Комплекс для задання режимів роботи взаємопов’язаних частотно-регульованих електроприводів
Номер патенту: 82160
Опубліковано: 25.07.2013
Автори: Пшенишний Віктор Вікторович, Лещук Олексій Юрійович, Артеменко Людмила Леонідівна, Гладир Андрій Іванович, Хребтова Оксана Анатоліївна
Формула / Реферат
Комплекс для задання режимів роботи взаємопов'язаних частотно-регульованих електроприводів, який містить дводвигунний частотно-регульований асинхронний електропривод для керування виконавчими механізмами, датчики зворотних зв'язків, мікропроцесорну систему керування для забезпечення синхронної роботи електроприводів, який відрізняється тим, що додатково обладнаний задавальним пристроєм, блоком керування ведучого двигуна; вхід якого з'єднано з виходом задавального пристрою, а вихід з'єднано з входом перетворювача частоти ведучого двигуна, блоком задання швидкості веденого двигуна, один з входів якого з'єднано з виходом задавального пристрою, а інший вхід - з виходом датчика ведучого двигуна, блоком порівняння, один з входів якого підключено до виходу блока задання швидкості, інший вхід - до виходу датчика веденого двигуна, а отриманий вихідний сигнал блока порівняння подається на вхід перетворювача частоти веденого двигуна.
Текст
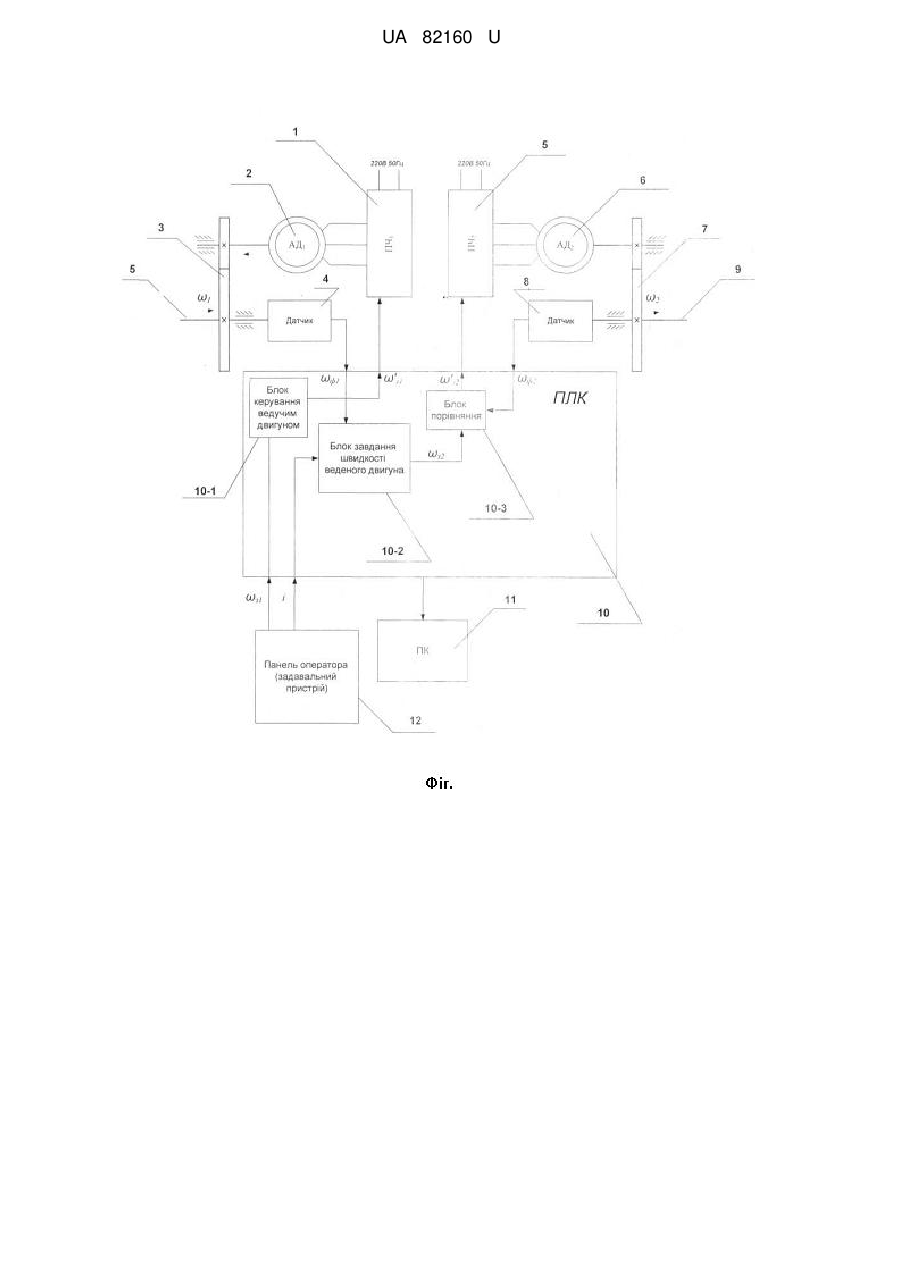
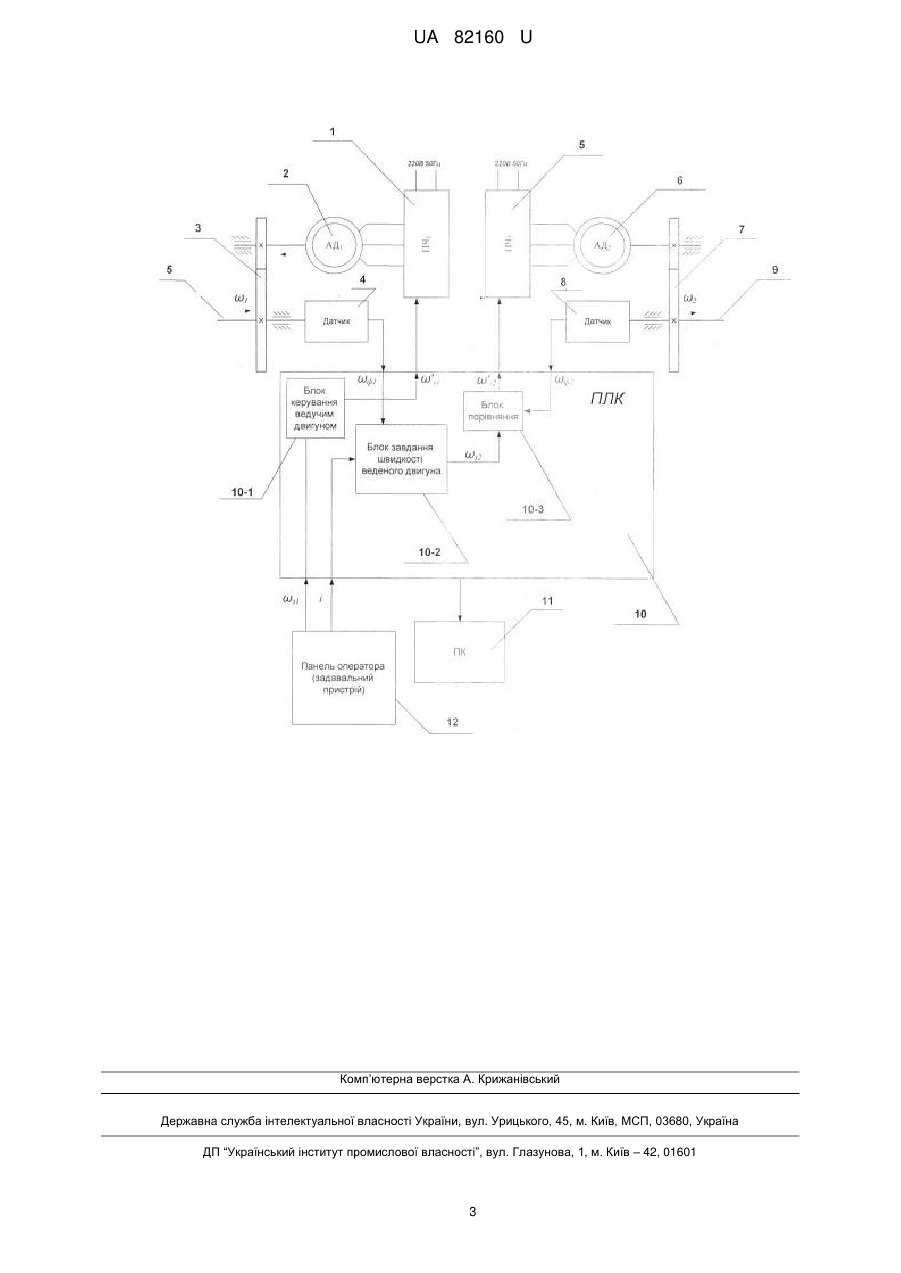
Реферат: Комплекс для задання режимів роботи взаємопов'язаних частотно-регульованих електроприводів містить дводвигунний частотно-регульований асинхронний електропривод, датчики зворотних зв'язків, мікропроцесорну систему керування, задавальний пристрій, блок керування ведучого двигуна; перетворювач частоти ведучого двигуна, блок задання швидкості веденого двигуна, датчик ведучого двигуна, блок порівняння, датчик веденого двигуна, перетворювач частоти веденого двигуна. UA 82160 U (12) UA 82160 U UA 82160 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до електротехніки, зокрема до частотно-регульованого автоматизованого електропривода та може бути використана: для керування технологічними механізмами, що потребують узгодженого поступального або обертального руху складових ланок; як тренажерний комплекс при підготовці фахівців електромеханічного профілю; при виконанні наукових досліджень з вдосконалення взаємопов'язаних частотно-регульованих електроприводів. Значна кількість технологічних механізмів, що використовується при експлуатації гідротехнічних споруд, в легкій промисловості, поліграфічному виробництві, сільському господарстві тощо потребує узгодженого обертання двох чи більшої кількості осей. Деякі з них (затвори водоскидальних гребель, ворота шлюзів, розвідні мости, корабельні гребні гвинти, портальні крани) потребують синфазного положення елементів в процесі їх поступального або обертального руху, що досягається синхронним обертанням валів приводних двигунів відповідних ланок з однаковим значенням кутових швидкостей ω1 і ω2, тобто і = ω1/ω2=1. Інші механізми (ротаційні папероробні машини, чесальні машини ткацького виробництва, намотувальні верстати тощо) потребують фіксованого значення кутових швидкостей приводних двигунів для кожної окремої ланки, згідно з вимогами технологічного процесу, тобто і = ω1/ω2 ≠ 1. Спільною характеристикою зазначених механізмів є стале співвідношення швидкостей руху або частот обертання окремих ланок і = ω1/ω2=const. Для зменшення витрат на придбання та експлуатацію обладнання навчально-дослідних лабораторій та промислових підприємств досить часто, в залежності від технологічних потреб, виникає необхідність використання одного й того самого пристрою для керування тим чи іншим технологічним механізмом з відповідним значення ω1/ω2 згідно вимог технологічного процесу. Відома система синхронного обертання асинхронних двигунів "зрівнювальний електричний вал" [Чиликин М, Г., Сандлер А. С. Общий курс электропривода: Учебник для вузов. - М.: Энергоиздат, 1981.-576 с.], що містить два головних двигуни, вали яких механічно з'єднано з виробничим механізмом, а статорні обмотки підімкнено до мережі, та дві допоміжні зрівняльні машини, роторні обмотки яких з'єднано між собою. Недоліками даної системи є: відсутність можливості зміни співвідношення швидкостей обертання двигунів; низьке значення коефіцієнта корисної дії і надійності, висока коливальність, обмежена динамічна стійкість; відсутність будь-яких вимірювальних перетворювачів для контролю режимів роботи. Суттєві ознаки, що збігаються із способом що заявляється: - забезпечення синхронного обертання приводних двигунів; - використання асинхронних двигунів як приводних електричних машин. Найближчим аналогом є пристрій для керування процесом пересування мостового крану, запропонований фірмою "Лифт-Комплект" [Технічна документація. [Електронний ресурс] Режим доступу: http://lift21.ru/convertercrane]. Дане технічне рішення мінімізує перекошування конструкції моста ківшевого крана в процесі його пересування по рельсових направляючих шляхом отримання програмованим логічним контролером від ультразвукових датчиків інформації про ступінь перекошування об'єкта керування, визначення необхідного співвідношення швидкостей обертання валів приводних двигунів тяглових візків та подання відповідних керуючих сигналів на кожен із двох частотно-регульованих асинхронних електроприводів. Недоліком даного технічного рішення є неможливість вибрання та подальшого забезпечення певного сталого співвідношення ω1/ω2, що обмежує можливості його застосування. Суттєві ознаки, що збігаються із технічним рішенням що заявляється: - використання дводвигунного частотно-регульованого електропривода; - можливість синхронної роботи електроприводів; - наявність датчиків зворотного зв'язку за контрольованими параметрами. В основу корисної моделі, що заявляється, поставлена задача створення комплексу для задання режимів роботи взаємопов'язаних частотно-регульованих електроприводів, що являє собою універсальну систему керування дводвигунним електроприводом для підтримання заданого фіксованого співвідношення кутових швидкостей обертання валів приводних електричних машин. Поставлена задача вирішується шляхом використання програмованого логічного контролера (ПЛК), що, у відповідності до вибраного оператором значення (і = ω1/ω2 ≠ 1 або і = ω1/ω2=1) та заданої швидкості ведучого електропривода (ωз1), задає необхідну швидкість веденого електропривода на підставі отриманої інформації про поточний стан об'єкта, що надходить до ПЛК від датчиків кута повороту вихідних валів відповідних редукторів. 1 UA 82160 U 5 10 15 20 25 30 35 Технічний результат полягає в зменшенні витрат на придбання та експлуатацію систем керування взаємопов'язаними частотно-регульованими електроприводами в умовах навчальнодослідних лабораторій та промислових підприємств за рахунок використання - одного й того самого пристрою для керування, в залежності технологічних потреб, тим чи іншим технологічним механізмом, що характеризується відповідним заданим значенням і. Корисна модель пояснюється кресленням, де на кресленні наведено функціональну схему пристрою для задання режимів роботи взаємопов'язаних частотно-регульованих електроприводів та прийнято наступні позначення: 1, 5 - перетворювачі частоти (ПЧ); 2, 6 асинхронні двигуни (АД); 3, 7 - редуктори; 4, 8 - датчики кута повороту; 5, 9 - вихідні вали редукторів; 10 - програмований логічний контролер (ПЛК); 10-1 - блок керування ведучим двигуном; 10-2 - блок задання швидкості веденого двигуна; 10-3 - блок порівняння; 11 персональний комп'ютер (ПК); 12 - задавальний пристрій. Комплекс, що заявляється, складається із (див. креслення) асинхронних двигунів 2 та 6, що живляться від перетворювачів частоти 1, 5 та з'єднані з редукторами 3, 7, а вихідні вали редукторів 5 та 9 з'єднано з валами датчиків контролю кута повороту 4, 8 відповідно, програмованого логічного контролера 10. Програмований логічний контролер (10) є комплектною мікропроцесорною системою керування вищого функціонального рівня, яка складається з програмної та апаратної частини. Остання містить: блок керування ведучим двигуном 10-1, вхід якого з'єднано з виходом задавального пристрою 12, а вихід блоку 10-1 з'єднано з входом ПЧ1 (1); блок завдання швидкості веденого, двигуна (10-2), один з входів якого з'єднано з виходом задавального пристрою (12), інший вхід - з виходом датчика (4), а вихід блоку 10-2 з'єднано з блоком порівняння 10-3. Один з входів блока порівняння 10-3 з'єднано з виходом блока задання швидкості веденого двигуна 10-2, інший вхід блока 10-3 з'єднано з виходом датчика 8, а вихід блока (10-3) з'єднано з входом ПЧ2 (5). Інформаційний вихід ПЛК (10) з'єднано з входом персонального комп'ютера (11). Робота комплексу починається з вибору оператором одного з двох режимів роботи взаємопов'язаних частотно-регульованих електроприводів: забезпечення синхронізації швидкостей (ω1 = ω2) або забезпечення їх заданого співвідношення (і = ω1/ω2 ≠ 1=const). За допомогою задавального пристрою 12 задаються основні параметри об'єкту керування, що передаються на ПЛК 10 - значення швидкості (ωз1) вала ведучого двигуна, значення співвідношення швидкостей між ведучим та веденими приводами (і). Після введення параметрів розпочинається робота системи керування, що полягає у надходженні від блока керування ПЛК (10-1) на входу ПЧ1 (1) сигналу задання швидкості обертання (ω'з1) ведучого двигуна (2), одночасному надходженні від датчика (4) до блока (10-2) інформації про фактичне значення швидкості обертання (ω1), формуванні блоком (10-2) сигналу задання веденого приводу з урахуванням заданого значення співвідношення швидкостей (і), порівнянні блоком порівняння (10-3) заданого (ωз2) та фактичного значення (ω2) швидкостей веденого приводу, формуванні блоком 10-3 скорегованого сигналу задання швидкості обертання (ω'з2) веденого двигуна АД2 (6) на ПЧ2 (5), чим досягається узгоджене обертання кінематичних ланок технологічного механізму. 40 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 45 50 Комплекс для задання режимів роботи взаємопов'язаних частотно-регульованих електроприводів, який містить дводвигунний частотно-регульований асинхронний електропривод для керування виконавчими механізмами, датчики зворотних зв'язків, мікропроцесорну систему керування для забезпечення синхронної роботи електроприводів, який відрізняється тим, що додатково обладнаний задавальним пристроєм, блоком керування ведучого двигуна; вхід якого з'єднано з виходом задавального пристрою, а вихід з'єднано з входом перетворювача частоти ведучого двигуна, блоком задання швидкості веденого двигуна, один з входів якого з'єднано з виходом задавального пристрою, а інший вхід - з виходом датчика ведучого двигуна, блоком порівняння, один з входів якого підключено до виходу блока задання швидкості, інший вхід - до виходу датчика веденого двигуна, а отриманий вихідний сигнал блока порівняння подається на вхід перетворювача частоти веденого двигуна. 2 UA 82160 U Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for setting modes of interlocked variable-frequency electric drives
Автори англійськоюHladyr Andrii Ivanovych, Khrebtova Oksana Anatoliivna, Leschuk Oleksii Yuriiovych, Pshenyshnyi Viktor Viktorovych, Artemenko Liudmyla Leonidivna
Назва патенту російськоюКомплекс для задания режимов работы взаимосвязанных частотно-регулируемых электроприводов
Автори російськоюГладыр Андрей Иванович, Хребтова Оксана Анатольевна, Лещук Алексей Юрьевич, Пшенишный Виктор Викторович, Артеменко Людмила Леонидовна
МПК / Мітки
МПК: H02P 25/00, H02P 5/00
Мітки: електроприводів, частотно-регульованих, режимів, комплекс, взаємопов'язаних, задання, роботи
Код посилання
<a href="https://ua.patents.su/5-82160-kompleks-dlya-zadannya-rezhimiv-roboti-vzaehmopovyazanikh-chastotno-regulovanikh-elektroprivodiv.html" target="_blank" rel="follow" title="База патентів України">Комплекс для задання режимів роботи взаємопов’язаних частотно-регульованих електроприводів</a>
Стенд для випробування частотно-регульованих асинхронних двигунів
Номер патенту: 80282
Опубліковано: 27.05.2013
Автор: Бондаренко Юрій Сергійович
МПК: G01R 31/34
Мітки: стенд, випробування, асинхронних, двигунів, частотно-регульованих
Формула / Реферат:
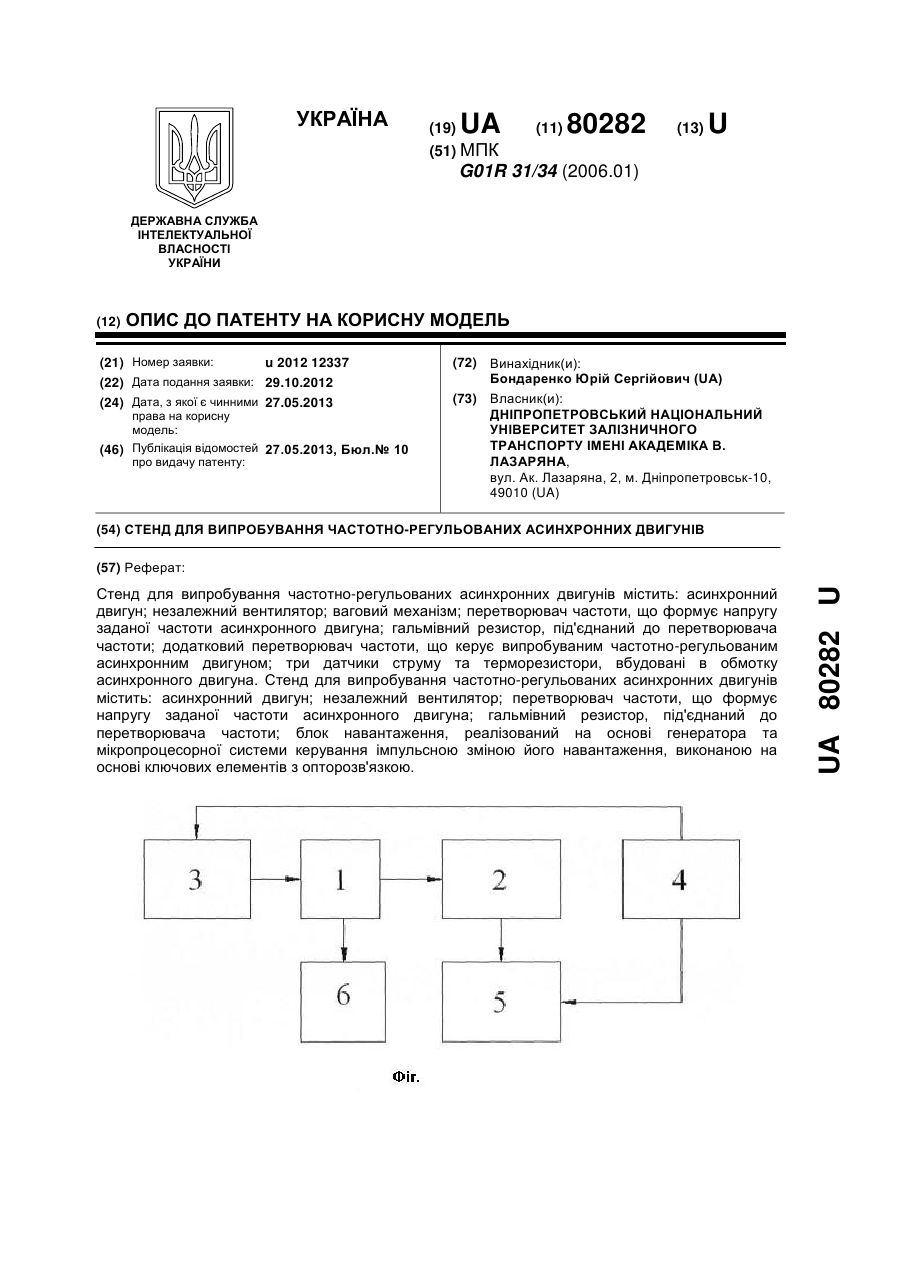
Стенд для випробування частотно-регульованих асинхронних двигунів, що містить: асинхронний двигун; незалежний вентилятор; ваговий механізм; перетворювач частоти, що формує напругу заданої частоти асинхронного двигуна; гальмівний резистор, під'єднаний до перетворювача частоти; додатковий перетворювач частоти, що керує випробуваним частотно-регульованим асинхронним двигуном; три датчики струму та терморезистори, вбудовані в обмотку...
Спосіб регулювання струму навантаження трифазного перетворювача для частотно-керованих електроприводів змінного струму

Номер патенту: 79056
Опубліковано: 10.04.2013
Автор: Кулагін Дмитро Олександрович
МПК: H02M 7/12
Мітки: трифазного, електроприводів, струму, регулювання, частотно-керованих, навантаження, змінного, спосіб, перетворювача
Формула / Реферат:
Спосіб регулювання струму навантаження трифазного перетворювача для частотно-керованих електроприводів змінного струму, який полягає у тому, що вимірюють струм навантаження, визначають сигнал помилки, як різницю заданого та виміряного значень струму, інтегрують сигнал помилки, формують імпульси керування вентилями перетворювача з кутом керування, пропорційним сумі сигналів результату інтегрування і значення помилки, який відрізняється тим,...
Спосіб узгодження режимів роботи електроприводів реверсивного прокатного стану з вертикальними та горизонтальними валками при одночасній прокатці металу у вертикальних та горизонтальних валках
Номер патенту: 23186
Опубліковано: 19.05.1998
Автори: Дишлевич Ігор Йосипович, Штехно Олег Миколайович, Калабухов Віктор Іванович, Феофілактов Андрій Вікторович, Світличний Олексій Васильович, Кузьмін Олександр Вікторович, Тилик Василь Трохимович, Мовшович Вілорд Соломонович, Будаква Сергій Анатолійович, Ситий Володимир Іванович
МПК: B21B 37/00
Мітки: прокатного, роботи, валках, валками, прокатці, узгодження, вертикальних, металу, одночасній, режимів, горизонтальними, горизонтальних, електроприводів, вертикальними, спосіб, реверсивного, стану
Формула / Реферат:
Способ согласования режимов работы электроприводов реверсивного прокатного стана с вертикальными и горизонтальными валками при одновременной прокатке металла в вертикальных и горизонтальных валках, включающий определение среднего значения статического тока электропривода вертикальных валков при движении металла от вертикальных валков к горизонтальным до захвата металла валками последующей горизонтальной клети, поддержание статического тока...
Пристрій автоматичного захисту групи електродвигунів від аварійних режимів роботи
Номер патенту: 67971
Опубліковано: 12.03.2012
Автори: Квітка Сергій Олексійович, Квітка Олександр Сергійович, Вовк Олександр Юрійович
МПК: H02H 7/09
Мітки: захисту, пристрій, групи, автоматичного, аварійних, роботи, електродвигунів, режимів
Формула / Реферат:
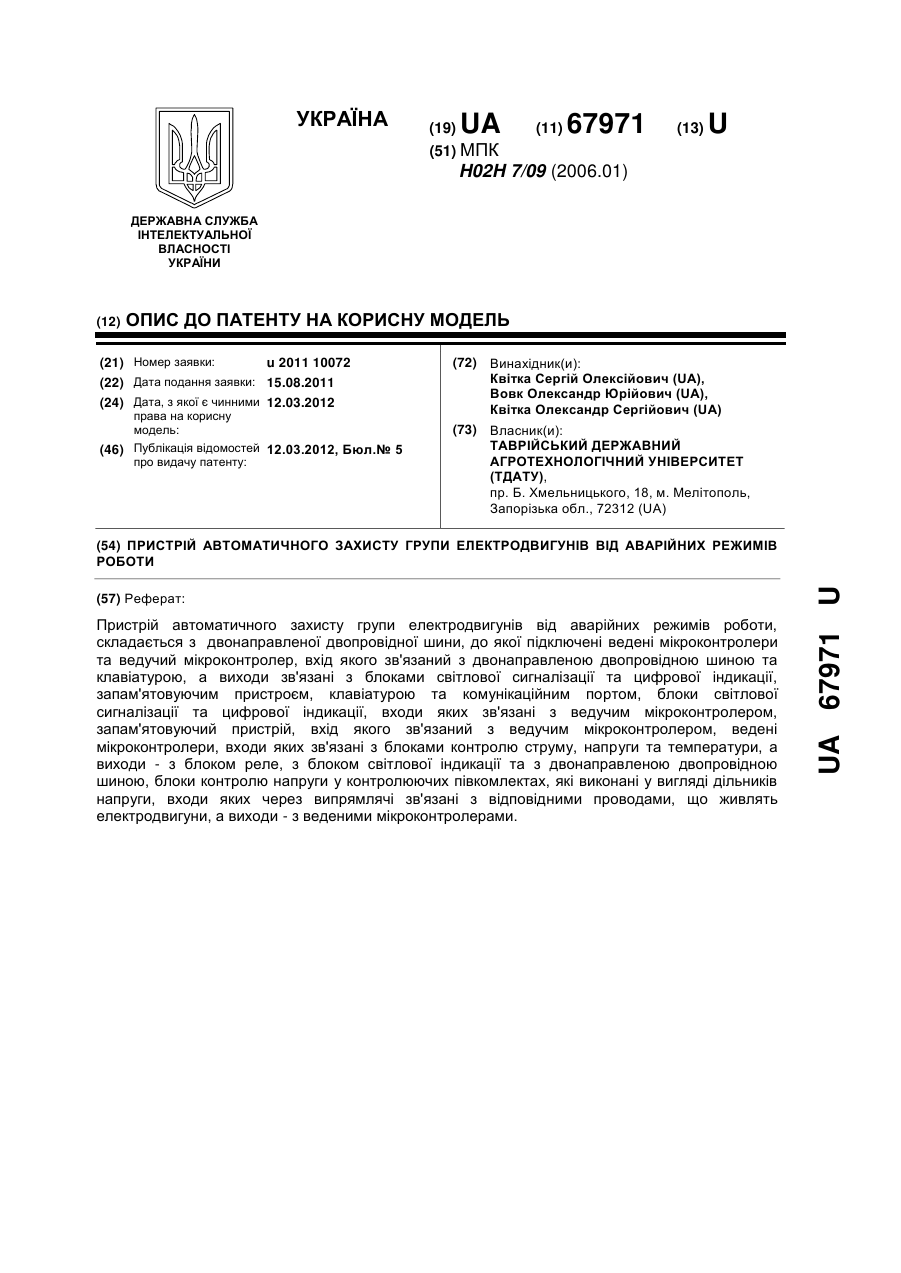
Пристрій автоматичного захисту групи електродвигунів від аварійних режимів роботи, який складається з ведучого мікроконтролера, блоків світлової сигналізації та цифрової індикації, блока живлення, запам'ятовуючого пристрою, клавіатури, комунікаційного порту, двонаправленої двопровідної шини, а також з контролюючих півкомплектів електродвигунів, кожен з яких містить ведений мікроконтролер, блок контролю струму, блок контролю напруги, блок...
Система запуску та контролю режимів роботи синхронного двигуна групи г-д
Номер патенту: 50114
Опубліковано: 15.10.2002
Автори: Чорний Олексій Петрович, Пасмурских Олександр Олексійович, Вошун Олексій Миколайович, Родькін Дмитро Йосипович, Зубова Олена Іванівна, Марченко Андрій Бронікович
МПК: H02P 7/06
Мітки: роботи, запуску, групи, г-д, система, режимів, синхронного, контролю, двигуна
Формула / Реферат:
1. Система запуску та контролю режиму роботи синхронного двигуна групи Г-Д, яка вмикає синхронний двигун з вимикачем у мережі статора, збуджувачем у мережі збудження та генератором постійного струму на валу, джерела живлення якірної мережі генератора з комутуючим апаратом, контакторний апарат в мережі живлення двигуна, перетворювачі для живлення обмотки збудження та якірної мережі на період пуску, яка відрізняється тим, що для спрощення...
Попередній патент: Силова установка літального апарата
Наступний патент: Пристрій керування режимами різання металорізального верстату
Випадковий патент: Спосіб визначення працездатності сліпих