Газодинамічний пристрій зльоту літального апарата
Номер патенту: 70881
Опубліковано: 25.06.2012
Автори: Тупіцин Микола Федорович, Харченко Володимир Петрович, Матійчик Михайло Петрович, Варченко Олег Іванович, Азарсков Валерій Миколайович, Синєглазов Віктор Михайлович

Формула / Реферат
Газодинамічний пристрій зльоту літального апарата, що складається з несучої платформи на двох надувних балонах та газодинамічної установки, який відрізняється тим, що несуча платформа містить дві - верхню і нижню - перфоровані пластини, які з'єднані з однієї сторони через стійку з шарніром і одним гідравлічним підйомником, а з іншої - з другим гідравлічним підйомником, причому на ребрах верхньої перфорованої пластини на динамічному приводі розміщена газодинамічна установка, яка є основною, а на нижній перфорованій пластині, що закріплена зверху на двох надувних балонах, на динамічному приводі розміщена додаткова газодинамічна установка.
Текст
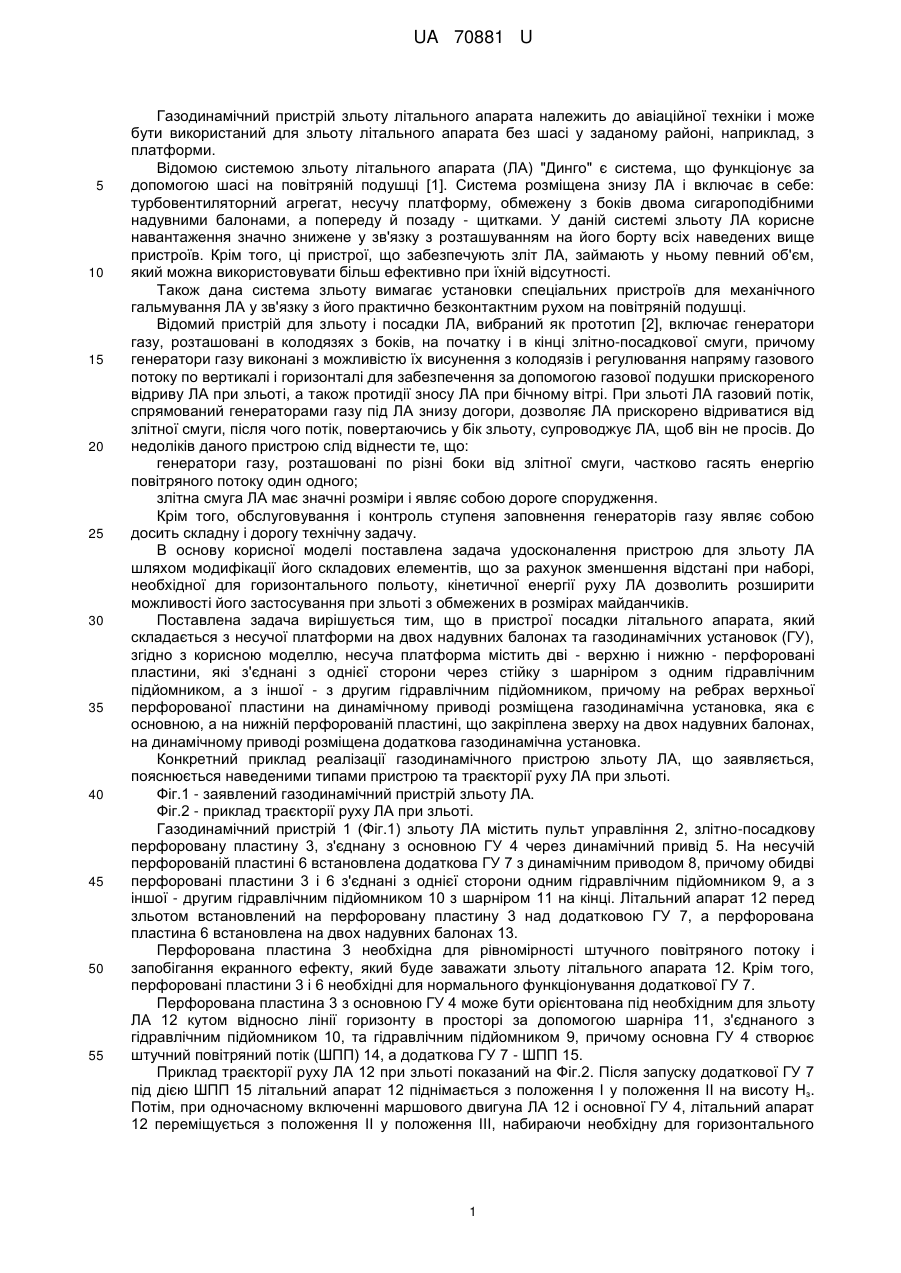
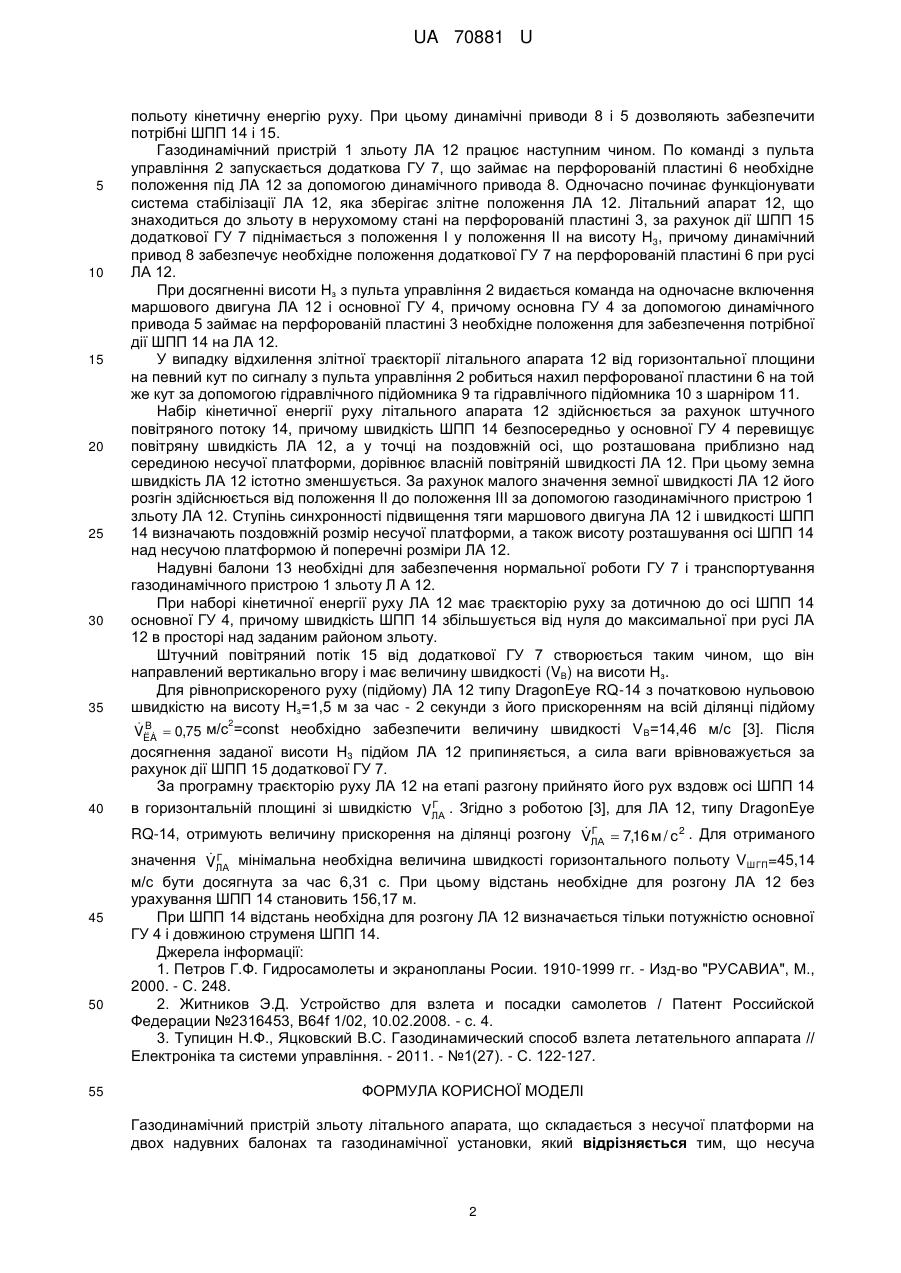
Реферат: Газодинамічний пристрій зльоту літального апарата складається з несучої платформи на двох надувних балонах та газодинамічної установки. Несуча платформа містить дві - верхню і нижню - перфоровані пластини, які з'єднані з однієї сторони через стійку з шарніром і одним гідравлічним підйомником, а з іншої - з другим гідравлічним підйомником. UA 70881 U (54) ГАЗОДИНАМІЧНИЙ ПРИСТРІЙ ЗЛЬОТУ ЛІТАЛЬНОГО АПАРАТА UA 70881 U UA 70881 U 5 10 15 20 25 30 35 40 45 50 55 Газодинамічний пристрій зльоту літального апарата належить до авіаційної техніки і може бути використаний для зльоту літального апарата без шасі у заданому районі, наприклад, з платформи. Відомою системою зльоту літального апарата (ЛА) "Динго" є система, що функціонує за допомогою шасі на повітряній подушці [1]. Система розміщена знизу ЛА і включає в себе: турбовентиляторний агрегат, несучу платформу, обмежену з боків двома сигароподібними надувними балонами, а попереду й позаду - щитками. У даній системі зльоту ЛА корисне навантаження значно знижене у зв'язку з розташуванням на його борту всіх наведених вище пристроїв. Крім того, ці пристрої, що забезпечують зліт ЛА, займають у ньому певний об'єм, який можна використовувати більш ефективно при їхній відсутності. Також дана система зльоту вимагає установки спеціальних пристроїв для механічного гальмування ЛА у зв'язку з його практично безконтактним рухом на повітряній подушці. Відомий пристрій для зльоту і посадки ЛА, вибраний як прототип [2], включає генератори газу, розташовані в колодязях з боків, на початку і в кінці злітно-посадкової смуги, причому генератори газу виконані з можливістю їх висунення з колодязів і регулювання напряму газового потоку по вертикалі і горизонталі для забезпечення за допомогою газової подушки прискореного відриву ЛА при зльоті, а також протидії зносу ЛА при бічному вітрі. При зльоті ЛА газовий потік, спрямований генераторами газу під ЛА знизу догори, дозволяє ЛА прискорено відриватися від злітної смуги, після чого потік, повертаючись у бік зльоту, супроводжує ЛА, щоб він не просів. До недоліків даного пристрою слід віднести те, що: генератори газу, розташовані по різні боки від злітної смуги, частково гасять енергію повітряного потоку один одного; злітна смуга ЛА має значні розміри і являє собою дороге спорудження. Крім того, обслуговування і контроль ступеня заповнення генераторів газу являє собою досить складну і дорогу технічну задачу. В основу корисної моделі поставлена задача удосконалення пристрою для зльоту ЛА шляхом модифікації його складових елементів, що за рахунок зменшення відстані при наборі, необхідної для горизонтального польоту, кінетичної енергії руху ЛА дозволить розширити можливості його застосування при зльоті з обмежених в розмірах майданчиків. Поставлена задача вирішується тим, що в пристрої посадки літального апарата, який складається з несучої платформи на двох надувних балонах та газодинамічних установок (ГУ), згідно з корисною моделлю, несуча платформа містить дві - верхню і нижню - перфоровані пластини, які з'єднані з однієї сторони через стійку з шарніром з одним гідравлічним підйомником, а з іншої - з другим гідравлічним підйомником, причому на ребрах верхньої перфорованої пластини на динамічному приводі розміщена газодинамічна установка, яка є основною, а на нижній перфорованій пластині, що закріплена зверху на двох надувних балонах, на динамічному приводі розміщена додаткова газодинамічна установка. Конкретний приклад реалізації газодинамічного пристрою зльоту ЛА, що заявляється, пояснюється наведеними типами пристрою та траєкторії руху ЛА при зльоті. Фіг.1 - заявлений газодинамічний пристрій зльоту ЛА. Фіг.2 - приклад траєкторії руху ЛА при зльоті. Газодинамічний пристрій 1 (Фіг.1) зльоту ЛА містить пульт управління 2, злітно-посадкову перфоровану пластину 3, з'єднану з основною ГУ 4 через динамічний привід 5. На несучій перфорованій пластині 6 встановлена додаткова ГУ 7 з динамічним приводом 8, причому обидві перфоровані пластини 3 і 6 з'єднані з однієї сторони одним гідравлічним підйомником 9, а з іншої - другим гідравлічним підйомником 10 з шарніром 11 на кінці. Літальний апарат 12 перед зльотом встановлений на перфоровану пластину 3 над додатковою ГУ 7, а перфорована пластина 6 встановлена на двох надувних балонах 13. Перфорована пластина 3 необхідна для рівномірності штучного повітряного потоку і запобігання екранного ефекту, який буде заважати зльоту літального апарата 12. Крім того, перфоровані пластини 3 і 6 необхідні для нормального функціонування додаткової ГУ 7. Перфорована пластина 3 з основною ГУ 4 може бути орієнтована під необхідним для зльоту ЛА 12 кутом відносно лінії горизонту в просторі за допомогою шарніра 11, з'єднаного з гідравлічним підйомником 10, та гідравлічним підйомником 9, причому основна ГУ 4 створює штучний повітряний потік (ШПП) 14, а додаткова ГУ 7 - ШПП 15. Приклад траєкторії руху ЛА 12 при зльоті показаний на Фіг.2. Після запуску додаткової ГУ 7 під дією ШПП 15 літальний апарат 12 піднімається з положення І у положення II на висоту Нз. Потім, при одночасному включенні маршового двигуна ЛА 12 і основної ГУ 4, літальний апарат 12 переміщується з положення II у положення III, набираючи необхідну для горизонтального 1 UA 70881 U 5 10 15 20 25 30 35 польоту кінетичну енергію руху. При цьому динамічні приводи 8 і 5 дозволяють забезпечити потрібні ШПП 14 і 15. Газодинамічний пристрій 1 зльоту ЛА 12 працює наступним чином. По команді з пульта управління 2 запускається додаткова ГУ 7, що займає на перфорованій пластині 6 необхідне положення під ЛА 12 за допомогою динамічного привода 8. Одночасно починає функціонувати система стабілізації ЛА 12, яка зберігає злітне положення ЛА 12. Літальний апарат 12, що знаходиться до зльоту в нерухомому стані на перфорованій пластині 3, за рахунок дії ШПП 15 додаткової ГУ 7 піднімається з положення І у положення II на висоту Н3, причому динамічний привод 8 забезпечує необхідне положення додаткової ГУ 7 на перфорованій пластині 6 при русі ЛА 12. При досягненні висоти Нз з пульта управління 2 видається команда на одночасне включення маршового двигуна ЛА 12 і основної ГУ 4, причому основна ГУ 4 за допомогою динамічного привода 5 займає на перфорованій пластині 3 необхідне положення для забезпечення потрібної дії ШПП 14 на ЛА 12. У випадку відхилення злітної траєкторії літального апарата 12 від горизонтальної площини на певний кут по сигналу з пульта управління 2 робиться нахил перфорованої пластини 6 на той же кут за допомогою гідравлічного підйомника 9 та гідравлічного підйомника 10 з шарніром 11. Набір кінетичної енергії руху літального апарата 12 здійснюється за рахунок штучного повітряного потоку 14, причому швидкість ШПП 14 безпосередньо у основної ГУ 4 перевищує повітряну швидкість ЛА 12, а у точці на поздовжній осі, що розташована приблизно над серединою несучої платформи, дорівнює власній повітряній швидкості ЛА 12. При цьому земна швидкість ЛА 12 істотно зменшується. За рахунок малого значення земної швидкості ЛА 12 його розгін здійснюється від положення II до положення III за допомогою газодинамічного пристрою 1 зльоту ЛА 12. Ступінь синхронності підвищення тяги маршового двигуна ЛА 12 і швидкості ШПП 14 визначають поздовжній розмір несучої платформи, а також висоту розташування осі ШПП 14 над несучою платформою й поперечні розміри ЛА 12. Надувні балони 13 необхідні для забезпечення нормальної роботи ГУ 7 і транспортування газодинамічного пристрою 1 зльоту Л А 12. При наборі кінетичної енергії руху ЛА 12 має траєкторію руху за дотичною до осі ШПП 14 основної ГУ 4, причому швидкість ШПП 14 збільшується від нуля до максимальної при русі ЛА 12 в просторі над заданим районом зльоту. Штучний повітряний потік 15 від додаткової ГУ 7 створюється таким чином, що він направлений вертикально вгору і має величину швидкості (VВ) на висоти Нз. Для рівноприскореного руху (підйому) ЛА 12 типу DragonEye RQ-14 з початковою нульовою швидкістю на висоту Hз=1,5 м за час - 2 секунди з його прискоренням на всій ділянці підйому 2 VB 0,75 м/c =const необхідно забезпечити величину швидкості V B=14,46 м/с [3]. Після EA 40 досягнення заданої висоти Н3 підйом ЛА 12 припиняється, а сила ваги врівноважується за рахунок дії ШПП 15 додаткової ГУ 7. За програмну траєкторію руху ЛА 12 на етапі разгону прийнято його рух вздовж осі ШПП 14 Г в горизонтальній площині зі швидкістю VЛА . Згідно з роботою [3], для ЛА 12, типу DragonEye Г RQ-14, отримують величину прискорення на ділянці розгону VЛА 7,16 м / с 2 . Для отриманого значення V Г мінімальна необхідна величина швидкості горизонтального польоту V ШГП=45,14 ЛА 45 50 55 м/с бути досягнута за час 6,31 с. При цьому відстань необхідне для розгону ЛА 12 без урахування ШПП 14 становить 156,17 м. При ШПП 14 відстань необхідна для розгону ЛА 12 визначається тільки потужністю основної ГУ 4 і довжиною струменя ШПП 14. Джерела інформації: 1. Петров Г.Ф. Гидросамолеты и экранопланы Росии. 1910-1999 гг. - Изд-во "РУСАВИА", М., 2000. - С. 248. 2. Житников Э.Д. Устройство для взлета и посадки самолетов / Патент Российской Федерации №2316453, B64f 1/02, 10.02.2008. - с. 4. 3. Тупицин Н.Ф., Яцковский В.С. Газодинамический способ взлета летательного аппарата // Електроніка та системи управління. - 2011. - №1(27). - С. 122-127. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Газодинамічний пристрій зльоту літального апарата, що складається з несучої платформи на двох надувних балонах та газодинамічної установки, який відрізняється тим, що несуча 2 UA 70881 U 5 платформа містить дві - верхню і нижню - перфоровані пластини, які з'єднані з однієї сторони через стійку з шарніром і одним гідравлічним підйомником, а з іншої - з другим гідравлічним підйомником, причому на ребрах верхньої перфорованої пластини на динамічному приводі розміщена газодинамічна установка, яка є основною, а на нижній перфорованій пластині, що закріплена зверху на двох надувних балонах, на динамічному приводі розміщена додаткова газодинамічна установка. Комп’ютерна верстка А. Рябко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюGas-dynamic take-off device of aircraft
Автори англійськоюTupitsyn Mykola Fedorovych, Kharchenko Volodymyr Petrovych, Azarskov Valerii Mykolaiovych, Synehlazov Viktor Mykhailovych, Varchenko Oleh Ivanovych, Matiichyk Mykhailo Petrovych
Назва патенту російськоюГазодинамическое устройство взлета летательного аппарата
Автори російськоюТупицын Николай Федорович, Харченко Владимир Петрович, Азарсков Валерий Николаевич, Синеглазов Виктор Михайлович, Варченко Олег Иванович, Матийчик Михаил Петрович
МПК / Мітки
МПК: B64F 1/00
Мітки: зльоту, газодинамічний, літального, пристрій, апарата
Код посилання
<a href="https://ua.patents.su/5-70881-gazodinamichnijj-pristrijj-zlotu-litalnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Газодинамічний пристрій зльоту літального апарата</a>
Газодинамічний пристрій посадки літального апарата
Номер патенту: 95032
Опубліковано: 25.06.2011
Автори: Тупіцин Микола Федорович, Тупіцина Наталія Миколаївна
МПК: B64F 1/00
Мітки: літального, пристрій, посадки, газодинамічний, апарата
Формула / Реферат:
Газодинамічний пристрій посадки літального апарата, що складається з несучої платформи на двох надувних балонах та газодинамічної установки, який відрізняється тим, що несуча платформа містить дві - верхню і нижню - перфоровані пластини, які з'єднані з однієї сторони через стійку з одним шарніром і гідравлічним підйомником, а з іншої - з другим гідравлічним підйомником, причому на ребрах верхньої перфорованої пластини, зв'язаної з...
Механізм вертикального зльоту та приземлення безкільового літального апарата
Номер патенту: 16051
Опубліковано: 17.07.2006
Автор: Цюренко Валентин Андрійович
МПК: B64C 39/02, B64C 29/00
Мітки: літального, апарата, безкільового, механізм, вертикального, зльоту, приземлення
Формула / Реферат:
Механізм вертикального зльоту і приземлення безкільового апарата, який характеризується тим, що містить рухому фланцеву платформу, яка з’єднана з робочим комплексом безкільового літального апарата чотирма штоками, які мають шарнірне з’єднання з платформою, а з робочим комплексом, через циліндри, з гідравлічним приводом, штоки розміщені на площині через 90°, а через кожні 45° від кожного штока розміщені по одному гвинту під кутом нахилу 45° до...
Пристрій посадки літального апарата
Номер патенту: 52596
Опубліковано: 25.08.2010
Автори: Тупіцина Наталія Миколаївна, Тупіцин Микола Федорович
МПК: B64F 1/00, B64C 25/00
Мітки: пристрій, літального, посадки, апарата
Формула / Реферат:
Пристрій посадки літального апарата, що складається з несучої платформи на двох надувних балонах та газодинамічної установки, який відрізняється тим, що несуча платформа містить дві - верхню і нижню - перфоровані пластини, які з'єднані з однієї сторони через стійку з одним шарніром і гідравлічним підйомником, а з іншої - з другим гідравлічним підйомником, причому на ребрах верхньої перфорованої пластини, зв'язаної з газодинамічною...
Пристрій для посадки літального апарата
Номер патенту: 34342
Опубліковано: 11.08.2008
Автори: Слєпов Лев Іванович, Якобінчук Олександр Вікторович, Гладков Віктор Михайлович, Блаженний Валерій Іванович, Куровська Тетяна Юріївна
МПК: B64F 1/00
Мітки: посадки, пристрій, апарата, літального
Формула / Реферат:
1. Пристрій для посадки літального апарата, який містить посадкову смугу, гальмівний пристрій, який відрізняється тим, що додатково містить транспортну платформу, що містить двигун, пристрій вимірювання координат і швидкості літального апарата, пристрій керування, приймач, при цьому посадкова смуга виконана як пристрій фіксації літального апарата, причому гальмівний пристрій розташовано на транспортній платформі.2. Пристрій для посадки...
Пристрій для збільшення підйомної сили літального апарата
Номер патенту: 28799
Опубліковано: 25.12.2007
Автори: Лук'янчук Микола Романович, Черепащук Альберт Васильович
МПК: B64C 27/00
Мітки: сили, апарата, збільшення, підйомної, пристрій, літального
Формула / Реферат:
Пристрій для збільшення підйомної сили літального апарата, що містить у собі фюзеляж, силову установку, несучий гвинт та вал приводу, який відрізняється тим, що на фюзеляжі, безпосередньо під несучим гвинтом, встановлюється конус з діаметром, рівним діаметру кола, описуваного лопатями гвинта під час його обертання.
Попередній патент: Генератор для отримання енергії високих напруг
Наступний патент: Спосіб підвищення безпеки виконання посадки літального апарата в умовах невизначеності
Випадковий патент: Спосіб визначення морфології пластидного апарату рослин