магнітів, причому вихідні обмотки ферозондів з'єднані послідовно узгоджено.
Текст
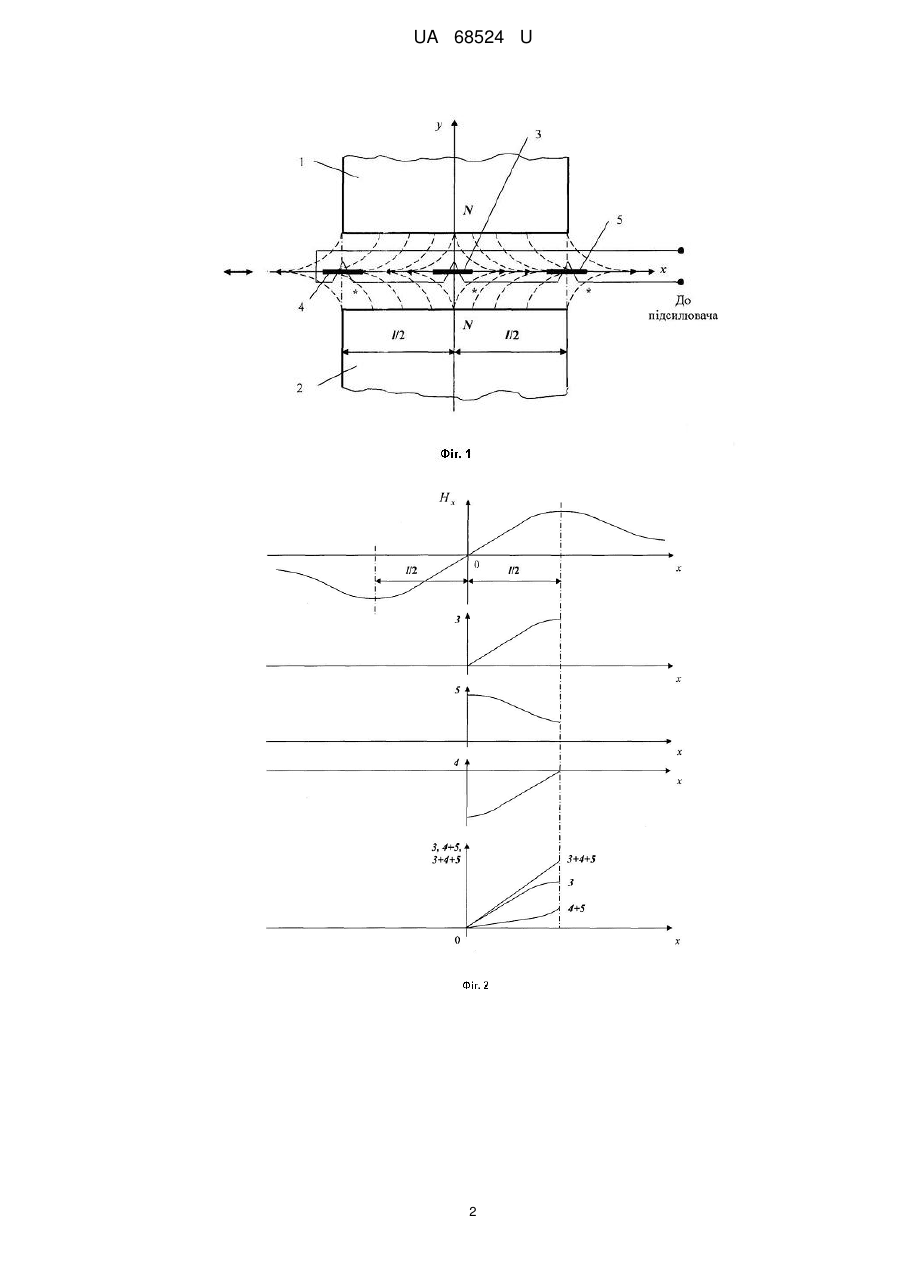
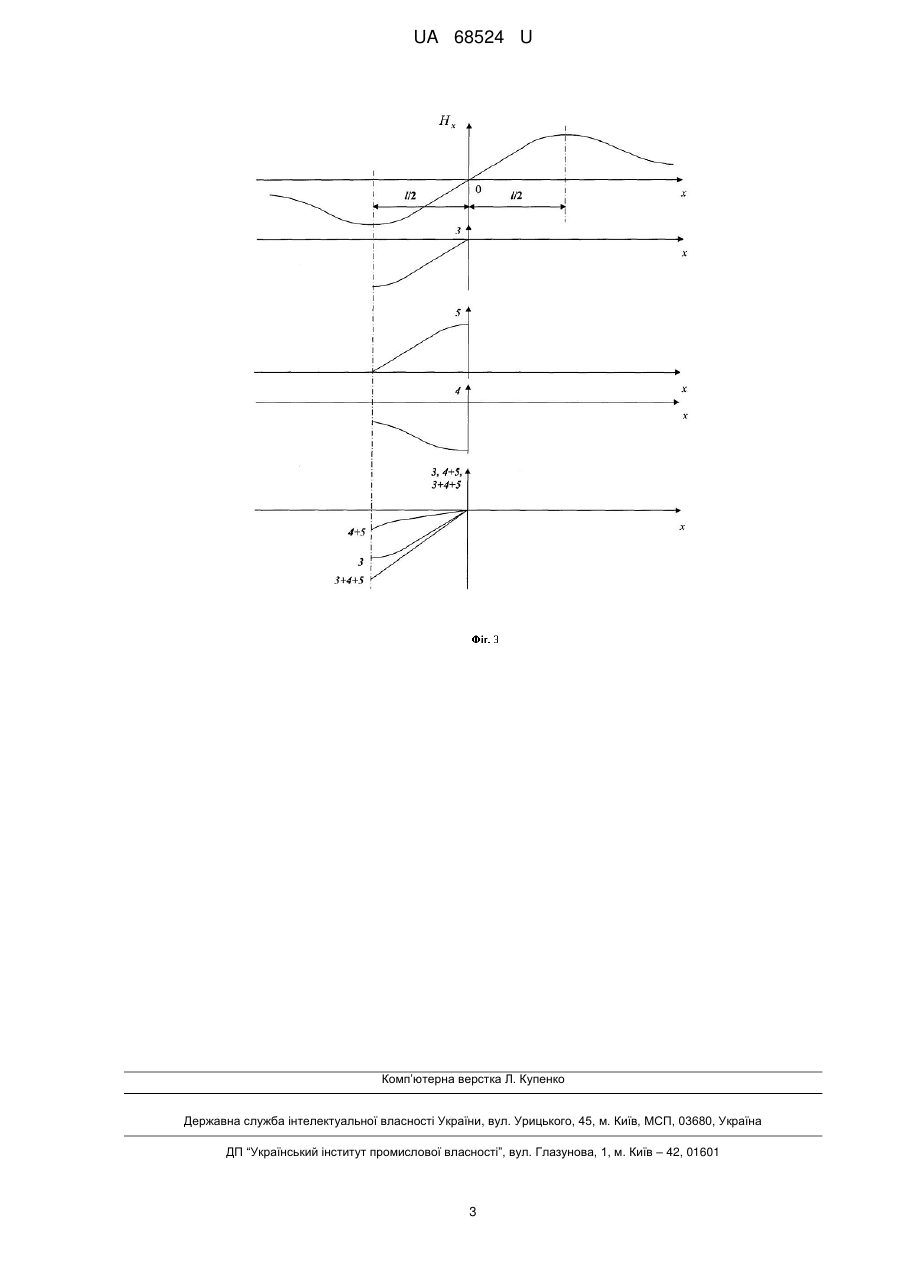
Реферат: UA 68524 U UA 68524 U 5 10 15 20 25 30 35 40 Корисна модель належить до вимірювальної техніки та може бути використана для вимірювання переміщень. Відомий датчик переміщень, що містить два постійні магніти, у міжполюсному зазорі однойменних полюсів яких розташований датчик Холла [див. Хомерики O.К. Применение гальваномагнитных датчиков в устройствах автоматики и измерений. - М.: Энергия, 1971. - 112 с.]. Цей датчик вибрано за прототип. Недоліком відомого датчика переміщень є те, що датчик Холла має низьку чутливість, через напругу нееквіпотенційності не забезпечує високої точності роботи датчика переміщень, який крім того має недостатню лінійність метрологічної характеристики. В основу корисної моделі поставлено задачу вдосконалення датчика переміщень шляхом того, що як датчик Холла застосовано три ферозонди, розташовані в міжполюсному зазорі постійних магнітів, перший з яких розміщений в центрі міжполюсного зазору, другий та третій ферозонди - симетрично від нього на відстані, що дорівнює половині ширини полюсів постійних магнітів, що дозволить підвищити чутливість роботи датчика переміщень та лінійність його метрологічної характеристики. Поставлена задача вирішується тим, що у датчику переміщень, що містить два постійні магніти, згідно з корисною моделлю, як датчик Холла застосовано три ферозонди, розташовані в міжполюсному зазорі однойменних полюсів постійних магнітів, перший з яких розміщений в центрі міжполюсного зазору, другий та третій ферозонди - симетрично від нього на відстані, що дорівнює половині ширині полюсів постійних магнітів, причому вихідні обмотки ферозондів з'єднані послідовно узгоджено. Суть корисної моделі пояснюється кресленням (фіг. 1), де зображено датчик переміщення, що містить два постійні магніти 1 та 2, ферозонди 3-5, перший 3 з яких розташовано в центрі міжполюсного зазору однойменних полюсів постійних магнітів 1 та 2, другий 4 та третій 5 ферозонди розміщені симетрично від центру міжполюсного зазору на відстані, що дорівнює половині ширини полюсів постійних магнітів 1 та 2, при цьому вихідні обмотки ферозондів 3-5 з'єднані послідовно узгоджено. При цьому ферозонди 3-5 зчитують горизонтальну складову напруженості Нх магнітного поля. На фіг. 2 та фіг. 3 наведено діаграми роботи датчика переміщень. Датчик переміщень працює наступним чином. При переміщенні, що дорівнює нулю, на вихідній обмотці першого ферозонда 3 сигнал дорівнює нулю, а на вихідних обмотках другого та третього ферозондів 4 та 5 сигнали мають однакові абсолютні величини протилежних знаків, тому результівний сигнал датчика дорівнює нулю. При переміщенні ферозондів 3-5 відносно постійних магнітів 1 та 2 вздовж осі х праворуч на вихідній обмотці першого ферозонда 3 сигнал збільшується (епюра 3, фіг. 2), на вихідних обмотках третього та другого ферозондів 5 та 4 сигнали зменшуються (епюри 5, 4, фіг. 2). Результівний сигнал ферозондів 3-5 пропорційний величині переміщення, він алгебраїчно підсумовується (епюра 3+4+5, фіг. 2), що призводить до збільшення корисного сигналу та лінеаризації метрологічної характеристики датчика переміщень. При переміщенні ферозондів 3-5 відносно постійних магнітів 1 та 2 вздовж осі х ліворуч датчик переміщень працює аналогічно (епюри 3, 5, 4, 3+4+5, фіг. 3). ФОРМУЛА КОРИСНОЇ МОДЕЛІ 45 Датчик переміщень, що містить два постійні магніти, який відрізняється тим, що як датчик Холла застосовано три ферозонди, розташовані в міжполюсному зазорі однойменних полюсів постійних магнітів, перший з яких розміщений в центрі міжполюсного зазору, другий та третій ферозонди - симетрично від нього на відстані, що дорівнює половині ширини полюсів постійних магнітів, причому вихідні обмотки ферозондів з'єднані послідовно узгоджено. 1 UA 68524 U 2 UA 68524 U Комп’ютерна верстка Л. Купенко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюDisplacement transducer
Автори англійськоюSmyrnyi Mykhailo Fedorovych
Назва патенту російськоюДатчик перемещений
Автори російськоюСмирный Михаил Федорович
МПК / Мітки
МПК: G01G 9/00
Мітки: датчик, переміщень
Код посилання
<a href="https://ua.patents.su/5-68524-datchik-peremishhen.html" target="_blank" rel="follow" title="База патентів України">Датчик переміщень</a>
Датчик переміщень

Номер патенту: 64736
Опубліковано: 10.11.2011
Автор: Смірний Михайло Федорович
МПК: G01G 9/00
Мітки: датчик, переміщень
Формула / Реферат:
Датчик переміщень, що містить два пристиковані один до одного С-подібні постійні магніти, який відрізняється тим, що як датчик Холла застосовано три ферозонди, розташовані в міжполюсному зазорі С-подібних постійних магнітів, перший з яких розміщений в центрі міжполюсного зазору, другий та третій ферозонди - симетрично від нього на відстані, що дорівнює ширині полюса постійного магніту, причому вихідні обмотки ферозондів з'єднані...
Датчик переміщень
Номер патенту: 64735
Опубліковано: 10.11.2011
Автор: Смірний Михайло Федорович
МПК: G01G 9/00
Мітки: переміщень, датчик
Формула / Реферат:
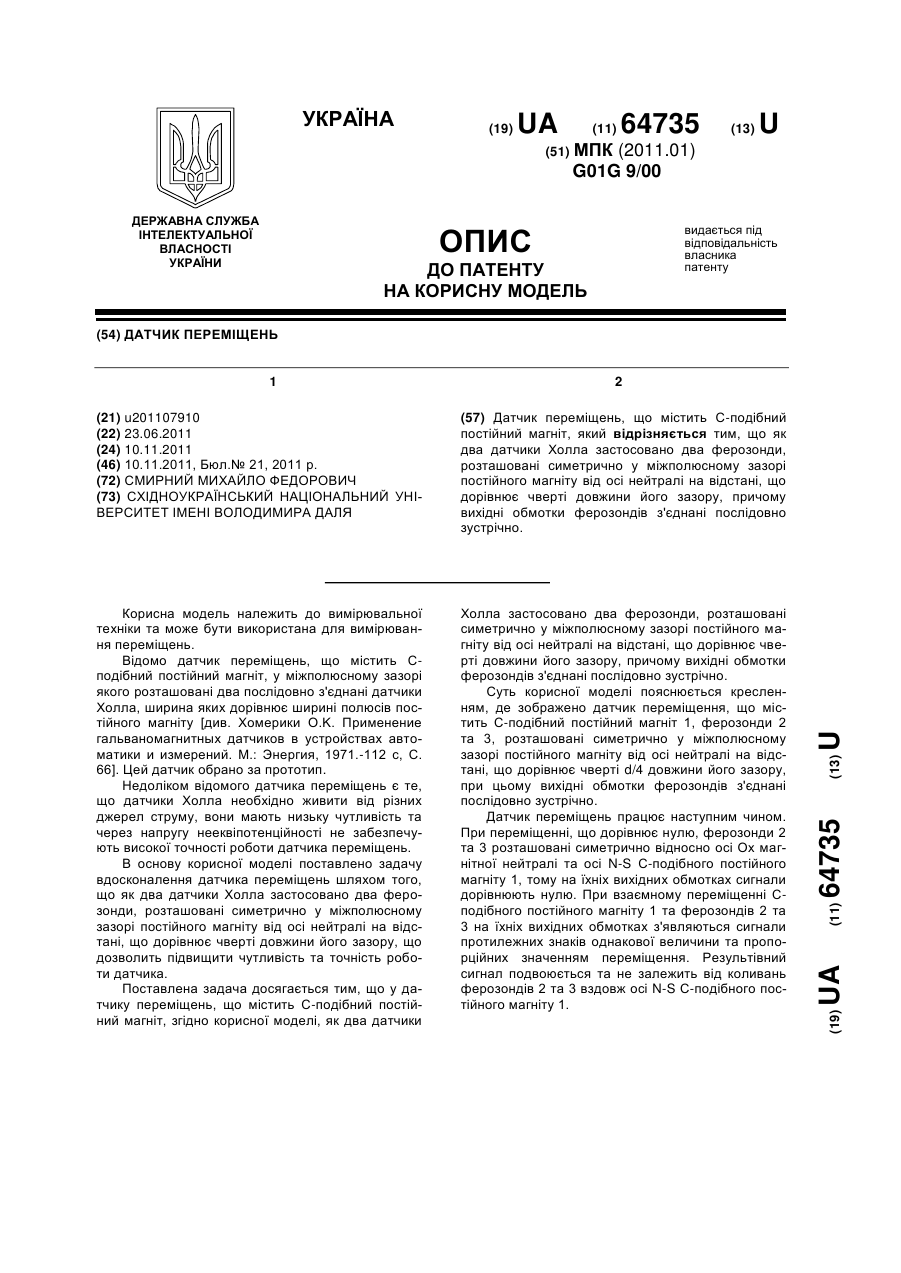
Датчик переміщень, що містить С-подібний постійний магніт, який відрізняється тим, що як два датчики Холла застосовано два ферозонди, розташовані симетрично у міжполюсному зазорі постійного магніту від осі нейтралі на відстані, що дорівнює чверті довжини його зазору, причому вихідні обмотки ферозондів з'єднані послідовно зустрічно.
Датчик
Номер патенту: 66769
Опубліковано: 10.01.2012
Автор: Смірний Михайло Федорович
МПК: G01G 9/00
Мітки: датчик
Формула / Реферат:
Датчик, що містить першу пару постійних магнітів, однойменні полюси яких розміщені один проти одного, який відрізняється тим, що розташовано додаткову другу пару постійних магнітів, однойменні полюси яких також розміщені один проти одного, а як перетворювач Холла застосовано два градієнтометри, розташовані співвісно та перпендикулярно один до одного у центрі міжполюсного зазору постійних магнітів.
Мікрохвильовий датчик переміщень
Номер патенту: 25479
Опубліковано: 30.10.1998
Автори: Голинський Василь Дмитрович, Сторож Володимир Георгійович, Проць Роман Володимирович
МПК: H02J 3/26
Мітки: датчик, переміщень, мікрохвильовий
Формула / Реферат:
Мікрохвильовий датчик переміщень, що складається з мікрохвильового генератора, з'єднаного з першим входом антени та детектором, та компаратора, який відрізняється тим, що в нього додатково введені генератор комутуючої напруги, комутатор діаграми спрямованості антени і послідовно з'єднані смуговий підсилювач змінної напруги, синхронний детектор і фільтр низької частоти, які ввімкнені між детектором і компаратором, причому вихід генератора...
Датчик кутових переміщень з електронною схемою визначення кута нахилу
Номер патенту: 50687
Опубліковано: 15.10.2002
Автори: Галицький Анатолій Петрович, Павленко Юрій Федорович
МПК: G01P 15/13
Мітки: датчик, електронною, нахилу, схемою, кутових, кута, переміщень, визначення
Формула / Реферат:
Датчик кутових переміщень, що містить механічну частину, що складається з маятника, підвішеного на, щонайменше, одній балці, двох котушок індуктивності, що входять до складу датчиків відхилення маятника від середнього положення, і двигуна лінійного типу, що має котушку індуктивності, розташовану на маятнику, і два магніти з зустрічно орієнтованими полями, які розташовані з боків котушки і закріплені нерухомо, і електронну частину, що включає...
Попередній патент: Пристрій для зчитування магнітного запису з промислових конструкцій
Наступний патент: Пристрій для запису та зчитування інформації з магнітного носія
Випадковий патент: Спосіб інтраопераційного захисту легень при хірургічному лікуванні інфекційного ендокардиту