Спосіб автоматичного керування процесом ректифікації триколонної брагоректифікаційної установки непрямої дії
Номер патенту: 55823
Опубліковано: 27.12.2010
Автори: Воінова Світлана Олександрівна, Щелчков Олександр Вікторович
Формула / Реферат
Спосіб керування процесом ректифікації триколонної брагоректифікаційної установки непрямої дії, що включає дотримання тиску верху і низу епюраційної колони БРУ і рівня спирту-епюрату, який відрізняється тим, що при цьому підтримку тиску й рівня здійснюють за пропорційно-інтегрально-диференційним (ПІД) алгоритмом в повному об'ємі вказаною установкою одночасно й безупинно, що покращує динамічну якість процесів.
Текст
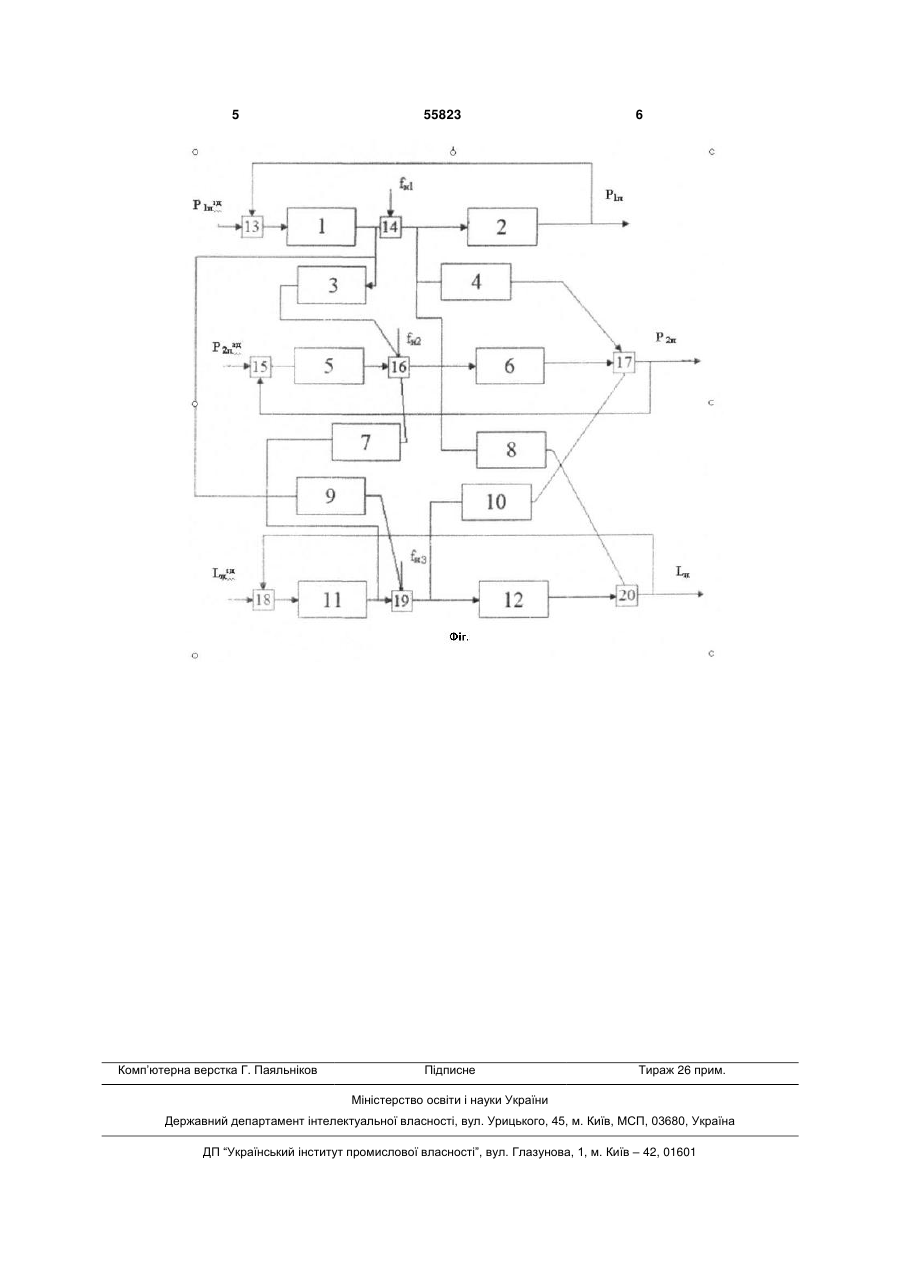
Спосіб керування процесом ректифікації триколонної брагоректифікаційної установки непрямої 3 зом з головними домішками випаровуватиметься і основний продукт, а це економічно невигідно. Завищення температури верху колони недопустимо. Це може привести до недоконденсації спиртної пари, і попаданню цієї пари у виробничі приміщення або в атмосферу. Заниження температури верху економічно невигідно, оскільки йде перевитрата мережевої води. Аналогічні наслідки спостерігатимуться при заниженні або завищенні тиску верху і низу колони. Важливим параметром є також рівень епюрату. Завищення рівня епюрату чревате втратами основного продукту, а його заниження - порушенням процесу теплообміну в кубі колони. Поточні значення нормативних параметрів завжди відрізняються від номінальних і можуть виходити за межі допусків унаслідок зміни умов, у яких відбувається процес. В основу корисної моделі покладена задача підвищення якості керування у епюраційній колоні БРУ тиску верху і низу епюраційної колони БРУ і рівня спирту-епюрату шляхом дотримання цих параметрів на рівні нормативних значень, підвищення швидкодії системи керування та її динамічної точності. Відповідно до пропонованого способу керування трьохколонною брагоректифікаційною установкою непрямої дії, що містить дотримання тиску верху і низу епюраційної колони БРУ і рівня спирту-епюрату, при цьому підтримку тиску й рівня здійснюють за пропорційно-інтегральнодиференційним (ПІД) алгоритмом в повному об'ємі вказаною установкою одночасно й безупинно. Пропонований спосіб дозволяє здійснювати регулювання тиску і рівня в широкому діапазоні регульованих параметрів. На Фіг. показано блок-схему запропонованого способу автоматичного керування, що реалізується таким чином. Вхідний сигнал заданого тиску Р1пзд надходить на суматор 13, з виходу якого надходить на регулятор 1, що регулює вплив з виходу якого шумується в суматорі 14 з неконтрольованими збуреннями fн1 і надходить на об'єкт 2, на виході якого 55823 4 формується сигнал Р1п, який у зворотному зв'язку надходить на суматор 13. Вхідний сигнал заданого тиску Р2пзд надходить на суматор 15, з виходу якого надходить на регулятор 5, регулюючий вплив з виходу якого шумується в суматорі 16 з неконтрольованими збуреннями fн2, і сигнал корегую чого зв'язку 3 надходить на суматор 16, сигнал з виходу якого надходить на об'єкт 6. Сигнал з виходу об'єкту 6 надходить на суматор 17, на виході якого формується сигнал Р2п, який у зворотному зв'язку надходить на суматор 15. Вхідний сигнал заданого рівня Lпзд надходить на суматор 18, з виходу якого надходить на регулятор 11, регулюючий вплив з виходу якого сумується в суматорі 19 з неконтрольованими збуреннями fн3, і сигнал корегуючого зв'язку 9 надходить на суматор 19, сигнал з виходу якого надходить на об'єкт 12. Сигнал з виходу об'єкту 12 надходить на суматор 20, на виході якого формується сигнал Lп, який у зворотному зв'язку надходить на суматор 18. Сигнал з виходу регулятора 1 також надходить на корегуючий зв'язок 3, з виходу якого надходить на суматор 16. Сигнал з виходу суматора 14 надходить на корегуючий зв'язок 4, з виходу якого надходить на суматор 17. Сигнал із суматора 16 також надходить на корегуючий зв'язок 7, з виходу якого надходить на вихід регулятора 11. Сигнал з виходу регулятора 1 також надходить на корегуючий зв'язок 9, з виходу якого надходить на суматор 19. Сигнал з виходу суматора 14 через перехресний зв'язок об'єкту керування 8 надходить на суматор 20. Сигнал з виходу суматора 19 також через перехресний зв'язок об'єкту керування 10 надходить на суматор 17. У порівнянні з аналогом запропонований спосіб забезпечує значно кращі показники перехідних процесів регулювання параметрів трьохколонної брагоректифікаційної установки непрямої дії і таким способом підвищення якості готової продукції. 5 Комп’ютерна верстка Г. Паяльніков 55823 6 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of control of rectification process of three-column wash rectification installation of indirect action
Автори англійськоюSchelchkov Oleksandr Viktorovych, Voinova Svitlana Oleksandrivna
Назва патенту російськоюСпособ управления процессом ректификации трехколонной брагоректификационной установки непрямого действия
Автори російськоюЩелчков Александр Викторович, Воинова Светлана Александровна
МПК / Мітки
МПК: B01D 3/42
Мітки: дії, триколонної, ректифікації, непрямо, установки, автоматичного, брагоректифікаційної, спосіб, керування, процесом
Код посилання
<a href="https://ua.patents.su/3-55823-sposib-avtomatichnogo-keruvannya-procesom-rektifikaci-trikolonno-bragorektifikacijjno-ustanovki-nepryamo-di.html" target="_blank" rel="follow" title="База патентів України">Спосіб автоматичного керування процесом ректифікації триколонної брагоректифікаційної установки непрямої дії</a>
Спосіб автоматичного керування процесом ректифікації спирту в ректифікаційній колоні
Номер патенту: 31122
Опубліковано: 25.03.2008
Автори: Хобін Віктор Андрійович, Трач Олександр Романович
МПК: B01D 3/26
Мітки: ректифікації, процесом, керування, спосіб, колони, спирту, автоматичного, ректифікаційній
Формула / Реферат:
Спосіб автоматичного керування процесом ректифікації спирту в ректифікаційній колоні, що передбачає вимірювання температури на контрольній тарілці, тиску колони і тиску в нижній частині колони, а також регулювання температури на контрольній тарілці шляхом регулювання подачі охолоджуючої води, регулювання тиску в верхній частині колони регулюванням відбору спирту і регулювання тиску в нижній частині колони регулюванням подачі пари в...
Спосіб автоматичного керування процесом сушіння крупи
Номер патенту: 53007
Опубліковано: 27.09.2010
Автори: Кириченко Віктор Іванович, Трішин Федір Анатолійович
МПК: B02B 1/00
Мітки: спосіб, сушіння, процесом, керування, автоматичного, крупи
Формула / Реферат:
Спосіб автоматичного керування процесом сушіння крупи, який містить завантаження крупи, витримку її протягом заданого проміжку часу, підтримку температури й відносної вологості та розвантаження сухої крупи, який відрізняється тим, що підтримку температури й відносної вологості середовища здійснюють за пропорційно-інтегрально-диференціальним алгоритмом в повному об'ємі крупи одночасно й безупинно, підтримку температуру здійснюють в діапазоні...
Спосіб автоматичного керування процесом розстійки тіста при виробництві хліба
Номер патенту: 53004
Опубліковано: 27.09.2010
Автори: Таран Євген Григорович, Левінський Валерій Михайлович
МПК: A21C 13/00
Мітки: керування, виробництві, спосіб, процесом, автоматичного, хліба, розстійки, тіста
Формула / Реферат:
Спосіб автоматичного керування процесом розстійки тіста при виробництві хліба, що включає завантаження розстійної шафи тістовими заготовками, витримку їх протягом заданого проміжку часу, підтримку температури й відносної вологості та розвантаження розстояних тістових заготовок, при цьому підтримку температури й відносної вологості середовища здійснюють за пропорційно-інтегрально-диференціальним алгоритмом в повному об'ємі розстійної шафи...
Спосіб автоматичного керування процесом сушіння макаронів
Номер патенту: 50513
Опубліковано: 10.06.2010
Автори: Левінський Валерій Михайлович, Бабинін Ярослав Миколайович
МПК: A23L 1/16
Мітки: автоматичного, макаронів, керування, сушіння, спосіб, процесом
Формула / Реферат:
Спосіб автоматичного керування процесом сушіння макаронів, що включає вимірювання температури та вологості сушильного агента, який відрізняється тим, що регулюють різницю температури сушильного агента на вході та виході з сушильної шафи з урахуванням дії корегуючого зв'язку та регулюють розрідження в шафі шляхом зміни частоти обертання двигуна вентилятора.
Спосіб автоматичного керування процесом сушіння ковбасних виробів у сушильній камері
Номер патенту: 53048
Опубліковано: 27.09.2010
Автори: Голуб Євген Сергійович, Муратов Віктор Георгійович
МПК: A23B 4/03
Мітки: керування, сушіння, ковбасних, сушильний, процесом, виробів, автоматичного, спосіб, камери
Формула / Реферат:
Спосіб автоматичного керування процесом сушіння ковбасних виробів у сушильній камері, що включає вимірювання температури та вологості в камері, який відрізняється тим, що підтримують температуру та вологість в камері на заданих значеннях за допомогою зміни напруги ТЕНа та зміни кількості обертів компресора та одночасно підвищують динамічну точність системи управління за каналами регулювання за рахунок забезпечення компенсації запізнення у...
Попередній патент: Спосіб діагностики змішаної мікоплазмо-герпесвірусної інфекції у хворих з патологією дихальних шляхів
Наступний патент: Накладка рейкового стикового ізолюючого з’єднання
Випадковий патент: Високонапірна радіально-осьова гідротурбіна з поворотними вихідними кромками лопатей робочого колеса