Спосіб підвищення безпеки виконання посадки літального апарата в умовах невизначеності
Номер патенту: 70882
Опубліковано: 25.06.2012
Автори: Кравчук Микола Петрович, Шевчук Дмитро Олегович, Новачук Лілія Віталіївна, Яковицька Олена Юріївна, Казак Василь Миколайович, Мрачковська Еліна Олександрівна

Формула / Реферат
1. Спосіб підвищення безпеки виконання посадки літального апарата в умовах невизначеності, який полягає у тому, що теоретично визначають місце повної зупинки літального апарата (ЛА) на злітно-посадковій смузі (ЗПС), який відрізняється тим, що здійснюють безперервне прогнозування точки майбутнього торкання шасі ЛА злітно-посадкової смуги для поточної польотної ситуації, що склалася у повітрі.
2. Спосіб за п. 1, який відрізняється тим, що проводять оптимізацію вибору дій екіпажу у процесі зниження ЛА по глісаді до висоти прийняття рішення з використанням підказки відносно прогнозованої точки торкання шасі ЗПС у разі порушення границі цілісності, тобто за умови, коли один з параметрів еліпсоїда відхилень вийшов за межі контуру внутрішнього "тунелю" та визначають з множини потенціальних підказок щодо дій екіпажу в цій конкретній ситуації, яка є оптимальною за часом й забезпечує найефективніше повернення ЛА на необхідну траєкторію зниження в умовах обмеженого часу для виконання безпечної посадки.
Текст
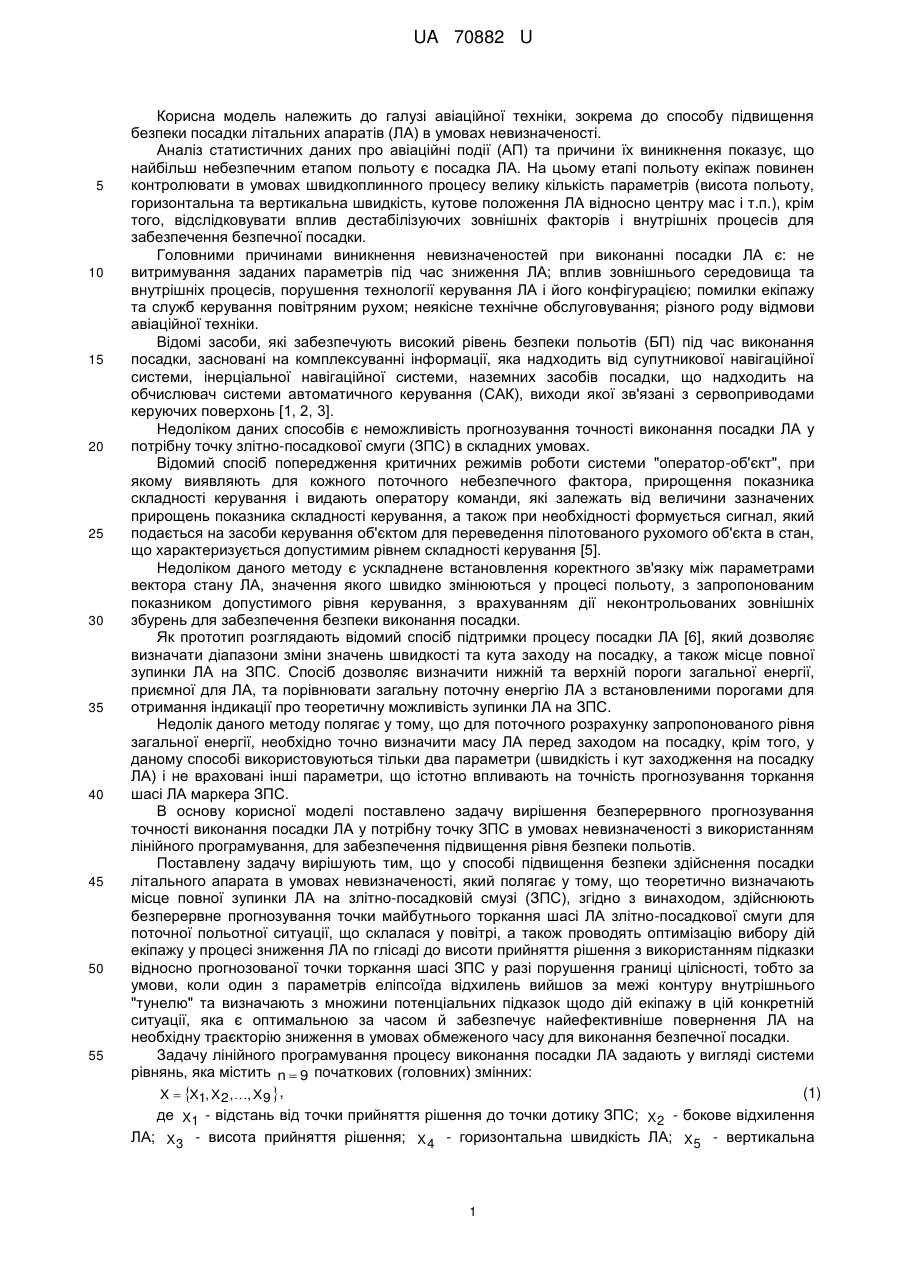
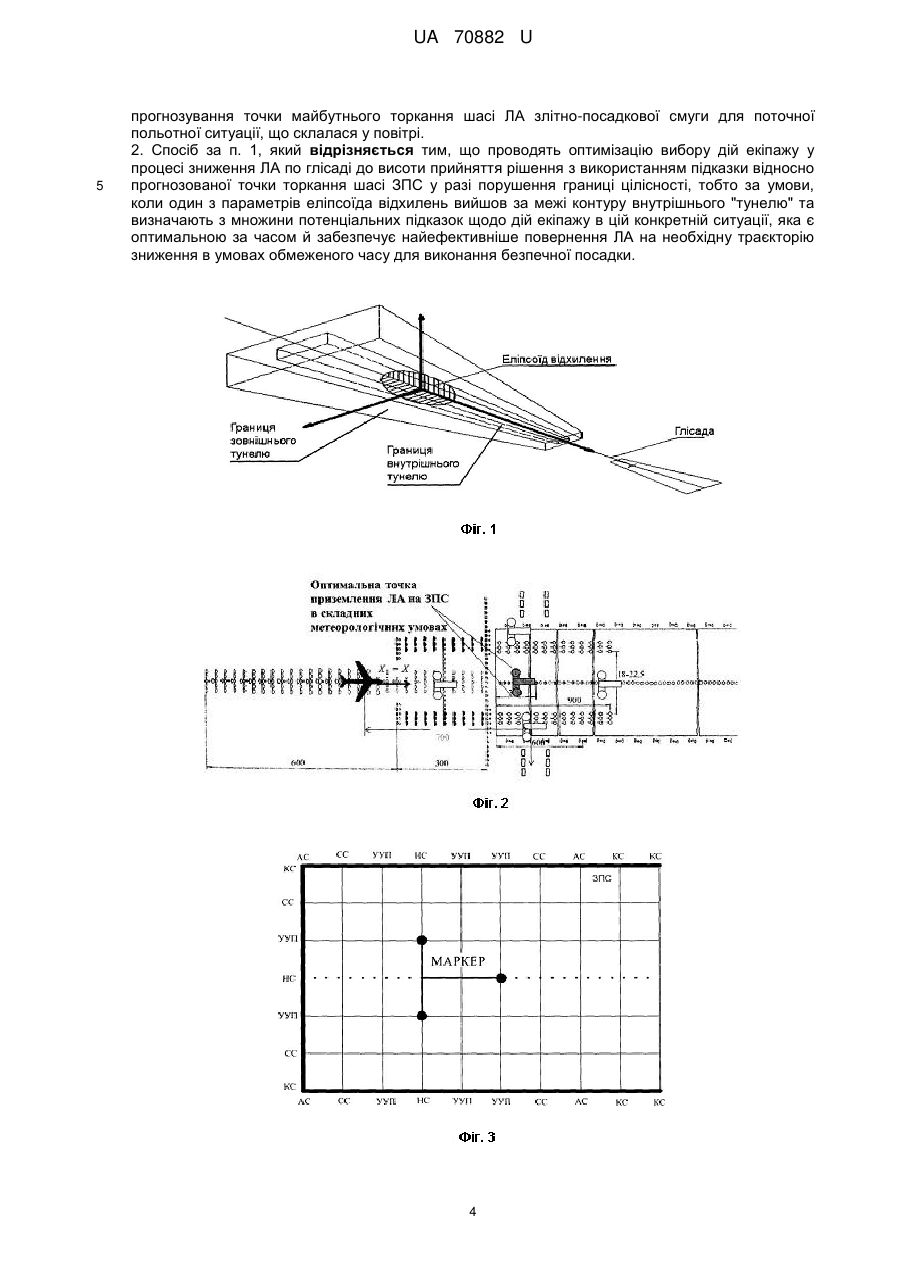
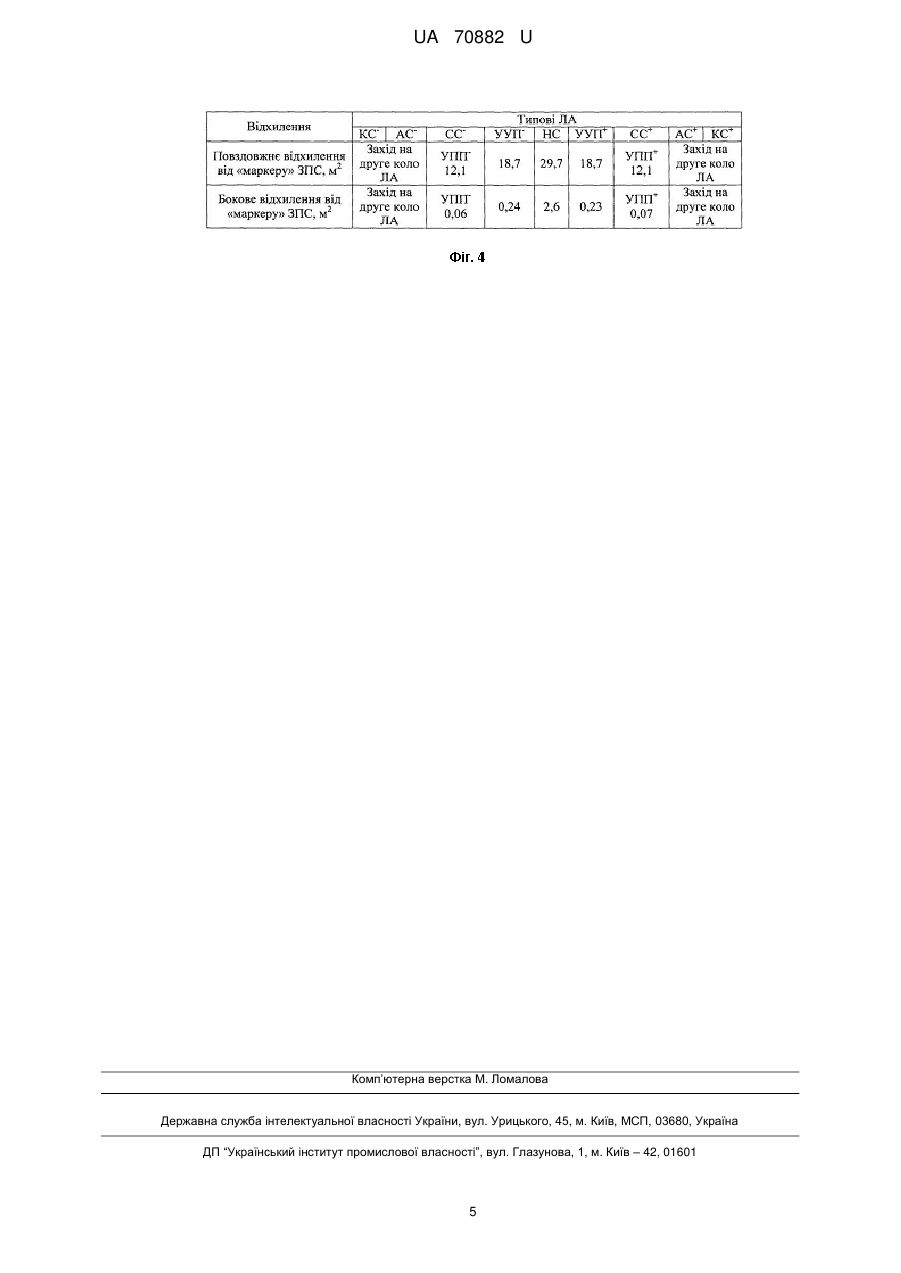
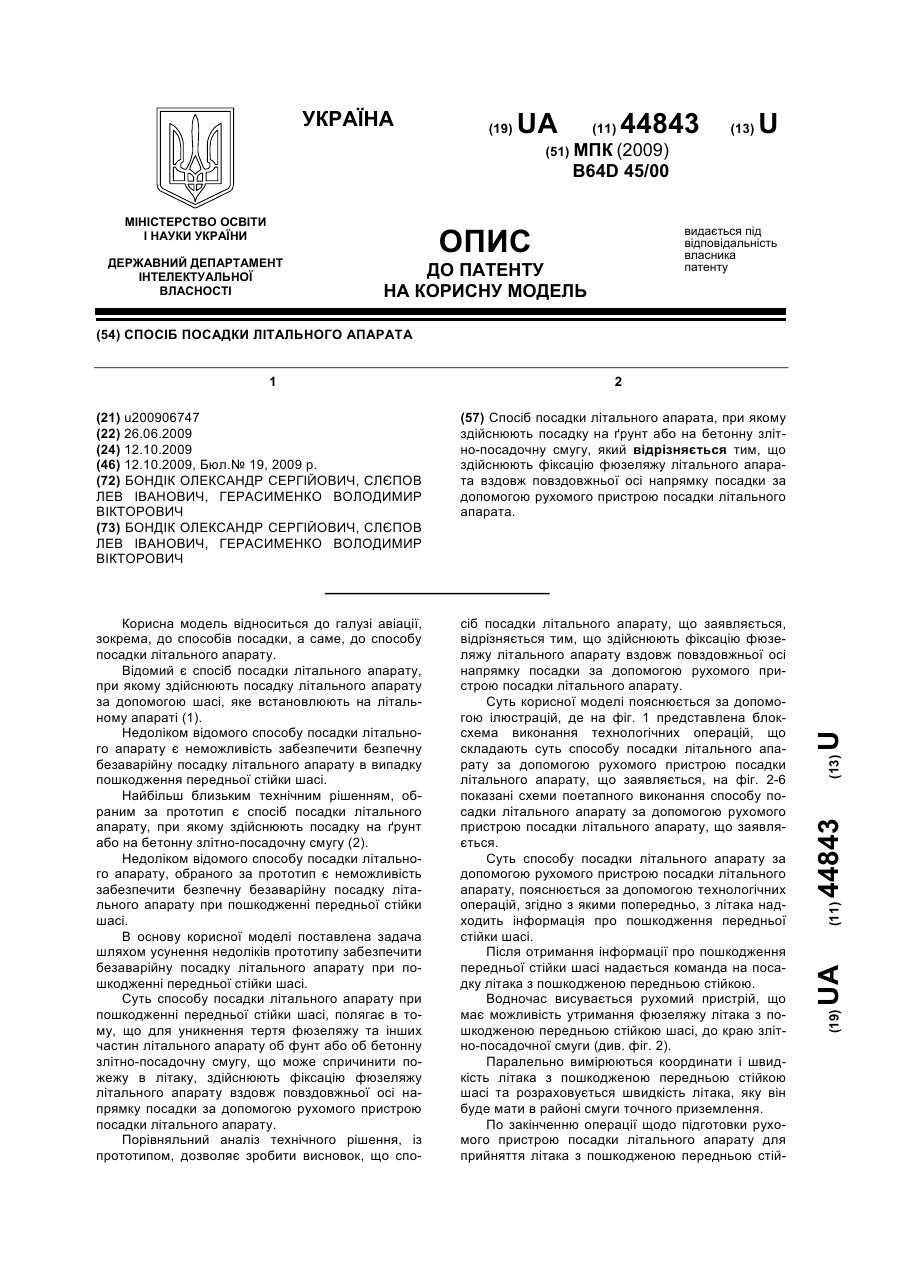
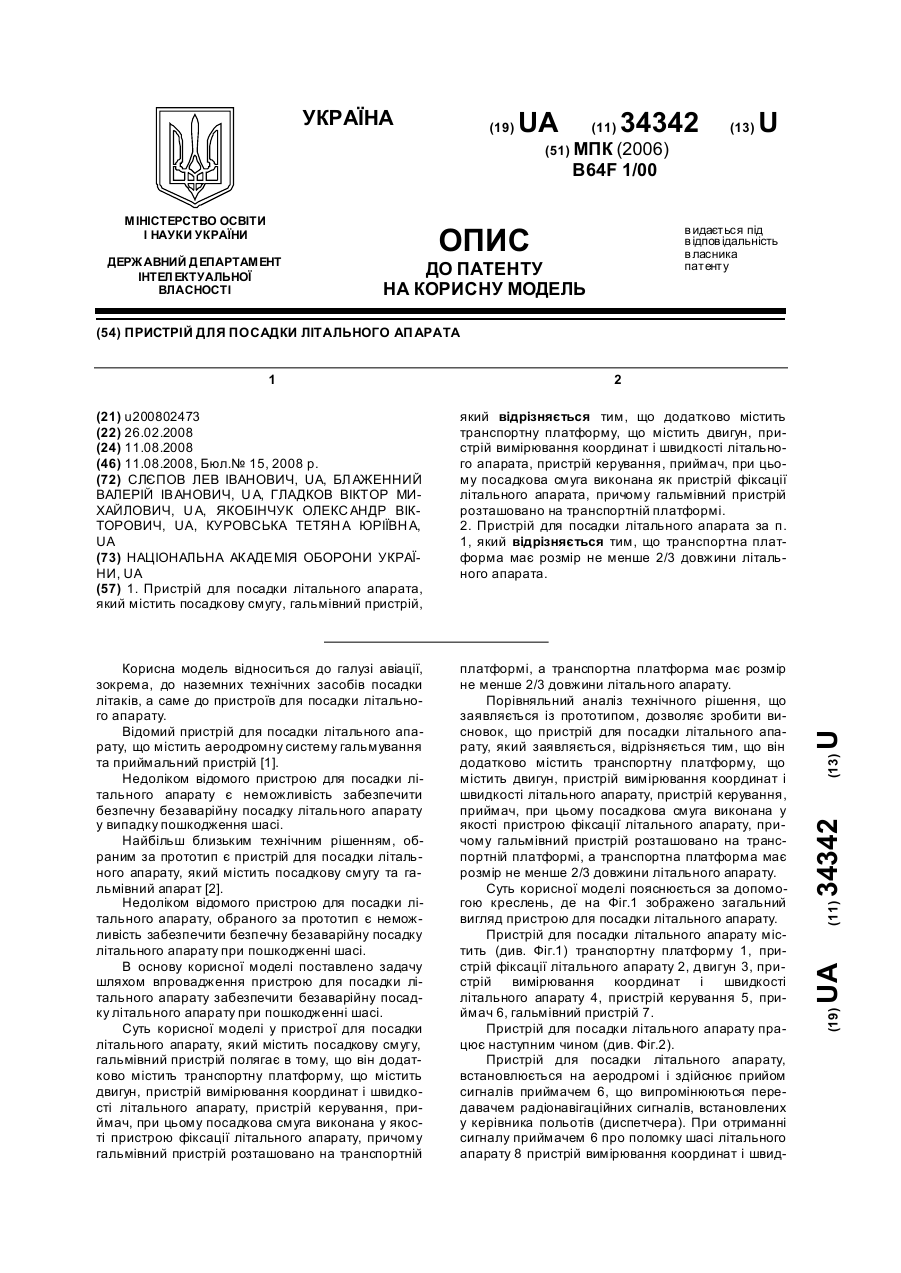
Реферат: Спосіб підвищення безпеки виконання посадки літального апарата в умовах невизначеності полягає у тому, що теоретично визначають місце повної зупинки літального апарата (ЛА) на злітно-посадковій смузі (ЗПС). Здійснюють безперервне прогнозування точки майбутнього торкання шасі ЛА злітно-посадкової смуги для поточної польотної ситуації, що склалася у повітрі. UA 70882 U (54) СПОСІБ ПІДВИЩЕННЯ БЕЗПЕКИ ВИКОНАННЯ ПОСАДКИ ЛІТАЛЬНОГО АПАРАТА В УМОВАХ НЕВИЗНАЧЕНОСТІ UA 70882 U UA 70882 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до галузі авіаційної техніки, зокрема до способу підвищення безпеки посадки літальних апаратів (ЛА) в умовах невизначеності. Аналіз статистичних даних про авіаційні події (АП) та причини їх виникнення показує, що найбільш небезпечним етапом польоту є посадка ЛА. На цьому етапі польоту екіпаж повинен контролювати в умовах швидкоплинного процесу велику кількість параметрів (висота польоту, горизонтальна та вертикальна швидкість, кутове положення ЛА відносно центру мас і т.п.), крім того, відслідковувати вплив дестабілізуючих зовнішніх факторів і внутрішніх процесів для забезпечення безпечної посадки. Головними причинами виникнення невизначеностей при виконанні посадки ЛА є: не витримування заданих параметрів під час зниження ЛА; вплив зовнішнього середовища та внутрішніх процесів, порушення технології керування ЛА і його конфігурацією; помилки екіпажу та служб керування повітряним рухом; неякісне технічне обслуговування; різного роду відмови авіаційної техніки. Відомі засоби, які забезпечують високий рівень безпеки польотів (БП) під час виконання посадки, засновані на комплексуванні інформації, яка надходить від супутникової навігаційної системи, інерціальної навігаційної системи, наземних засобів посадки, що надходить на обчислювач системи автоматичного керування (САК), виходи якої зв'язані з сервоприводами керуючих поверхонь [1, 2, 3]. Недоліком даних способів є неможливість прогнозування точності виконання посадки ЛА у потрібну точку злітно-посадкової смуги (ЗПС) в складних умовах. Відомий спосіб попередження критичних режимів роботи системи "оператор-об'єкт", при якому виявляють для кожного поточного небезпечного фактора, прирощення показника складності керування і видають оператору команди, які залежать від величини зазначених прирощень показника складності керування, а також при необхідності формується сигнал, який подається на засоби керування об'єктом для переведення пілотованого рухомого об'єкта в стан, що характеризується допустимим рівнем складності керування [5]. Недоліком даного методу є ускладнене встановлення коректного зв'язку між параметрами вектора стану ЛА, значення якого швидко змінюються у процесі польоту, з запропонованим показником допустимого рівня керування, з врахуванням дії неконтрольованих зовнішніх збурень для забезпечення безпеки виконання посадки. Як прототип розглядають відомий спосіб підтримки процесу посадки ЛА [6], який дозволяє визначати діапазони зміни значень швидкості та кута заходу на посадку, а також місце повної зупинки ЛА на ЗПС. Спосіб дозволяє визначити нижній та верхній пороги загальної енергії, приємної для ЛА, та порівнювати загальну поточну енергію ЛА з встановленими порогами для отримання індикації про теоретичну можливість зупинки ЛА на ЗПС. Недолік даного методу полягає у тому, що для поточного розрахунку запропонованого рівня загальної енергії, необхідно точно визначити масу ЛА перед заходом на посадку, крім того, у даному способі використовуються тільки два параметри (швидкість і кут заходження на посадку ЛА) і не враховані інші параметри, що істотно впливають на точність прогнозування торкання шасі ЛА маркера ЗПС. В основу корисної моделі поставлено задачу вирішення безперервного прогнозування точності виконання посадки ЛА у потрібну точку ЗПС в умовах невизначеності з використанням лінійного програмування, для забезпечення підвищення рівня безпеки польотів. Поставлену задачу вирішують тим, що у способі підвищення безпеки здійснення посадки літального апарата в умовах невизначеності, який полягає у тому, що теоретично визначають місце повної зупинки ЛА на злітно-посадковій смузі (ЗПС), згідно з винаходом, здійснюють безперервне прогнозування точки майбутнього торкання шасі ЛА злітно-посадкової смуги для поточної польотної ситуації, що склалася у повітрі, а також проводять оптимізацію вибору дій екіпажу у процесі зниження ЛА по глісаді до висоти прийняття рішення з використанням підказки відносно прогнозованої точки торкання шасі ЗПС у разі порушення границі цілісності, тобто за умови, коли один з параметрів еліпсоїда відхилень вийшов за межі контуру внутрішнього "тунелю" та визначають з множини потенціальних підказок щодо дій екіпажу в цій конкретній ситуації, яка є оптимальною за часом й забезпечує найефективніше повернення ЛА на необхідну траєкторію зниження в умовах обмеженого часу для виконання безпечної посадки. Задачу лінійного програмування процесу виконання посадки ЛА задають у вигляді системи рівнянь, яка містить n 9 початкових (головних) змінних: (1) X X1, X2 ,, X9 , де X1 - відстань від точки прийняття рішення до точки дотику ЗПС; X 2 - бокове відхилення ЛА; X 3 - висота прийняття рішення; X 4 - горизонтальна швидкість ЛА; X 5 - вертикальна 1 UA 70882 U 5 швидкість ЛА; X 6 - кут крену ЛА; X 7 - кут тангажа ЛА; X 8 - імовірність того, що на відстані X1 екіпаж бачить не менше трьох вогнів аеродромного світлосигнального комплексу посадки; X 9 кут нишпорення ЛА відносно середньої лінії (поздовжнього маркера) ЗПС; та чотирьох обмежень (три обмеження типу і одне типу ). Системи обмежень множини (1) для типового ЛА такі: - обмеження у заданих умовах: 0, якщо P 3 n 8 ; L 0, якщо VГ n 4 ; 0, якщо Z 0; 0,5, якщо n P 3 n ; 9 10 0,5, якщо 0 Z n1; 0,5, якщо n 4 VГ n 5 ; L X2 X4 X8 3 n ; 1 якщо n1 Z n 2 ; , 1 якщо n 5 VГ n 6 ; , , 1 якщо n11 PL 9 2, якщо Z n 3 ; 1 якщо VГ n 7 ; , , 1 якщо P 3 n11; L де: n n1,, n11 - границі діапазонів зміни параметрів; - обмеження типу : a11X1 a12 X 2 a13 X 3 a14 X 4 a15 X 5 a16 X 6 a17 X 7 a18 X 8 a19 X 9 b1 a 21X1 a 22 X 2 a 23 X 3 a 24 X 4 a 25 X 5 a 26 X 6 a 27 X 7 a 28 X 8 a 29 X 9 b 2 a 31X1 a 32 X 2 a 33 X 3 a 34 X 4 a 35 X 5 a 36 X 6 a 37 X 7 a 38 X 8 a 39 X 9 b 3 10 (2) - обмеження типу : a 41X1 a 42 X 2 a 43 X 3 a 44 X 4 a 45 X 5 a 46 X 6 , a 47 X 7 a 48 X 8 a 49 X 9 b 4 b1, b 2 , b 3 , b 4 0. де: a ij - коефіцієнти оптимального приземлення ЛА у задану точку ЗПС, b k - базисні змінні 15 приземлення ЛА. Як параметр місця положення ЛА на етапі посадки, для визначення цілісності координат вибирають кругове положення RK (Фіг. 1, еліпсоїд): RK s2 h2 z 2 , де s, h, z - поздовжній нахил, вертикальне та бічне відхилення ЛА, відповідно. Кругова швидкість зростання поздовжнього нахилу, вертикального та бічного відхилення ЛА: 20 RK s2 h2 z 2 , де s, h, z - відповідно швидкості зміни поздовжнього, вертикального та бічного відхилень. 25 Суть задачі оптимізації вибору алгоритма дій екіпажу у процесі зниження ЛА вздовж глісади до висоти прийняття рішення з використанням підказки відносно прогнозованої точки торкання шасі ЗПС, полягає у тому, щоб при порушенні границі цілісності, тобто за умови, що хоча б один з параметрів еліпсоїда вийшов за межі контуру внутрішнього "тунелю" [7], знайти з множини потенціальних підказок A i , i 1, n , щодо дій екіпажу в цій конкретній ситуації, оптимальну для даного інтервалу Ti часу A опт t , яка забезпечує найефективніше повернення ЛА на необхідну траєкторію зниження при обмеженому часі польоту t пол , який не перевищує критичний час t крит : m A опт t minTi min gijp ij , j 1 30 i 1 n, j 1 m , , , де g ij - величина потенційного збільшення параметрів еліпсоїда відхилення ЛА від заданої траєкторії; p ij - ймовірність виникнення j-го порушення границі цілісності в результаті 35 збільшення і-го параметра еліпсоїда. Розглядають спосіб прогнозування точності виконання посадки у потрібну точку ЗПС на прикладі середньомагістрального типового ЛА. Задають значення діапазонів чотирьох обмежень: 2 UA 70882 U 0, якщо P 3 0.9; L 0, якщо VГ 270 км / год; 0, якщо Z 0; 0,5, якщо 0,85 P 3 0.9; 0,5, якщо 0 Z 15; 0,5, якщо 270 VГ 290; L X2 X4 X8 3 , , , 1 якщо 15 Z 30; 1 якщо 290 VГ 360; 1 якщо 0,8 PL 0.85; 2, якщо 30 Z 60; 1 якщо VГ 400; , , 1 якщо P 3 0.8; L Представляють розрахункові значення кожного a ij виразу (2) у наступному вигляді: 2 1 3 12 0 5 A 0 11 8 1 5 5 5 10 2 4 1 3 2 4 1 5 1 8 7 15 20 0 4 8 1 7 5 5 8 8 0 0 8 4 0 3 0 1 0 0 1 0 0 0 1 0 0 1 0 0 0 1 0 0 1 0 0 0 0 0 (3) Схема розташування вогнів за Альпа-Атою і отримані в результаті математичного моделювання оптимальної точки торкання ЛА ЗПС в складних метеорологічних умовах (СМУ) приведено на Фіг. 2. Значення параметрів при проведенні машинного експерименту: Х(1) = 0.00; Х(2) = 0.50; Х(3) = 0.00; Х(4) = 0.24; Х(5) = 1.27; Х(6) = 0.00; Х(7) = 0.00; Х(8) = 1.08; Х(9) = 0.00 є оптимальним розв'язанням однієї з польотних ситуацій на етапі посадки в умовах невизначеності. Математичне сподівання та середньоквадратичне відхилення визначених параметрів для кожної типової ситуації (НС, УУП, СС, АС, КС) вираховують за формулами Фіг. 3. bn bn 2 xf x dx x mn f x dx a a , mn n ; n bn bn f x dx f x dx an an 15 20 25 30 35 де f x - щільність ймовірностей відхилення ЛА від потрібної точки торкання "маркера" ЗПС, і b n - бокові і повздовжні межі n-го типу на етапі виконання посадки ЛА. an Результати розрахунку математичних сподівань і середньоквадратичних відхилень від НС під час виконання посадки приведено на Фіг. 4, де: - нормальна ситуація (НС); - ускладнення умов польоту (УУП); - складна ситуація (СС); - аварійна ситуація (АС); - катастрофічна ситуація (КС). Джерела інформації: 1. Патент Російської Федерації RU 2341774, МПК B64D45/04. Комплексная система посадки летательных аппаратов и способ захода на посадку / Т. Б. Гальперен, Б. А. Лапин, Р. Н. Сулейманов; Опубл. 27.05.2008. 2. Патент Російської Федерації RU 2284058, МПК G08G5/02, B64D45/04. Система автоматической посадки летательных аппаратов / В.В. Кабачинский, Ю.И. Калинин, М.И. Минеев; Опубл. 20.04.2006. 3. US 2011106345. Low visibility landing system and method / Takacs Robert, Freeman Gary; Publication date: 2011-05-12 Classification international: B64D45/04. 4. Патент Російської Федерації RU 2228885, МПК B64D45/00, G08B23/00, G05D1/08. Система защиты самолета от ошибочных или умышленных действий, приводящих к катастрофе / Л.М. Берестов, Е.Г. Харин, А.А. Кондратов, Л.Я. Мирошниченко, Ю.И.Калинин; Опубл. 20.07.2003. 5. Патент Російської Федерації RU 2114456, МПК G05B13/00, G05D1/00. Способ и устройство предупреждения критических режимов системы оператор - объект / И.И. Лернер, А.Б. Петров; Опубл. 27.06.1998. 6. Патент Російської Федерації RU 2389659, B64D45/00. Способ и устройство поддержки посадки для летательного аппарата / К. Флориан (FR); Опубл. 12.01.2009. 7. Руководство по требуемым навигационным характеристикам, DOC 9613-AN 1937, ICAO, 1999. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 40 1. Спосіб підвищення безпеки виконання посадки літального апарата в умовах невизначеності, який полягає у тому, що теоретично визначають місце повної зупинки літального апарата (ЛА) на злітно-посадковій смузі (ЗПС), який відрізняється тим, що здійснюють безперервне 3 UA 70882 U 5 прогнозування точки майбутнього торкання шасі ЛА злітно-посадкової смуги для поточної польотної ситуації, що склалася у повітрі. 2. Спосіб за п. 1, який відрізняється тим, що проводять оптимізацію вибору дій екіпажу у процесі зниження ЛА по глісаді до висоти прийняття рішення з використанням підказки відносно прогнозованої точки торкання шасі ЗПС у разі порушення границі цілісності, тобто за умови, коли один з параметрів еліпсоїда відхилень вийшов за межі контуру внутрішнього "тунелю" та визначають з множини потенціальних підказок щодо дій екіпажу в цій конкретній ситуації, яка є оптимальною за часом й забезпечує найефективніше повернення ЛА на необхідну траєкторію зниження в умовах обмеженого часу для виконання безпечної посадки. 4 UA 70882 U Комп’ютерна верстка М. Ломалова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of improving safety of landing aircraft under conditions of uncertainty
Автори англійськоюKazak Vasyl Mykolaiovych, Kravchuk Mykola Petrovych, Shevchuk Dmytro Olehovych, Mrachkovska Elina Oleksandrivna, Yakovytska Olena Yuriivna, Novachuk Lilia Vitaliivna
Назва патенту російськоюСпособ повышения безопасности выполнения посадки летательного аппарата в условиях неопределенности
Автори російськоюКазак Василий Николаевич, Кравчук Николай Петрович, Шевчук Дмитрий Олегович, Мрачковская Элина Александровна, Яковицкая Елена Юрьевна, Новачук Лилия Витальевна
МПК / Мітки
МПК: B64D 45/00
Мітки: апарата, безпеки, умовах, посадки, невизначеності, виконання, підвищення, літального, спосіб
Код посилання
<a href="https://ua.patents.su/7-70882-sposib-pidvishhennya-bezpeki-vikonannya-posadki-litalnogo-aparata-v-umovakh-neviznachenosti.html" target="_blank" rel="follow" title="База патентів України">Спосіб підвищення безпеки виконання посадки літального апарата в умовах невизначеності</a>
Спосіб посадки літального апарата
Номер патенту: 44843
Опубліковано: 12.10.2009
Автори: Бондік Олександр Сергійович, Слєпов Лев Іванович, Герасименко Володимир Вікторович
МПК: B64D 45/00
Мітки: апарата, спосіб, посадки, літального
Формула / Реферат:
Спосіб посадки літального апарата, при якому здійснюють посадку на ґрунт або на бетонну злітно-посадочну смугу, який відрізняється тим, що здійснюють фіксацію фюзеляжу літального апарата вздовж повздовжньої осі напрямку посадки за допомогою рухомого пристрою посадки літального апарата.
Пристрій для посадки літального апарата
Номер патенту: 34342
Опубліковано: 11.08.2008
Автори: Гладков Віктор Михайлович, Якобінчук Олександр Вікторович, Слєпов Лев Іванович, Блаженний Валерій Іванович, Куровська Тетяна Юріївна
МПК: B64F 1/00
Мітки: літального, посадки, пристрій, апарата
Формула / Реферат:
1. Пристрій для посадки літального апарата, який містить посадкову смугу, гальмівний пристрій, який відрізняється тим, що додатково містить транспортну платформу, що містить двигун, пристрій вимірювання координат і швидкості літального апарата, пристрій керування, приймач, при цьому посадкова смуга виконана як пристрій фіксації літального апарата, причому гальмівний пристрій розташовано на транспортній платформі.2. Пристрій для посадки...
Спосіб посадки літального апарата
Номер патенту: 52597
Опубліковано: 25.08.2010
Автори: Тупіцин Микола Федорович, Тупіцина Наталія Миколаївна
МПК: B64C 25/00, B64F 1/00
Мітки: посадки, апарата, спосіб, літального
Формула / Реферат:
Спосіб посадки літального апарата, за яким вимикають двигуни літального апарата та гальмують його у заданому районі посадки, який відрізняється тим, що гальмування здійснюють створеним штучним повітряним потоком від газодинамічної установки, яка є основною, літальний апарат направляють за дотичною до вісі цього штучного повітряного потоку, швидкість якого зменшують до нуля при вході центра мас літального апарата в простір над заданим районом...
Спосіб вимушеної посадки літального апарата на воду

Номер патенту: 15604
Опубліковано: 30.06.1997
Автори: Бєлявскій Алєксандр Ніколаєвіч, Іванов Віктор Михайлович, Гонцова Ларіса Гєннадієвна
МПК: B64C 25/00
Мітки: літального, посадки, апарата, спосіб, вимушеної, воду
Формула / Реферат:
Способ вынужденной посадки летательного аппарата на воду, снабженного трехопорным неубирающимся лыжным шасси с носовой опорой, включающий снижение, выравнивание, выдерживание и пробег по воде, отличающийся тем, что на этапе снижения, путем постановки на упор, исключают поворот лыж при пробеге по воде основных опор в сторону отклонения на положительные углы, а носовой опоры - в сторону отклонения на отрицательные углы относительно исходных...
Пристрій для посадки безпілотного літального апарата
Номер патенту: 53306
Опубліковано: 11.10.2010
Автори: Тупіцин Микола Федорович, Синєглазов Віктор Михайлович, Удовенко Олександр Опанасович
МПК: B64C 25/00, B64F 1/00
Мітки: пристрій, безпілотного, літального, посадки, апарата
Формула / Реферат:
1. Пристрій для посадки безпілотного літального апарата, що містить гальмівний крюк, який своїм вільним кінцем з крюком виконує захват пружного троса перших гальмівних воріт, який відрізняється тим, що висота розміщення троса перших воріт Н1 більше, ніж висота розміщення троса других воріт Н2, на величину, так, що
Попередній патент: Газодинамічний пристрій зльоту літального апарата
Наступний патент: Спосіб визначення температури контактної взаємодії поверхонь вузла тертя
Випадковий патент: Нейрон "троянда4"