Спосіб перевірки якості функціонування електричних рульових приводів і автопілотів керованих снарядів і пристрій для його реалізації
Номер патенту: 79769
Опубліковано: 25.07.2007
Автори: Кузьмін В'ячеслав Павлович, Удалов Олександр Сергійович, Семенов Леонід Антонович, Коростельов Олег Петрович, Шепелєв Юрій Іванович, Антонюк Олександр Ігоревич, Косовенко Євген Вікторович, Яковенко Петро Олексійович, Доценко Борис Іванович
Формула / Реферат
1. Спосіб перевірки якості функціонування електричних рульових приводів і автопілотів керованих снарядів, що включає математичне моделювання в реальному масштабі часу просторового руху літального апарата, формування сигналів керування і подачу їх на автопілот, знімання сигналів з рульового приводу і подачу їх у моделюючу програму, який відрізняється тим, що якість функціонування рульових приводів і автопілотів оцінюють за величиною промаху, при цьому розряд батареї бортового живлення імітують зміною напруги живлення приводу, а вплив діючого на привід аеродинамічного шарнірного навантаження імітують еквівалентним обмеженням струму споживання приводу чи зміною опору якірного ланцюга.
2. Пристрій для перевірки якості функціонування електричних рульових приводів і автопілотів керованих снарядів, що містить ПЕОМ із блоком інтерфейсним, багатоканальний багатофункціональний програмувальний генератор сигналів, багатоканальний аналого-цифровий перетворювач, блок формування, прийому й обробки дискретних сигналів, універсальне джерело живлення, який відрізняється тим, що в ньому для імітації реальних умов функціонування введене програмувальне джерело живлення, обмежник струму, програмувальна резисторна матриця і формувач інформаційного поля, при цьому входи програмувального джерела живлення, обмежника струму, програмувальної резисторної матриці і формувача інформаційного поля підключені до виходу блока інтерфейсного, вихід формувача інформаційного поля підключений до входу автопілота, а вихід програмувального джерела живлення через обмежник струму чи програмувальну резисторну матрицю підключений до входу силового живлення приводів.
Текст
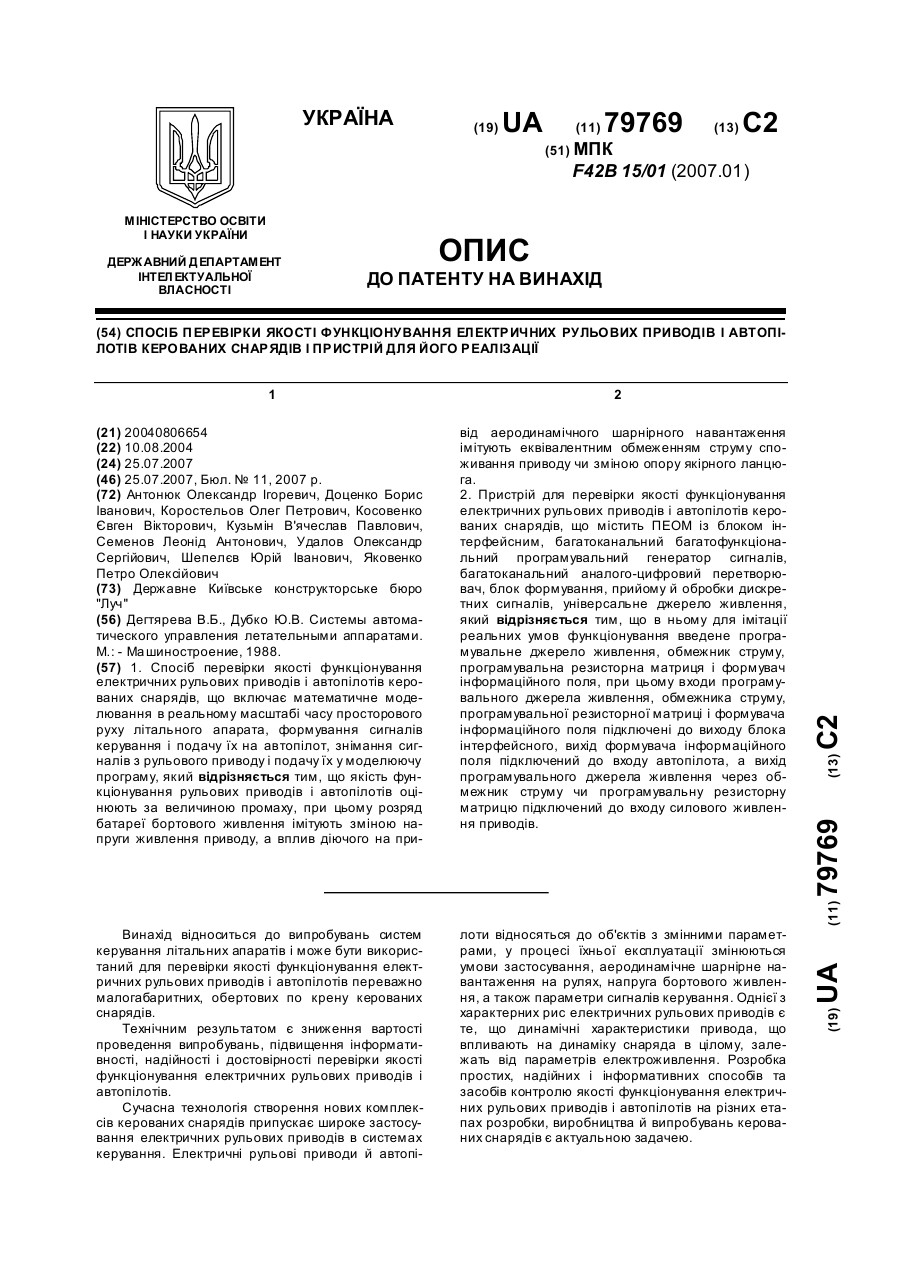
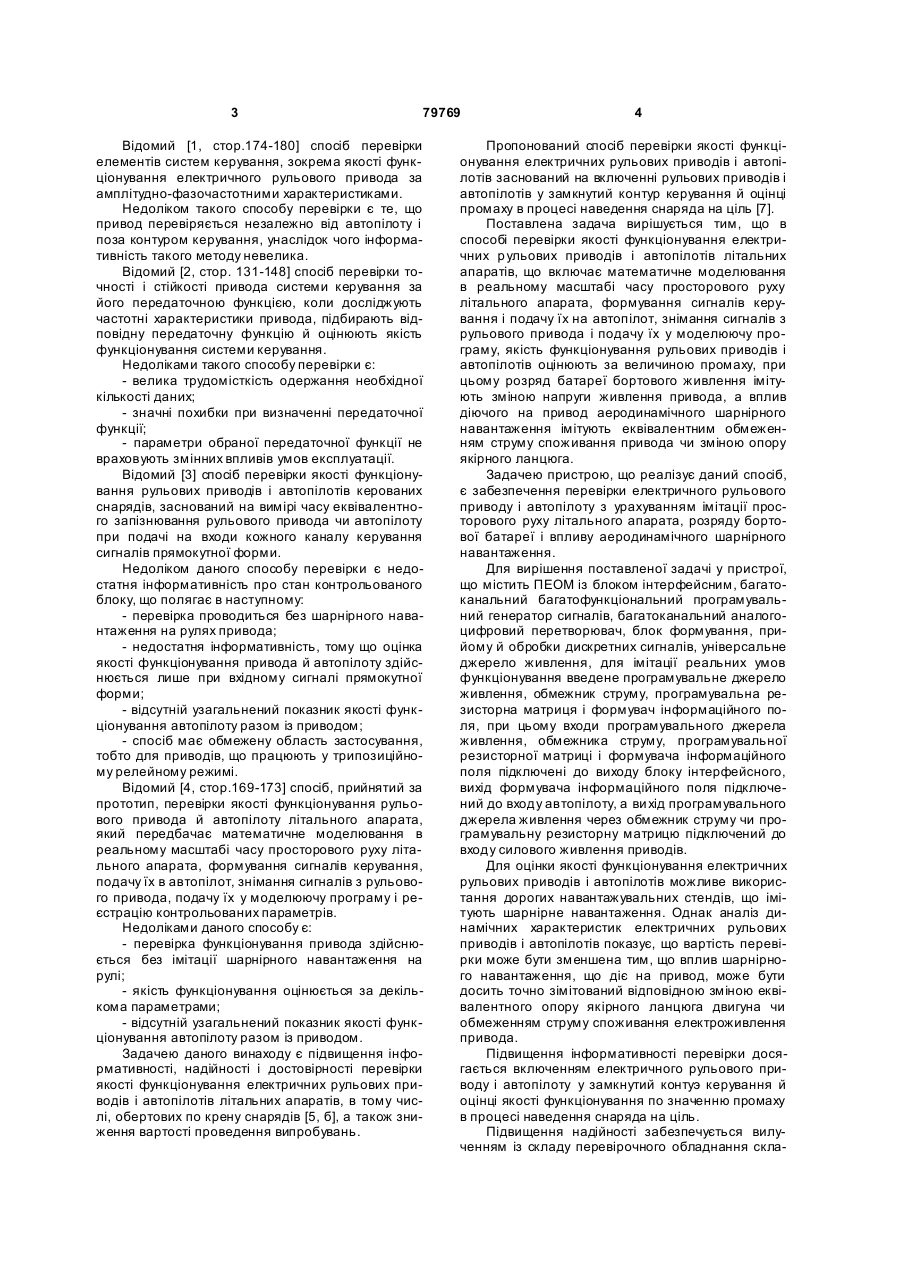
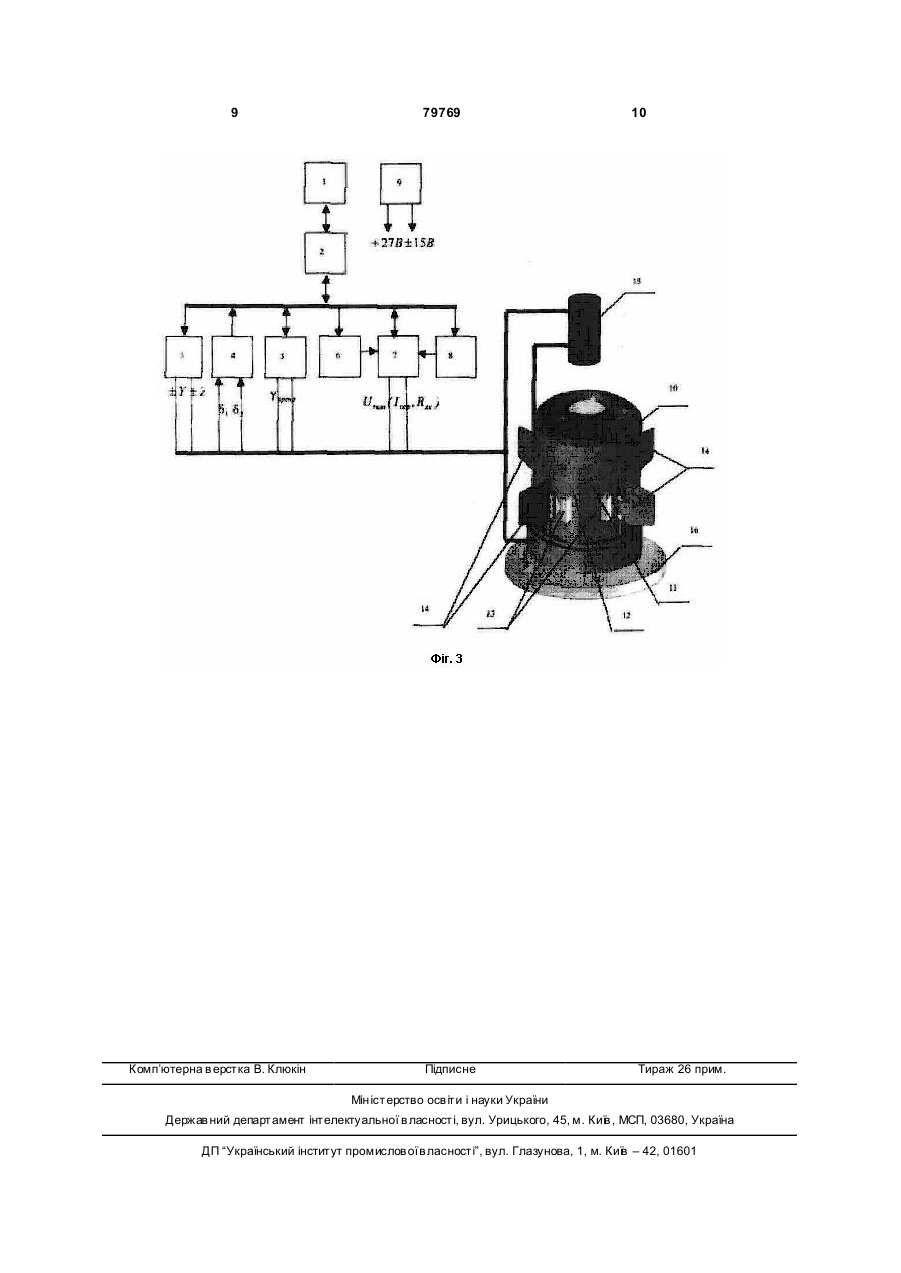
1. Спосіб перевірки якості функціонування електричних рульових приводів і автопілотів керованих снарядів, що включає математичне моделювання в реальному масштабі часу просторового руху літального апарата, формування сигналів керування і подачу їх на автопілот, знімання сигналів з рульового приводу і подачу їх у моделюючу програму, який відрізняється тим, що якість функціонування рульових приводів і автопілотів оцінюють за величиною промаху, при цьому розряд батареї бортового живлення імітують зміною напруги живлення приводу, а вплив діючого на при C2 2 79769 1 3 79769 Відомий [1, стор.174-180] спосіб перевірки елементів систем керування, зокрема якості функціонування електричного рульового привода за амплітудно-фазочастотними характеристиками. Недоліком такого способу перевірки є те, що привод перевіряється незалежно від автопілоту і поза контуром керування, унаслідок чого інформативність такого методу невелика. Відомий [2, стор. 131-148] спосіб перевірки точності і стійкості привода системи керування за його передаточною функцією, коли досліджують частотні характеристики привода, підбирають відповідну передаточну функцію й оцінюють якість функціонування системи керування. Недоліками такого способу перевірки є: - велика трудомісткість одержання необхідної кількості даних; - значні похибки при визначенні передаточної функції; - параметри обраної передаточної функції не враховують змінних впливів умов експлуатації. Відомий [3] спосіб перевірки якості функціонування рульових приводів і автопілотів керованих снарядів, заснований на вимірі часу еквівалентного запізнювання рульового привода чи автопілоту при подачі на входи кожного каналу керування сигналів прямокутної форми. Недоліком даного способу перевірки є недостатня інформативність про стан контрольованого блоку, що полягає в наступному: - перевірка проводиться без шарнірного навантаження на рулях привода; - недостатня інформативність, тому що оцінка якості функціонування привода й автопілоту здійснюється лише при вхідному сигналі прямокутної форми; - відсутній узагальнений показник якості функціонування автопілоту разом із приводом; - спосіб має обмежену область застосування, тобто для приводів, що працюють у трипозиційному релейному режимі. Відомий [4, стор.169-173] спосіб, прийнятий за прототип, перевірки якості функціонування рульового привода й автопілоту літального апарата, який передбачає математичне моделювання в реальному масштабі часу просторового руху літального апарата, формування сигналів керування, подачу їх в автопілот, знімання сигналів з рульового привода, подачу їх у моделюючу програму і реєстрацію контрольованих параметрів. Недоліками даного способу є: - перевірка функціонування привода здійснюється без імітації шарнірного навантаження на рулі; - якість функціонування оцінюється за декількома параметрами; - відсутній узагальнений показник якості функціонування автопілоту разом із приводом. Задачею даного винаходу є підвищення інформативності, надійності і достовірності перевірки якості функціонування електричних рульових приводів і автопілотів літальних апаратів, в тому числі, обертових по крену снарядів [5, б], а також зниження вартості проведення випробувань. 4 Пропонований спосіб перевірки якості функціонування електричних рульових приводів і автопілотів заснований на включенні рульових приводів і автопілотів у замкнутий контур керування й оцінці промаху в процесі наведення снаряда на ціль [7]. Поставлена задача вирішується тим, що в способі перевірки якості функціонування електричних р ульових приводів і автопілотів літальних апаратів, що включає математичне моделювання в реальному масштабі часу просторового руху літального апарата, формування сигналів керування і подачу їх на автопілот, знімання сигналів з рульового привода і подачу їх у моделюючу програму, якість функціонування рульових приводів і автопілотів оцінюють за величиною промаху, при цьому розряд батареї бортового живлення імітують зміною напруги живлення привода, а вплив діючого на привод аеродинамічного шарнірного навантаження імітують еквівалентним обмеженням струму споживання привода чи зміною опору якірного ланцюга. Задачею пристрою, що реалізує даний спосіб, є забезпечення перевірки електричного рульового приводу і автопілоту з урахуванням імітації просторового руху літального апарата, розряду бортової батареї і впливу аеродинамічного шарнірного навантаження. Для вирішення поставленої задачі у пристрої, що містить ПЕОМ із блоком інтерфейсним, багатоканальний багатофункціональний програмувальний генератор сигналів, багатоканальний аналогоцифровий перетворювач, блок формування, прийому й обробки дискретних сигналів, універсальне джерело живлення, для імітації реальних умов функціонування введене програмувальне джерело живлення, обмежник струму, програмувальна резисторна матриця і формувач інформаційного поля, при цьому входи програмувального джерела живлення, обмежника струму, програмувальної резисторної матриці і формувача інформаційного поля підключені до виходу блоку інтерфейсного, вихід формувача інформаційного поля підключений до входу автопілоту, а ви хід програмувального джерела живлення через обмежник струму чи програмувальну резисторну матрицю підключений до входу силового живлення приводів. Для оцінки якості функціонування електричних рульових приводів і автопілотів можливе використання дорогих навантажувальних стендів, що імітують шарнірне навантаження. Однак аналіз динамічних характеристик електричних рульових приводів і автопілотів показує, що вартість перевірки може бути зменшена тим, що вплив шарнірного навантаження, що діє на привод, може бути досить точно зімітований відповідною зміною еквівалентного опору якірного ланцюга двигуна чи обмеженням струму споживання електроживлення привода. Підвищення інформативності перевірки досягається включенням електричного рульового приводу і автопілоту у замкнутий контуэ керування й оцінці якості функціонування по значенню промаху в процесі наведення снаряда на ціль. Підвищення надійності забезпечується вилученням із складу перевірочного обладнання скла 5 79769 дних і малонадійних навантажувальних стендів, застосуванням програмних методів керування і використанням надійного апаратного та програмного забезпечення. Висока достовірність перевірки, як міра довіри до отриманих результатів, забезпечується тим, що використання програмних засобів дозволяє проводити комплексну перевірку якості функціонування електричних рульових приводів і автопілотів в автоматичному режимі, без впливу оператора, згідно з програмою. На Фіг.1 приведено графік залежності впливу зміни опору Rя якірного ланцюга двигуна одного з приводів, еквівалентної відповідному впливу шарнірного аеродинамічного навантаження Кш на динамічні характеристики реального привода. На Фіг.2 приведено графік залежності впливу зміні обмеження струму Іо джерела силового живлення одного з приводів, еквівалентної відповідному впливу шарнірного аеродинамічного навантаження Кш на динамічні характеристики привода. Таким чином, при перевірці якості функціонування електричних рульових приводів і автопілотів в умовах різного аеродинамічного шарнірного навантаження і змінних характеристик джерела живлення не використовуються дорогі навантажувальні стенди, а програмне задається зміна напруги живлення, що відповідає розряду бортової батареї, а перемінне аеродинамічне шарнірне навантаження імітується еквівалентною зміною опору якірного ланцюга двигуна привода чи обмеженням струму споживання привода. Спосіб перевірки реалізується пристроєм модулем контрольно-діагностичним (МКД), структурна схема якого приведена на Фіг.3. Запропонований пристрій - МКД містить у собі програмне й апаратне забезпечення. До складу програмного забезпечення МКД входить стандартне програмне забезпечення персональної ЕОМ і моделююча програма. Моделююча програма складається з наступних процедур: 1) процедура завдання початкових умов стрільби (координати цілі, температура навколишнього середовища, режим стрілянини - без чи з перевищенням ); 2) процедура аеродинаміки і розрахунку аеродинамічних сил і моментів; 3) процедури інтерфейсу, що здійснюють керування й обмін інформацією між ПЕОМ і обслуговуючими пристроями; 4) процедура обчислень правих частин інтегруючи х рівнянь, що забезпечує розрахунок параметрів просторового руху центра мас снаряда і його обертання відносно центра мас; 5) процедура перетворення координат; 6) процедура моделі атмосфери; 7) процедура імітації обертання снаряда і моделі гіророзкладача команд керування; 8) процедура моделі інформаційного поля; 9) процедура розрахунку відхилень центра мас снаряда від центра променя інформаційного поля і значень промаху; 10) процедура вибору методу інтегрування; 11) процедура завдання обмеження струму споживання; 6 12) процедура завдання опору якірного ланцю га; 13) процедура моделі тяги двигуна; 14) процедура завдання зовнішніх збурень. Програма функціонує в реальному масштабі часу, частота зміни вхідної і вихідної інформації 1000Гц, метод інтегрування диференціальних рівнянь - Рунге-Кутта 4-го порядку. Вхідними сигналами моделюючої програми є цифрові коди сигналів з потенціометрів зворотного зв'язку привода, а вихідними - цифрові коди відхилень центра мас снаряда відносно центра інформаційного поля і поточного кута крену. Апаратне забезпечення MКД- містить: ПЕОМ 1; блок інтерфейсний 2; багатоканальний багатофункціональний програмувальний генератор сигналів 3; багатоканальний аналого-цифровий перетворювач 4; блок формування, прийому й обробки дискретних сигналів 5; програмувальне джерело живлення 7 з обмежником струму 6 і програмувальною резисторною матрицею 8; універсальне джерело електроживлення 9 і формувач інформаційного поля 15. Пристрій (Фіг.3) працює таким чином. Автопілотний блок 11 і привод 12 з розкритими рулями 14 встановлюється і кріпиться на підставці 16 (елементи кріплення через їхню непринциповість на Фіг.3 не показані). Відповідно до початкових умов пуску задаються координати центра інформаційного поля і координати цілі, а керуюча ПЕОМ 1 розраховує просторове положення снаряда в інформаційному полі, визначає відхилення центра мас снаряда відносної центра інформаційного поля і через інтерфейсний блок 2 формує сигнали керування, що надходять на формувач інформаційного полю 15. Світловий сигнал, промодульований відповідною частотою, надходить на фотоприймальний пристрій 10, на виході якого формуються цифрові сигнали, пропорційні відхиленням центра мас снаряда від центра інформаційного поля в горизонтальній і вертикальній площинах і надходять на входи +-Y і +- Z автопілоту 11. На автопілот 11 також надходить сигнал із блоку формування, прийому й обробки дискретних сигналів 5, що імітує обертання снаряда по крену. На виходах автопілоту 11 виробляються керуючі цифрові сигнали, що у багатоканальному багатофункціональному генераторі сигналів 3 перетворюються у відповідні рівні напруги і надходять на аналогові входи привода 12, викликаючи відхилення рулів 14. Ви хідні сигнали з датчиків зворотного зв'язку 13 привода 12, перетворені в цифрові коди в багатоканальному аналого-цифровому перетворювачі 4, надходять у моделюючу програму ПЕОМ 1, де розраховуються поточні відхилення центра мас снаряда від центра інформаційного поля, замикаючи тим самим контур керування. Програмувальне джерело живлення 7 формує напругу силового живлення, що враховує розрядку бортової батареї в польоті. Відповідно до зміни швидкості польоту розраховується аеродинамічний шарнірної момент, що діє на рулі 14 привода 12, і відповідно до нього змінюється опір програмувальної резисторної матриці 8 у якірному ланцюзі двигуна чи поріг обмеження струму програму 7 79769 вального обмежника струму 6. У момент досягнення снарядом цілі визначається промах і по ньому судять про якість функціонування автопілоту 11 і привода 12. Живлення пристрою перевірки й устаткування, що перевіряється, здійснюється від універсального джерела електроживлення 9, первинною напругою для якої можуть бути: у лабораторних умовах однофазна мережа 220В, 50Гц чи в польових умовах - постійна напруга +27В від акумулятора. У пристрої передбачений режим роботи без фотоприймального пристрою 10 і імітатора інформаційного поля 15, коли цифрові сигнали, що відповідають відхиленням снаряда від центра інформаційного поля, подаються безпосередньо на входи автопілоту 11. Пропонований спосіб перевірки якості функціонування рульових приводів і автопілотів дозволяє 8 проводити їхню комплексну перевірку функціонування. Вимоги по величині промаху виробляються розроблювачем снаряда, виходячи з тактикотехнічних вимог на снаряд, результатів математичного моделювання, експериментального відпрацьовування й випробувань рульових приводів і автопілотів. Пропонований спосіб перевірки якості функціонування рульових приводів і автопілотів і пристрій для його здійснення, з одного боку, не вимагають застосування навантажувальних пристроїв для рулів, а також проводити запис і обробку вхідних і ви хідних сигналів, з іншого боку, цей спосіб має, у порівнянні з відомими, більшою інформативністю, тому що він дозволяє проводити оцінку роботи приводів і автопілотів в змінних умовах за час польоту снаряда до цілі. 9 Комп’ютерна в ерстка В. Клюкін 79769 Підписне 10 Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for testing quality of functioning of electric steering gears and autopilots of controlled missiles and device for its implementation
Автори англійськоюDotsenko Borys Ivanovych, Korosteliov Oleh Petrovych, Kosovenko Yevhen Viktorovych, Kuzmin Viacheslav Pavlovych, Semenov Leonid Antonovych, Shepelev Yurii Ivanovych, Yakovenko Petro Oleksiiovych
Назва патенту російськоюСпособ проверки качества функционирования электрических рулевых приводов и автопилотов управляемых снарядов и устройство для его реализации
Автори російськоюДоценко Борис Иванович, Коростелев Олег Петрович, Косовенко Евгений Викторович, Кузьмин Вячеслав Павлович, Семенов Леонид Антонович, Шепелев Юрий Иванович, Яковенко Петр Алексеевич
МПК / Мітки
МПК: F42B 15/01
Мітки: автопілотів, рульових, реалізації, пристрій, перевірки, функціонування, якості, керованих, електричних, приводів, снарядів, спосіб
Код посилання
<a href="https://ua.patents.su/5-79769-sposib-perevirki-yakosti-funkcionuvannya-elektrichnikh-rulovikh-privodiv-i-avtopilotiv-kerovanikh-snaryadiv-i-pristrijj-dlya-jjogo-realizaci.html" target="_blank" rel="follow" title="База патентів України">Спосіб перевірки якості функціонування електричних рульових приводів і автопілотів керованих снарядів і пристрій для його реалізації</a>
Спосіб регулювання та перевірки блока управління станції радіотехнічного контролю і пристрій для його реалізації
Номер патенту: 72063
Опубліковано: 17.01.2005
Автори: Мамигонов Борис Вілорович, Мережко Сергій Олексійович, Передерій Людмила Василівна, Смородін Микола Максимович, РЯБЦЕВ АНАТОЛІЙ МИХАЙЛОВИЧ, Яковлев Віталій Васильович, Кікалов Сергій Григорович, Гришко Микола Мефодійович
МПК: G06F 11/00, G05B 23/00, H04B 3/46, G06F 15/00, G01R 31/28, G05B 13/00
Мітки: пристрій, управління, перевірки, спосіб, контролю, реалізації, радіотехнічного, станції, блока, регулювання
Формула / Реферат:
1. Спосіб регулювання та перевірки блока управління станції радіотехнічного контролю, який містить в собі операції комплектування з відповідною комутацією схеми регулювання і перевірки блока управління вимірювальними приладами, джерелами тестових впливів та ЕОМ, підключення схеми регулювання і перевірки до мережі живлення і формування узагальненого показника контролю, який відрізняється тим, що на портах обміну аналоговою та цифровою...
Спосіб регулювання та перевірки блока комутації та підсилення надвисокочастотних сигналів станції радіотехнічного контролю та пристрій для його реалізації
Номер патенту: 72059
Опубліковано: 17.01.2005
Автори: КАПУСТЯН СВІТЛАНА ІВАНІВНА, Шмигирьов Олександр Сергійович, Смородін Микола Максимович, Пухкало Віктор Антонович, РЯБЦЕВ АНАТОЛІЙ МИХАЙЛОВИЧ, БУРКОВ ВІТАЛІЙ ВІКТОРОВИЧ, ДЕМ'ЯНКО АЛЛА ВАСИЛІВНА, Передерій Людмила Василівна, Гришко Микола Мефодійович, Білонога Володимир Петрович, Кураков Валерій Олександрович, ЛОШАК ВІТАЛІЙ ВАСИЛЬОВИЧ
МПК: G05B 23/02, G06F 15/00, H04B 3/46, G01R 31/28
Мітки: реалізації, станції, блока, надвисокочастотних, перевірки, радіотехнічного, пристрій, підсилення, спосіб, комутації, контролю, регулювання, сигналів
Формула / Реферат:
1. Спосіб регулювання та перевірки параметрів блока комутації та підсилення надвисокочастотних сигналів станції радіотехнічного контролю, за яким на блок комутації та підсилення дають сукупність керованих тестових стимулюючих впливів , здійснюють вимірювання сукупності значень вихідних інформативних параметрів
Спосіб регулювання та перевірки блока аналізу та обробки сигналів станції радіотехнічного контролю та пристрій для його реалізації
Номер патенту: 72058
Опубліковано: 17.01.2005
Автори: Гришко Микола Мефодійович, Збиковський Валерій Миколайович, РЕПКІН ОЛЕКСАНДР ІВАНОВИЧ, Грушевенко Ірина Миколаївна, Сергієнко В'ячеслав Петрович, РЯБЦЕВ АНАТОЛІЙ МИХАЙЛОВИЧ, Булгаков Олег Анатолійович, Білонога Володимир Петрович, Гіоргобіані Володимир Галактіонович, Смородін Микола Максимович, ФІРСОВ МИКОЛА МИХАЙЛОВИЧ, Кочерга Віра Михайлівна
МПК: G01R 31/28, H04B 3/46, H04B 17/00, G05B 23/02, G06F 11/00
Мітки: блока, реалізації, регулювання, контролю, аналізу, станції, обробки, спосіб, сигналів, пристрій, перевірки, радіотехнічного
Формула / Реферат:
1. Спосіб регулювання та перевірки блока аналізу та обробки сигналів станції радіотехнічного контролю, за яким блок аналізу та обробки сигналів станції радіотехнічного контролю з'єднують за допомогою пристрою контактування із спеціалізованим контрольно-вимірювальним стендом, який в свою чергу під'єднують до ПЕОМ, на початку діагностичної програми, що зберігається в пам'яті ПЕОМ, проводять ініціалізацію спеціалізованого...
Спосіб перевірки термоелектричного перетворювача температури в термо- е.р.с. та пристрій для його реалізації
Номер патенту: 38644
Опубліковано: 15.07.2003
Автори: Жуков Юрій Даниїлович, Гордєєв Борис Миколайович, Андрусяк Степан Олексійович, Грєшнов Андрій Юрієвич, Наталюк Михайло Филимонович
МПК: G05D 23/00, G01K 7/02, G01K 15/00, H01L 35/00
Мітки: температури, термо, спосіб, реалізації, термоелектричного, пристрій, перевірки, е.р.с, перетворювача
Формула / Реферат:
1. Спосіб перевірки термоелектричного перетворювача температури (ТПТ) в термо-е.р.с., що полягає в нагріванні одних кінців спаю ТПТ та стабілізації температури інших його кінців, вимірюванні термо-е.р.с. вимірювальним засобом при досягнутій різниці температур кінців ТПТ, порівнянні виміряного значення термо-е.р.с. з відповідним значенням термо-е.р.с. номінальної статичної характеристики ТПТ даного типу шляхом знаходження різниці термо-е.р.с....
Спосіб контролю якості короткозамкненої обмотки ротора і пристрій для його реалізації
Номер патенту: 27451
Опубліковано: 15.09.2000
Автори: Стасьо Роман Іванович, Хліпальський Юліан Збігневич, Яцун Михайло Андрійович
МПК: G01R 31/02
Мітки: обмотки, контролю, якості, короткозамкненої, реалізації, спосіб, ротора, пристрій
Текст:
...і ремонту асинхронних електродвигунів Поставлена задача розв'язується таким чи ном, що в способі контролю якості короткозамкненої обмотки ротора, при якому ротор обертають, збуджують в ньому змінні магнітні потоки, виділяють вторинні магнітні потоки, викликані струмами, що наведені в обмотці ротора збуджуючими змінними магнітними потоками і протікають по стержнях короткозамкненої обмотки ротора, вимірюють ЕРС, індуковані вторинними...
Попередній патент: Пристрій для відновлення ушкоджених провідних шляхів нервової системи за нахабою о.о.
Наступний патент: Спосіб виміру вигину ствола вогнепальної зброї і пристрій для його здійснення
Випадковий патент: Спосіб оцінки ефективності лікування хворих із ішемічною кардіоміопатією методом кардіологічної ударно-хвильової терапії