Спосіб прицілювання космічної ракети-носія на морській стартовій платформі
Номер патенту: 72929
Опубліковано: 10.09.2012
Автори: Казимир Володимир Вікторович, Железняк Олег Олександрович, Хомушко Дмитро Валерійович, Кравченко Артем Олегович, Бурачек Всеволод Германович
Формула / Реферат
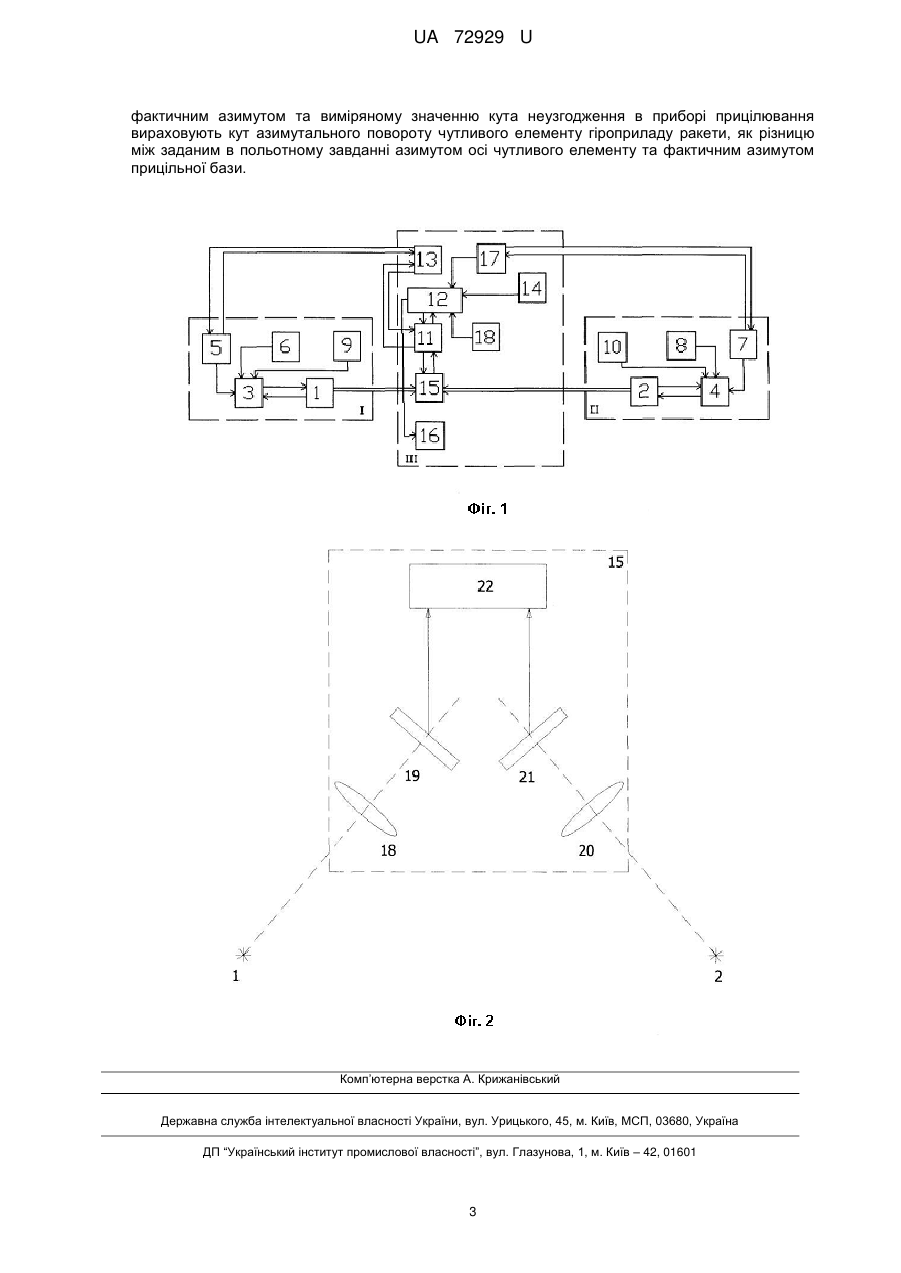
Спосіб передстартового прицілювання космічної ракети-носія на морській стартовій платформі, заснований на оптико-електронному двопроменевому методі зв'язку бортового приладу прицілювання зі світовими марками прицільної бази на місцевості, який відрізняється тим, що з врахуванням орієнтації та місцеположення морської стартової платформи задають на поверхні моря координати точок положення світлових марок прицільної бази, що знаходяться на двох спеціальних кораблях, направляють ці кораблі в ці точки та утримують кораблі в них, при цьому осі світлових конусів марок орієнтують за азимутом та кутом місця на приладовий відсік ракети в точку положення бортового прицільного приладу, при цьому вимірюють кут неузгодження між напрямом чутливої осі бортового приладу прицілювання і напрямом прицільної бази, що створюється світловими марками на кораблях, місцеположення яких контролюють за допомогою GPS-приймачів на кораблях поточні координати марок, які дистанційно передають на центральний пост управління прицілювання, де за відомим фактичним азимутом та виміряному значенню кута неузгодження в приборі прицілювання вираховують кут азимутального повороту чутливого елементу гіроприладу ракети, як різницю між заданим в польотному завданні азимутом осі чутливого елементу та фактичним азимутом прицільної бази.
Текст
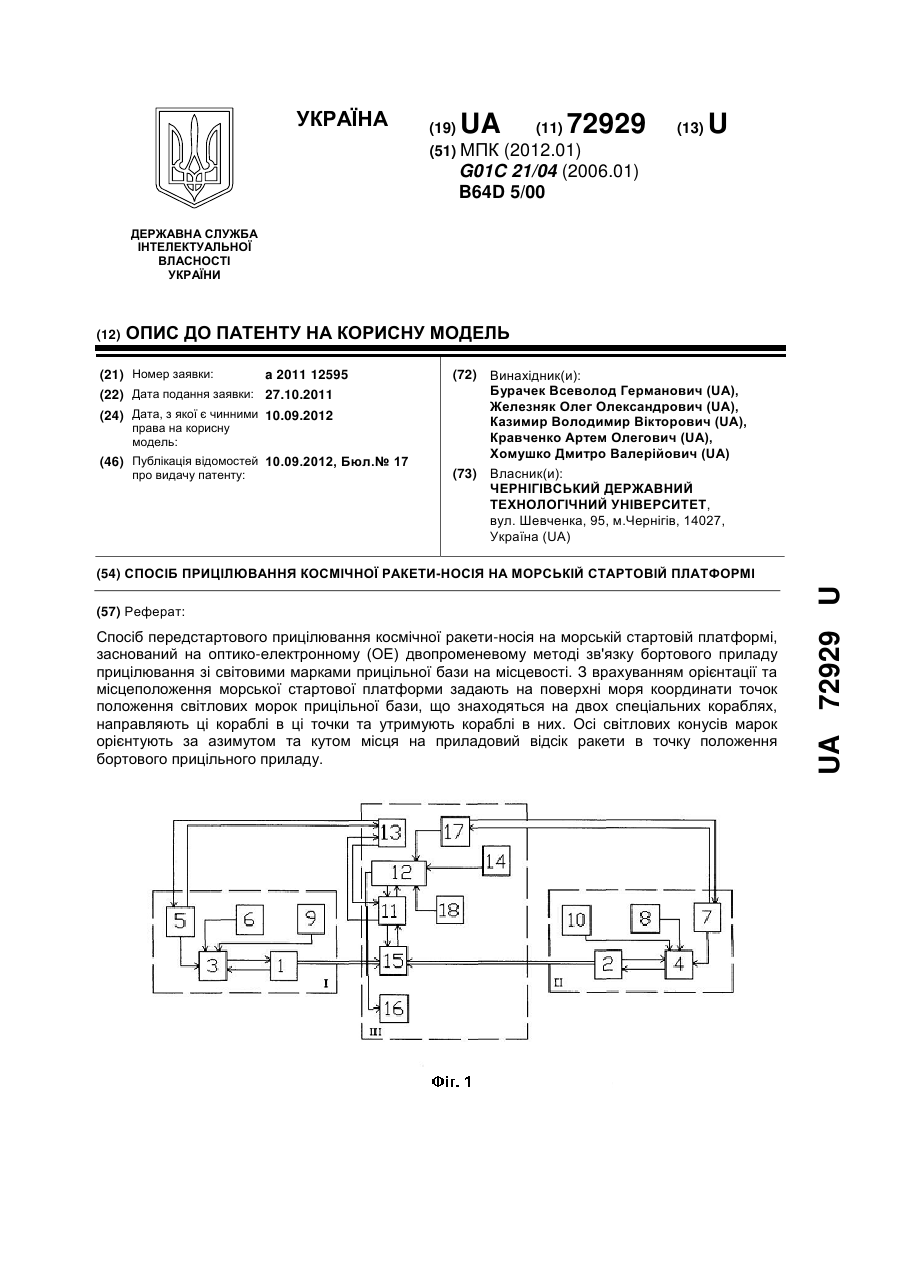
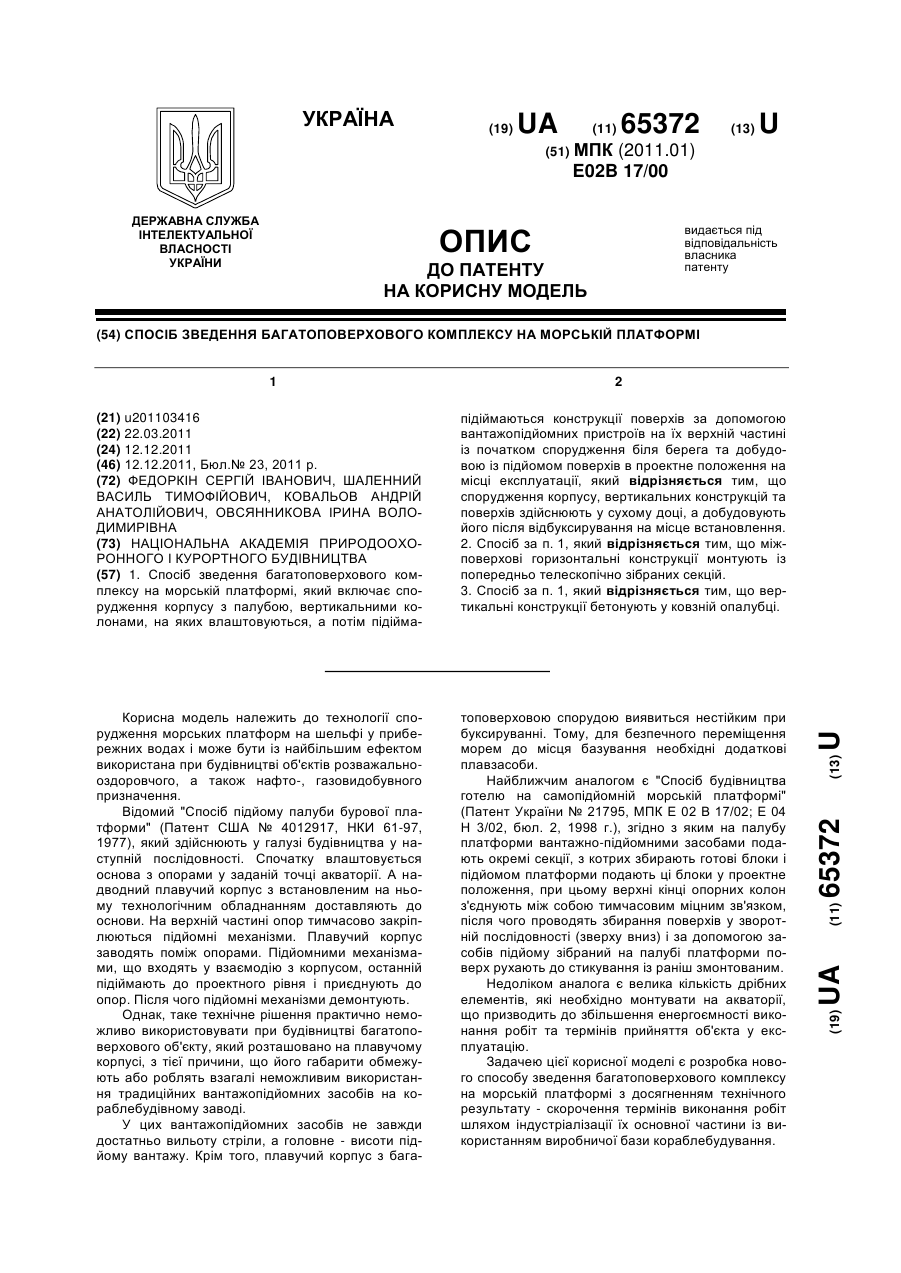
Реферат: Спосіб передстартового прицілювання космічної ракети-носія на морській стартовій платформі, заснований на оптико-електронному (ОЕ) двопроменевому методі зв'язку бортового приладу прицілювання зі світовими марками прицільної бази на місцевості. З врахуванням орієнтації та місцеположення морської стартової платформи задають на поверхні моря координати точок положення світлових морок прицільної бази, що знаходяться на двох спеціальних кораблях, направляють ці кораблі в ці точки та утримують кораблі в них. Осі світлових конусів марок орієнтують за азимутом та кутом місця на приладовий відсік ракети в точку положення бортового прицільного приладу. UA 72929 U (54) СПОСІБ ПРИЦІЛЮВАННЯ КОСМІЧНОЇ РАКЕТИ-НОСІЯ НА МОРСЬКІЙ СТАРТОВІЙ ПЛАТФОРМІ UA 72929 U UA 72929 U 5 10 15 20 25 30 35 40 45 50 55 Запропонований спосіб належить до області геодезії, зокрема до методів геодезичної азимутної прив'язки ракет. Відомі різні способи і системи прицілювання ракет: - автоколімаційний метод [1], - спосіб двопроменевої прив'язки прицільної бази з автономним визначенням бази гіротеодолітами [2, 3, 4], при цьому в сучасних системах прицілювання широко застосовується автоматичні оптико-електронні прилади [4] - гіростабілізаційні методи [3, 5]. Недоліком перерахованих способів прицілювання є обов'язкові вимоги стабільності прицільної бази, закріпленої на місцевості. Як аналог, що приймається за прототип, можна прийняти автоматизований спосіб двопроменевої прив'язки прицільної бази [4], в основу якого закладений спосіб вимірювання кутів теодолітом [6], при визначенні азимута гіротеодолітом [7]. Задачею корисної моделі є створення способу прицілювання космічної ракети-носія на морській стартовій платформі, що дозволяє одержувати високу точність при обліку поточного вимірювання координат прицільної бази на морській поверхні. Поставлена задача вирішується за рахунок створення способу передстартового прицілювання космічної ракети-носія на морській стартовій платформі, заснований на оптикоелектронному (ОЕ) двопроменевому методі зв'язку бортового приладу прицілювання зі світовими марками прицільної бази на місцевості, який відрізняється тим, що з врахуванням орієнтації та місцеположення морської стартової платформи задають на поверхні моря координати точок положення світлових морок прицільної бази, що знаходяться на двох спеціальних кораблях, направляють ці кораблі в ці точки та утримують кораблі в них, при цьому осі світлових конусів марок орієнтують за азимутом та кутом місця на приладовий відсік ракети в точку положення бортового прицільного приладу, при цьому вимірюють кут неузгодження між напрямом чутливої вісі бортового приладу прицілювання і напрямом прицільної бази, що створюється світловими марками на кораблях, місцеположення яких контролюють за допомогою GPS-приймачів на кораблях поточні координати марок, які дистанційно передають на центральний пост управління прицілювання, де за відомим фактичним азимутом та виміряному значенню кута неузгодження в приборі прицілювання вираховують кут азимутального повороту чутливого елементу (ЧЕ) гіроприладу ракети, як різницю між заданим в польотному завданні азимутом вісі ЧЕ та фактичним азимутом прицільної бази. Технічним результатом запропонованого рішення є підвищення точності передстартового прицілювання космічної ракети-носія в умовах відкритого моря, при цьому забезпечується високоточне відстежування азимутального положення чуттєвого елементу ракети. На фіг. 1 представлена блок-схема системи для реалізації запропонованого способу. І, ІІ - навігаційно-геодезичні системи (НГС) кораблів азимутальної прив'язки (далі КАП-1 і КАП-2); 1, 2 - блоки світлових модульованих сигналів марок КАП; 3,4 - блок управління НГС КАП; 5, 7 - прийомо-передавальні пристрої радіозв'язку КАП; 6-8 - приймачі супутникових сигналів GPS КАП; 9, 10 - блоки навігаційних приладів НГС КАП; III - морська стартова платформа (МСП); 11 - центральний пост управління прицілюванням ракети; 12 - блок обробки інформації; 13 - передавачі радіозв'язку МСП; 14 - гірокомпас МСП; 15 - оптико-електронний прилад прицілювання ракети; 16 - гіроприлад ракети; 17 - приймач супутникових сигналів GPS на МСП; 18, 20 - об'єктиви ОЕ каналів; 19, 21 - фотоприймальні матриці ОЕ каналів; 22 - блок порівняння азимутального положення сигналів. Система прицілювання працює таким чином: при включенні системи за командою блока 11 (центральний пост управління МСП на фіг. 1) блок 12 приймає інформацію від блоків 14, 17, 18 та обробляє її, визначаючи орієнтацію і місцеположення МСП (ракети-носія), а також визначаючи координати точок в які повинні ввійти кораблі азимутної прив'язки КАП-1 і КАП-2 і азимути осей світлових сигналів блоків 1 і 2. 1 UA 72929 U 5 10 15 20 25 30 35 40 45 З блоку 11 передають команду на КАП-1 і КАП-2 через блоки 13, 5 і 7 зайняти позиції в заданих точках з координатами, визначеними блоком 12. В процесі виходу КАП-1 і КАП-2 на задані позиції залежно від орієнтації МСП відповідно блок 12 коректує задані координати точок КАП-1 і КАП-2 і азимутальне положення осей світлових сигналів блоків 1 і 2. У момент виходу КАП-1 і КАП-2 на задані координати і заданого орієнтування осей світлових сигналів блоків 1 і 2 блоки 3 і 4 повідомляють про це в блок 11 через блоки 5, 7, 13. При цьому прилад 15 подає сигнал в блок 11 про наявність світлових сигналів блоків 1 і 2 в полі зору приладу 15. З блоку 11 подають команду в прилад 15 на проведення вимірювання величини світлових блоків 1 і 2. Прилад 15 передає виміряну величину азимутального узгодження в блок 12, який коректує сигнал, визначаючої положення чутливого елемента гіроприладу ракети-носія. На фіг. 2 показана блок-схема ОЕ приладу прицілювання ракети 15. Прилад виконано двоканальним аналогічно двохпроменевому приладу описаному в [2]. Кожний з двох ОЕ каналів містить об'єктив (18, 20) та фотоприймальну матрицю (19, 21) з передпідсилювачем сигналу. Також прилад 15 містить блок 22 - порівняння азимутального положення сигналів 1 та 2 та поточного значення азимута контрольно стикувальної площини гіроприладу ракети. Елементи каналів 18, 19, 20 та 21 жорстко установлені в єдиному корпусі. Стикувальні площини цього корпусу та візирні осі каналів 18-19 та 20-21 жорстко встановлені в паралельних площинах, при цьому візирні осі симетричні відносно вертикальної осі ракети. Відзначимо, що кожний КАП має автономну НГС і одержує від блоку 12 тільки задані координати і азимут осі світлового сигналу. При цьому НГС КАП самостійно визначає свій курс і обчислює пеленг вісі світлового сигналу. Наприклад, блок управління 3 в НГС КАП - 1 одержуючи дані про поточне місцеположення, курс, швидкості ходу та ін. від блоків 6 і 9, визначає необхідні сигнали для управління кораблем і поворотним механізмом блоку 1, щоб утримувати КАП-1 в зоні заданої блоком 12 точки з визначено допустимою точністю і утримувати вісь світлового променя блоку 1 в заданому азимуті. Аналогічно виконує роботу НГС КАП - 2. Таким чином, запропонована технологія забезпечує азимутальне прицілювання чутливого елементу ракети-носія на морській стартовій платформі з достатньо високою точністю, яка залежить в основному від віддаленості кораблів азимутної прив'язки платформи. При невеликому хвилюванні моря і дистанції між КАП-1 і КАП-2 приблизно 5 км можна досягти точності не гірше 30 кут. сек. Джерела інформації: 1. Ефимов М.Ф. Следящие системы с оптическими связями. - М.: Энергия, 1969.-184 с. - ст. 15. 2. Кашеваров Ю.Б., Гироскопическое ориентирование. - М.: Воениздат, 1964.-210 с. 3. Назаров Б.И. Гироскоп на ракете. - М: Воениздат, 1964.-170 с. 4. Ефимов М.В. Прицеливание баллистических ракет. - М: Воениздат, 1968.-120 с.-ст. 33-35. 5. Ягодкин В.В., Хлебников Г.А. Гироприборы баллистических ракет. - М.: Воениздат, 1967.191 с. - ст. 25, 26. 6. Островський А.Л., Мороз О.І., Тарнавський В.Л., Геодезія частина II: підручник для вузів. Львів. НУ "Львівська політехніка", 2007.-508 с -ст. 160-171. 7. Афанасьев В.Г., Муравьев А.В. Геодезия и маркшейдерское дело в транспортном строительстве. - М.: Недра, 1987.-440 с. - ст. 277-287. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 50 55 60 Спосіб передстартового прицілювання космічної ракети-носія на морській стартовій платформі, заснований на оптико-електронному двопроменевому методі зв'язку бортового приладу прицілювання зі світовими марками прицільної бази на місцевості, який відрізняється тим, що з врахуванням орієнтації та місцеположення морської стартової платформи задають на поверхні моря координати точок положення світлових марок прицільної бази, що знаходяться на двох спеціальних кораблях, направляють ці кораблі в ці точки та утримують кораблі в них, при цьому осі світлових конусів марок орієнтують за азимутом та кутом місця на приладовий відсік ракети в точку положення бортового прицільного приладу, при цьому вимірюють кут неузгодження між напрямом чутливої осі бортового приладу прицілювання і напрямом прицільної бази, що створюється світловими марками на кораблях, місцеположення яких контролюють за допомогою GPS-приймачів на кораблях поточні координати марок, які дистанційно передають на центральний пост управління прицілювання, де за відомим 2 UA 72929 U фактичним азимутом тавиміряному значенню кута неузгодження в приборі прицілювання вираховують кут азимутального повороту чутливого елементу гіроприладу ракети, як різницю між заданим в польотному завданні азимутом осі чутливого елементу та фактичним азимутом прицільної бази. Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for aiming a space carrier rocket on a sea launching platform
Автори англійськоюBurachek Vsevolod Hermanovych, Zhelezniak Oleh Oleksandrovych, Kazymyr Volodymyr Viktorovych, Kravchenko Artem Olehovych, Khomushko Dmytro Valeriiovych
Назва патенту російськоюСпособ прицеливания космической ракеты-носителя на морской стартовой платформе
Автори російськоюБурачек Всеволод Германович, Железняк Олег Александрович, Казимир Владимир Викторович, Кравченко Артем Олегович, Хомушко Дмитрий Валериевич
МПК / Мітки
МПК: B64D 5/00, G01C 21/04
Мітки: стартовий, морській, спосіб, космічної, платформи, прицілювання, ракети-носія
Код посилання
<a href="https://ua.patents.su/5-72929-sposib-pricilyuvannya-kosmichno-raketi-nosiya-na-morskijj-startovijj-platformi.html" target="_blank" rel="follow" title="База патентів України">Спосіб прицілювання космічної ракети-носія на морській стартовій платформі</a>
Спосіб зведення багатоповерхового комплексу на морській платформі
Номер патенту: 65372
Опубліковано: 12.12.2011
Автори: Ковальов Андрій Анатолійович, Федоркін Сергій Іванович, Овсянникова Ірина Володимирівна, Шаленний Василь Тимофійович
МПК: E02B 17/00
Мітки: морській, комплексу, багатоповерхового, спосіб, платформи, зведення
Формула / Реферат:
1. Спосіб зведення багатоповерхового комплексу на морській платформі, який включає спорудження корпусу з палубою, вертикальними колонами, на яких влаштовуються, а потім підіймаються конструкції поверхів за допомогою вантажопідйомних пристроїв на їх верхній частині із початком спорудження біля берега та добудовою із підйомом поверхів в проектне положення на місці експлуатації, який відрізняється тим, що спорудження корпусу, вертикальних...
Спосіб будівництва готеля на самопідйомній морській платформі
Номер патенту: 21795
Опубліковано: 30.04.1998
Автори: Катвалюк Анатолій Лазарович, Кононов Володимир Павлович, Калитюк Василь Артемович, Гржебін Михайло Зиновійович
МПК: E02B 17/00, E04H 3/02
Мітки: спосіб, будівництва, самопідйомний, готеля, платформи, морській
Формула / Реферат:
Способ строительства гостиницы на самоподъемной морской платформе, содержащей не менее трех опорных колонн с механизмами подъема и грузоподъемные средства, по которому на палубу платформы грузоподъемными средствами подают отдельные секции металлоконструкций, из них собирают блоки и подъемом платформы подают эти блоки на штатное место, отличающийся тем, что верхние концы опорных колонн между собой соединяют временной прочностной связью,...
Спосіб прицілювання
Номер патенту: 41041
Опубліковано: 27.04.2009
Автори: Туренко Сергій Михайлович, Архипов Микола Іванович, Кравчук Ілля Степанович, Альошин Олександр Михайлович
МПК: F41G 1/00
Мітки: спосіб, прицілювання
Формула / Реферат:
1. Спосіб прицілювання, при якому вмикають приціл, що встановлений на об'єкті військової техніки типу літального апарата, виробляють прицільну марку, спостерігають просторове положення прицільної марки відносно цілі, виконують сполучення прицільної марки з ціллю шляхом коректування просторового положення зазначеного об'єкта військової техніки і на завершальному етапі прицілювання після сполучення прицільної марки з ціллю виконують...
Спосіб прицілювання стрілецької зброї
Номер патенту: 9248
Опубліковано: 15.09.2005
Автори: Васильєв Георгій Іванович, Долженков Олександр Федорович, Квітка Леонід Антонович
МПК: F41G 3/16
Мітки: стрілецької, зброї, спосіб, прицілювання
Формула / Реферат:
Спосіб прицілювання стрілецької зброї, що включає одночасне спостереження за навколишнім простором і зображення прицільної марки, виявлення цілі та суміщення марки з ціллю, який відрізняється тим, що проводять оптико-електронне формування уявної "фантомної" осі прицілювання, при цьому суміщають зображення відеосигналу цілі, сформованого підствольною телевізійною камерою, який передається до монокулярного пристрою відображення за...
Спосіб підготовки головного обтічника ракети до транспортування на залізничній платформі
Номер патенту: 22405
Опубліковано: 25.04.2007
Автори: Шаповалова Галина Микитівна, Ісаєв Віктор Павлович, Мокін Олександр Васильович, Мокін Андрій Олександрович, Миронов Сергій Миколайович, Козлов Анатолій Кузьмич
МПК: B64G 5/00, F42B 15/00
Мітки: підготовки, ракети, спосіб, головного, транспортування, залізничний, обтічника, платформи
Формула / Реферат:
Спосіб підготовки головного обтічника ракети до транспортування на залізничній платформі, що включає встановлення головного обтічника з циліндричними і конічними частинами на ложементи залізничної платформи і кріплення до них, який відрізняється тим, що перед встановленням на ложементи головний обтічник членують на циліндричний і конічний відсіки, а циліндричний відсік членують на стулки і кожну стулку згортають всередину шляхом її обертання...
Попередній патент: Спосіб одержання латуку
Наступний патент: Газорідинний сепаратор
Випадковий патент: Спосіб запобігання гідравлічного удару