Спосіб і пристрій виявлення реалізації граничних сил зчеплення та попередження буксування (юза) колісних пар тягового рейкового транспорту
Номер патенту: 73692
Опубліковано: 15.08.2005
Автори: Павленко Владислав Альбертович, Павленко Антон Альбертович, Павленко Альберт Прокопович
Формула / Реферат
1. Спосіб виявлення реалізації граничних сил зчеплення і попередження буксування (юза) колісних пар тягового рейкового транспорту, згідно з яким реалізацію кожною колісною парою граничних сил її зчеплення з рейками виявляють на інтервалі часу до початку розвитку реального буксування шляхом реєстрації перевищення призначених порогових величин попередньо виділеними за допомогою вузькосмугових частотних фільтрів нормованими гармонічними складовими (опорними гармоніками) сигналу датчика коливань одної з ланок тягового приводу кожної колісної пари і попереджують можливий розвиток буксування (юза) за рахунок включення в момент згаданої реалізації опорними гармоніками, що пройшли смугові частотні фільтри, блоки зрівняння і блоки розпізнання перешкод, виконавчого механізму, який містить систему подачі піску під колісну пару, який відрізняється тим, що як опорні гармоніки використовують по можливості максимальне число гармонічних складових сигналу датчика коливань з частотами, які відповідають частотам власних коливань повної динамічної системи "тяговий електродвигун - тяговий редуктор - колісна пара - рейкова колія" (ТЕД - ТР - КП - РК), а інтенсивність зростання амплітуд опорних гармонік розраховують на всьому шляху руху рейкового транспорту з умов резонансів вимушених коливань в системі ТЕД - ТР - КП - РК від дії збурень з боку рейкової колії і додатково в режимах зрушування згаданого транспорту з місця - з врахуванням розвитку в згаданій системі фрикційних автоколивань.
2. Спосіб за п.1, який відрізняється тим, що виконавчий механізм містить систему змінення діючого на динамічну систему " ТЕД - ТР - КП - РК " тягового або гальмового моменту.
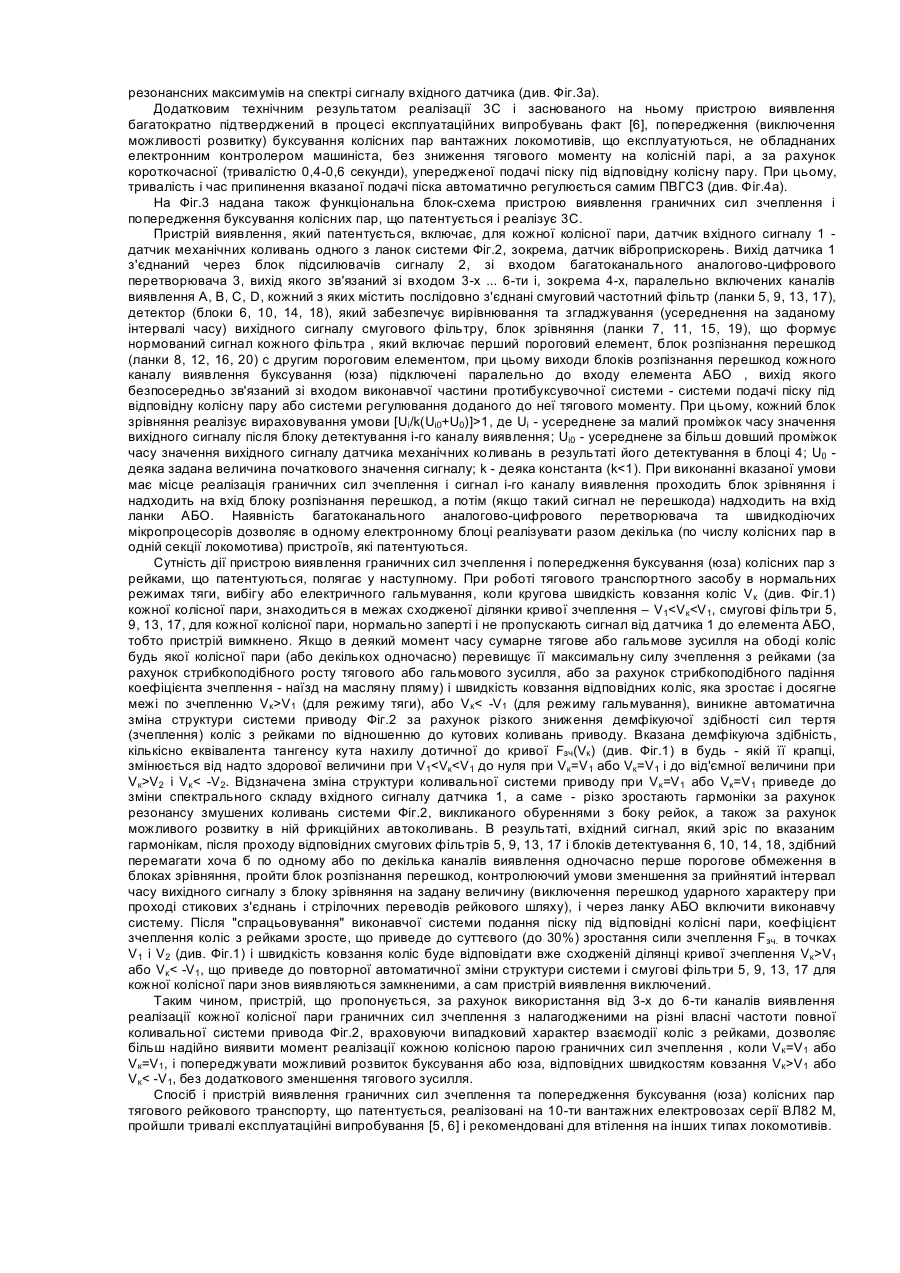
3. Пристрій виявлення граничних сил зчеплення (ПВГСЗ) і попередження буксування (юза) колісних пар рейкового транспорту, що містить датчик механічних коливань приводу кожної колісної пари, вихід якого з'єднаний через блок підсилення сигналу зі входом багатоканального аналого-цифрового перетворювача (АЦП), який відрізняється тим, що містить декілька каналів виявлення буксування (юза), число яких відповідає або максимально наближається до числа частот власних коливань повної динамічної системи тягового приводу колісної пари ТЕД - ТР - КП - РК, причому кожний канал містить послідовно з'єднані вузькосмуговий частотний фільтр, детектор, здатний вирівнювати і зосереджувати на заданому інтервалі часу вхідний сигнал, блок зрівняння, що включає перший пороговий елемент і виконаний з можливістю формування нормованого сигналу за рахунок зрівняння усереднених за різні інтервали часу сигналів вузькосмугових фільтрів і датчика механічних коливань, блок розпізнання перешкод, що містить другий пороговий елемент, при цьому входи вузькосмугових частотних фільтрів кожного згаданого каналу паралельно підключені до виходу АЦП, а виходи блоків розпізнання перешкод кожного згаданого каналу підключені паралельно до входу елемента АБО, вихід якого безпосередньо зв'язаний із входом виконавчого механізму.
4. Пристрій за п. 3, який відрізняється тим, що в залежності від конкретної конструкції тягового приводу колісних пар він може включати від 3-х до 6-ти і більше, зокрема 4, згаданих каналів для кожної колісної пари.
5. Пристрій за п. 3, який відрізняється тим, що блок розпізнання перешкод виконаний з можливістю контролювання умови зменшення вихідного сигналу з блока зрівняння на задану другим пороговим елементом відносну величину за певний інтервал часу, величина якого може змінюватися.
6. Пристрій за п. 3, який відрізняється тим, блок зрівняння виконаний з можливістю зрівняння у ньому усередненого на короткому інтервалі часу сигналу виходу кожного вузькосмугового фільтра з усередненим на більш тривалому інтервалі часу сигналом виходу датчика коливань приводу.
7. Пристрій за п. 3, який відрізняється тим, що блок зрівняння виконаний таким чином, що у ньому сигнали виходу смугових фільтрів попередньо підсумовуються по два або по три, або усі одночасно, а потім сумарні сигнали зрівнюються з усередненим сигналом датчика коливань приводу.
Текст
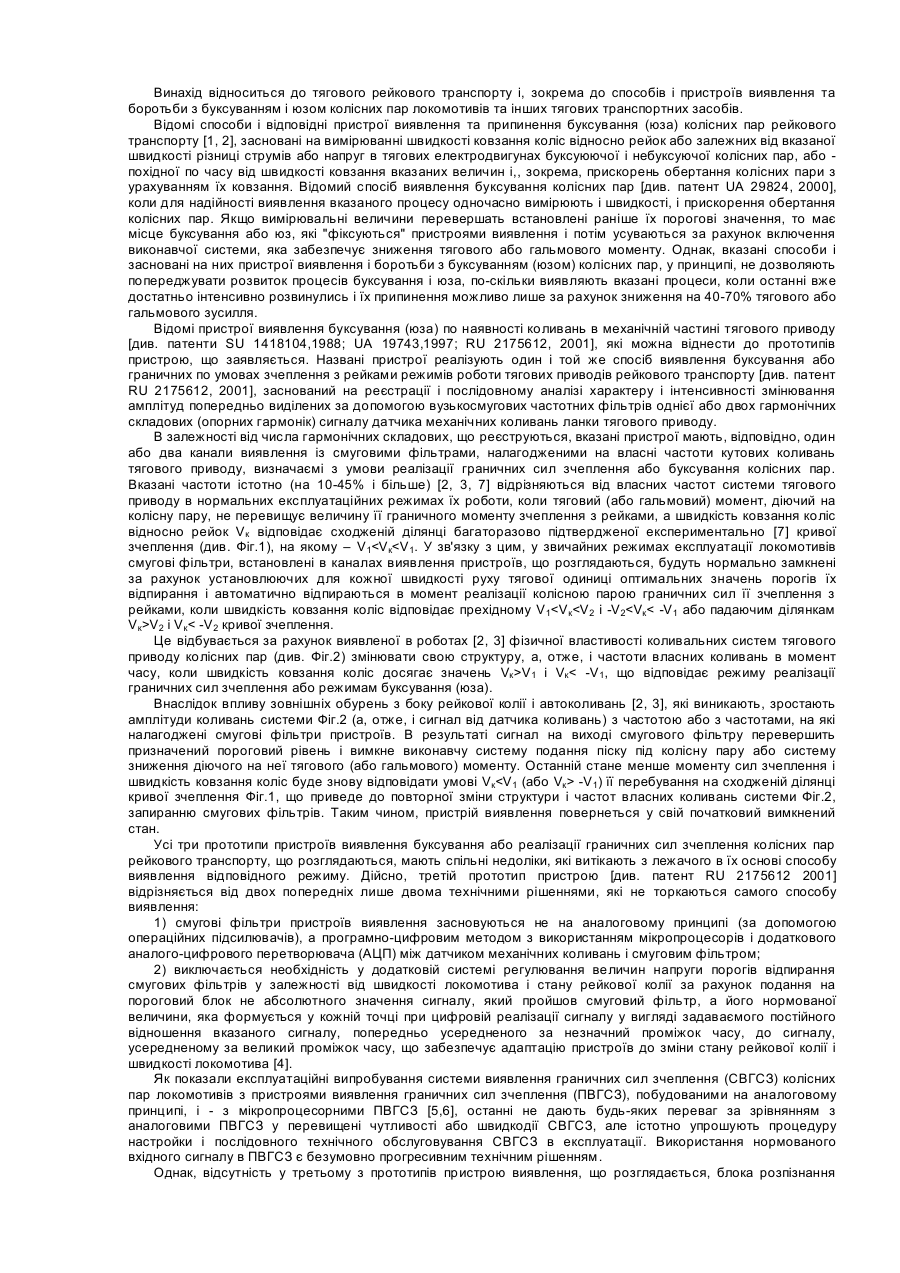
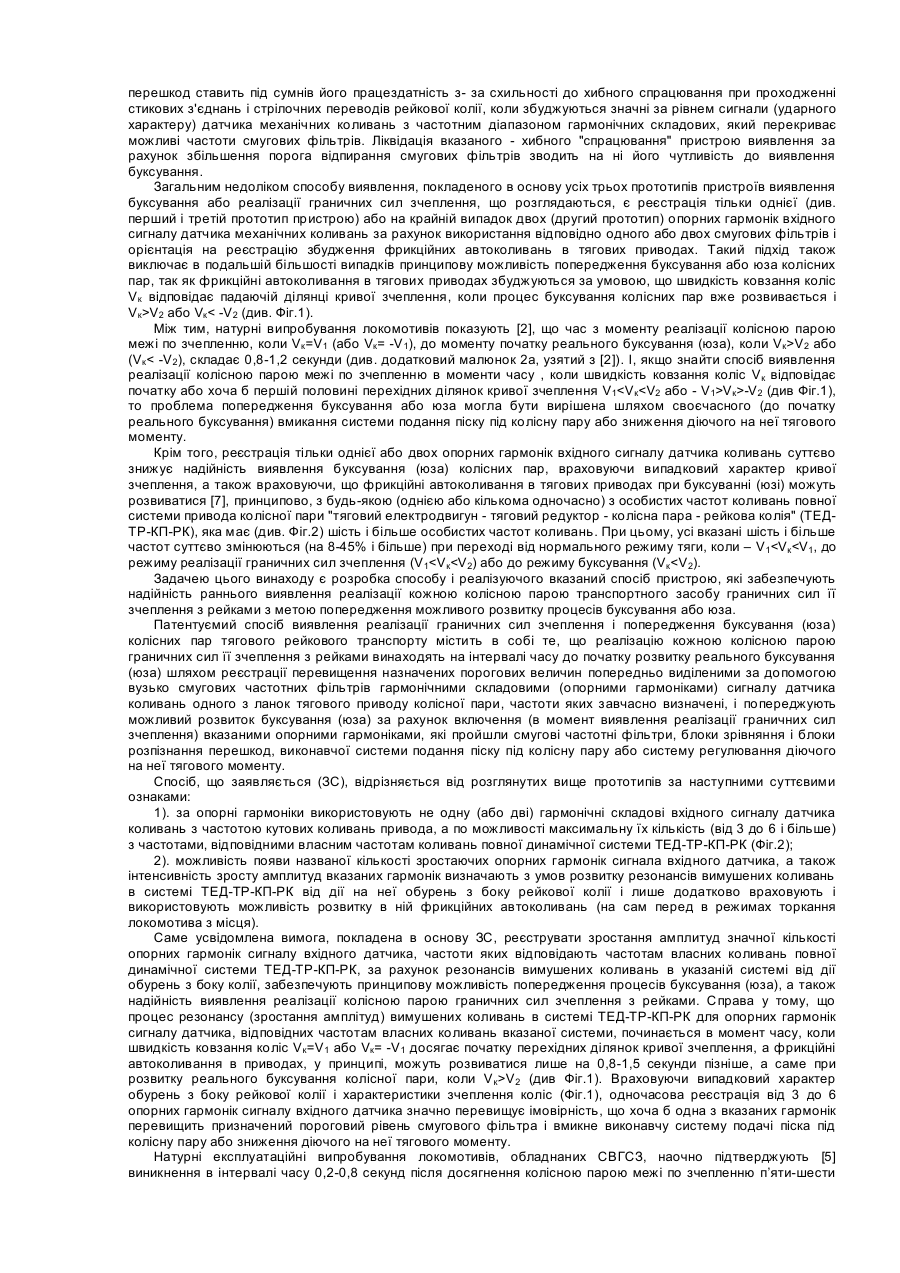
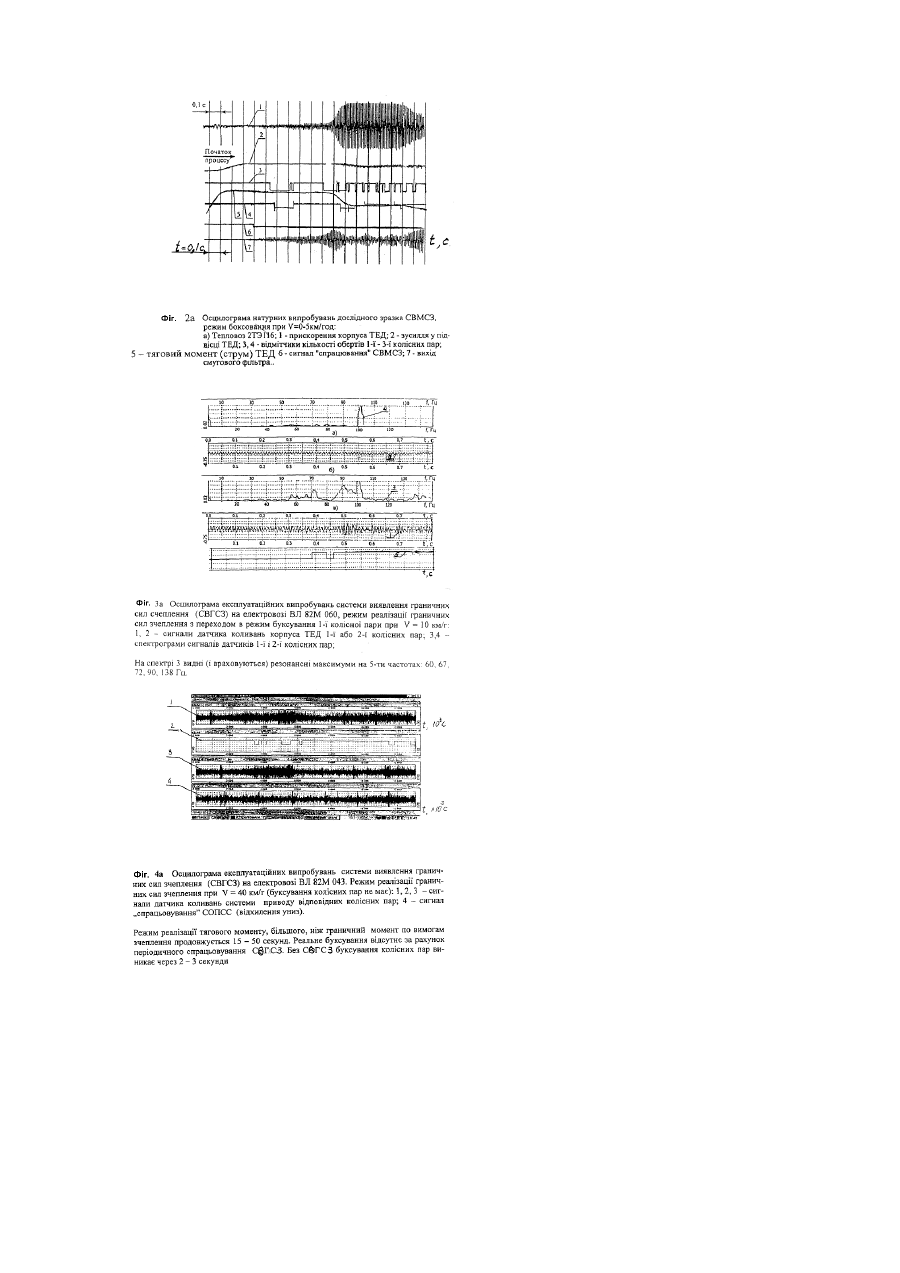
Винахід відноситься до тягового рейкового транспорту і, зокрема до способів і пристроїв виявлення та боротьби з буксуванням і юзом колісних пар локомотивів та інших тягових транспортних засобів. Відомі способи і відповідні пристрої виявлення та припинення буксування (юза) колісних пар рейкового транспорту [1, 2], засновані на вимірюванні швидкості ковзання коліс відносно рейок або залежних від вказаної швидкості різниці струмів або напруг в тягових електродвигунах буксуюючої і небуксуючої колісних пар, або похідної по часу від швидкості ковзання вказаних величин і,, зокрема, прискорень обертання колісних пари з урахуванням їх ковзання. Відомий спосіб виявлення буксування колісних пар [див. патент UA 29824, 2000], коли для надійності виявлення вказаного процесу одночасно вимірюють і швидкості, і прискорення обертання колісних пар. Якщо вимірювальні величини перевершать встановлені раніше їх порогові значення, то має місце буксування або юз, які "фіксуються" пристроями виявлення і потім усуваються за рахунок включення виконавчої системи, яка забезпечує зниження тягового або гальмового моменту. Однак, вказані способи і засновані на них пристрої виявлення і боротьби з буксуванням (юзом) колісних пар, у принципі, не дозволяють попереджувати розвиток процесів буксування і юза, по-скільки виявляють вказані процеси, коли останні вже достатньо інтенсивно розвинулись і їх припинення можливо лише за рахунок зниження на 40-70% тягового або гальмового зусилля. Відомі пристрої виявлення буксування (юза) по наявності коливань в механічній частині тягового приводу [див. патенти SU 1418104,1988; UA 19743,1997; RU 2175612, 2001], які можна віднести до прототипів пристрою, що заявляється. Названі пристрої реалізують один і той же спосіб виявлення буксування або граничних по умовах зчеплення з рейками режимів роботи тягових приводів рейкового транспорту [див. патент RU 2175612, 2001], заснований на реєстрації і послідовному аналізі характеру і інтенсивності змінювання амплітуд попередньо виділених за допомогою вузькосмугових частотних фільтрів однієї або двох гармонічних складових (опорних гармонік) сигналу датчика механічних коливань ланки тягового приводу. В залежності від числа гармонічних складових, що реєструються, вказані пристрої мають, відповідно, один або два канали виявлення із смуговими фільтрами, налагодженими на власні частоти кутових коливань тягового приводу, визначаємі з умови реалізації граничних сил зчеплення або буксування колісних пар. Вказані частоти істотно (на 10-45% і більше) [2, 3, 7] відрізняються від власних частот системи тягового приводу в нормальних експлуатаційних режимах їх роботи, коли тяговий (або гальмовий) момент, діючий на колісну пару, не перевищує величину її граничного моменту зчеплення з рейками, а швидкість ковзання коліс відносно рейок Vк відповідає сходженій ділянці багаторазово підтвердженої експериментально [7] кривої зчеплення (див. Фіг.1), на якому – V1V2 або VкV2 або (Vк< -V2), складає 0,8-1,2 секунди (див. додатковий малюнок 2а, узятий з [2]). І, якщо знайти спосіб виявлення реалізації колісною парою межі по зчепленню в моменти часу , коли швидкість ковзання коліс Vк відповідає початку або хоча б першій половині перехідних ділянок кривої зчеплення V1-V2 (див Фіг.1), то проблема попередження буксування або юза могла бути вирішена шляхом своєчасного (до початку реального буксування) вмикання системи подання піску під колісну пару або зниження діючого на неї тягового моменту. Крім того, реєстрація тільки однієї або двох опорних гармонік вхідного сигналу датчика коливань суттєво знижує надійність виявлення буксування (юза) колісних пар, враховуючи випадковий характер кривої зчеплення, а також враховуючи, що фрикційні автоколивання в тягових приводах при буксуванні (юзі) можуть розвиватися [7], принципово, з будь-якою (однією або кількома одночасно) з особистих частот коливань повної системи привода колісної пари "тяговий електродвигун - тяговий редуктор - колісна пара - рейкова колія" (ТЕДТР-КП-РК), яка має (див. Фіг.2) шість і більше особистих частот коливань. При цьому, усі вказані шість і більше частот суттєво змінюються (на 8-45% і більше) при переході від нормального режиму тяги, коли – V1
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and device for identification of limit cohesive forces and prevention of slippage (skid) of wheel pairs of traction rail transport
Автори англійськоюPavlenko Albert Prokopovych, Pavlenko Anton Albertovych
Назва патенту російськоюСпособ и устройство выявления реализации предельных сил сцепления и предупреждения буксования (юза) колесных пар тягового рельсового транспорта
Автори російськоюПавленко Альберт Прокофьевич, Павленко Антон Альбертович
МПК / Мітки
МПК: B61C 15/00, B60L 3/10
Мітки: рейкового, зчеплення, юза, сіль, спосіб, пристрій, колісних, попередження, пар, тягового, транспорту, буксування, виявлення, граничних, реалізації
Код посилання
<a href="https://ua.patents.su/5-73692-sposib-i-pristrijj-viyavlennya-realizaci-granichnikh-sil-zcheplennya-ta-poperedzhennya-buksuvannya-yuza-kolisnikh-par-tyagovogo-rejjkovogo-transportu.html" target="_blank" rel="follow" title="База патентів України">Спосіб і пристрій виявлення реалізації граничних сил зчеплення та попередження буксування (юза) колісних пар тягового рейкового транспорту</a>
Пристрій для виявлення буксування чи юза колісних пар транспортного засобу
Номер патенту: 8782
Опубліковано: 15.08.2005
Автор: Шапран Євген Миколайович
МПК: B60L 3/10, G01P 15/16
Мітки: юза, транспортного, засобу, колісних, буксування, виявлення, пристрій, пар
Формула / Реферат:
Пристрій для виявлення буксування чи юза колісних пар транспортного засобу, що має для всіх ведучих колісних пар блоки розрахунку динамічного зусилля, кожен з яких містить датчик частоти обертання тягового двигуна, з'єднаний з одним із входів додаткового суматора, інший вхід якого підключений до виходу інтегратора, датчик струму якоря тягового двигуна, вихід якого з'єднаний з одним із входів блока множення, інший вхід якого через блок...
Пристрій виявлення буксування та юзу коліс рейкового транспортного засобу
Номер патенту: 19743
Опубліковано: 25.12.1997
Автори: Павленко Антон Альбертович, Клепіков Володимир Борисович, Павленко Альберт Прокопович, Кутовий Юрій Миколайович
МПК: B60L 3/10
Мітки: транспортного, засобу, юзу, пристрій, коліс, рейкового, виявлення, буксування
Формула / Реферат:
1. Устройство обнаружения буксования и юза колес рельсового транспортного средства, содержащее датчик колебаний механической части привода колесной пары и первый канал обнаружения буксования и юза, включающий последовательно соединенные первый полосовой фильтр с полоской пропускания нижних частот колебаний механической части привода колесной пары, первый выпрямитель, первый сглаживающий фильтр, первый пороговый элемент, и второй пороговый...
Пристрій для змащування гребенів колісних пар рейкового транспортного засобу

Номер патенту: 67211
Опубліковано: 15.06.2004
Автори: Бєлозьоров Євген Володимирович, Бєлозьорова Вікторія Володимирівна, Голубенко Олександр Леонідович, Вівденко Юрій Григорійович, Спірягін Максим Ігоревич
МПК: B61K 3/00
Мітки: рейкового, колісних, засобу, пар, змащування, транспортного, гребенів, пристрій
Формула / Реферат:
Пристрій для змащування гребенів колісних пар рейкового транспортного засобу, який містить резервуар з мастилом, масляний трубопровід, змащувальний елемент та запірно-регулюючий механізм, який відрізняється тим, що як резервуар з мастилом застосовано резервуар, розташований на осі колісної пари з можливістю створення відцентрової сили під час руху транспортного засобу для витиску рідкого мастила, як запірно-регулюючий механізм для мастила...
Підвіска тягового приводу рейкового транспортного засобу

Номер патенту: 11288
Опубліковано: 25.12.1996
Автор: Рахманов Микола Миколайович
МПК: B61C 9/00
Мітки: приводу, підвіска, тягового, рейкового, транспортного, засобу
Формула / Реферат:
Подвеска тягового привода рельсового транспортного средства, содержащая стержень с шаровой головкой, размещенной в полости, образованной конусными поверхностями внутри корпуса, расположенного на полке поперечной балки рамы тележки, нижний конец стержня соединен с рамой привода, с которой образована при помощи головки шарнирная связь с рамой тележки, отличающаяся тем, что шаровая головка снабжена центральным отверстием, через которое...
Спосіб передачі і виявлення шумоподібних кодових послідовностей та пристрій для його реалізації
Номер патенту: 59785
Опубліковано: 15.09.2003
Автори: Лозинський Василь Іванович, Погрібний Володимир Олександрович, Рожанківський Ігор Володимирович
МПК: H03M 3/00
Мітки: передачі, шумоподібних, кодових, реалізації, послідовностей, спосіб, виявлення, пристрій
Формула / Реферат:
1. Спосіб передачі і виявлення шумоподібних кодових послідовностей на основі знакової дельта-модуляції, в якому аналоговий сигнал перетворюють в знаковий дельта-код, який відрізняється тим, що додатково вхідну шумоподібну кодову послідовність перетворюють в аналоговий сигнал, згладжують його, підсилюють, передають каналом зв’язку, приймають і здійснюють цифрову узгоджену фільтрацію отриманого з аналогового сигналу знакового...
Попередній патент: Водогрійний котел
Наступний патент: Спосіб визначення інфекційного процесу після хірургічного лікування ендокардиту із застосуванням гіпертермії
Випадковий патент: Поглинаючий апарат залізничного транспортного засобу