Сервопривід
Номер патенту: 82435
Опубліковано: 25.07.2013
Автори: Бейлін Георгій Володимирович, Петренко Сергій Юрійович, Сидоренко Юрій Григорович
Формула / Реферат
Сервопривід, що містить основу, на якій встановлено багатофазний електродвигун з ротором на постійних магнітах і статором, а також блок керування та датчик положення, призначений для його з'єднання з виконавчим елементом повороту чи обертання, вихід датчика з'єднаний із входом блока керування, вихід якого підключений до статора електродвигуна, а вал ротора призначений для його кінематичного сполучення з виконавчим елементом повороту чи обертання, який відрізняється тим, що багатофазний електродвигун виконаний у вигляді багатороторного дугостаторного сервомотора з магнітним зачепленням роторів, який має щонайменше два багатополюсних ротори у формі циліндрів, осі обертання яких паралельні та оснащені датчиками положення ротора дугостаторні обмотки, робоча поверхня кожної з яких має форму циліндричної дуги, що встановлена із однаковим зазором до бокової циліндричної поверхні відповідного ротора та частково охоплює його, між суміжними роторами є зазор, значення якого визначено можливістю взаємодії магнітних полів сусідніх роторів для передачі та утворення обертального моменту на сусідній ротор, вихід датчика положення кожного ротора з'єднаний із входом блока керування, а виходи блока керування підключені до відповідних дугостаторних багатофазних обмоток.
Текст
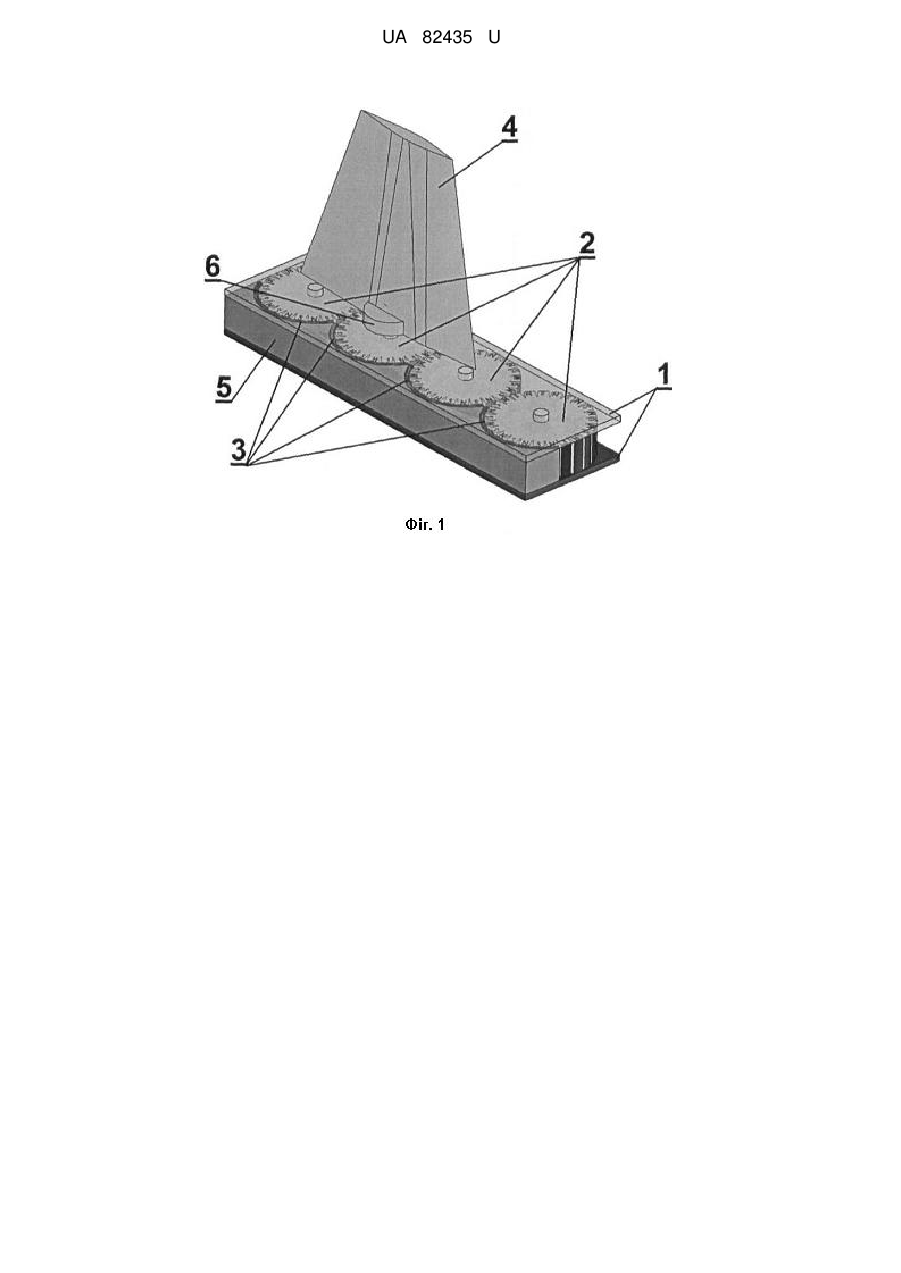
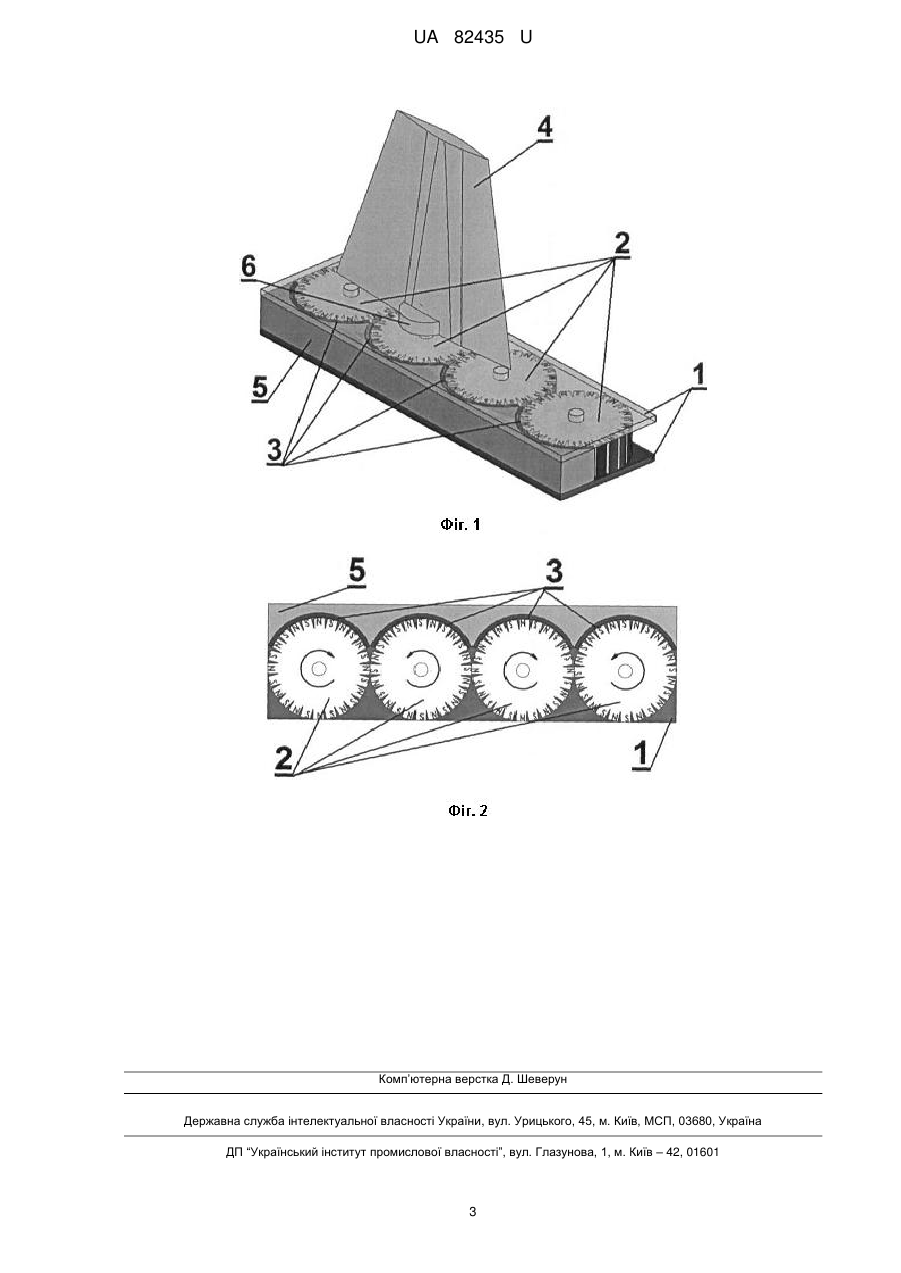
Реферат: Сервопривід містить основу, на якій встановлено багатофазний електродвигун з ротором на постійних магнітах і статором, а також блок керування та датчик положення, вихід датчика з'єднаний із входом блока керування, вихід якого підключений до статора електродвигуна. Багатофазний електродвигун виконаний у вигляді багатороторного дугостаторного сервомотора з магнітним зачепленням роторів, який має щонайменше два багатополюсних ротори у формі циліндрів, осі обертання яких паралельні та оснащені датчиками положення ротора дугостаторні обмотки, робоча поверхня кожної з яких має форму циліндричної дуги, що встановлена із однаковим зазором до бокової циліндричної поверхні відповідного ротора та частково охоплює його. Між суміжними роторами є зазор. Вихід датчика положення кожного ротора з'єднаний із входом блока керування, а виходи блока керування підключені до відповідних дугостаторних багатофазних обмоток. UA 82435 U (12) UA 82435 U UA 82435 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до конструкцій електричних машин, зокрема до таких, що мають більше одного ротора і статора, а саме - до конструкції багатороторного дугостаторного сервомотора з магнітним зачепленням роторів. Пропонований пристрій може бути застосований у авіації - для керування аеродинамічними поверхнями, рулем висоти літака тощо, у металорізальних верстатах з ЧПУ, у роботах і т.п. Сервопривід - це слідкуючий привід, тобто привід, на вхід якого подають завдання, наприклад щодо здійснення виконавчим елементом обороту на певний кут, а на виході отримують поворот ротора з виконавчим елементом на заданий кут. Найбільш близьким до пропонованого за кількістю суттєвих ознак є сервопривід, що містить багатофазний електродвигун на постійних магнітах з ротором і статором, блок керування та датчик положення, призначений для його прямого з'єднання з виконавчим органом повороту чи обертання, вихід датчика з'єднаний із входом блока керування, вихід якого підключений до статора електродвигуна, а вал ротора призначений для його прямого кінематичного сполучення з виконавчим елементом повороту чи обертання [інформація з сайта http://home.roboticlab.eu/ru/examples/motor/servo]. До конструкції згаданого сервопривода входить датчик положення вихідного вала, електродвигун і редуктор. При застосуванні такого серовопривода, наприклад у літальних апаратах, зокрема у системі керування рулем повороту, висоти, закрилків тощо, до його складу, як правило, входить високооборотний сервомотор та редуктора і датчик положення вихідного валу. Редуктор застосовують для отримання потрібного обертального моменту на вихідному валу сервопривода. Виготовлення ж високоточного редуктора без люфтів, здатного надійно працювати тривалий час в умовах роботи літального апарату є досить складною проблемою навіть для сучасного високотехнологічного виробництва. У основу пропонованої корисної моделі поставлена задача створення такого сервопривода, який би був простішим і більш надійним. Поставлена задача вирішується за рахунок створення умов для зменшення сил тертя між конструктивними елементами сервопривода, які взаємодіють під час його роботи і можливості безпосереднього зв'язку вала сервопривода з виконавчим елементом повороту чи обертання. Пропонований, як і відомий сервопривід, містить багатофазний електродвигун на постійних магнітах з ротором і статором, блок керування та датчик положення, призначений для його прямого з'єднання з виконавчим елементом повороту чи обертання, вихід датчика з'єднаний із входом блока керування, вихід якого підключений до статора електродвигуна, а вал ротора призначений для його прямого кінематичного сполучення з виконавчим елементом повороту чи обертання, а, відповідно до пропонованої корисної моделі, багатофазний електродвигун виконаний у вигляді багатороторного дугостаторного сервомотора з магнітним зачепленням роторів, який містить, щонайменше два багатополюсних, з постійними магнітами, ротори, осі обертання яких паралельні і кожний виконаний у формі циліндра, та дугостаторні обмотки, кожна з яких має форму циліндричної дуги, оснащену датчиками положення ротора і встановлена із зазором до бокової циліндричної поверхні відповідного ротора та частково охоплює його. Між суміжними роторами є зазор, значення якого визначено можливістю взаємодії магнітних полів сусідніх роторів на кшталт зубчастої передачі (для передачі та складання обертального моменту). Вихід датчика положення ротора з'єднаний із входом блока керування, а виходи блока керування підключені до відповідних дугостаторних багатофазних обмоток, що діють як єдиний багатофазний електродвигун. Пропонований сервопривід, отримуючи на вході електричний управляючий сигнал з певними параметрами у режимі реального часу, здійснює на виході поворот ротора із кінематично сполученим з ним виконавчим елементом на певний кут і фіксує такий стан. Завдяки невеликому зазору між суміжними роторами, значення якого визначено можливістю взаємодії магнітних полів сусідніх роторів, останні взаємодіють між собою подібно зубчастій передачі і один ротор передає, а другий приймає визначений конструктивними параметрами роторів обертальний момент, але без контактування суміжних роторів і без виникнення сил тертя між ними. Таким чином, пропонований серворпривід дозволяє працювати без редуктора з можливістю безпосереднього зв'язку вихідного вала сервопривода з виконавчим елементом повороту чи обертання, а тому є простішим і надійнішим за сервопривід-прототип. Суть пропонованого сервопривода показана на схематичних кресленнях. На фіг. 1 - показано загальний вигляд пропонованого сервопривода. На фіг. 2 - показано вид зверху на пропонований сервопривід. Як приклад, показано сервопривід, призначений для керування рулем повороту літака. Сервопривід містить основу 1, на якій встановлений багатофазний електродвигун з ротором 2 на постійних магнітах і статором. Блок керування (не показано) встановлений за межами 1 UA 82435 U 5 10 15 20 25 30 35 основи 1. Багатофазний електродвигун виконаний у вигляді багатороторного дугостаторного сервомотора з магнітним зачепленням роторів містить чотири багатополюсних ротори 2 і чотири - по числу роторів - дугостаторних обмотки 3. Кожний ротор 2 має форму циліндра. Осі обертання роторів 2 паралельні. Вал, щонайменше одного ротора 2, призначений для його кінематичного сполучення з виконавчим елементом повороту чи обертання - рулем повороту літака 4. Робоча поверхня кожної з дугостаторних обмоток 3 має форму циліндричної дуги, що встановлена на статорі 5 із однаковим зазором до бокової циліндричної поверхні відповідного ротора 2 та частково охоплює його. Між суміжними роторами 2 є зазор, значення якого визначено можливістю взаємодії магнітних полів сусідніх роторів для передачі та утворення обертального моменту на сусідній ротор 2 і складає десятки мікрон. При цьому довжина кола ротора 2 дорівнює цілому числу довжин дуги дугостаторної обмотки 3, яка його охоплює, а коефіцієнт електромеханічної редукції обчислюють, як співвідношення згаданих довжин. Сервопривід оснащений також датчиком 6 положення ротора. Вихід датчика 6 положення ротора з'єднаний із входом блока керування, а виходи блока керування підключені до відповідних дугостаторних багатофазних обмоток 3. Як датчик 6 може бути використаний датчик Холла або абсолютний енкодер, наприклад з числа наведених на сайті http://www.prst.ru/ugol.html Як блок керування у пропонованому сервоприводі може бути використаний керуючий комп'ютер зі встановленим відповідним програмним статком, наприклад, описаний на сайті: http://www.liebherr.com/CP/ru-RU/products_cp.wfw/id-17087-0 Пропонований сервопривід працює так. З блока керування на кожну із дугостаторних багатофазних обмоток 3 надходить певний електричний сигнал. Згаданий сигнал ініціює поворот кожного вала роторів 2, що охоплені дугостаторними обмотками 3 на певний кут. При цьому кожний ротор 2 виконує поворот з визначеною блоком керування швидкістю і крутним моментом, а ротор, вал якого з'єднаний з виконавчим елементом повороту чи обертання здійснює поворот і змушує у режимі реального часу здійснити поворот руля повороту літака 4 з моментом, що дорівнює сумі моментів всіх роторів. Завдяки магнітному зв'язку між роторами 2 швидкість обертання роторів є номінальною, а обертальний момент на будь-якому із валів роторів 2 дорівнює сумі моментів роторів. По суті пропонований сервопривід є багатофазним електродвигуном з керуванням від датчиків Холла та подвійною електромеханічною редукцією. Перший ступінь електромеханічної редукції досягається шляхом вибору кількості постійних магнітів на роторі 2 та його діаметра. При цьому зниження номінальної частоти обертання ротора, дозволяє підвищити момент навантаження на валу ротора 2. Другий ступінь електромеханічної редукції досягається складанням обертових моментів окремих роторів 2 за рахунок використання сил магнітного зчеплення між ними. Простота та висока надійність пропонованого пристрою дозволяють використовувати його увідповідальних механізмах, зокрема у системах керування літальних апаратів. 40 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 45 50 55 Сервопривід, що містить основу, на якій встановлено багатофазний електродвигун з ротором на постійних магнітах і статором, а також блок керування та датчик положення, призначений для його з'єднання з виконавчим елементом повороту чи обертання, вихід датчика з'єднаний із входом блока керування, вихід якого підключений до статора електродвигуна, а вал ротора призначений для його кінематичного сполучення з виконавчим елементом повороту чи обертання, який відрізняється тим, що багатофазний електродвигун виконаний у вигляді багатороторного дугостаторного сервомотора з магнітним зачепленням роторів, який має щонайменше два багатополюсних ротори у формі циліндрів, осі обертання яких паралельні та оснащені датчиками положення ротора дугостаторні обмотки, робоча поверхня кожної з яких має форму циліндричної дуги, що встановлена із однаковим зазором до бокової циліндричної поверхні відповідного ротора та частково охоплює його, між суміжними роторами є зазор, значення якого визначено можливістю взаємодії магнітних полів сусідніх роторів для передачі та утворення обертального моменту на сусідній ротор, вихід датчика положення кожного ротора з'єднаний із входом блока керування, а виходи блока керування підключені до відповідних дугостаторних багатофазних обмоток. 2 UA 82435 U Комп’ютерна верстка Д. Шеверун Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюServo drive
Автори англійськоюSidorenko Yurii Hryhorovych, Beilin Heorhii Volodymyrovych, Petrenko Sergii Uriovych
Назва патенту російськоюСервопривод
Автори російськоюСидоренко Юрий Григорьевич, Бейлин Георгий Владимирович, Петренко Сергей Юриевич
МПК / Мітки
МПК: G05D 13/00, H02K 16/00
Мітки: сервопривід
Код посилання
<a href="https://ua.patents.su/5-82435-servoprivid.html" target="_blank" rel="follow" title="База патентів України">Сервопривід</a>
Вітродвигун
Номер патенту: 34147
Опубліковано: 25.07.2008
Автори: Цяпко Микола Федорович, Горбунов Олександр Дмитрович, Глущенко Олена Леонідівна
МПК: F03D 3/02
Мітки: вітродвигун
Формула / Реферат:
Вітродвигун, що містить основу, ротор, виконаний у вигляді встановленої на основі центральної стійки й циліндрів, установлених з можливістю обертання навколо своїх поздовжніх осей і повороту у вертикальних площинах, який відрізняється тим, що він додатково оснащений допоміжним лопатевим вітродвигуном, а вали роторів циліндрів і вал допоміжного лопатевого вітродвигуна обладнані зубчатими колесами, які знаходяться у зчепленні.
Стрілочний електропривід
Номер патенту: 101436
Опубліковано: 25.03.2013
Автори: Блиндюк Василь Степанович, Бабаєв Михайло Михайлович, Ананьєва Ольга Михайлівна, Богатир Юлія Іванівна
МПК: B61L 5/00
Мітки: електропривід, стрілочний
Формула / Реферат:
Стрілочний електропривід, що містить безконтактний керований електродвигун, який з′єднаний з блоком керування, до складу якого входять пристрій обмеження струму, вузол обмеження часу роботи на рівні, що забезпечує переведення стрілки, датчик рівня напруги живлення, датчик струму і пристрій діагностики, а також містить редуктор з фрикційною муфтою та шибером, який з′єднаний з керованим електродвигуном, автоперемикач та датчик...
Електродвигун сухомліна

Номер патенту: 37039
Опубліковано: 10.11.2008
Автор: Сухомлин Микола Арсентійович
МПК: H02K 16/00
Мітки: сухомліна, електродвигун
Формула / Реферат:
Електродвигун, що має ротор, статор, струмопідвід, щітки, які сполучаються з контактними кільцями, який відрізняється тим, що статор закріплений в підшипниках і виконаний з можливістю обертання навколо ротора (нерухомого, або такого, що обертається).
Косарка

Номер патенту: 1541
Опубліковано: 16.12.2002
Автор: Карпенко Михайло Іванович
МПК: A01D 34/00
Мітки: косарка
Формула / Реферат:
Косарка, яка включає скошувальні ротори, закріплені на рамі, та приєднані до них бокові ротори, яка відрізняється тим, що бокові ротори встановлені на балках, які зв'язані із рамою через механізм фіксованого повороту в площині обертання роторів, і мають механізм позиційного переміщення вздовж балок.
Стрілочний електропривід
Номер патенту: 68099
Опубліковано: 12.03.2012
Автори: Блиндюк Василь Степанович, Бабаєв Михайло Михайлович, Ананьєва Ольга Михайлівна, Богатир Юлія Іванівна
МПК: B61L 5/00
Мітки: стрілочний, електропривід
Формула / Реферат:
Стрілочний електропривід, що містить безконтактний керований електродвигун, до складу якого входить блок управління з пристроєм обмеження струму, вузлом обмеження часу роботи на рівні, що забезпечує переведення стрілки, датчиком рівня напруги живлення, датчиком струму і пристроєм діагностики, редуктор з фрикційною муфтою, автоперемикач, шибер, датчик положення ротора встановлені в корпусі, який відрізняється тим, що в нього введені блок...
Попередній патент: Засіб бассараба г.о. для герметичного закупорювання ємностей з рідинами і напоями
Наступний патент: Спосіб реабілітації дітей з екстрасистолічною аритмією
Випадковий патент: Гірка настойка "віскі-золотий"