Спосіб визначення відхилення змінної величини від встановленого рівня

Формула / Реферат
Спосіб визначення відхилення змінної величини від встановленого рівня, що включає інтегрування різниці поточного значення змінного сигналу й уставки, інтегрування контрольованого сигналу, обмеженого встановленим рівнем, який відрізняється тим, що діапазон інтегрування обмежено узгодженими значеннями інтеграла й тривалості півперіоду, одержаного за номінальною величиною контрольованого сигналу, інтегрування починається з нижньої межі діапазону інтегрування, значення відхилення змінної величини від встановленого рівня залежить від моменту досягнення результатом інтегрування вихідного значення.
Текст
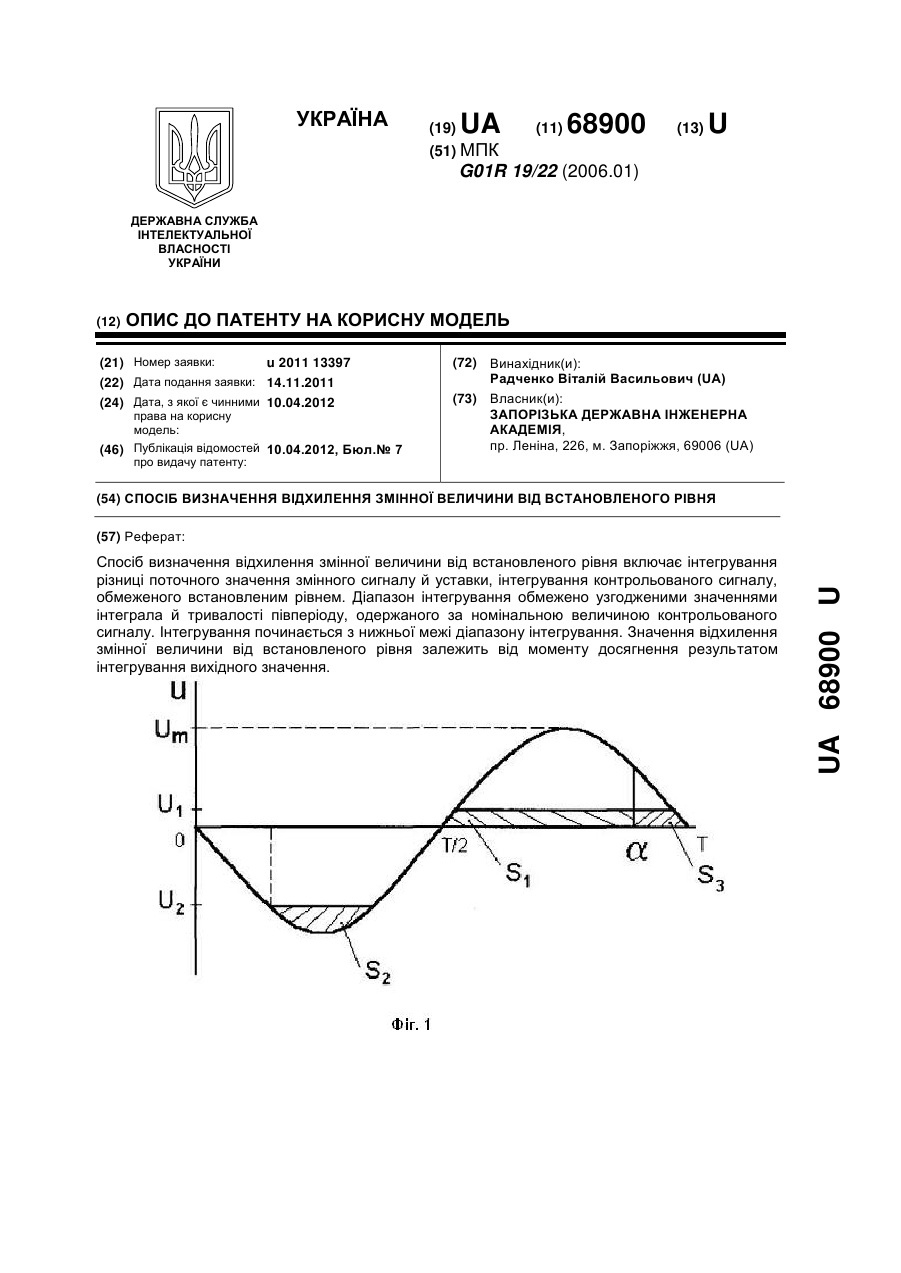
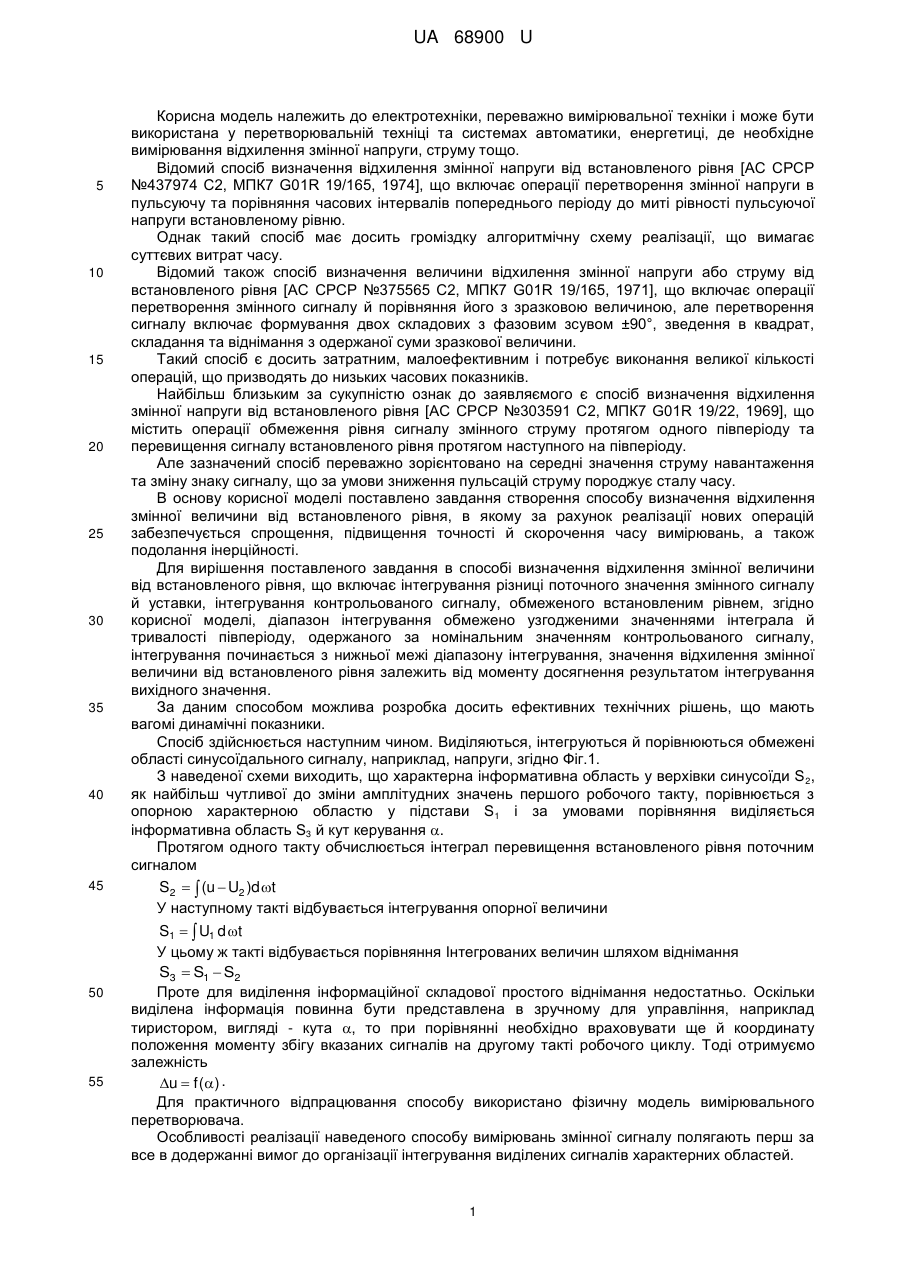
Реферат: UA 68900 U UA 68900 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до електротехніки, переважно вимірювальної техніки і може бути використана у перетворювальній техніці та системах автоматики, енергетиці, де необхідне вимірювання відхилення змінної напруги, струму тощо. Відомий спосіб визначення відхилення змінної напруги від встановленого рівня [АС СРСР №437974 С2, МПК7 G01R 19/165, 1974], що включає операції перетворення змінної напруги в пульсуючу та порівняння часових інтервалів попереднього періоду до миті рівності пульсуючої напруги встановленому рівню. Однак такий спосіб має досить громіздку алгоритмічну схему реалізації, що вимагає суттєвих витрат часу. Відомий також спосіб визначення величини відхилення змінної напруги або струму від встановленого рівня [АС СРСР №375565 С2, МПК7 G01R 19/165, 1971], що включає операції перетворення змінного сигналу й порівняння його з зразковою величиною, але перетворення сигналу включає формування двох складових з фазовим зсувом ±90°, зведення в квадрат, складання та віднімання з одержаної суми зразкової величини. Такий спосіб є досить затратним, малоефективним і потребує виконання великої кількості операцій, що призводять до низьких часових показників. Найбільш близьким за сукупністю ознак до заявляємого є спосіб визначення відхилення змінної напруги від встановленого рівня [АС СРСР №303591 С2, МПК7 G01R 19/22, 1969], що містить операції обмеження рівня сигналу змінного струму протягом одного півперіоду та перевищення сигналу встановленого рівня протягом наступного на півперіоду. Але зазначений спосіб переважно зорієнтовано на середні значення струму навантаження та зміну знаку сигналу, що за умови зниження пульсацій струму породжує сталу часу. В основу корисної моделі поставлено завдання створення способу визначення відхилення змінної величини від встановленого рівня, в якому за рахунок реалізації нових операцій забезпечується спрощення, підвищення точності й скорочення часу вимірювань, а також подолання інерційності. Для вирішення поставленого завдання в способі визначення відхилення змінної величини від встановленого рівня, що включає інтегрування різниці поточного значення змінного сигналу й уставки, інтегрування контрольованого сигналу, обмеженого встановленим рівнем, згідно корисної моделі, діапазон інтегрування обмежено узгодженими значеннями інтеграла й тривалості півперіоду, одержаного за номінальним значенням контрольованого сигналу, інтегрування починається з нижньої межі діапазону інтегрування, значення відхилення змінної величини від встановленого рівня залежить від моменту досягнення результатом інтегрування вихідного значення. За даним способом можлива розробка досить ефективних технічних рішень, що мають вагомі динамічні показники. Спосіб здійснюється наступним чином. Виділяються, інтегруються й порівнюються обмежені області синусоїдального сигналу, наприклад, напруги, згідно Фіг.1. З наведеної схеми виходить, що характерна інформативна область у верхівки синусоїди S 2, як найбільш чутливої до зміни амплітудних значень першого робочого такту, порівнюється з опорною характерною областю у підстави S 1 і за умовами порівняння виділяється інформативна область S3 й кут керування . Протягом одного такту обчислюється інтеграл перевищення встановленого рівня поточним сигналом S2 (u U2 )d t У наступному такті відбувається інтегрування опорної величини S1 U1 d t У цьому ж такті відбувається порівняння Інтегрованих величин шляхом віднімання S3 S1 S2 Проте для виділення інформаційної складової простого віднімання недостатньо. Оскільки виділена інформація повинна бути представлена в зручному для управління, наприклад тиристором, вигляді - кута , то при порівнянні необхідно враховувати ще й координату положення моменту збігу вказаних сигналів на другому такті робочого циклу. Тоді отримуємо залежність u f () . Для практичного відпрацювання способу використано фізичну модель вимірювального перетворювача. Особливості реалізації наведеного способу вимірювань змінної сигналу полягають перш за все в додержанні вимог до організації інтегрування виділених сигналів характерних областей. 1 UA 68900 U Таким вимогам відповідає інтегратор з обмеженнями, що придатний для обробки сигналів. x Z( x ) y dx , 0 5 10 15 20 де х, у, Z - відповідно незалежна змінна, інтегрована функція і інтеграл. Реальний інтегратор в процесі роботи здійснює перетворення не початкових змінних х, у, z, а однозначно відповідних ним параметрів,наприклад, амплітуди напруги, тривалість імпульсу і ін., яка в даному випадку є машинними змінними. Початкові математичні або фізичні змінні при цьому зв'язуються з машинними змінними масштабними співвідношеннями вигляду M Фізичну модель швидкодіючого вимірювального перетворювача змінної напруги в кут керування тиристором розроблено й виконано на основі магнітного інтегратора - елемента з прямокутною петлею гістерезису (ППГ), Фіг.2. Особливістю такого рішення є реалізація тактового режиму перемагнічення, що відповідає робочим тактам вимірювань. Робочий цикл при цьому дорівнює періоду змінної напруги. Стан насичення в точці 3 досягається протягом другого півперіоду й за рахунок зміни опору магнітного елемента (ключового режиму) формується кут керування . При цьому, кут насичення інтегратора визначається за формулою w S BS S e В залежності від прикладеної напруги змінюється кут насичення узгоджений в межах півперіода й, відповідно, момент появи вихідного сигналу. Умову почала формування сигналу відхилення протягом періоду B1 B2 , де B1 та B 2 , відповідно зміни магнітного стану протягом першого та другого півперіодів. Таким чином, для інтегратора у вигляді магнітного елементу (ME), можливо записати t 25 dB k MEdt 0 Інтегральне відхилення напруги при цьому складає S 0 0 G U2 dt U1 dt . 30 35 Відмінною здатністю розробленого методу є те, що діапазон інтегрування обмежено узгодженими значеннями інтеграла й тривалості півперіоду, одержаного за номінальним значенням контрольованого сигналу, інтегрування починається з нижньої межі діапазону інтегрування, значення відхилення змінної величини від встановленого рівня залежить від моменту досягнення результатом інтегрування вихідного значення. Використання обмеженого інтегрування є основною умовою реалізації метода. Метод апробовано у лабораторних умовах. За даною корисною моделлю вимірювальні органи змінних сигналів, що виконані за методом мають високі динамічні властивості і призначені для систем збудження генераторів змінного струму. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 40 45 Спосіб визначення відхилення змінної величини від встановленого рівня, що включає інтегрування різниці поточного значення змінного сигналу й уставки, інтегрування контрольованого сигналу, обмеженого встановленим рівнем, який відрізняється тим, що діапазон інтегрування обмежено узгодженими значеннями інтеграла й тривалості півперіоду, одержаного за номінальною величиною контрольованого сигналу, інтегрування починається з нижньої межі діапазону інтегрування, значення відхилення змінної величини від встановленого рівня залежить від моменту досягнення результатом інтегрування вихідного значення. 2 UA 68900 U Комп’ютерна верстка А. Рябко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determination of deflection of variable value from set level
Автори англійськоюRadchenko Vitalii Vasyliovych
Назва патенту російськоюСпособ определения отклонения переменной величины от установленного уровня
Автори російськоюРадченко Виталий Васильевич
МПК / Мітки
МПК: G01R 19/22
Мітки: встановленого, визначення, відхілення, величини, рівня, спосіб, змінної
Код посилання
<a href="https://ua.patents.su/5-68900-sposib-viznachennya-vidkhilennya-zminno-velichini-vid-vstanovlenogo-rivnya.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення відхилення змінної величини від встановленого рівня</a>
Спосіб визначення величини відхилення колон гідравлічного преса від геометричної осі
Номер патенту: 51523
Опубліковано: 26.07.2010
Автор: Корчак Олена Сергіївна
МПК: B21B 15/00
Мітки: геометричної, колон, спосіб, визначення, осі, преса, гідравлічного, відхілення, величини
Формула / Реферат:
Спосіб визначення величини відхилення колон гідравлічного преса від геометричної осі, що полягає у здійсненні постійного контролю величини відхилення колон при їхній деформації, передачі цих даних аналого-цифровому перетворювачу, що на виході перетворює величини відхилення колон від вихідної подовжньої геометричної осі у відповідні сигнали і передає їх у мікропроцесор, де відбувається постійне порівняння поточного відхилення геометричної осі...
Експериментальна установка для визначення величини відхилення елемента ураження
Номер патенту: 81879
Опубліковано: 11.02.2008
Автори: Топчій Роман Іванович, Ковтун Анатолій Васильович
МПК: F41G 3/26
Мітки: відхілення, елемента, експериментальна, ураження, величини, установка, визначення
Формула / Реферат:
Експериментальна установка для визначення величини відхилення елемента ураження, що включає основу, імітатор зброї, який кріпиться за допомогою фіксатора на кронштейні, встановленому на основі, аеродинамічну трубу витоку газу, яка розміщена на стержні, закріпленому на основі, і встановлена напроти стрільця, а також мішень, яка відрізняється тим, що в неї додатково введені встановлені на основі між імітатором зброї і мішенню подовжні напрямні,...
Пристрій для калібрування величини змінної напруги
Номер патенту: 89580
Опубліковано: 10.02.2010
Автор: Тесик Юрій Федорович
МПК: G01R 21/06
Мітки: калібрування, величини, напруги, змінної, пристрій
Формула / Реферат:
Пристрій для калібрування величини змінної напруги, що містить джерело каліброваної постійної напруги з виводами позитивного і негативного потенціалів та два комутатори, перший з яких першим аналоговим виводом сполучений з виводом позитивного потенціалу джерела каліброваної постійної напруги, який відрізняється тим, що в нього додатково введені два конденсатори, ємності яких рівні між собою, чотири комутатори, котушка індуктивності,...
Пристрій для калібрування величини змінної напруги
Номер патенту: 37410
Опубліковано: 25.11.2008
Автор: Тесик Юрій Федорович
МПК: G01R 21/00
Мітки: величини, пристрій, напруги, змінної, калібрування
Формула / Реферат:
Пристрій для калібрування величини змінної напруги, що складається з джерела постійної каліброваної напруги U=, яке має вивід позитивного і вивід негативного потенціалів та двох комутаторів, перший з яких першим аналоговим виводом зв'язаний з виводом позитивного потенціалу джерела каліброваної постійної напруги, який відрізняється тим, що в нього додатково введено два конденсатори С1, С2, ємності яких рівні між собою, чотири комутатори,...
Пристрій для регулювання величини змінної напруги
Номер патенту: 67807
Опубліковано: 12.03.2012
Автори: Можаровський Анатолій Григорович, Халіков Володимир Акнафович, Липківський Костянтин Олександрович
МПК: G05F 3/00
Мітки: напруги, величини, регулювання, пристрій, змінної
Формула / Реферат:
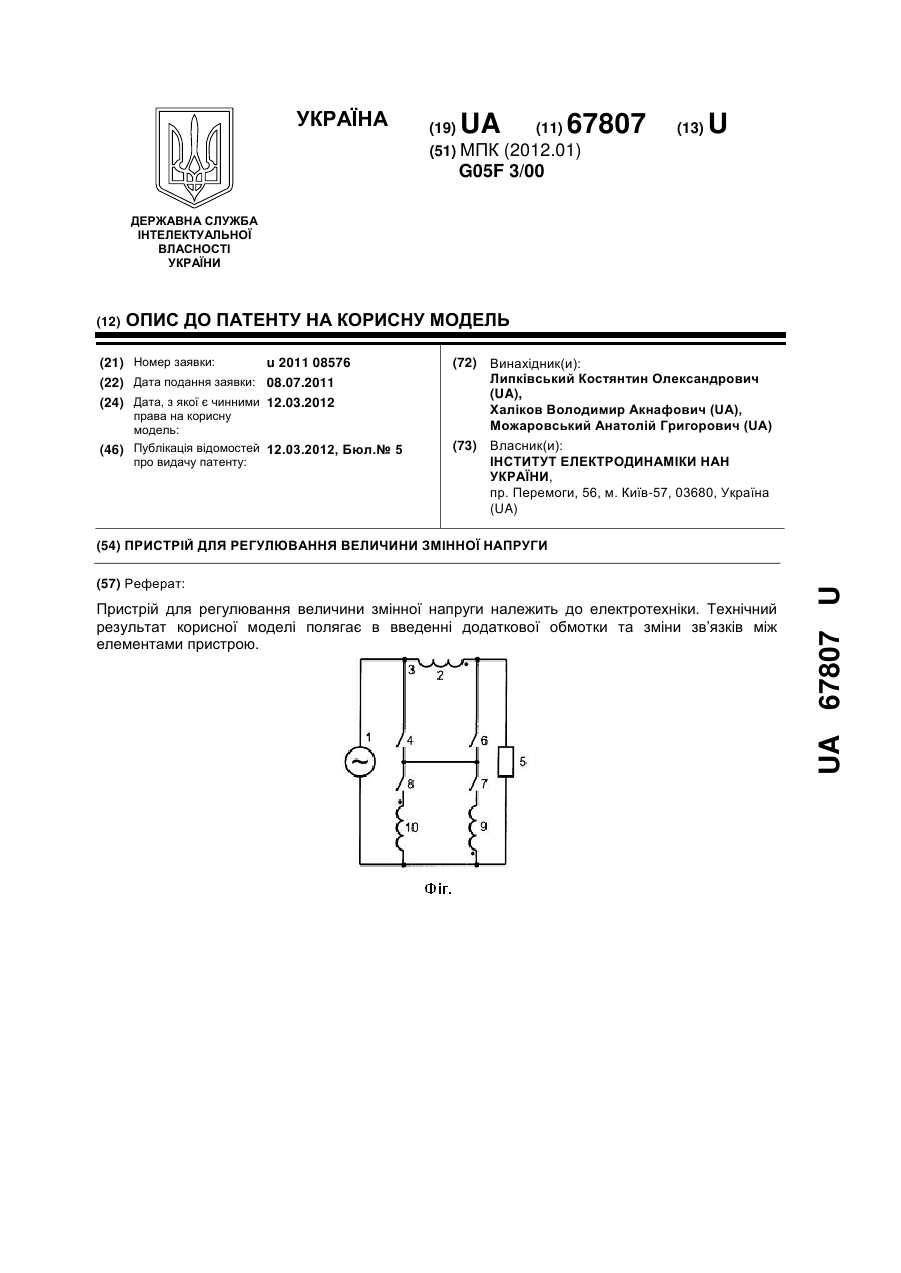
Пристрій для регулювання величини змінної напруги, що містить джерело змінної напруги, коло регулювання напруги, яке здійснює перша обмотка трансформатора, немаркований вивід якої приєднано до першого виводу джерела напруги та першого керованого ключа з двосторонньою провідністю, маркований вивід першої обмотки трансформатора приєднано до першого виводу навантаження та третього керованого ключа з двосторонньою провідністю, вільний вивід...
Попередній патент: Речовина з антигіпоксичними та антиоксидантними властивостями, що може бути використана в комплексній терапії гострого респіраторного дистрес-синдрому
Наступний патент: Трикомпонентний зонд радіоізотопного каротажу для комплексного дослідження ґрунтів
Випадковий патент: Спосіб виготовлення мікромініатюрного теплообмінника