Приймальний пристрій для фазової системи ближньої навігації
Номер патенту: 81371
Опубліковано: 25.06.2013
Автори: Фіалкіна Тетяна Станіславівна, Туренко Дар'я Миколаївна, Кондрашов Віктор Іванович, Кондрашов Ярослав Вікторович

Формула / Реферат
Приймальний пристрій для фазової системи ближньої навігації, який містить синхронізатор, послідовно з'єднані приймач та детектор, послідовно з'єднані перший фільтр піднесучої частоти, перший підсилювач - обмежувач, перший частотний дискримінатор, перший фільтр нижніх частот і фазометр, а також другий фільтр нижніх частот, вихід з якого з'єднаний з другим входом фазометра, який відрізняється тим, що введені перемикач, оперативний запам'ятовуючий блок, блок віднімання, послідовно з'єднані другий фільтр піднесучої частоти, другий підсилювач - обмежувач, другий частотний дискримінатор, третій фільтр нижніх частот і суматор, вихід якого з'єднаний з першим входом перемикача, і послідовно з'єднані генератор опорних коливань і частотний модулятор, вихід якого з'єднаний з другим входом суматора, причому вихід детектора з'єднаний з входом другого фільтра піднесучої частоти і другим входом перемикача, вихід якого з'єднаний з входами першого фільтра піднесучої частоти і другого фільтра нижніх частот, вихід третього фільтра нижніх частот з'єднаний з керівним входом частотного модулятора, виходи фазометра і блока віднімання з'єднані з входами оперативного запам'ятовуючого блока, перший вихід якого є виходом приймального приладу для фазової системи ближньої навігації, виходи керівних сигналів перемикачем і блоком віднімання синхронізатора з'єднані з керівними входами перемикача і блока віднімання, а виходи сигналів керування записом інформації з фазометра і блока віднімання синхронізатора з'єднані з першим і другим керівними входами оперативного запам'ятовуючого блока, другий і третій виходи якого з'єднані з входами блока віднімання.
Текст
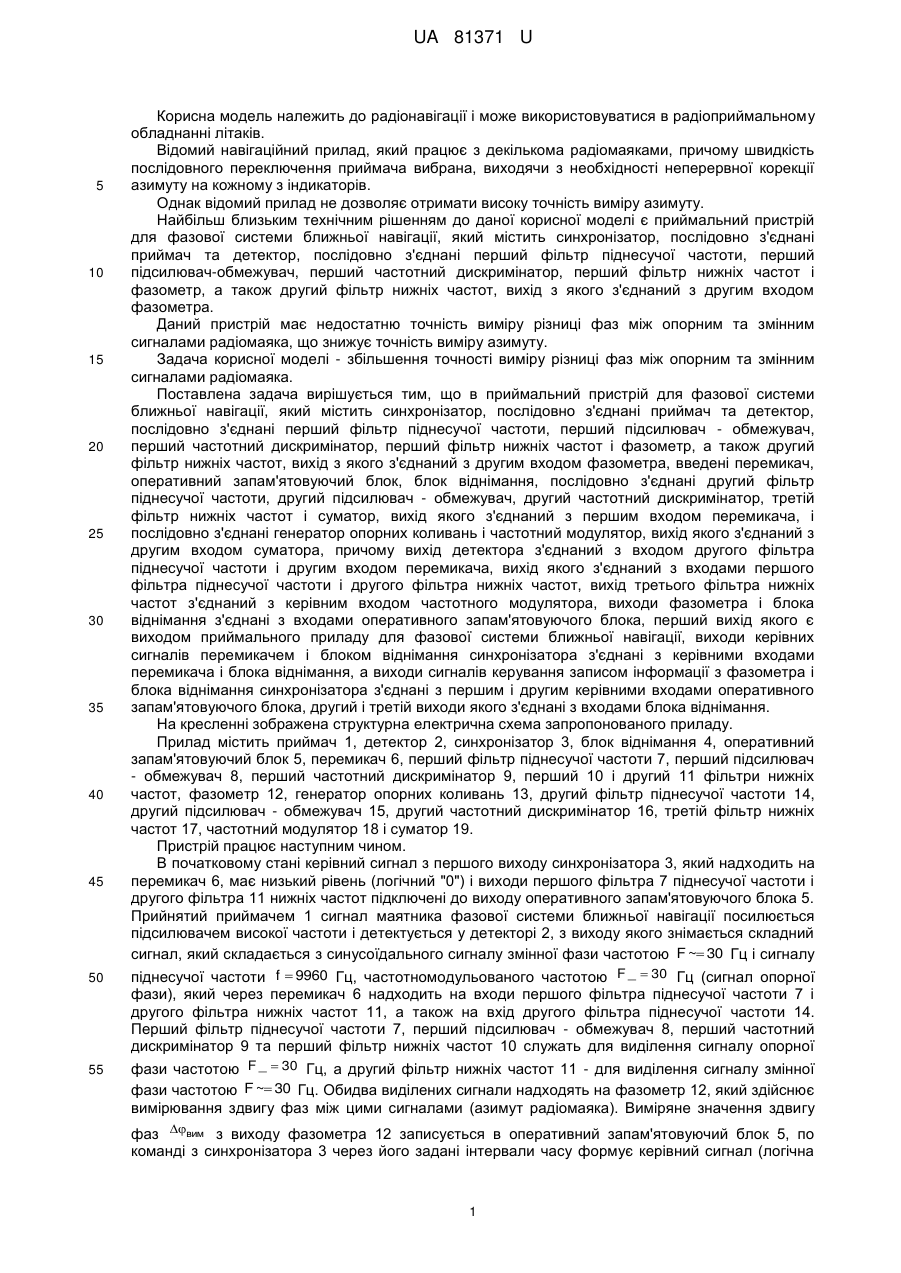
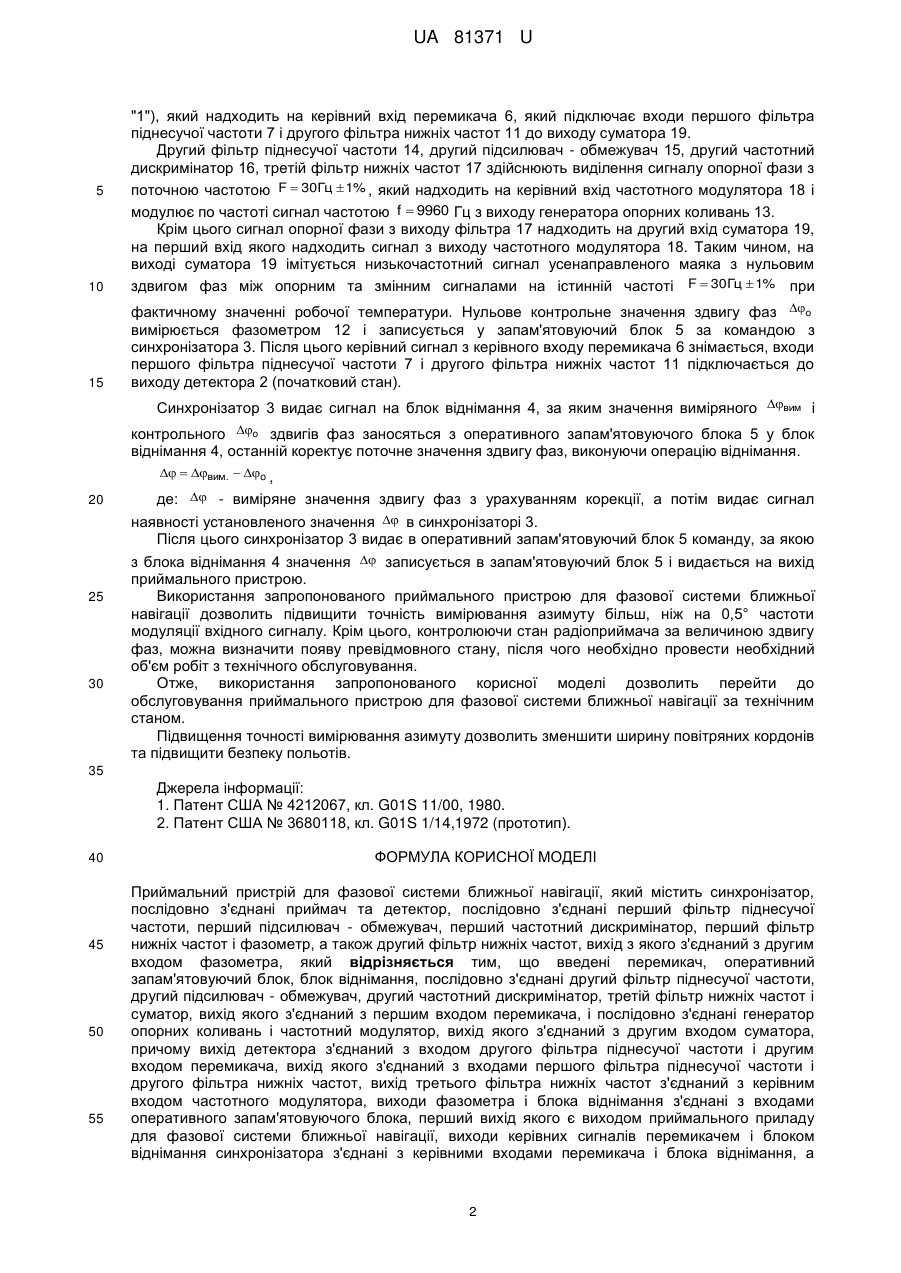
Реферат: UA 81371 U UA 81371 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до радіонавігації і може використовуватися в радіоприймальному обладнанні літаків. Відомий навігаційний прилад, який працює з декількома радіомаяками, причому швидкість послідовного переключення приймача вибрана, виходячи з необхідності неперервної корекції азимуту на кожному з індикаторів. Однак відомий прилад не дозволяє отримати високу точність виміру азимуту. Найбільш близьким технічним рішенням до даної корисної моделі є приймальний пристрій для фазової системи ближньої навігації, який містить синхронізатор, послідовно з'єднані приймач та детектор, послідовно з'єднані перший фільтр піднесучої частоти, перший підсилювач-обмежувач, перший частотний дискримінатор, перший фільтр нижніх частот і фазометр, а також другий фільтр нижніх частот, вихід з якого з'єднаний з другим входом фазометра. Даний пристрій має недостатню точність виміру різниці фаз між опорним та змінним сигналами радіомаяка, що знижує точність виміру азимуту. Задача корисної моделі - збільшення точності виміру різниці фаз між опорним та змінним сигналами радіомаяка. Поставлена задача вирішується тим, що в приймальний пристрій для фазової системи ближньої навігації, який містить синхронізатор, послідовно з'єднані приймач та детектор, послідовно з'єднані перший фільтр піднесучої частоти, перший підсилювач - обмежувач, перший частотний дискримінатор, перший фільтр нижніх частот і фазометр, а також другий фільтр нижніх частот, вихід з якого з'єднаний з другим входом фазометра, введені перемикач, оперативний запам'ятовуючий блок, блок віднімання, послідовно з'єднані другий фільтр піднесучої частоти, другий підсилювач - обмежувач, другий частотний дискримінатор, третій фільтр нижніх частот і суматор, вихід якого з'єднаний з першим входом перемикача, і послідовно з'єднані генератор опорних коливань і частотний модулятор, вихід якого з'єднаний з другим входом суматора, причому вихід детектора з'єднаний з входом другого фільтра піднесучої частоти і другим входом перемикача, вихід якого з'єднаний з входами першого фільтра піднесучої частоти і другого фільтра нижніх частот, вихід третього фільтра нижніх частот з'єднаний з керівним входом частотного модулятора, виходи фазометра і блока віднімання з'єднані з входами оперативного запам'ятовуючого блока, перший вихід якого є виходом приймального приладу для фазової системи ближньої навігації, виходи керівних сигналів перемикачем і блоком віднімання синхронізатора з'єднані з керівними входами перемикача і блока віднімання, а виходи сигналів керування записом інформації з фазометра і блока віднімання синхронізатора з'єднані з першим і другим керівними входами оперативного запам'ятовуючого блока, другий і третій виходи якого з'єднані з входами блока віднімання. На кресленні зображена структурна електрична схема запропонованого приладу. Прилад містить приймач 1, детектор 2, синхронізатор 3, блок віднімання 4, оперативний запам'ятовуючий блок 5, перемикач 6, перший фільтр піднесучої частоти 7, перший підсилювач - обмежувач 8, перший частотний дискримінатор 9, перший 10 і другий 11 фільтри нижніх частот, фазометр 12, генератор опорних коливань 13, другий фільтр піднесучої частоти 14, другий підсилювач - обмежувач 15, другий частотний дискримінатор 16, третій фільтр нижніх частот 17, частотний модулятор 18 і суматор 19. Пристрій працює наступним чином. В початковому стані керівний сигнал з першого виходу синхронізатора 3, який надходить на перемикач 6, має низький рівень (логічний "0") і виходи першого фільтра 7 піднесучої частоти і другого фільтра 11 нижніх частот підключені до виходу оперативного запам'ятовуючого блока 5. Прийнятий приймачем 1 сигнал маятника фазової системи ближньої навігації посилюється підсилювачем високої частоти і детектується у детекторі 2, з виходу якого знімається складний сигнал, який складається з синусоїдального сигналу змінної фази частотою F ~ 30 Гц і сигналу піднесучої частоти f 9960 Гц, частотномодульованого частотою F _ 30 Гц (сигнал опорної фази), який через перемикач 6 надходить на входи першого фільтра піднесучої частоти 7 і другого фільтра нижніх частот 11, а також на вхід другого фільтра піднесучої частоти 14. Перший фільтр піднесучої частоти 7, перший підсилювач - обмежувач 8, перший частотний дискримінатор 9 та перший фільтр нижніх частот 10 служать для виділення сигналу опорної фази частотою F _ 30 Гц, а другий фільтр нижніх частот 11 - для виділення сигналу змінної фази частотою F ~ 30 Гц. Обидва виділених сигнали надходять на фазометр 12, який здійснює вимірювання здвигу фаз між цими сигналами (азимут радіомаяка). Виміряне значення здвигу фаз вим з виходу фазометра 12 записується в оперативний запам'ятовуючий блок 5, по команді з синхронізатора 3 через його задані інтервали часу формує керівний сигнал (логічна 1 UA 81371 U 10 "1"), який надходить на керівний вхід перемикача 6, який підключає входи першого фільтра піднесучої частоти 7 і другого фільтра нижніх частот 11 до виходу суматора 19. Другий фільтр піднесучої частоти 14, другий підсилювач - обмежувач 15, другий частотний дискримінатор 16, третій фільтр нижніх частот 17 здійснюють виділення сигналу опорної фази з поточною частотою F 30Гц 1% , який надходить на керівний вхід частотного модулятора 18 і модулює по частоті сигнал частотою f 9960 Гц з виходу генератора опорних коливань 13. Крім цього сигнал опорної фази з виходу фільтра 17 надходить на другий вхід суматора 19, на перший вхід якого надходить сигнал з виходу частотного модулятора 18. Таким чином, на виході суматора 19 імітується низькочастотний сигнал усенаправленого маяка з нульовим здвигом фаз між опорним та змінним сигналами на істинній частоті F 30Гц 1% при 15 фактичному значенні робочої температури. Нульове контрольне значення здвигу фаз o вимірюється фазометром 12 і записується у запам'ятовуючий блок 5 за командою з синхронізатора 3. Після цього керівний сигнал з керівного входу перемикача 6 знімається, входи першого фільтра піднесучої частоти 7 і другого фільтра нижніх частот 11 підключається до виходу детектора 2 (початковий стан). 5 Синхронізатор 3 видає сигнал на блок віднімання 4, за яким значення виміряного вим і контрольного o здвигів фаз заносяться з оперативного запам'ятовуючого блока 5 у блок віднімання 4, останній коректує поточне значення здвигу фаз, виконуючи операцію віднімання. вим. o , 20 25 30 де: - виміряне значення здвигу фаз з урахуванням корекції, а потім видає сигнал наявності установленого значення в синхронізаторі 3. Після цього синхронізатор 3 видає в оперативний запам'ятовуючий блок 5 команду, за якою з блока віднімання 4 значення записується в запам'ятовуючий блок 5 і видається на вихід приймального пристрою. Використання запропонованого приймального пристрою для фазової системи ближньої навігації дозволить підвищити точність вимірювання азимуту більш, ніж на 0,5° частоти модуляції вхідного сигналу. Крім цього, контролюючи стан радіоприймача за величиною здвигу фаз, можна визначити появу превідмовного стану, після чого необхідно провести необхідний об'єм робіт з технічного обслуговування. Отже, використання запропонованого корисної моделі дозволить перейти до обслуговування приймального пристрою для фазової системи ближньої навігації за технічним станом. Підвищення точності вимірювання азимуту дозволить зменшити ширину повітряних кордонів та підвищити безпеку польотів. 35 Джерела інформації: 1. Патент США № 4212067, кл. G01S 11/00, 1980. 2. Патент США № 3680118, кл. G01S 1/14,1972 (прототип). 40 45 50 55 ФОРМУЛА КОРИСНОЇ МОДЕЛІ Приймальний пристрій для фазової системи ближньої навігації, який містить синхронізатор, послідовно з'єднані приймач та детектор, послідовно з'єднані перший фільтр піднесучої частоти, перший підсилювач - обмежувач, перший частотний дискримінатор, перший фільтр нижніх частот і фазометр, а також другий фільтр нижніх частот, вихід з якого з'єднаний з другим входом фазометра, який відрізняється тим, що введені перемикач, оперативний запам'ятовуючий блок, блок віднімання, послідовно з'єднані другий фільтр піднесучої частоти, другий підсилювач - обмежувач, другий частотний дискримінатор, третій фільтр нижніх частот і суматор, вихід якого з'єднаний з першим входом перемикача, і послідовно з'єднані генератор опорних коливань і частотний модулятор, вихід якого з'єднаний з другим входом суматора, причому вихід детектора з'єднаний з входом другого фільтра піднесучої частоти і другим входом перемикача, вихід якого з'єднаний з входами першого фільтра піднесучої частоти і другого фільтра нижніх частот, вихід третього фільтра нижніх частот з'єднаний з керівним входом частотного модулятора, виходи фазометра і блока віднімання з'єднані з входами оперативного запам'ятовуючого блока, перший вихід якого є виходом приймального приладу для фазової системи ближньої навігації, виходи керівних сигналів перемикачем і блоком віднімання синхронізатора з'єднані з керівними входами перемикача і блока віднімання, а 2 UA 81371 U виходи сигналів керування записом інформації з фазометра і блока віднімання синхронізатора з'єднані з першим і другим керівними входами оперативного запам'ятовуючого блока, другий і третій виходи якого з'єднані з входами блока віднімання. Комп’ютерна верстка І. Скворцова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюReceiver for phase system of short-range navigation
Автори англійськоюKondrashov Viktor Ivanovych, Kondrashov Yaroslav Viktorovych, Fialkina Tetiana Stanislavivna, Turenko Daria Mykolaivna
Назва патенту російськоюПринимающее устройство для фазовой системы ближней навигации
Автори російськоюКондрашов Виктор Иванович, Кондрашов Ярослав Викторович, Фиалкина Татьяна Станиславовна, Туренко Дарья Николаевна
МПК / Мітки
МПК: G01S 1/00
Мітки: фазової, ближньої, приймальний, пристрій, системі, навігації
Код посилання
<a href="https://ua.patents.su/5-81371-prijjmalnijj-pristrijj-dlya-fazovo-sistemi-blizhno-navigaci.html" target="_blank" rel="follow" title="База патентів України">Приймальний пристрій для фазової системи ближньої навігації</a>
Пристрій фазової автопідстройки частоти з додатковим каналом фазової компенсації

Номер патенту: 69507
Опубліковано: 25.04.2012
Автори: Макаров Сергій Анатолійович, Меленті Євген Олександрович, Чекунова Оксана Миколаївна, Рот Світлана Миколаївна, Воробйов Руслан Володимирович
МПК: H03L 7/00
Мітки: пристрій, автопідстройки, каналом, компенсації, фазової, частоти, додатковим
Формула / Реферат:
Пристрій фазової автопідстройки частоти з додатковим каналом фазової компенсації містить послідовно з'єднані еталонний генератор, фазовий модулятор, перший фазовий детектор, перший фільтр нижніх частот і генератор керованої напруги, вихід якого з'єднаний із другими входами першого і другого фазових детекторів, а вихід другого фазового детектора з'єднаний з входом другого фільтра нижніх частот, постійна часу якого перевищує постійну часу...
Пристрій фазової автопідстройки частоти

Номер патенту: 61317
Опубліковано: 11.07.2011
Автори: Чекунова Оксана Миколаївна, Лосєв Юрій Іванович, Рот Світлана Миколаївна, Шулежко Володимир Васильович, Коломійцев Олексій Володимирович, Макаров Сергій Анатолійович, Кулик Олександр Петрович, Тітов Ігор Володимирович
МПК: H03L 7/00
Мітки: частоти, автопідстройки, фазової, пристрій
Формула / Реферат:
Пристрій фазової автопідстройки частоти, який містить послідовно з'єднані еталонний генератор, фазовий модулятор, перший фазовий детектор, перший фільтр нижніх частот і генератор керованої напруги, вихід якого з'єднаний із другими входами першого і другого фазових детекторів, а вихід другого фазового детектора з'єднаний з входом другого фільтра нижніх частот, постійна часу якого перевищує постійну часу першого фільтра нижніх частот, при...
Радіолокаційний пристрій моніторингу ближньої зони
Номер патенту: 67326
Опубліковано: 10.02.2012
Автори: Хитровський Валентин Антонович, Шульгач Олег Володимирович
МПК: G01S 13/02
Мітки: ближньої, моніторингу, радіолокаційний, зони, пристрій
Формула / Реферат:
1. Радіолокаційний пристрій моніторингу ближньої зони, що містить пристрій обробки й індикації та приймач-передавач, при цьому до складу пристрою обробки й індикації входять синхронізатор, генератор кодів, джерело видачі звукової інформації, пороговий блок і вихідний блок, до складу приймача-передавача входять зв'язані між собою багатоканальним зворотним зв'язком передавальний пристрій, приймальний пристрій, блок формування гетеродинних...
Трійковий елемент максимуму

Номер патенту: 34465
Опубліковано: 11.08.2008
Автори: Семенов Андрій Олександрович, Войцеховська Ольга Олександрівна, Семенова Олена Олександрівна
МПК: H03K 19/20
Мітки: елемент, максимуму, трійковий
Формула / Реферат:
Трійковий елемент максимуму, який містить два балансні модулятори, фільтр верхніх частот, фільтр нижніх частот і розподільник потужності, який відрізняється тим, що в нього додатково введено другий фільтр верхніх частот і подільник частоти, вихід першого балансного модулятора з'єднаний з входом розподільника потужності, перший вихід якого з'єднаний з входом першого фільтра верхніх частот, вихід якого з'єднаний з першим входом другого...
Трійковий елемент мінімуму
Номер патенту: 33476
Опубліковано: 25.06.2008
Автори: Семенова Олена Олександрівна, Семенов Андрій Олександрович, Войцеховська Ольга Олександрівна
МПК: H03K 19/20
Мітки: трійковий, мінімуму, елемент
Формула / Реферат:
Трійковий елемент мінімуму, який містить два балансні модулятори, фільтр верхніх частот, перший фільтр нижніх частот і розподільник потужності, який відрізняється тим, що у нього введено другий фільтр нижніх частот і подільник частоти, вихід першого балансного модулятора з'єднаний з входом розподільника потужності, перший вихід якого з'єднаний з входом фільтра верхніх частот, вихід якого з'єднаний з першим входом другого балансного...
Попередній патент: Система дистанційного управління рухом безпілотного літального апарата
Наступний патент: Безпілотний літальний апарат
Випадковий патент: Спосіб виготовлення гнутих металевих профілів і профіль, який виготовляється даним способом