Спосіб протидії активним поляризаційним перешкодам на фіксованій площині поляризації
Номер патенту: 79603
Опубліковано: 25.04.2013
Автори: Чекед Ігор Володимирович, Власко Микола Петрович, Манішин Олександр Вікторович, АНДРІЄВСЬКИЙ АНДРІЙ ПЕТРОВИЧ, Іванов Володимир Львович, Водчиць Олександр Григорович, Семененко Олег Михайлович, Добровольський Юзеф Броніславович, Потапов Григорій Михайлович
Формула / Реферат
Спосіб протидії активним поляризаційним перешкодам на фіксованій площині поляризації, за яким задають рухомий повітряний об'єкт, випромінюють радіолокаційний сигнал у повітряний простір в бік заданого рухомого повітряного об'єкта, приймають відбитий радіолокаційний сигнал від заданого рухомого повітряного об'єкта, спостерігають за заданим рухомим повітряним об'єктом, який відрізняється тим, що від заданого рухомого повітряного об'єкта приймають відбитий радіолокаційний сигнал та сигнал перешкоди з ортогональним вектором поляризації відносно вектору поляризації випроміненого сигналу, змінюють вектор поляризації при прийомі сигналів на 3-10° відносно випроміненого сигналу, приймають сигнал на зміненій поляризації відносно поляризації випроміненого сигналу, утримують в полі зору та супроводжують заданий рухомий повітряний об'єкт в умовах дії перешкоди.
Текст
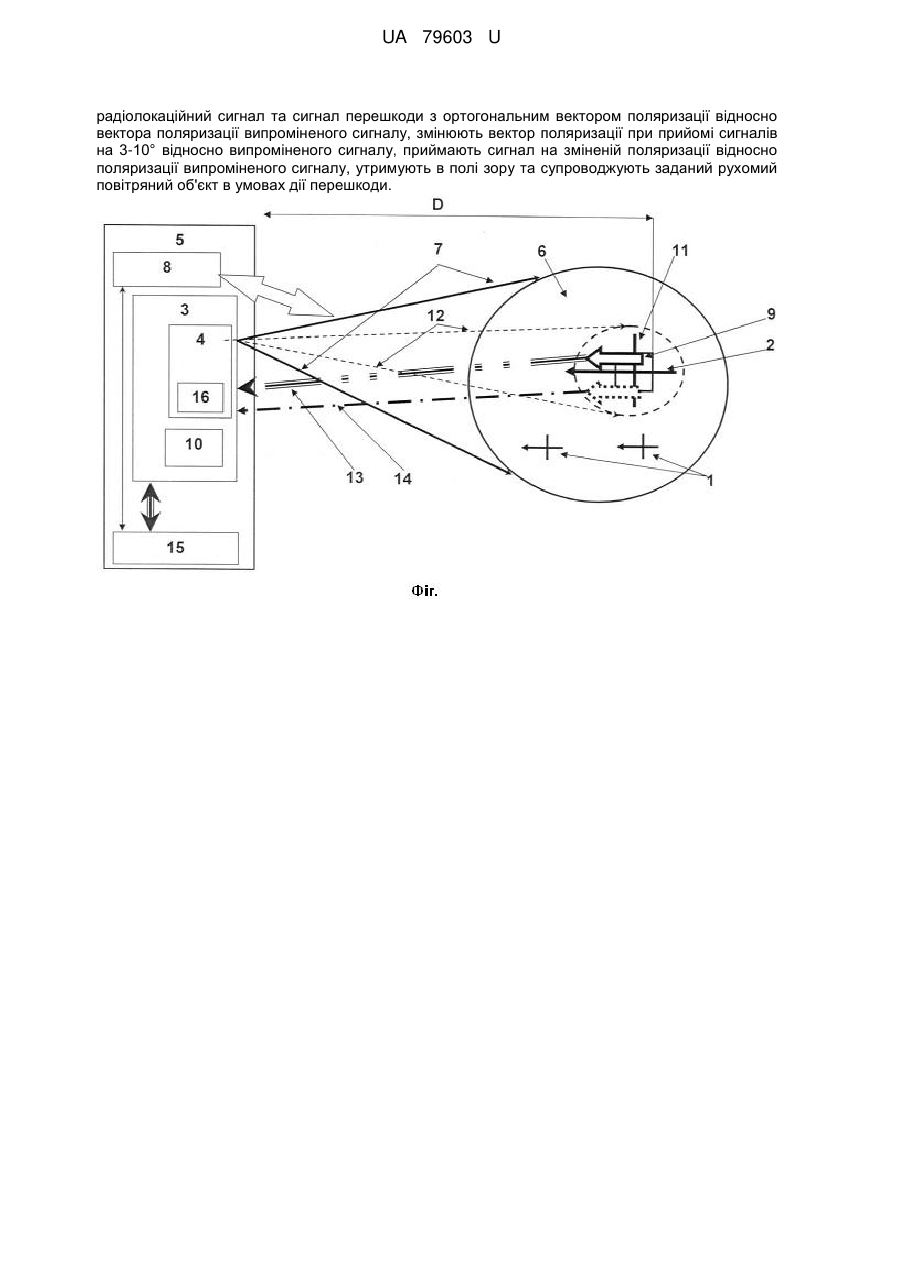
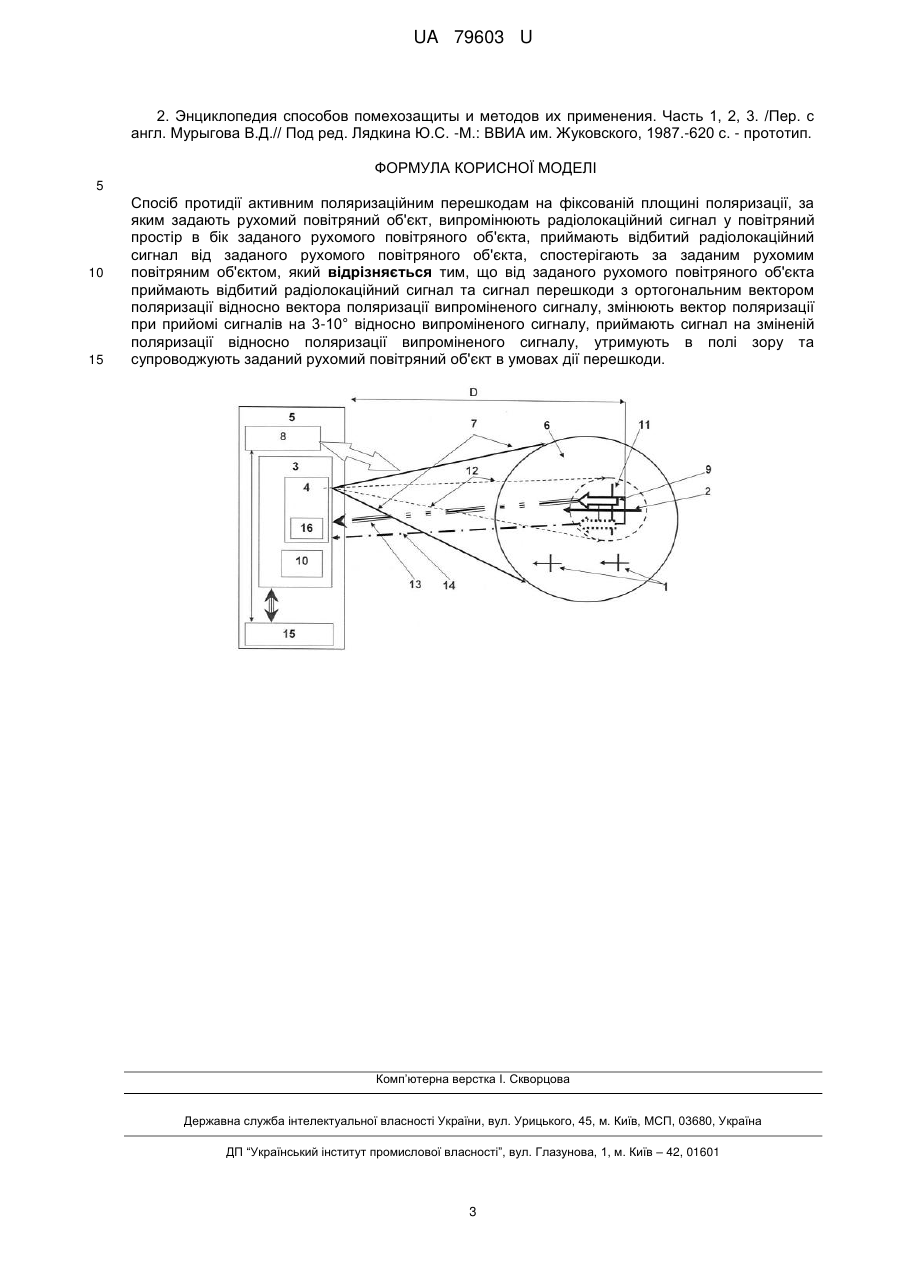
Реферат: Спосіб протидії активним поляризаційним перешкодам на фіксованій площині поляризації, за яким задають рухомий повітряний об'єкт, випромінюють радіолокаційний сигнал у повітряний простір у бік заданого рухомого повітряного об'єкта, приймають відбитий радіолокаційний сигнал від заданого рухомого повітряного об'єкта, спостерігають за заданим рухомим повітряним об'єктом. Від заданого рухомого повітряного об'єкта приймають відбитий UA 79603 U (12) UA 79603 U радіолокаційний сигнал та сигнал перешкоди з ортогональним вектором поляризації відносно вектора поляризації випроміненого сигналу, змінюють вектор поляризації при прийомі сигналів на 3-10° відносно випроміненого сигналу, приймають сигнал на зміненій поляризації відносно поляризації випроміненого сигналу, утримують в полі зору та супроводжують заданий рухомий повітряний об'єкт в умовах дії перешкоди. UA 79603 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до радіолокації, а саме до способів протидії активним поляризаційним перешкодам. Спосіб протидії активним поляризаційним перешкодам на фіксованій площині поляризації доцільно застосовувати під час польотів на рухомих повітряних засобах в особливих умовах. Спосіб зміни порядку приймання відбитих радіолокаційних сигналів від інших рухомих повітряних об'єктів з метою протидії активним поляризаційним перешкодам на фіксованій площині поляризації доцільно застосовувати під час польотів на рухомих повітряних об'єктах в особливих умовах. Відомий спосіб протидії підсиленому сигналу поляризаційної перешкоди на фіксованій площині поляризації, за яким встановлюють неактивний засіб протидії поляризаційній перешкоді, приймають сигнал поляризаційної перешкоди, уникають дії поляризаційної перешкоди на строго ортогональній поляризації відносно корисного сигналу /1, 2/. Недоліками відомого способу протидії підсиленому сигналу поляризаційної перешкоди є те, що при достатній потужності сигналу поляризаційної перешкоди або в разі не збігання площини поляризації на 0,5-1,5 градуса поляризаційна перешкода зриває процес супроводження. Наслідком реалізації способу є зрив процесу супроводження рухомого повітряного об'єкту та поновлення його пошуку в повітряному просторі. Найбільш близьким технологічним рішенням, як за суттю, так і за задачею, що вирішується, яке вибрано за найближчий аналог (прототип), є спосіб протидії активним поляризаційним перешкодам на фіксованій площині поляризації, за яким задають рухомий повітряний об'єкт, випромінюють у повітряний простір корисний радіолокаційний сигнал від повітряного рухомого засобу з поляризаційним фільтром у бік заданого іншого рухомого повітряного об'єкта, спостерігають за заданим іншим рухомим повітряним об'єктом /2/. Недоліками відомого способу протидії активним поляризаційним перешкодам на фіксованій площині поляризації, який обрано за найближчий аналог (прототип), є те, що спосіб не забезпечує повного уникнення дії перешкоди, а лише забезпечує її послаблення. Під час реалізації способу існує ймовірність зриву процесу спостереження, утримання в полі зору та супроводження заданого іншого рухомого повітряного об'єкта. В основу корисної моделі поставлено задачу за рахунок впровадження додаткових технологічних операцій приймати відбитий від заданого повітряного об'єкта сигнал на площині поляризації, яка на 3-10° відрізняється від площини випроміненого сигналу разом з посиленим радіолокаційним сигналом перешкоди із ортогональним вектором поляризації відносно випроміненого, супроводжувати заданий рухомий повітряний об'єкт в умовах створення ним поляризаційної перешкоди на фіксованій площині поляризації, завдяки чому створюються умови для супроводження заданого повітряного об'єкта за сигналом поляризаційної перешкоди. Поставлена задача вирішується тим, що в способі протидії активним поляризаційним перешкодам на фіксованій площині поляризації, за яким задають рухомий повітряний об'єкт, випромінюють радіолокаційний сигнал у повітряний простір у бік заданого рухомого повітряного об'єкта, приймають відбитий радіолокаційний сигнал від заданого рухомого повітряного об'єкта, спостерігають за заданим рухомим повітряним об'єктом, згідно з корисною моделлю, від заданого рухомого повітряного об'єкта приймають відбитий радіолокаційний сигнал та сигнал перешкоди з ортогональним вектором поляризації відносно вектору поляризації випроміненого сигналу, змінюють вектор поляризації при прийомі сигналів на 3-10° відносно випроміненого сигналу, приймають сигнал на зміненій поляризації відносно поляризації випроміненого сигналу, утримують в полі зору та супроводжують заданий рухомий повітряний об'єкт в умовах дії перешкоди. Додаткове змінювання вектору поляризації на 3-10° відносно випроміненого корисного сигналу за рахунок додаткового застосування цифрового пристрою управління прийомом радіолокаційного сигналу відбитого від рухомого повітряного об'єкта, як засобу змінювання площини поляризації під час прийому відбитого радіолокаційного сигналу від вибраного для спостереження та заданого повітряного рухомого об'єкту, забезпечує протидію засобу створення активних перешкод та унеможливлює вплив активної поляризаційної перешкоди на фіксованій площині поляризації від засобу створення активних перешкод, встановленому на заданому рухомому повітряному об'єкті. Послідовність виконання технологічних операцій, які становлять суть способу протидії активним поляризаційним перешкодам на фіксованій площині поляризації, показано на кресленні. Спосіб зміни порядку приймання відбитих радіолокаційних сигналів (що заявляється) ґрунтується на змінюванні поляризації в процесі прийому відбитих радіолокаційних сигналів від 1 UA 79603 U 5 10 15 20 25 30 35 40 45 50 55 60 вибраного та заданого для спостереження рухомого повітряного об'єкту реалізується наступним чином (див. кресл.). Для виявлення із рухомих повітряних об'єктів 1 і 2 за допомогою бортової радіолокаційної станції 3 з неактивним засобом 4 захисту від активних поляризаційних перешкод, яку встановлено на рухомому повітряному засобі 5, в повітряний простір 6 випромінюють радіолокаційний сигнал 7, показаний на кресленні одинарними суцільними стрілками (лініями). За допомогою засобу 8 візуального спостереження візуально визначають рухомі повітряні об'єкти 1 і 2. Вибирають, наприклад, рухомий повітряний об'єкт 2 з засобом 9 створення активних поляризаційних перешкод на фіксованій площині поляризації. За допомогою засобу 10 ручного (автоматичного) фокусування радіолокаційного сигналу серед рухомих повітряних об'єктів 1 і 2 вибирають рухомий повітряний об'єкт 2, тобто на об'єкт 2 випромінюється безперервний сфокусований радіолокаційний сигнал 12 спостереження за ним 2. (позначений переривчастою лінією (стрілкою) з крапкою) та задають рухомий повітряний об'єкт 2, на якому діє засіб 9 створення активних перешкод. Засіб прийому радіолокаційної станції автоматично приймає відбитий радіолокаційний сигнал 13 (позначений подвійною переривчастою лінією (стрілкою) з двома крапками). Через деякий час засіб 9 створення активних перешкод вибраного заданого рухомого повітряного об'єкта 2 автоматично випромінює сигнал 14 з поляризаційною перешкодою на фіксованій площині поляризації (який позначено одинарною переривчастою лінією (стрілкою) з одною крапкою). Цей сигнал 14 зриває радіолокаційне спостереження за вибраним заданим рухомим повітряним об'єктом 2. За допомогою неактивного засобу 4 захисту радіолокаційної станції 3 від активної поляризаційної перешкоди 14 на фіксованій площині поляризації уникають або послаблюють дію цієї перешкоди 14 на радіолокаційну станцію, яка має ймовірність зриву супроводження 0,95 об'єкту 2 у разі її прямої дії. Додатково за відбитим радіолокаційним сигналом 13 від заданого рухомого повітряного об'єкту 2 з засобом 9 створення активних перешкод визначають відстань D до вибраного заданого рухомого повітряного об'єкта 2 з засобом 9 створення активних перешкод. Залежно від відстані D до вибраного заданого рухомого повітряного об'єкту 2, за допомогою додатково встановленого цифрового пристрою 15 управління зміною поляризації під час функціонування засобу 16 прийому відбитого радіолокаційного сигналу та прийому сигналу перешкоди 14 змінюється поляризація їх прийому. Вона відрізняється на величину 3-10 градуси від величини поляризації прийнятого сигналу. За такої зміни поляризації під час прийому незначно втрачається потужність відбитого сигналу 13, але поляризаційна перешкода 14 не зриває супроводження за заданим повітряним об'єктом 2 та додатково виникає можливість роботи бортової радіолокаційної станції 3 за сигналом перешкоди (постановник перешкод - заданий рухомий повітряний об'єкт 2 з засобом 9 створення активних перешкод буде себе "підсвічувати"). Максимальна дальність роботи бортової радіолокаційної станції 3 за такої зміни поляризації зменшиться на 2-3 %, ймовірність зриву супроводження перешкодою на фіксованій площині поляризації практично знижується до нульових значень, поляризаційна перешкода 14 не спроможна змінити роботу бортової радіолокаційної станції 3, чим протидіють засобу 9 створення активних перешкод, встановленому на заданому рухомому повітряному об'єкті 2. Застосування способу зміни поляризації на максимальних відстанях роботи бортової радіолокаційної станції неможливо в разі відсутності засобу 9 створення активних перешкод заданого повітряного рухомого об'єкту 2, максимальна відстань спостереження буде зменшуватися від десятків метрів до 1-3 кілометрів від максимального значення (цю відстань заданий повітряний рухомий об'єкт 2, долає за 1-4 секунди), але в разі одночасної роботи засобу 9 створення активних перешкод в режимі створення поляризаційної перешкоди на фіксованій площині поляризації потужність сигналів 13 та 14 на вході засобу 16 прийому відбитого радіолокаційного сигналу та прийому сигналу перешкоди 14 бортової радіолокаційної станції 3 збільшується практично в 2-3 рази, що надає можливість супроводжувати заданий рухомий повітряний об'єкт 2 за його сигналом перешкоди 14. Спосіб зміни площини поляризації під час прийому сигналу відбитого від заданого повітряного рухомого об'єкту, за яким ведеться безперервне спостереження, дозволяє уникнути дії ефективної поляризаційної перешкоди на фіксованій площині поляризації, чим протидіє засобу створення активних перешкод встановленому на заданому рухомому повітряному об'єкті 2, що уможливить вплив на бортову радіолокаційну станцію, яка веде безперервне спостереження за даним об'єктом. Джерела інформації: 1. Василевич Л.Ф. Радиоэлектронное подавление. - К.: КВВАИУ, 1989.-243 С. - аналог. 2 UA 79603 U 2. Энциклопедия способов помехозащиты и методов их применения. Часть 1, 2, 3. /Пер. с англ. Мурыгова В.Д.// Под ред. Лядкина Ю.С. -М.: ВВИА им. Жуковского, 1987.-620 с. - прототип. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 15 Спосіб протидії активним поляризаційним перешкодам на фіксованій площині поляризації, за яким задають рухомий повітряний об'єкт, випромінюють радіолокаційний сигнал у повітряний простір в бік заданого рухомого повітряного об'єкта, приймають відбитий радіолокаційний сигнал від заданого рухомого повітряного об'єкта, спостерігають за заданим рухомим повітряним об'єктом, який відрізняється тим, що від заданого рухомого повітряного об'єкта приймають відбитий радіолокаційний сигнал та сигнал перешкоди з ортогональним вектором поляризації відносно вектора поляризації випроміненого сигналу, змінюють вектор поляризації при прийомі сигналів на 3-10° відносно випроміненого сигналу, приймають сигнал на зміненій поляризації відносно поляризації випроміненого сигналу, утримують в полі зору та супроводжують заданий рухомий повітряний об'єкт в умовах дії перешкоди. Комп’ютерна верстка І. Скворцова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for counteraction against active polarization interferences at fixed polarization plane
Автори англійськоюSemenenko Oleh Mykhailovych, Andrievskyi Andrii Petrovych, Vodchyts Oleksandr Hryhorovych, Dobrovolskyi Yuzef Bronislavovych, Potapov Hryhorii Mykhailovych, Cheked Ihor Volodymyrovych, Ivanov Volodymyhr Lvovych, Vlasko Mykola Petrovych, Manishyn Oleksandr Viktorovych
Назва патенту російськоюСпособ противодействия активным поляризационным препятствиям на фиксированной плоскости поляризации
Автори російськоюСемененко Олег Михайлович, Андриевский Андрей Петрович, Водчиц Александр Григорьевич, Добровольский Юзеф Брониславович, Потапов Григорий Михайлович, Чекед Игорь Владимирович, Иванов Владимир Львович, Власко Николай Петрович, Манишин Александр Викторович
МПК / Мітки
МПК: G01S 7/537
Мітки: площині, протидії, активним, спосіб, перешкодам, поляризаційним, фіксованій, поляризації
Код посилання
<a href="https://ua.patents.su/5-79603-sposib-protidi-aktivnim-polyarizacijjnim-pereshkodam-na-fiksovanijj-ploshhini-polyarizaci.html" target="_blank" rel="follow" title="База патентів України">Спосіб протидії активним поляризаційним перешкодам на фіксованій площині поляризації</a>
Спосіб подачі радіолокаційних сигналів протидії активним перешкодам
Номер патенту: 72365
Опубліковано: 10.08.2012
Автори: Водчиць Олександр Григорович, Добровольський Юзеф Броніславович, Власко Олександр Миколайович, АНДРІЄВСЬКИЙ АНДРІЙ ПЕТРОВИЧ, Семененко Олег Михайлович, Чекед Ігор Володимирович, Соломатін Дмитро Олександрович
МПК: G01S 7/537
Мітки: протидії, перешкодам, радіолокаційних, активним, спосіб, сигналів, подачі
Формула / Реферат:
Спосіб подачі радіолокаційних сигналів протидії активним перешкодам, за яким випромінюють радіолокаційний сигнал в повітряний простір, виявляють інші рухомі повітряні об'єкти, визначають інші задані рухомі повітряні об'єкти, визначають відстань до іншого заданого рухомого повітряного об'єкта з засобом створення активних перешкод та швидкість його руху залежно від заданого кутового розміру направлення проміння радіолокаційного сигналу,...
Спосіб вимірювання кута повороту площини поляризації світлового променя в оптично активних мутних середовищах і пристрій для його реалізації
Номер патенту: 92836
Опубліковано: 10.12.2010
Автори: Краснов Володимир Миколайович, Кожохіна Олена Володимирівна, Тронько Володимир Дмитрович, Скрипець Андрій Васильович, Асанов Марлен Мустафайович
МПК: G01N 21/21
Мітки: світлового, реалізації, пристрій, оптично, поляризації, вимірювання, середовищах, повороту, площині, променя, спосіб, кута, мутних, активних
Формула / Реферат:
1. Спосіб вимірювання кута обертання площини поляризації світла в мутних активних середовищах, при якому досліджуване середовище розміщують на шляху монохроматичного пучка світла між поляризатором та роздільником світлового променя на два, пройшовши який світлові промені потрапляють на аналізатори, орієнтовані під кутами ±a відносно площини найбільшого пропускання поляризатора, потім інтенсивність обох променів перетворюється фотоприймачами...
Спосіб реєстрації кута повороту площини поляризації світлового потоку в мутних активних середовищах
Номер патенту: 92837
Опубліковано: 10.12.2010
Автори: Асанов Марлен Мустафайович, Тронько Володимир Дмитрович, Скрипець Андрій Васильович
МПК: G01N 21/21
Мітки: потоку, реєстрації, спосіб, поляризації, мутних, площині, світлового, повороту, кута, середовищах, активних
Формула / Реферат:
Спосіб реєстрації кута повороту площини поляризації світлового потоку, що проходить через мутне активне середовище, у якому використовують джерело випромінювання, фарадеївський модулятор, фотоприймач і систему, що підсилює електричний сигнал, α кювету з досліджуваним зразком розміщують у монохроматичному пучку світла між двома поляризаторами, який відрізняється тим, що попередньо вимірюють ступінь поляризації світла зразком та за...
Спосіб вимірювання параметрів поляризації неоднорідних анізотропних об’єктів
Номер патенту: 22605
Опубліковано: 25.04.2007
Автори: Оберемок Євген Анатолійович, Клімов Олександр Сергійович, Тужанський Станіслав Євгенович, Савенков Сергій Миколайович
МПК: G01J 4/00
Мітки: неоднорідних, спосіб, вимірювання, об'єктів, параметрів, анізотропних, поляризації
Формула / Реферат:
Спосіб вимірювання параметрів поляризації неоднорідних анізотропних об'єктів, що включає фокусування зображення від цих об'єктів, гармонічну модуляцію його поляризованої компоненти, перетворення модуляції поляризованої компоненти у модуляцію по інтенсивності, перетворення інтенсивності випромінювання у електричний сигнал за допомогою фотоприймача із наступним синхронним детектуванням гармонійних складових електричного сигналу шляхом...
Магнітооптичний обертач площини поляризації світла
Номер патенту: 70833
Опубліковано: 25.06.2012
Автори: Бержанський Володимир Наумович, Долгов Олександр Іванович, Басиладзе Георгій Діомідович
Мітки: обертач, світла, поляризації, магнітооптичний, площині
Формула / Реферат:
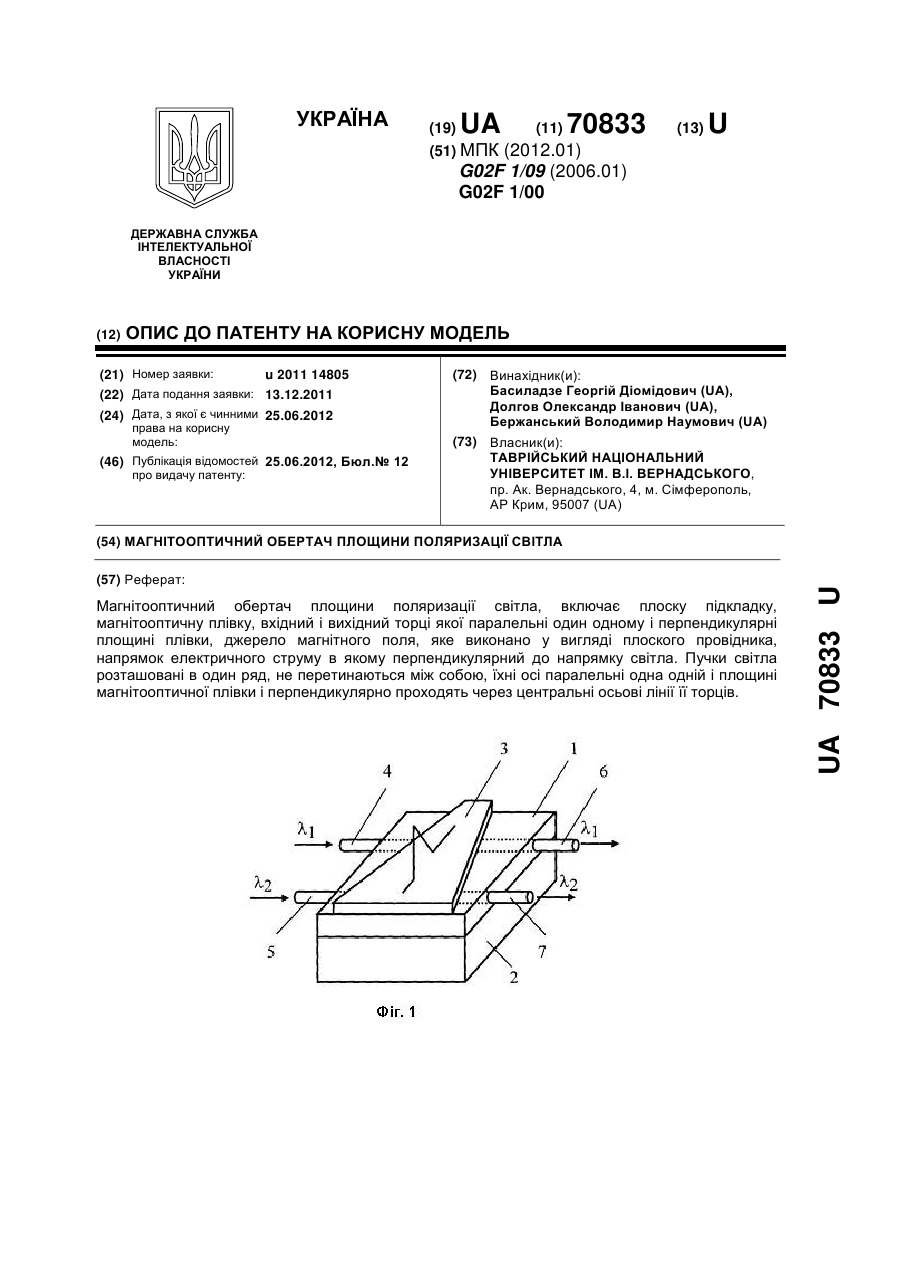
Магнітооптичний обертач площини поляризації світла, що включає плоску підкладку, на якій розташована магнітооптична плівка, вхідний і вихідний торці якої паралельні один одному і перпендикулярні площини плівки, а також джерело магнітного поля, яке виконано у вигляді плоского провідника розташованого на поверхні магнітооптичної плівки, напрямок електричного струму в якому перпендикулярний до напрямку світла, який відрізняється тим, що пучки...
Попередній патент: Екструдер
Наступний патент: Морська стаціонарна платформа з відтяжками
Випадковий патент: Пристрій для експрес-визначення теплоти згоряння природного газу