Спосіб автоматичного керування процесом дистиляції спирту в бражній колоні
Номер патенту: 72470
Опубліковано: 27.08.2012
Автори: Левінський Валерій Михайлович, Стрига Андрій Анатолійович


Формула / Реферат
Спосіб автоматичного управління процесом дистиляції спирту в бражній колоні, що включає регулювання тиску верху колони, тиску низу колони та концентрації спирту на виході, який відрізняється тим, що для компенсації впливу тиску низа колони на тиск верха колони вводять корегуючий зв'язок, який реалізують передатною функцією:
![]()
де: ![]() - передатна функція ОУ за каналом "u2-Рв";
- передатна функція ОУ за каналом "u2-Рв";
![]() - передатна функція ОУ за каналом "u2-Рн";
- передатна функція ОУ за каналом "u2-Рн";
![]() - передатна функція регулятора 7.
- передатна функція регулятора 7.
Текст
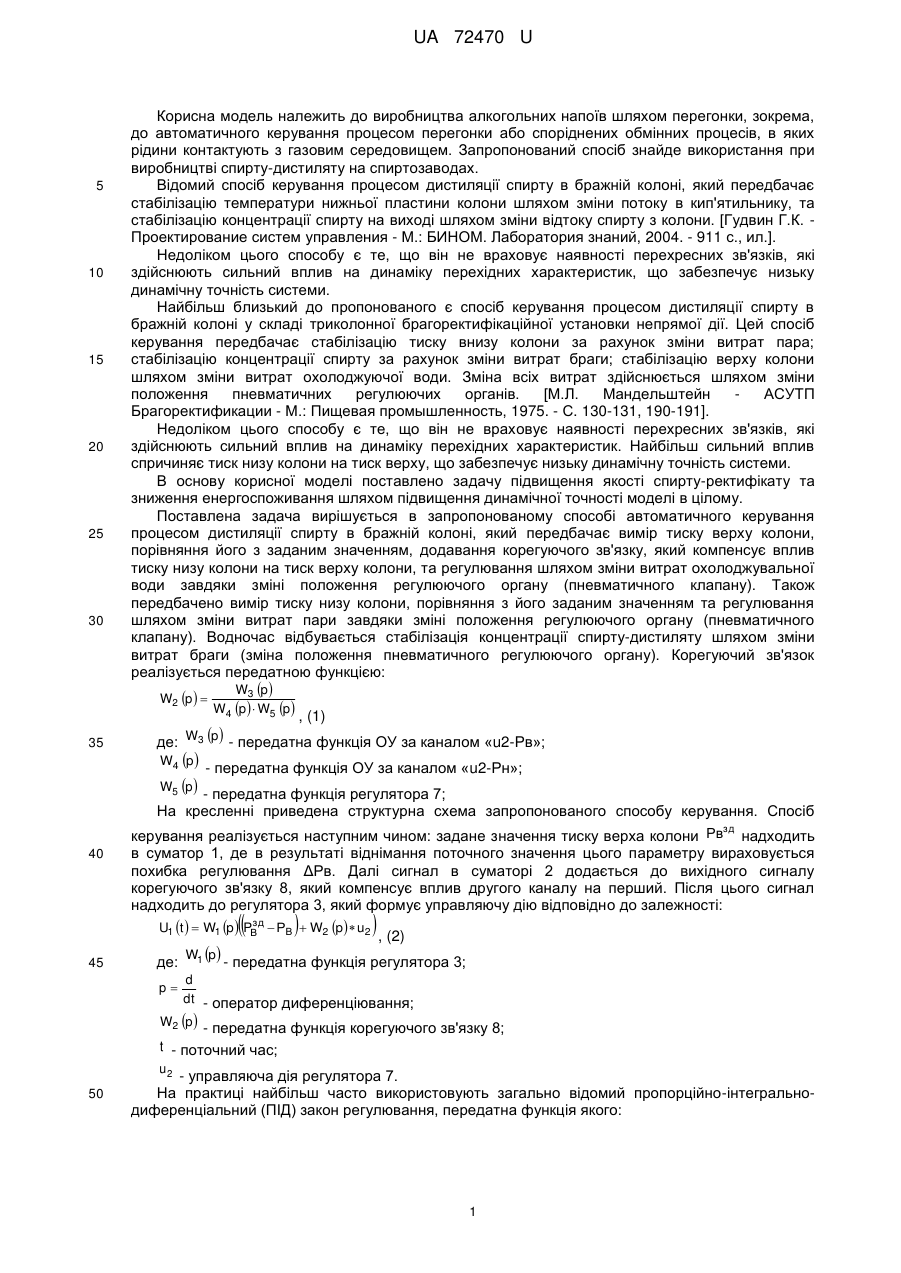
Реферат: UA 72470 U UA 72470 U 5 10 15 20 25 30 Корисна модель належить до виробництва алкогольних напоїв шляхом перегонки, зокрема, до автоматичного керування процесом перегонки або споріднених обмінних процесів, в яких рідини контактують з газовим середовищем. Запропонований спосіб знайде використання при виробництві спирту-дистиляту на спиртозаводах. Відомий спосіб керування процесом дистиляції спирту в бражній колоні, який передбачає стабілізацію температури нижньої пластини колони шляхом зміни потоку в кип'ятильнику, та стабілізацію концентрації спирту на виході шляхом зміни відтоку спирту з колони. [Гудвин Г.К. Проектирование систем управления - Μ.: БИНОМ. Лаборатория знаний, 2004. - 911 с., ил.]. Недоліком цього способу є те, що він не враховує наявності перехресних зв'язків, які здійснюють сильний вплив на динаміку перехідних характеристик, що забезпечує низьку динамічну точність системи. Найбільш близький до пропонованого є спосіб керування процесом дистиляції спирту в бражній колоні у складі триколонної брагоректифікаційної установки непрямої дії. Цей спосіб керування передбачає стабілізацію тиску внизу колони за рахунок зміни витрат пара; стабілізацію концентрації спирту за рахунок зміни витрат браги; стабілізацію верху колони шляхом зміни витрат охолоджуючої води. Зміна всіх витрат здійснюється шляхом зміни положення пневматичних регулюючих органів. [М.Л. Мандельштейн АСУТП Брагоректификации - М.: Пищевая промышленность, 1975. - С. 130-131, 190-191]. Недоліком цього способу є те, що він не враховує наявності перехресних зв'язків, які здійснюють сильний вплив на динаміку перехідних характеристик. Найбільш сильний вплив спричиняє тиск низу колони на тиск верху, що забезпечує низьку динамічну точність системи. В основу корисної моделі поставлено задачу підвищення якості спирту-ректифікату та зниження енергоспоживання шляхом підвищення динамічної точності моделі в цілому. Поставлена задача вирішується в запропонованому способі автоматичного керування процесом дистиляції спирту в бражній колоні, який передбачає вимір тиску верху колони, порівняння його з заданим значенням, додавання корегуючого зв'язку, який компенсує вплив тиску низу колони на тиск верху колони, та регулювання шляхом зміни витрат охолоджувальної води завдяки зміні положення регулюючого органу (пневматичного клапану). Також передбачено вимір тиску низу колони, порівняння з його заданим значенням та регулювання шляхом зміни витрат пари завдяки зміні положення регулюючого органу (пневматичного клапану). Водночас відбувається стабілізація концентрації спирту-дистиляту шляхом зміни витрат браги (зміна положення пневматичного регулюючого органу). Корегуючий зв'язок реалізується передатною функцією: W2 p 35 де: W3 p W4 p W5 p W3 p W4 p W5 p , (1) - передатна функція ОУ за каналом «u2-Рв»; - передатна функція ОУ за каналом «u2-Рн»; - передатна функція регулятора 7; На кресленні приведена структурна схема запропонованого способу керування. Спосіб зд 40 керування реалізується наступним чином: задане значення тиску верха колони Рв надходить в суматор 1, де в результаті віднімання поточного значення цього параметру вираховується похибка регулювання ΔРв. Далі сигнал в суматорі 2 додається до вихідного сигналу корегуючого зв'язку 8, який компенсує вплив другого каналу на перший. Після цього сигнал надходить до регулятора 3, який формує управляючу дію відповідно до залежності: зд U1 t W1 p PВ РВ W2 p u2 45 де: W1 p , (2) - передатна функція регулятора 3; d p dt - оператор диференціювання; W2 p - передатна функція корегуючого зв'язку 8; t - поточний час; u2 50 - управляюча дія регулятора 7. На практиці найбільш часто використовують загально відомий пропорційно-інтегральнодиференціальний (ПІД) закон регулювання, передатна функція якого: 1 UA 72470 U 1 T2p W1 p k11 T p 0,1T p 1 1 2 , (3) k1 де: - коефіцієнт передачі регулятора; T1 5 - час ізодрому; T2 - час упередження. Передатна функція корегуючого зв'язку W2 p визначається по залежності: W3 p W4 p W5 p W2 p де: W3 p W4 p W5 p 10 , (4) - передатна функція ОУ за каналом «u2-Рв»; - передатна функція ОУ за каналом «u2-Рн»; - передатна функція регулятора 7. В якості моделі W3 p прийнята модель: W3 p k3 T3p 1 , (5) де: k 3 - коефіцієнт передачі об'єкта керування; T3 15 - постійна часу об'єкта ння. На управляючу дію, через суматор 4, впливають неконтрольовані збурення fн1. Далі сигнал проходить через об'єкт керування 5 за каналом «u1-Рв» та на виході отримуємо поточне значення змінної Рв. зд 20 Задане значення тиску низу колони Рн надходить в суматор 6, куди також подається поточне значення Рн, після якого ми отримуємо похибку регулювання ΔΡн, яка надходить в управляючий пристрій 7. Після управляючого пристрою отримуємо управляючу дію u2, яка формує управляючу дію відповідно до залежності: зд U2 t W5 p Pн Рн 25 30 , (6) де: W5 p - передатна функція регулятора 7; Проходячи через корегуючий зв'язок 8, сигнал надає компенсуючий вплив на ΔΡв, а також, через суматор 9, де u2 складається з неконтрольованими збуреннями fн2, проходить через об'єкт керування 5 за каналом «u2-Рн», водночас впливаючи на перший канал, створюючи перехресний зв'язок «u2-Рв». На виході об'єкта керування за другим каналом отримуємо поточне значення змінної Рн. зд Задане значення концентрації спирту-ректифікату Qc надходить в суматор 10, куди також подається поточне значення Qc, після якого ми отримуємо похибку регулювання ΔQc, яка надходить в управляючий пристрій 11. Після управляючого пристрою отримуємо управляючу дію u3, яка формує управляючу дію відповідно до залежності: зд U3 t W6 p Qc Qc 35 , (7) де: W6 p - передатна функція регулятора 11. Далі сигнал проходить через суматор 12, де u3 складається з неконтрольованими збуреннями fн3 та проходить через об'єкт керування 5 по каналу u3-Qc. На виході отримуємо поточне значення змінної Qc. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 40 Спосіб автоматичного керування процесом дистиляції спирту в бражній колоні, що включає регулювання тиску верху колони, тиску низу колони та концентрації спирту на виході, який відрізняється тим, що для компенсації впливу тиску низу колони на тиск верху колони вводять корегуючий зв'язок, який реалізують передатною функцією: 45 W2 p W3 p W4 p W5 p 2 UA 72470 U де: W3 p - передатна функція ОУ за каналом "u2-Рв"; W4 p - передатна функція ОУ за каналом "u2-Рн"; W5 p - передатна функція регулятора 7. Комп’ютерна верстка І. Скворцова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of automatic control of alcohol distillation process in a distillation column
Автори англійськоюLevinskyi Valerii Mykhailovych, Stryha Andrii Anatoliiovych
Назва патенту російськоюСпособ автоматического управления процессом дистилляции спирта в бражной колонне
Автори російськоюЛевинский Валерий Михайлович, Стрига Андрей Анатольевич
МПК / Мітки
МПК: B01D 3/42
Мітки: автоматичного, керування, бражній, процесом, спосіб, спирту, колони, дистиляції
Код посилання
<a href="https://ua.patents.su/5-72470-sposib-avtomatichnogo-keruvannya-procesom-distilyaci-spirtu-v-brazhnijj-koloni.html" target="_blank" rel="follow" title="База патентів України">Спосіб автоматичного керування процесом дистиляції спирту в бражній колоні</a>
Спосіб автоматичного керування процесом ректифікації спирту в ректифікаційній колоні
Номер патенту: 31122
Опубліковано: 25.03.2008
Автори: Трач Олександр Романович, Хобін Віктор Андрійович
МПК: B01D 3/26
Мітки: ректифікаційній, автоматичного, колони, керування, ректифікації, спосіб, спирту, процесом
Формула / Реферат:
Спосіб автоматичного керування процесом ректифікації спирту в ректифікаційній колоні, що передбачає вимірювання температури на контрольній тарілці, тиску колони і тиску в нижній частині колони, а також регулювання температури на контрольній тарілці шляхом регулювання подачі охолоджуючої води, регулювання тиску в верхній частині колони регулюванням відбору спирту і регулювання тиску в нижній частині колони регулюванням подачі пари в...
Спосіб автоматичного керування процесом мембранної дистиляції
Номер патенту: 69081
Опубліковано: 25.04.2012
Автори: Ладієва Леся Ростиславівна, Дубік Роман Миколайович
МПК: B01D 3/42
Мітки: автоматичного, спосіб, керування, мембранної, процесом, дистиляції
Формула / Реферат:
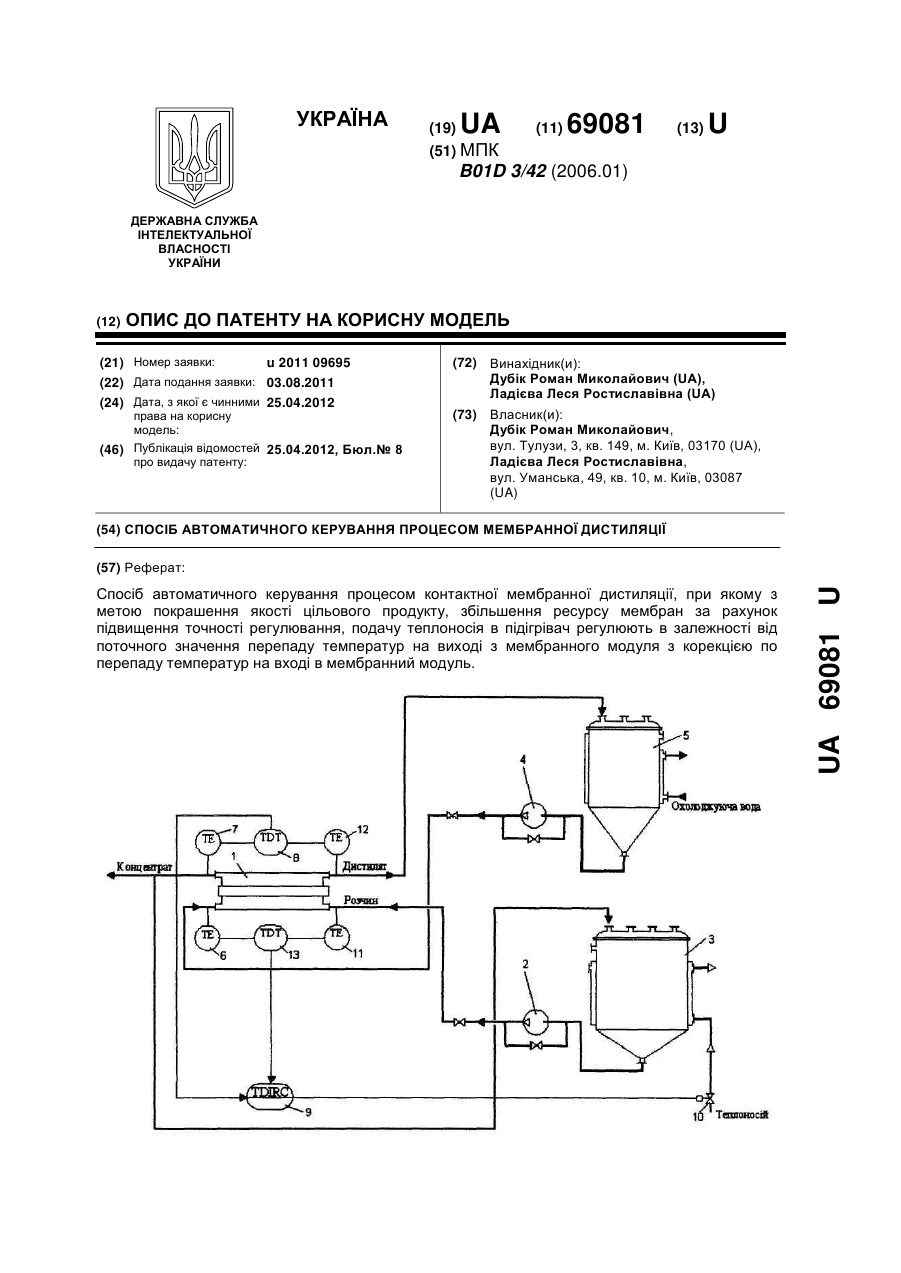
Спосіб автоматичного керування процесом контактної мембранної дистиляції шляхом регулювання подачі теплоносія у нагрівач, який відрізняється тим, що з метою покрашення якості цільового продукту, збільшення ресурсу мембран за рахунок підвищення точності регулювання, подачу теплоносія в підігрівач регулюють в залежності від поточного значення перепаду температур на виході з мембранного модуля з корекцією по перепаду температур на вході в...
Спосіб автоматичного керування процесом мембранної дистиляції
Номер патенту: 68019
Опубліковано: 12.03.2012
Автори: Ладієва Леся Ростиславівна, Дубік Роман Миколайович
МПК: B01D 3/42
Мітки: процесом, автоматичного, мембранної, керування, дистиляції, спосіб
Формула / Реферат:
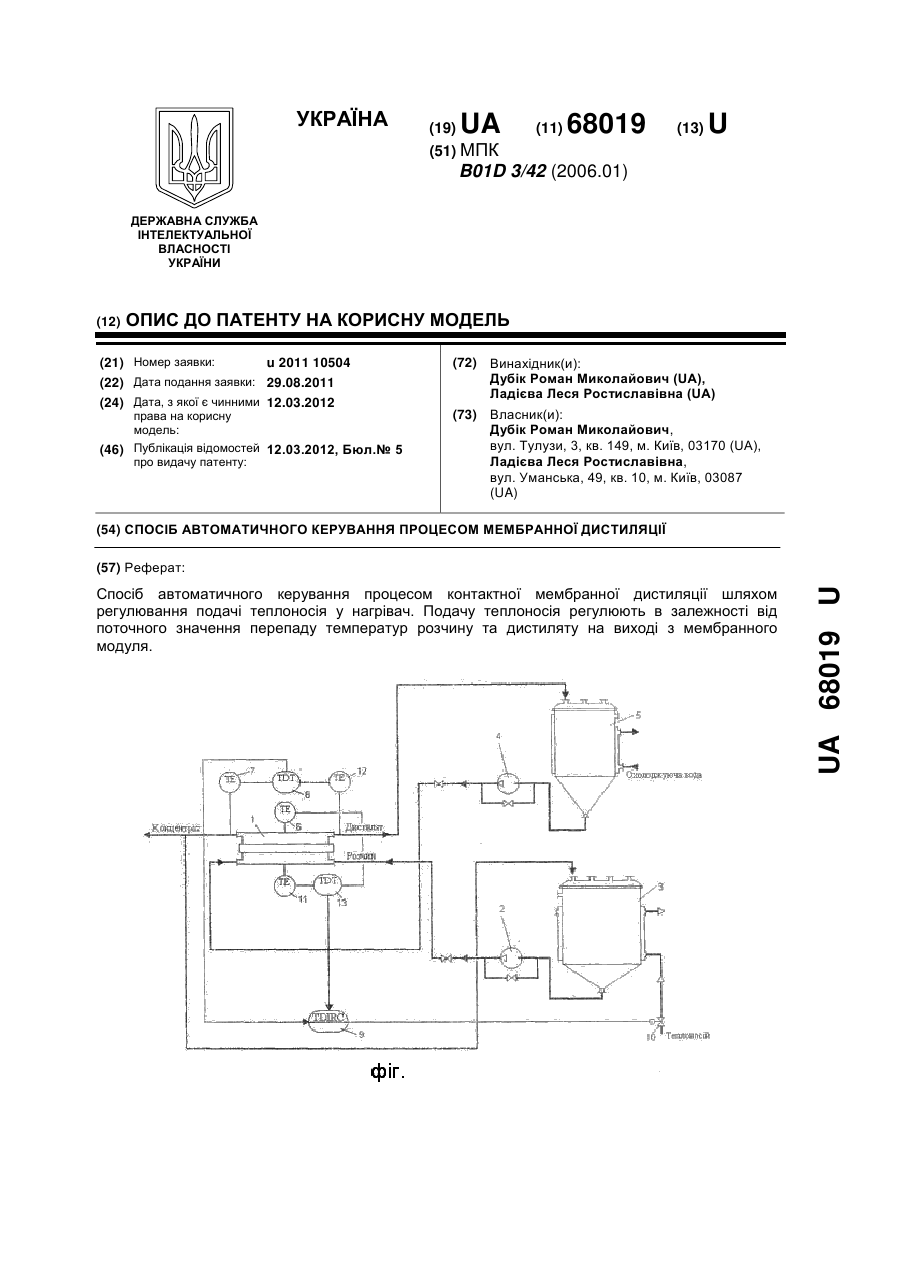
Спосіб автоматичного керування процесом контактної мембранної дистиляції шляхом регулювання подачі теплоносія у нагрівач, який відрізняється тим, що подачу теплоносія в підігрівач регулюють в залежності від поточного значення перепаду температур розчину та дистиляту на виході з мембранного модуля з корекцією по перепаду температур в середній точці каналу.
Спосіб автоматичного керування процесом мембранної дистиляції
Номер патенту: 57931
Опубліковано: 25.03.2011
Автори: Жулинський Олександр Анатолійович, Ладієва Леся Ростиславівна
МПК: B01D 3/42
Мітки: спосіб, процесом, дистиляції, мембранної, керування, автоматичного
Формула / Реферат:
Спосіб автоматичного керування процесом контактної мембранної дистиляції шляхом регулювання подачі теплоносія у нагрівач, який відрізняється тим, що, для покращення якості цільового продукту, збільшення ресурсу мембран за рахунок підвищення точності регулювання, подачу теплоносія в підігрівач регулюють в залежності від поточного значення перепаду температур на виході з мембранного модуля з корекцією по концентрації розчину на виході.
Спосіб автоматичного керування процесом ректифікації триколонної брагоректифікаційної установки непрямої дії
Номер патенту: 55823
Опубліковано: 27.12.2010
Автори: Щелчков Олександр Вікторович, Воінова Світлана Олександрівна
МПК: B01D 3/42
Мітки: брагоректифікаційної, керування, спосіб, триколонної, непрямо, процесом, установки, дії, автоматичного, ректифікації
Формула / Реферат:
Спосіб керування процесом ректифікації триколонної брагоректифікаційної установки непрямої дії, що включає дотримання тиску верху і низу епюраційної колони БРУ і рівня спирту-епюрату, який відрізняється тим, що при цьому підтримку тиску й рівня здійснюють за пропорційно-інтегрально-диференційним (ПІД) алгоритмом в повному об'ємі вказаною установкою одночасно й безупинно, що покращує динамічну якість процесів.