Система дистанційного управління рухом безпілотного літального апарата
Номер патенту: 81370
Опубліковано: 25.06.2013
Автори: Матійчик Денис Михайлович, Тупіцин Микола Федорович, Коваль Олександр Васильович
Формула / Реферат
Система дистанційного управління рухом безпілотного літального апарата, яка складається з системи автоматичного управління, відеокамери, пристрою управління відеокамери, геореєстратора, аерокартографа, відеоархіву на борту літального апарата, радіолінії та наземної апаратури з радіолінією, апаратури формування команд управління безпілотним літальним апаратом, дисплеєм зовнішнього пілота і відеоархіву зовнішнього пілота, яка відрізняється тим, що в систему включений блок перемикання управління безпілотним літальним апаратом від системи автоматичного управління до зовнішнього пілота та у зворотному напрямку, а пристрій управління відеокамерою складається з сервоприводу, що компенсує кут нахилу відеокамери по крену.
Текст
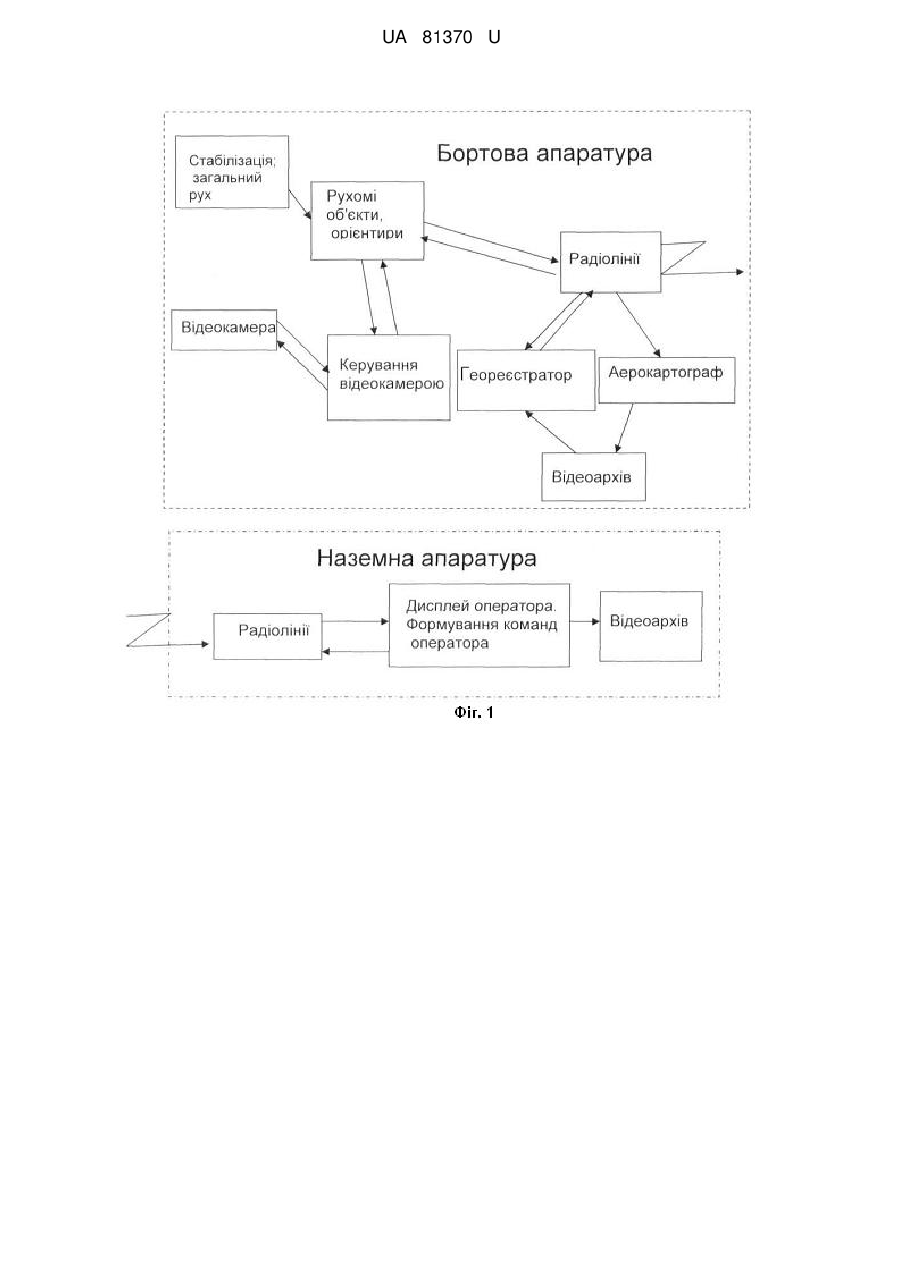
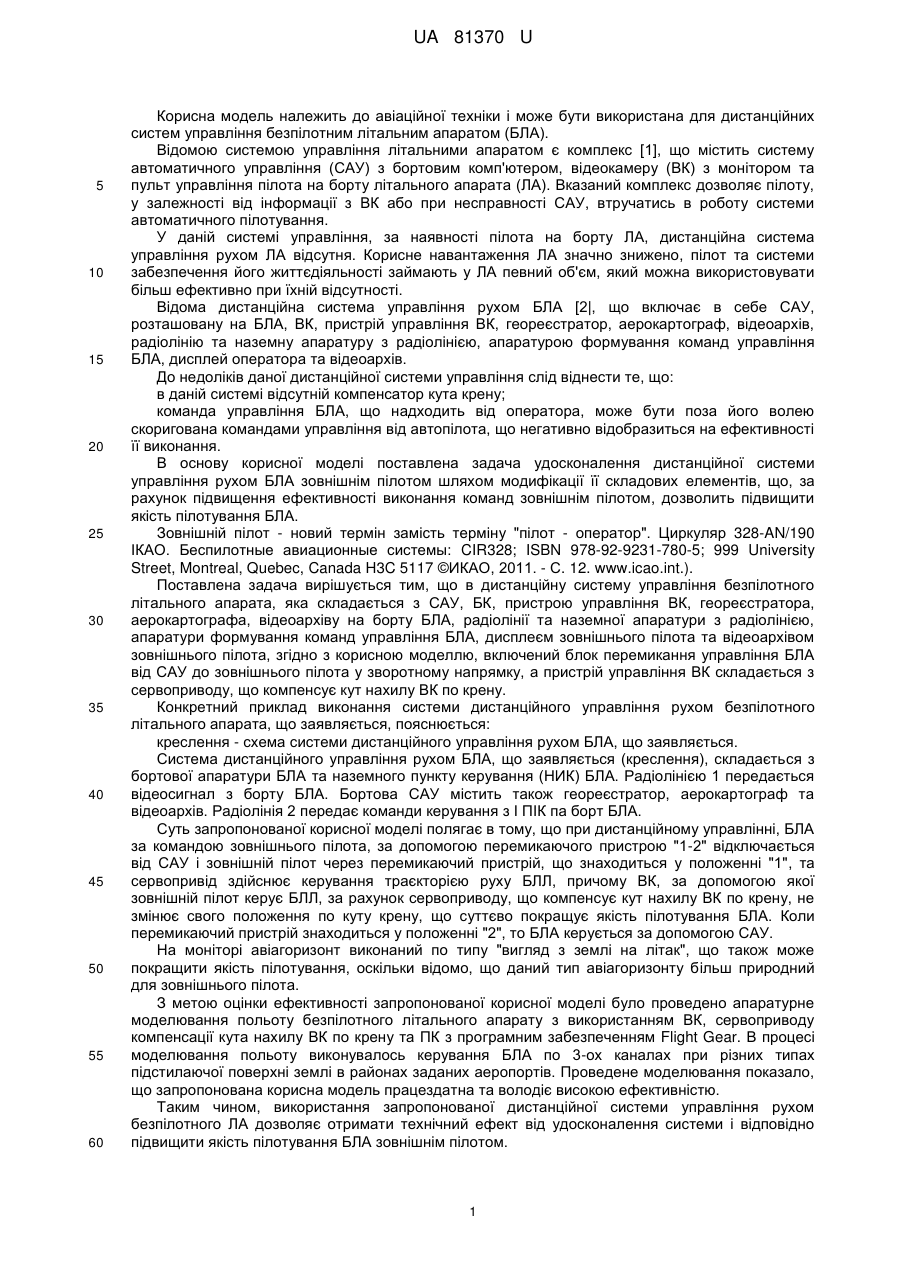
Реферат: Система дистанційного управління рухом безпілотного літального апарата складається з системи автоматичного управління, відеокамери, пристрою управління відеокамери, геореєстратора, аерокартографа, відеоархіву на борту літального апарата, радіолінії та наземної апаратури з радіолінією, апаратури формування команд управління безпілотним літальним апаратом, дисплеєм зовнішнього пілота і відеоархіву зовнішнього пілота. В систему включений блок перемикання управління безпілотним літальним апаратом від системи автоматичного управління до зовнішнього пілота та у зворотному напрямку, а пристрій управління відеокамерою складається з сервоприводу, що компенсує кут нахилу відеокамери по крену. UA 81370 U (54) СИСТЕМА ДИСТАНЦІЙНОГО УПРАВЛІННЯ РУХОМ БЕЗПІЛОТНОГО ЛІТАЛЬНОГО АПАРАТА UA 81370 U UA 81370 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до авіаційної техніки і може бути використана для дистанційних систем управління безпілотним літальним апаратом (БЛА). Відомою системою управління літальними апаратом є комплекс [1], що містить систему автоматичного управління (САУ) з бортовим комп'ютером, відеокамеру (ВК) з монітором та пульт управління пілота на борту літального апарата (ЛА). Вказаний комплекс дозволяє пілоту, у залежності від інформації з ВК або при несправності САУ, втручатись в роботу системи автоматичного пілотування. У даній системі управління, за наявності пілота на борту ЛА, дистанційна система управління рухом ЛА відсутня. Корисне навантаження ЛА значно знижено, пілот та системи забезпечення його життєдіяльності займають у ЛА певний об'єм, який можна використовувати більш ефективно при їхній відсутності. Відома дистанційна система управління рухом БЛА [2|, що включає в себе САУ, розташовану на БЛА, ВК, пристрій управління ВК, геореєстратор, аерокартограф, відеоархів, радіолінію та наземну апаратуру з радіолінією, апаратурою формування команд управління БЛА, дисплей оператора та відеоархів. До недоліків даної дистанційної системи управління слід віднести те, що: в даній системі відсутній компенсатор кута крену; команда управління БЛА, що надходить від оператора, може бути поза його волею скоригована командами управління від автопілота, що негативно відобразиться на ефективності її виконання. В основу корисної моделі поставлена задача удосконалення дистанційної системи управління рухом БЛА зовнішнім пілотом шляхом модифікації її складових елементів, що, за рахунок підвищення ефективності виконання команд зовнішнім пілотом, дозволить підвищити якість пілотування БЛА. Зовнішній пілот - новий термін замість терміну "пілот - оператор". Циркуляр 328-AN/190 ІКАО. Беспилотные авиационные системы: CIR328; ISBN 978-92-9231-780-5; 999 University Street, Montreal, Quebec, Canada H3C 5117 ©ИКАО, 2011. - С. 12. www.icao.int.). Поставлена задача вирішується тим, що в дистанційну систему управління безпілотного літального апарата, яка складається з САУ, БК, пристрою управління ВК, геореєстратора, аерокартографа, відеоархіву на борту БЛА, радіолінії та наземної апаратури з радіолінією, апаратури формування команд управління БЛА, дисплеєм зовнішнього пілота та відеоархівом зовнішнього пілота, згідно з корисною моделлю, включений блок перемикання управління БЛА від САУ до зовнішнього пілота у зворотному напрямку, а пристрій управління ВК складається з сервоприводу, що компенсує кут нахилу ВК по крену. Конкретний приклад виконання системи дистанційного управління рухом безпілотного літального апарата, що заявляється, пояснюється: креслення - схема системи дистанційного управління рухом БЛА, що заявляється. Система дистанційного управління рухом БЛА, що заявляється (креслення), складається з бортової апаратури БЛА та наземного пункту керування (НИК) БЛА. Радіолінією 1 передається відеосигнал з борту БЛА. Бортова САУ містить також геореєстратор, аерокартограф та відеоархів. Радіолінія 2 передає команди керування з І ПІК па борт БЛА. Суть запропонованої корисної моделі полягає в тому, що при дистанційному управлінні, БЛА за командою зовнішнього пілота, за допомогою перемикаючого пристрою "1-2" відключається від САУ і зовнішній пілот через перемикаючий пристрій, що знаходиться у положенні "1", та сервопривід здійснює керування траєкторією руху БЛЛ, причому ВК, за допомогою якої зовнішній пілот керує БЛЛ, за рахунок сервоприводу, що компенсує кут нахилу ВК по крену, не змінює свого положення по куту крену, що суттєво покращує якість пілотування БЛА. Коли перемикаючий пристрій знаходиться у положенні "2", то БЛА керується за допомогою САУ. На моніторі авіагоризонт виконаний по типу "вигляд з землі на літак", що також може покращити якість пілотування, оскільки відомо, що даний тип авіагоризонту більш природний для зовнішнього пілота. З метою оцінки ефективності запропонованої корисної моделі було проведено апаратурне моделювання польоту безпілотного літального апарату з використанням ВК, сервоприводу компенсації кута нахилу ВК по крену та ПК з програмним забезпеченням Flight Gear. В процесі моделювання польоту виконувалось керування БЛА по 3-ох каналах при різних типах підстилаючої поверхні землі в районах заданих аеропортів. Проведене моделювання показало, що запропонована корисна модель працездатна та володіє високою ефективністю. Таким чином, використання запропонованої дистанційної системи управління рухом безпілотного ЛА дозволяє отримати технічний ефект від удосконалення системи і відповідно підвищити якість пілотування БЛА зовнішнім пілотом. 1 UA 81370 U Вказана корисна модель реалізована на рівні технічної пропозиції і може знайти своє широке застосування в системах управління безпілотними літальними апаратами. 5 Джерела інформації: 1. Кучерявий А.А. Бортовые информационные системы: курс лекций. / под ред. В.А.Мишина и Г.И.Клюева.-2-е изд. перераб. и доп. Ульяновск: У л ГТУ, 2004.-504 с. 2. Семенов А. А. Комплекс средств получения и передачи информации с беспилотных летательных аппаратов. Известия высших учебных заведении. Приборостроение, 2005. - Т.48.№4. - С. 14-18. 10 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 Система дистанційного управління рухом безпілотного літального апарата, яка складається з системи автоматичного управління, відеокамери, пристрою управління відеокамери, геореєстратора, аерокартографа, відеоархіву на борту літального апарата, радіолінії та наземної апаратури з радіолінією, апаратури формування команд управління безпілотним літальним апаратом, дисплеєм зовнішнього пілота і відеоархіву зовнішнього пілота, яка відрізняється тим, що в систему включений блок перемикання управління безпілотним літальним апаратом від системи автоматичного управління до зовнішнього пілота та у зворотному напрямку, а пристрій управління відеокамерою складається з сервоприводу, що компенсує кут нахилу відеокамери по крену. Комп’ютерна верстка І. Скворцова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Назва патенту англійськоюRemote control system of movement of pilotless aircraft
Автори англійськоюKoval Oleksandr Vasyliovych, Matiichyk Denys Mykhailovych, Tupitsyn Mykola Fedorovych
Назва патенту російськоюСистема дистанционного управления движением беспилотного летательного аппарата
Автори російськоюКоваль Александр Васильевич, Матийчик Денис Михайлович, Тупицын Николай Федорович
МПК / Мітки
МПК: B64C 13/16, B64C 13/00, B64C 19/00
Мітки: управління, літального, система, рухом, безпілотного, апарата, дистанційного
Код посилання
<a href="https://ua.patents.su/4-81370-sistema-distancijjnogo-upravlinnya-rukhom-bezpilotnogo-litalnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Система дистанційного управління рухом безпілотного літального апарата</a>
Відмовостійка система керування боковим рухом безпілотного літального апарата

Номер патенту: 35088
Опубліковано: 26.08.2008
Автори: Амеліна Ірина Вікторівна, Бандура Іван Миколайович, Симонов Володимир Федорович
МПК: B64C 13/00, G05D 1/03
Мітки: апарата, рухом, літального, система, безпілотного, керування, боковим, відмовостійка
Формула / Реферат:
Відмовостійка система керування боковим рухом безпілотного літального апарата, що містить перший датчик кутової швидкості рискання, перший та другий суматори, перший та другий підсилювачі, привід керма напрямку, датчик положення керма напрямку, перший датчик кутової швидкості крену, привід елеронів, обчислювач значень кута крену, перший, другий датчики тиску, датчик положення елеронів, блок віднімання, формувач значень сигналу кута ковзання,...
Система стабілізації безпілотного літального апарата
Номер патенту: 65285
Опубліковано: 25.11.2011
Автори: Кописов Олег Едуардович, Субота Анатолій Максимович, Льовкін Сергій Генадійович
МПК: B64C 13/00
Мітки: стабілізації, апарата, літального, безпілотного, система
Формула / Реферат:
Система стабілізації безпілотного літального апарата, що містить послідовно з'єднані обчислювач, підсилювач, рульову машину, орган управління та датчик кута, датчик кутової швидкості, яка відрізняється тим, що містить задатчик, вихід якого з'єднаний з входом обчислювача, вихід рульової машини одночасно з'єднаний з входом органа управління і через перший перетворювач з'єднаний з входом адаптивного контура, а вихід органа управління з'єднаний...
Система стабілізації бокового каналу безпілотного літального апарата
Номер патенту: 36498
Опубліковано: 27.10.2008
Автори: Амелін Сергій Вікторович, Бондар Катерина Михайлівна, Жалніна Вікторія Василівна
МПК: G05D 1/03
Мітки: апарата, каналу, стабілізації, бокового, система, безпілотного, літального
Формула / Реферат:
Система стабілізації бокового каналу безпілотного літального апарата, що містить перший та другий порівнювальні пристрої, електронні ключі, сервопривід, вихід якого з'єднаний з входом об'єкта керування, а вхід - з виходом першого блока формування керуючих сигналів, датчик кута та датчик кутової швидкості, які послідовно з'єднані з виходами об'єкта керування, яка відрізняється тим, що до її складу введені нормуючі підсилювачі, входи яких...
Система стабілізації безпілотного літального апарата

Номер патенту: 11582
Опубліковано: 16.01.2006
Автори: Амелін Сергій Вікторович, Симонов Володимир Федорович, Бандура Іван Миколайович, Антошик Вікторія Миколаївна
МПК: G05D 1/03, B64C 13/00
Мітки: апарата, система, безпілотного, стабілізації, літального
Формула / Реферат:
1. Система стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, суматор, підсилювач, рульовий привід та датчики кута тангажа та кутової швидкості тангажа, яка відрізняється тим, що в неї введено обчислювач, з'єднаний з виходом суматора та входом рульового приводу об'єкта управління, і фільтр, з'єднаний з виходом датчика кута тангажа і порівнювальним пристроєм.2. Система стабілізації безпілотного літального...
Система керування безпілотного літального апарата
Номер патенту: 45231
Опубліковано: 26.10.2009
Автори: Честних Тимур Володимирович, Симонов Володимир Федорович
МПК: B64C 13/00, G05D 1/03
Мітки: апарата, керування, система, літального, безпілотного
Формула / Реферат:
Система керування безпілотного літального апарата, що складається з послідовно з'єднаних задавача, мультиплексора, аналого-цифрового перетворювача, обчислювача, цифро-аналогового перетворювача, сервоприводу, вихід якого під'єднаний до об'єкта керування, а також датчиків кута та кутової швидкості, виходи яких з'єднані з входами відповідно першого та другого нормуючих підсилювачів, виходи яких з'єднані з другим та третім входами мультиплексора,...