Пристрій для визначення місцеположення рейкового транспорту
Формула / Реферат
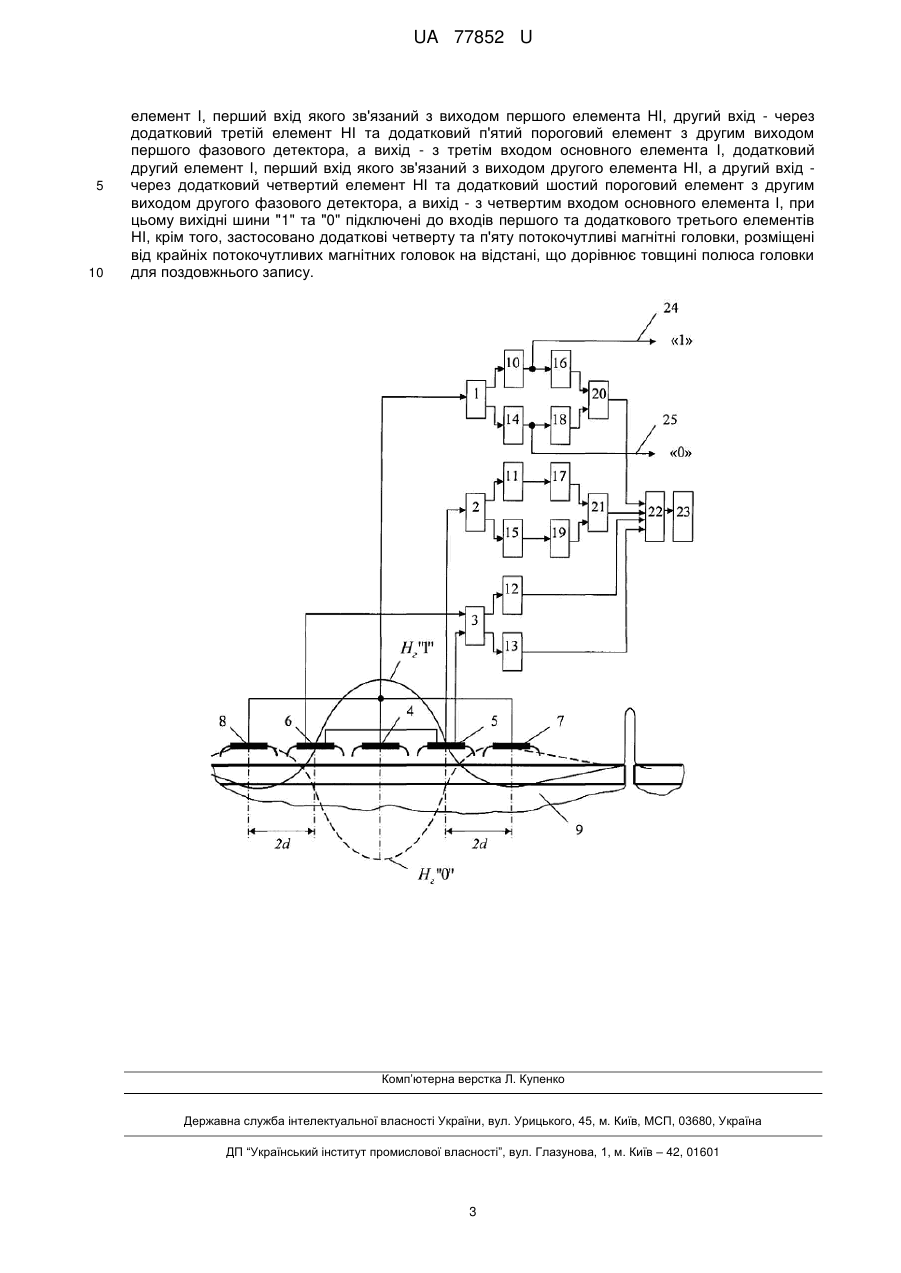
Пристрій для визначення місцеположення рейкового транспорту, що містить перший, другий та третій фазові детектори, входи яких з'єднані з виводами відповідно першої, другої та третьої потокочутливих магнітних головок, розташованих вздовж рейки, причому відстань між крайніми головками дорівнює ширині робочого зазору головки запису, а перша головка розміщена в центрі цього зазору, перший та другий порогові елементи, підключені до виходів відповідно першого та другого фазових детекторів та виходи яких з'єднані відповідно з першим та другим елементами НІ, елемент І, вихід якого підключений до входу індикатора, перший вхід елемента І зв'язаний з виходом третього порогового елемента, підключеного до першого виходу третього фазового детектора, а другий вхід - до четвертого порогового елемента, зв'язаного з другим виходом третього фазового детектора, з'єднаного з додатковим виводом другої потокочутливої магнітної головки, другий додатковий вивід якої підключений до додаткового виводу третьої потокочутливої магнітної головки, який відрізняється тим, що розміщено додатковий перший елемент І, перший вхід якого зв'язаний з виходом першого елемента НІ, другий вхід - через додатковий третій елемент НІ та додатковий п'ятий пороговий елемент з другим виходом першого фазового детектора, а вихід - з третім входом основного елемента І, додатковий другий елемент І, перший вхід якого зв'язаний з виходом другого елемента НІ, а другий вхід - через додатковий четвертий елемент НІ та додатковий шостий пороговий елемент з другим виходом другого фазового детектора, а вихід - з четвертим входом основного елемента І, при цьому вихідні шини "1" та "0" підключені до входів першого та додаткового третього елементів НІ, крім того, застосовано додаткові четверту та п'яту потокочутливі магнітні головки, розміщені від крайніх потокочутливих магнітних головок на відстані, що дорівнює товщині полюса головки для поздовжнього запису.
Текст
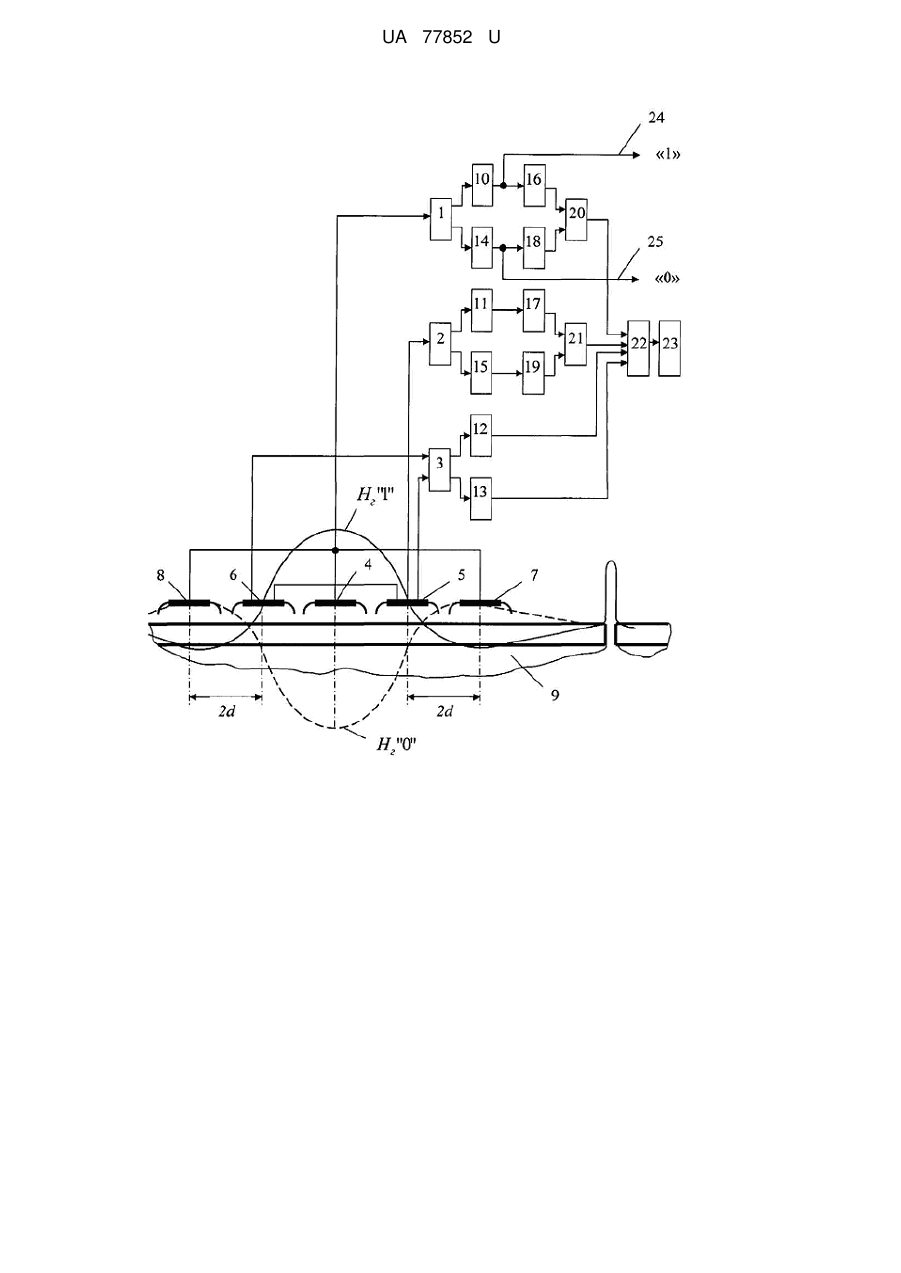
Реферат: UA 77852 U UA 77852 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до приладобудування і може бути використана у техніці магнітного запису на нестандартні магнітні носії. Відомо пристрій для визначення місцеположення рейкового транспорту, що містить перший, другий та третій фазові детектори, входи яких з'єднані з виводами відповідно першої, другої та третьої потокочутливих магнітних головок, розташованих вздовж рейки, причому відстань між крайніми головками дорівнює ширині робочого зазору головки запису, а перша головка розміщена в центрі цього зазору, перший та другий порогові елементи, підключені до виходів відповідно першого та другого фазових детекторів та виходи яких з'єднані відповідно з першим та другим елементами НІ, елемент І, вихід якого підключений до входу індикатора, перший вхід елемента І зв'язаний з виходом третього порогового елемента, підключеного до першого виходу третього фазового детектора, а другий вхід - до четвертого порогового елемента, зв'язаного з другим виходом третього фазового детектора, з'єднаного з додатковим виводом другої потокочутливої магнітної головки, другий додатковий вивід якої підключений до додаткового виводу третьої потокочутливої магнітної головки, додатковий перший елемент І, перший вхід якого зв'язаний з виходом першого елемента НІ, другий вхід - через додатковий третій елемент НІ та додатковий п'ятий пороговий елемент з другим виходом першого фазового детектора, а вихід -з третім входом основного елемента І, додатковий другий елемент І, перший вхід якого зв'язаний з виходом другого елемента НІ, а другий вхід - через додатковий четвертий елемент НІ та додатковий шостий пороговий елемент з другим виходом другого фазового детектора, а вихід - з четвертим входом основного елемента І, при цьому вихідні шини "1" та "0" підключені до входів першого та додаткового третього елементів НІ [Патент України № 64143, G06K 7/08, опубл. 25.10.2011, бюл. № 20]. Цей пристрій взятий як найближчий аналог. Недолік відомого пристрою полягає в тому, що через наявну кількість потокочутливих магнітних головок він має недостатню чутливість та точність роботи. В основу корисної моделі поставлено задачу вдосконалення пристрою для визначення місцеположення рейкового транспорту шляхом того, що пристрій забезпечено додатковими четвертою та п'ятою потокочутливими магнітними головками, розміщеними від крайніх потокочутливих магнітних головок на відстані, що дорівнює товщині полюса головки для поздовжнього запису. Це забезпечить суттєве підвищення чутливості пристрою та точності його роботи. Поставлена задача вирішується тим, що у пристрої для визначення місцеположення рейкового транспорту, що містить перший, другий та третій фазові детектори, входи яких з'єднані з виводами відповідно першої, другої та третьої потокочутливих магнітних головок, розташованих вздовж рейки, причому відстань між крайніми головками дорівнює ширині робочого зазору головки запису, а перша головка розміщена в центрі цього зазору, перший та другий порогові елементи, підключені до виходів відповідно першого та другого фазових детекторів та виходи яких з'єднані відповідно з першим та другим елементами НІ, елемент І, вихід якого підключений до входу індикатора, перший вхід елемента І зв'язаний з виходом третього порогового елемента, підключеного до першого виходу третього фазового детектора, а другий вхід - до четвертого порогового елемента, зв'язаного з другим виходом третього фазового детектора, з'єднаного з додатковим виводом другої потокочутливої магнітної головки, другий додатковий вивід якої підключений до додаткового виводу третьої потокочутливої магнітної головки, згідно з корисною моделлю, розміщено додатковий перший елемент І, перший вхід якого зв'язаний з виходом першого елемента НІ, другий вхід -через додатковий третій елемент НІ та додатковий п'ятий пороговий елемент з другим виходом першого фазового детектора, а вихід - з третім входом основного елемента І, додатковий другий елемент І, перший вхід якого зв'язаний з виходом другого елемента НІ, а другий вхід - через додатковий четвертий елемент НІ та додатковий шостий пороговий елемент з другим виходом другого фазового детектора, а вихід - з четвертим входом основного елемента І, при цьому вихідні шини "1" та "0" підключені до входів першого та додаткового третього елементів НІ, крім того згідно з корисною моделлю, застосовано додаткові четверту та п'яту потокочутливі магнітні головки, розміщені від крайніх потокочутливих магнітних головок на відстані, що дорівнює товщині полюса головки для поздовжнього запису. Суть корисної моделі пояснюється кресленням, де зображено пристрій для визначення місцеположення рейкового транспорту, що містить перший, другий та третій фазові детектори 1, 2 та 3, першу, другу, третю, четверту та п'яту потокочутливі магнітні головки 4, 5, 6, 7 та 8, розташовані вздовж магнітного носія 9, причому відстань між осями другої та третьої потокочутливих магнітних головок 5 та 6 дорівнює ширині робочого зазору головки для поздовжнього запису (не показана), перша потокочутлива магнітна головка 4 розміщена в центрі цього зазору, а четверта та п'ята потокочутливі магнітні головки 7 та 8 зміщені відповідно 1 UA 77852 U 5 10 15 20 25 30 35 40 від другої та третьої потокочутливих магнітних головок 5 та 6 на відстань, що дорівнює товщині Id полюса головки для поздовжнього запису, перший-шостий порогові елементи 10-15, першийчетвертий елементи НІ 16-19, елементи І 20-22, індикатор 23, вихідні шини "1" 24 та "0" 25. Пристрій для визначення місцеположення рейкового транспорту працює таким чином. Попередньо головкою для поздовжнього запису (не показана) на магнітний носій 1 наносяться магнітні мітки різної полярності. При цьому амплітуда та довжина мітки передбачається значно більшими ніж амплітуда та довжина дефектів магнітного носія. За умови обслуговуванні об'єкта першого типу, який ідентифікується, наприклад, як "1", при русі рейкової транспортної одиниці, на якій розташований блок потокочутливих магнітних головок 4-8, у момент збігу центра блока головок з центром магнітної мітки на виходах потокочутливих магнітних головок 4-6, які зчитують горизонтальну складову напруженості магнітного поля Hг "1", з'являються сигнали позитивної полярності, що перевищують пороги спрацювання порогових елементів, а на виходах додаткових потокочутливих магнітних головок 7, 8 - сигнали негативної полярності, які сумуються з сигналом першої потокочутливої магнітної головки 4. Вихідні обмотки другої та третьої потокочутливих магнітних головок 5 та 6 з'єднані між собою зустрічно послідовно та при рівності сигналів зазначених головок вхідний сигнал фазового детектора 3 дорівнює нулю, при цьому третій та четвертий порогові елементи 12 та 13, зв'язані виходами з першим та другим входами основного елемента І 22, не спрацьовують. Сигнали з вихідних обмоток першої та другої потокочутливих магнітних головок 4 та 5 передаються через перший та другий фазові детектори 1 та 2 на входи першого та другого порогових елементів 10 та 11, у подальшому сигнали через перший та другий елементи НІ 16 та 17, а також через перший та другий елементи І 20 та 21 передаються на дозволяльні третій та четвертий входи елемента І 22. Тільки при збігу центра блока потокочутливих магнітних головок 4-8 з центром магнітної мітки, але не з центром магнітного поля перешкоди, яке має значно меншу довжину, елемент І 22 виробляє сигнал, який надходить на індикатор 23, а на вихідній шині 24 з'являється сигнал "1". За умови обслуговуванні об'єкта іншого типу, який ідентифікується, наприклад, як "0", при русі транспортної одиниці на виходах потокочутливих магнітних головок 4-6, які зчитують горизонтальну складову напруженості магнітного поля Hг "0", з'являються сигнали негативної полярності, що перевищують пороги спрацювання порогових елементів, а на виходах додаткових потокочутливих магнітних головок 7, 8 - сигнали позитивної полярності, які підсумовуються з сигналом першої потокочутливої магнітної головки 4. Сигнали з вихідних обмоток першої та другої потокочутливих магнітних головок 4 та 5 передаються через перший та другий фазові детектори 1 та 2 на входи третього та четвертого порогових елементів 14 та 15, у подальшому сигнали через третій та четвертий елементи НІ 18 та 19, а також через перший та другий елементи І 20 та 21 передаються на дозволяльні третій та четвертий входи елемента І 22. При збігу центра блока потокочутливих магнітних головок 4-8 з центром магнітної мітки елемент І 22 виробляє сигнал, який надходить на індикатор 23, а на вихідній шині 25 з'являється сигнал "0". Пропонована корисна модель забезпечить високу перешкодозахищеність від локальних дефектів рейок і завдяки зчитуванню додаткових пелюсток горизонтальної складової напруженості магнітного поля мітки дозволить підвищити чутливість та точність роботи пристрою. 45 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 50 55 Пристрій для визначення місцеположення рейкового транспорту, що містить перший, другий та третій фазові детектори, входи яких з'єднані з виводами відповідно першої, другої та третьої потокочутливих магнітних головок, розташованих вздовж рейки, причому відстань між крайніми головками дорівнює ширині робочого зазору головки запису, а перша головка розміщена в центрі цього зазору, перший та другий порогові елементи, підключені до виходів відповідно першого та другого фазових детекторів та виходи яких з'єднані відповідно з першим та другим елементами НІ, елемент І, вихід якого підключений до входу індикатора, перший вхід елемента І зв'язаний з виходом третього порогового елемента, підключеного до першого виходу третього фазового детектора, а другий вхід - до четвертого порогового елемента, зв'язаного з другим виходом третього фазового детектора, з'єднаного з додатковим виводом другої потокочутливої магнітної головки, другий додатковий вивід якої підключений до додаткового виводу третьої потокочутливої магнітної головки, який відрізняється тим, що розміщено додатковий перший 2 UA 77852 U 5 10 елемент І, перший вхід якого зв'язаний з виходом першого елемента НІ, другий вхід - через додатковий третій елемент НІ та додатковий п'ятий пороговий елемент з другим виходом першого фазового детектора, а вихід - з третім входом основного елемента І, додатковий другий елемент І, перший вхід якого зв'язаний з виходом другого елемента НІ, а другий вхід через додатковий четвертий елемент НІ та додатковий шостий пороговий елемент з другим виходом другого фазового детектора, а вихід - з четвертим входом основного елемента І, при цьому вихідні шини "1" та "0" підключені до входів першого та додаткового третього елементів НІ, крім того, застосовано додаткові четверту та п'яту потокочутливі магнітні головки, розміщені від крайніх потокочутливих магнітних головок на відстані, що дорівнює товщині полюса головки для поздовжнього запису. Комп’ютерна верстка Л. Купенко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for the detection of rail transport location
Автори англійськоюSmyrnyi Mykhailo Fedorovych
Назва патенту російськоюУстройство для определения местоположения рельсового транспорта
Автори російськоюСмирный Михаил Федорович
МПК / Мітки
МПК: G06K 7/08
Мітки: визначення, пристрій, рейкового, місцеположення, транспорту
Код посилання
<a href="https://ua.patents.su/5-77852-pristrijj-dlya-viznachennya-miscepolozhennya-rejjkovogo-transportu.html" target="_blank" rel="follow" title="База патентів України">Пристрій для визначення місцеположення рейкового транспорту</a>
Пристрій для визначення місцеположення рейкового транспорту
Номер патенту: 64143
Опубліковано: 25.10.2011
Автор: Смірний Михайло Федорович
МПК: G06K 7/08
Мітки: рейкового, місцеположення, пристрій, визначення, транспорту
Формула / Реферат:
Пристрій для визначення місцеположення рейкового транспорту, що містить перший, другий та третій фазові детектори, входи яких з'єднані з виводами відповідно першої, другої та третьої потокочутливих магнітних головок, розташованих вздовж рейки, причому відстань між крайніми головками дорівнює ширині робочого зазору головки запису, а перша головка розміщена в центрі цього зазору, перший та другий порогові елементи, які підключені до виходів...
Пристрій для визначення місцеположення рейкового транспорту

Номер патенту: 64153
Опубліковано: 25.10.2011
Автор: Смірний Михайло Федорович
МПК: G06K 7/08
Мітки: рейкового, пристрій, місцеположення, транспорту, визначення
Формула / Реферат:
Пристрій для визначення місцеположення рейкового транспорту, що містить перший, другий та третій фазові детектори, входи яких з'єднані з виводами відповідно першої, другої та третьої потокочутливих магнітних головок, розташованих вздовж рейки, причому відстань між крайніми головками дорівнює ширині робочого зазору головки запису, а перша головка розміщена в центрі цього зазору, перший та другий порогові елементи, які підключені до виходів...
Пристрій для визначення місцеположення рейкового транспорту
Номер патенту: 64154
Опубліковано: 25.10.2011
Автор: Смірний Михайло Федорович
МПК: G06K 7/08
Мітки: місцеположення, визначення, пристрій, рейкового, транспорту
Формула / Реферат:
Пристрій для визначення місцеположення рейкового транспорту, що містить перший, другий та третій фазові детектори, входи яких з'єднані з виводами відповідно першої, другої та третьої потокочутливих магнітних головок, розташованих вздовж рейки, причому відстань між крайніми головками дорівнює ширині робочого зазору головки запису, а перша головка розміщена в центрі цього зазору, перший та другий порогові елементи, які підключені до виходів...
Пристрій для визначення місцеположення рейкового транспорту
Номер патенту: 77033
Опубліковано: 25.01.2013
Автор: Смірний Михайло Федорович
МПК: G06K 7/08
Мітки: пристрій, місцеположення, рейкового, транспорту, визначення
Формула / Реферат:
Пристрій для визначення місцеположення рейкового транспорту, що містить перший, другий та третій фазові детектори, входи яких з'єднані з виводами відповідно першої, другої та третьої потокочутливих магнітних головок, розташованих вздовж рейки, причому відстань між крайніми головками дорівнює ширині робочого зазору головки запису, а перша головка розміщена в центрі цього зазору, перший та другий порогові елементи, підключені до виходів...
Пристрій для визначення місцеположення рейкового транспорту
Номер патенту: 75784
Опубліковано: 10.12.2012
Автор: Смірний Михайло Федорович
МПК: G06K 7/08
Мітки: визначення, місцеположення, пристрій, рейкового, транспорту
Формула / Реферат:
Пристрій для визначення місцеположення рейкового транспорту, що містить перший, другий та третій фазові детектори, входи яких з'єднані з виводами відповідно першої, другої та третьої потокочутливих магнітних головок, розташованих вздовж рейки, причому відстань між крайніми головками дорівнює ширині робочого зазору головки запису, а перша головка розміщена в центрі цього зазору, перший та другий порогові елементи, що підключені до виходів...
Попередній патент: Спосіб лікування пацієнтів з псевдокістами підшлункової залози
Наступний патент: Пристрій для контролю виробів, армованих металевими линвами
Випадковий патент: Суміш для виготовлення ливарних стержнів і форм