Захват для круглих лісоматеріалів
Номер патенту: 83443
Опубліковано: 10.09.2013
Автори: Гарболінський Віктор Миколайович, Рябошапка Сергій Олександрович, Шаповалов Сергій Федорович, Снігир Володимир Сергійович
Формула / Реферат
Захват для круглих лісоматеріалів, що включає щелепи, траверсу, тяги та приводний механізм, який відрізняється тим, що містить з'єднану із щелепами за допомогою тяг нерухому раму, на якій встановлено електропривод, та рухому траверсу, що зв'язана з електроприводом та з'єднана зі щелепами, змикання та розмикання яких забезпечується переміщенням траверси по двох жорстко закріплених паралельних напрямних, що з'єднують траверсу з нерухомою рамою.
Текст
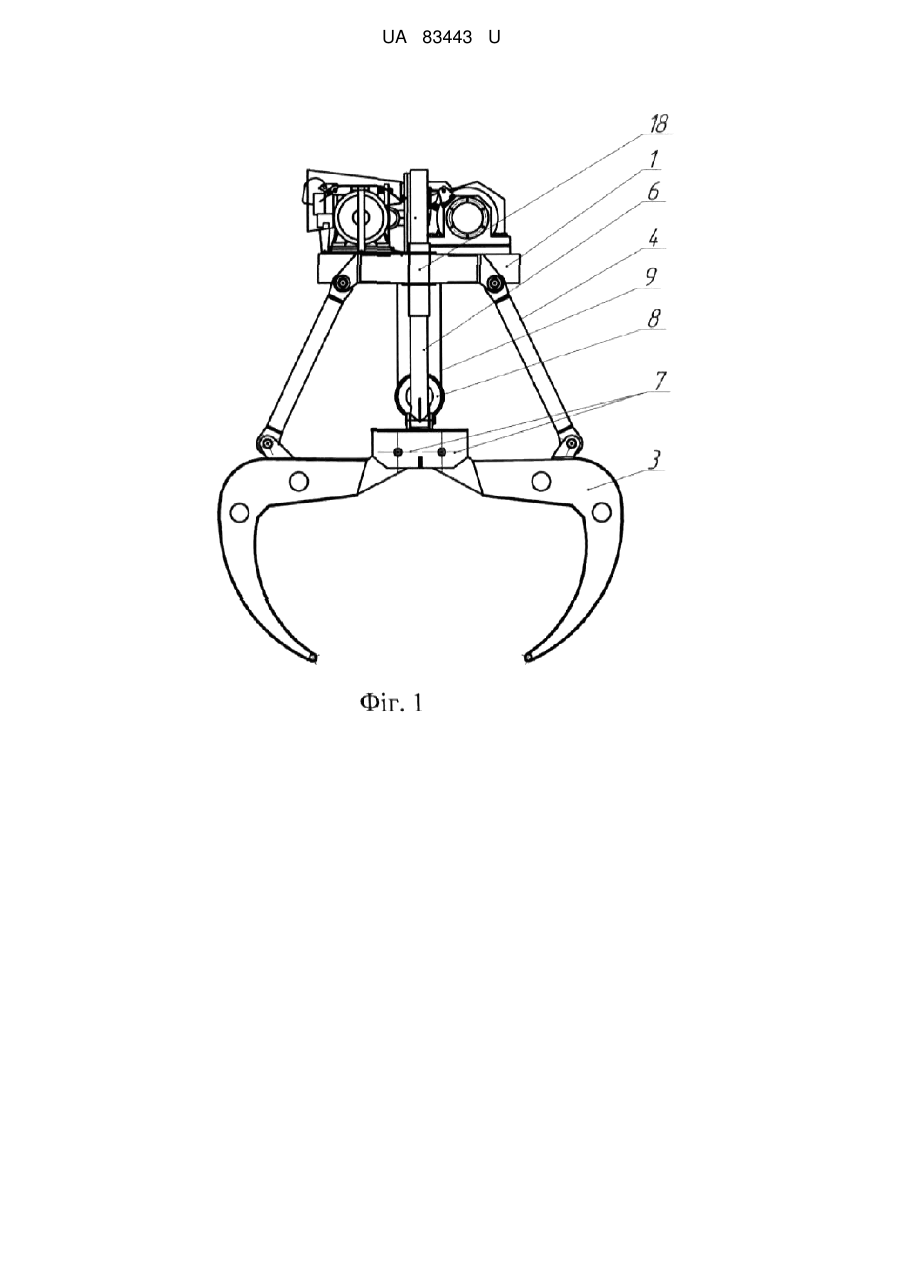
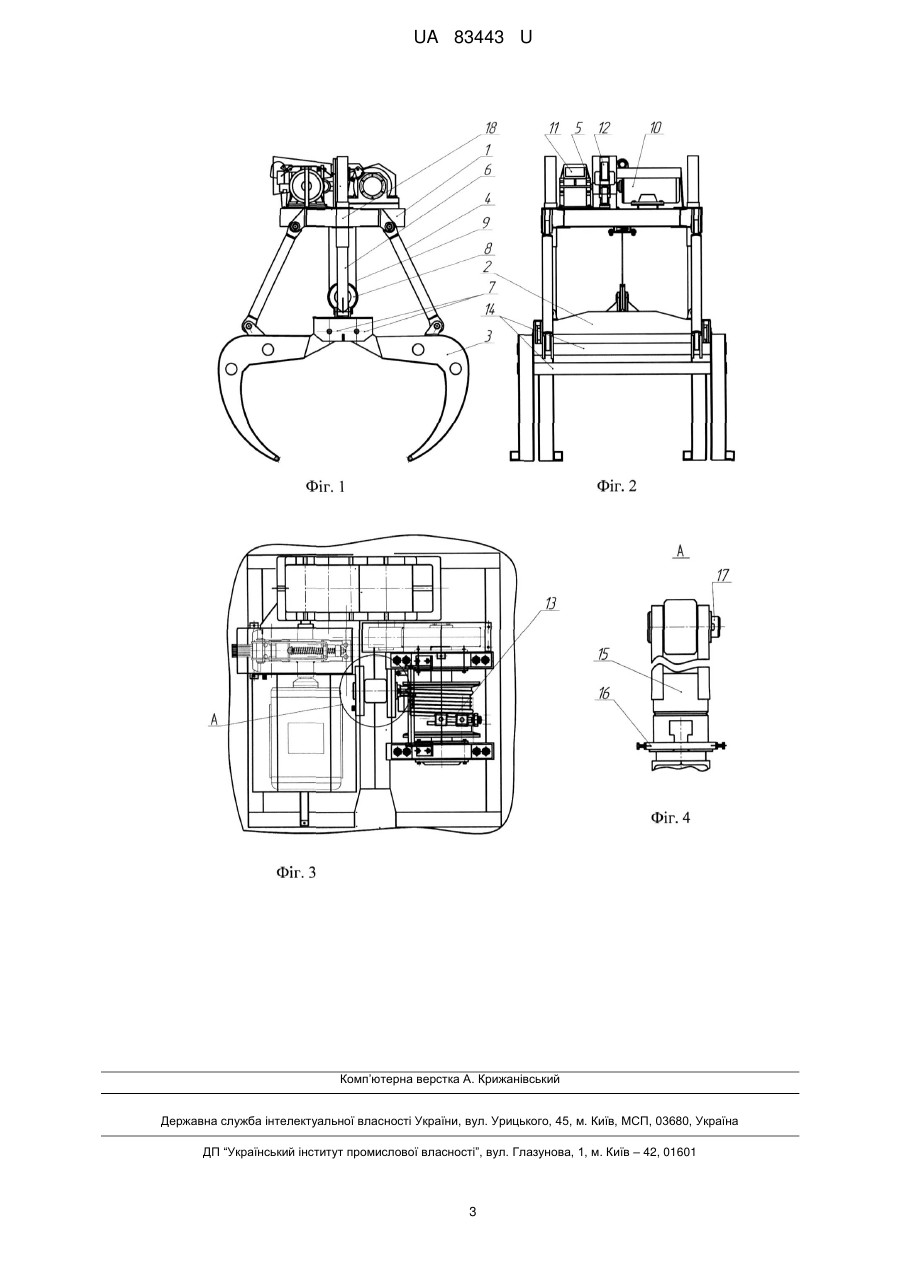
Реферат: Захват для круглих лісоматеріалів містить щелепи, траверсу, тяги, приводний механізм, нерухому раму, електропривод, рухому траверсу, паралельні напрямні. UA 83443 U (54) ЗАХВАТ ДЛЯ КРУГЛИХ ЛІСОМАТЕРІАЛІВ UA 83443 U UA 83443 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до вантажозахватних механізмів підйомно-транспортних машин, які встановлюються на електрокозлові, баштові і мостові крани, автокрани і крани на залізничному ходу. Захват для круглих лісоматеріалів (далі - захват) призначений для розвантаження та завантаження лісоматеріалами залізничних піввагонів, вагонів-лісовозів і платформ. Захватом можна вивантажувати і завантажувати як штабелі колод деревини, так і одиночні колоди довжиною до 6,5 м. Захват може використовуватися для навантаження, розвантаження та переміщення колод лісоматеріалів на підприємствах лісної та деревообробної промисловості, в будівництві та інших галузях промисловості. Відомі електромоторні грейфери для круглих лісоматеріалів різних модифікацій (Таубер Б.А., "Грейферные механизмы", Москва, Машиностроение, 1967 г.), які навішуються на гак підіймальної машини та містять приводний механізм з електродвигуном, канат та щелепи, а також проміжні вузли та деталі (вали, ланцюги, пружини, блоки), що забезпечують шляхом передавання на канат через блоки зусилля, необхідного для замикання щелеп та підіймання колод. Суттєвим недоліком таких грейферів є складність конструкції, велика металоємність та необхідність виконання ручних робіт для направлення щелеп на штабель з колодами. Найближчим аналогом захвата для круглих лісоматеріалів, що заявляється, вибраним як прототип, є грейферний механізм для захвату колод (патент України № 72631 на корисну модель), який містить траверсу з тягами, робочий гідроциліндр та дві щелепи, кожна з яких складається з двох частин (основи та носка), з'єднаних між собою шарнірно, в якому положення носка щелепи регулюється тросом, який через направляючі блоки з'єднується з приводним механізмом. Недоліком цієї конструкції є енергоємність та складність конструкції через наявність двох приводів - гідравлічного, який забезпечує підіймання-опускання грейферного механізму та рух щелеп, і електромеханічного, яким регулюється положення носка щелепи, для забезпечення роботи механізму такої конструкції кожна із щелеп повинна бути обладнана окремими блоками з канатом, що збільшує габарити та масу грейферного механізму і, як правило, призводить до збільшення собівартості конструкції, а крім того, потребує використання вантажопідіймальної машини (крана або навантажувача) збільшеної вантажопідйомності. Шарнірне з'єднання щелепи з носком та застосування троса для приводу носка зменшує надійність грейферного механізму через можливе заклинювання та перетирання тросу під час завантаження та розвантаження колод. Процес перевантаження колод цим грейферним механізмом трудомісткій та має низьку продуктивність. В основу корисної моделі поставлено задачу спрощення конструкції механізму для захвату круглих лісоматеріалів, підвищення його надійності та продуктивності. Поставлена задача вирішується тим, що захват для круглих лісоматеріалів, який містить щелепи, тяги та приводний механізм, згідно з корисною моделлю, включає з'єднану із щелепами за допомогою тяг нерухому раму, на якій встановлено електропривод, та рухому траверсу, що зв'язана з електроприводом та з'єднана зі щелепами, змикання та розмикання яких забезпечується переміщенням траверси по двох жорстко закріплених паралельних направляючих, що з'єднують траверсу з нерухомою рамою. Спрощення конструкції досягнуто завдяки виключенню електроприводу для керування рухом носків щелеп. У запропонованому захваті для круглих лісоматеріалів завдяки конструкції щелеп та взаємозв'язку щелеп з електроприводом через рухому траверсу і тяги забезпечується робота захвату, тобто підіймання-опускання захвату та розмикання-змикання щелеп, за наявністю лише одного приводу. Надійність захвата забезпечується подвійною системою захисту від перенавантажень: автоматичним вимикачем, який запобігає перевантаженню електродвигуна, та кінцевим вмикачем, який спрацьовує при перевищенні допустимого навантаження каната електроприводу. Конструкція захвату забезпечує високу продуктивність перевантаження круглих лісоматеріалів. Конструкція захвата представлена на кресленнях, де: фіг. 1 – загальний вигляд захвата, фіг. 2 – вигляд захвата збоку; фіг. 3 – вигляд захвата зверху; фіг. 4 – підвіска (вузол А на фіг. 3). Захват (фіг.1) складається з основних вузлів: нерухомої рами 1, рухомої траверси 2, двох щелеп 3, чотирьох тяг 4, що з'єднуються за допомогою направляючих 6, осей 7, блока 8, каната 9. На нерухомій рамі 1 розташований електропривод, який включає муфту 5, електродвигун 10, редуктор 11, гальмо 12 (фіг.2), барабан 13 (фіг.3) та закріплена підвіска 15 із запобіжним кільцем 16 та віссю 17 (фіг.4). Нерухома рама 1 з'єднана зі щелепами 3 за допомогою тяг 4. 1 UA 83443 U 5 10 15 20 25 30 35 На рухомій траверсі 2 на осях 7 закріплені дві щелепи 3. Кожна із щелеп являє собою жорстку конструкцію, що складається з двох кликів серповидної форми, зварених між собою перемичками 14. Траверса 2 та нерухома рама 1 з'єднані між собою двома паралельно розташованими напрямними 6. Напрямні 6 жорстко прикріплені на траверсі та разом із траверсою вільно переміщаються відносно нерухомої рами по направляючих втулках 18, що приварені з обох сторін нерухомої рами. Застосування в конструкції напрямних забезпечує плавне, без перекосів та заїдань, переміщення траверси, а шарнірне з'єднання щелеп за допомогою тяг - синхронне розмикання та змикання щелеп під час переміщення траверси. Підвіска 15 кріпиться до нерухомої рами 1 через Т-подібний паз та закріплюється запобіжним кільцем 16. Захват для круглих лісоматеріалів працює наступним чином. Захват за допомогою підвіски 15 навішується на гак вантажопідіймального крана та силовим кабелем з'єднується з електричною шафою керування, що розташована в кабіні крана. Встановлення підвіски на гак крана здійснюється шляхом введення гака крана між щоками підвіски та фіксацією гака за допомогою осі 17. Для вивантаження лісоматеріалів із піввагона або при їх завантаженні у піввагон захват за допомогою крана встановлюється безпосередньо над піввагоном або штабелем лісоматеріалів, що перевантажуються. Керування захватом здійснюється з кабіни крана за допомогою шафи керування, яка обладнана відповідними кнопками. Для розмикання щелеп натисканням кнопки (ВІДКР) в кабіні крана, вмикається електродвигун 10, який через муфту 5 та редуктор 11 приводить в рух барабан 13, на якому закріплений канат 9. При обертанні барабана канат розмотується і рухома траверса 2 разом із щелепами 3 по напрямних 6 опускається до низа, що призводить до розкриття щелеп. При повному розкриванні щелеп (величина розмаху щелеп обумовлена внутрішніми розмірами піввагона і згідно з запропонованою корисною моделлю, становить 2650 мм) спрацьовує кінцевий вимикач, який вимикає електродвигун. Після того, як щелепами захоплено колоди, натисканням кнопки (ЗАКР) електродвигун 10 вмикається і приводить в рух барабан 13, канат 9 починає намотуватися на барабан, внаслідок чого траверса 2 підіймається вверх. При переміщенні траверси 2 вверх щелепи 3 змикаються, затискаючи при цьому колоди. Після досягнення щелепами заданого зусилля спрацьовує кінцевий вимикач обмеження навантаження каната, який вимикає електродвигун 10, при цьому спрацьовує гальмо 12, яке надійно фіксує силовий привід та запобігає самовільному розмиканню щелеп. Переміщення захвата з лісоматеріалами на місце вивантаження забезпечується переміщенням каретки крана, керування якою здійснюється стаціонарним обладнанням крана. Запропонований захват для круглого лісоматеріалу має просту і надійну конструкцію та забезпечує високу продуктивність під час перенавантаження круглих лісоматеріалів. Дослідний зразок захвата для круглих лісоматеріалів виготовлений державним підприємством "Вінницятрансприлад" та пройшов експлуатаційні випробування на залізничних станціях при розвантаженні піввагонів з круглими лісоматеріалами. 40 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 45 Захват для круглих лісоматеріалів, що включає щелепи, траверсу, тяги та приводний механізм, який відрізняється тим, що містить з'єднану із щелепами за допомогою тяг нерухому раму, на якій встановлено електропривод, та рухому траверсу, що зв'язана з електроприводом та з'єднана зі щелепами, змикання та розмикання яких забезпечується переміщенням траверси по двох жорстко закріплених паралельних напрямних, що з'єднують траверсу з нерухомою рамою. 2 UA 83443 U Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Автори англійськоюShapovalov Serhii Fedorovych, Harbolinskyi Viktor Mykolaiovych
Автори російськоюШаповалов Сергей Федорович, Гарболинский Виктор Николаевич
МПК / Мітки
МПК: B66C 3/16
Мітки: круглих, лісоматеріалів, захват
Код посилання
<a href="https://ua.patents.su/5-83443-zakhvat-dlya-kruglikh-lisomaterialiv.html" target="_blank" rel="follow" title="База патентів України">Захват для круглих лісоматеріалів</a>
Вантажозахватний пристрій для круглих лісоматеріалів
Номер патенту: 69443
Опубліковано: 25.04.2012
Автори: Лимар Петро Володимирович, Ловейкін Вячеслав Сергійович
МПК: B66C 3/20
Мітки: круглих, вантажозахватний, лісоматеріалів, пристрій
Формула / Реферат:
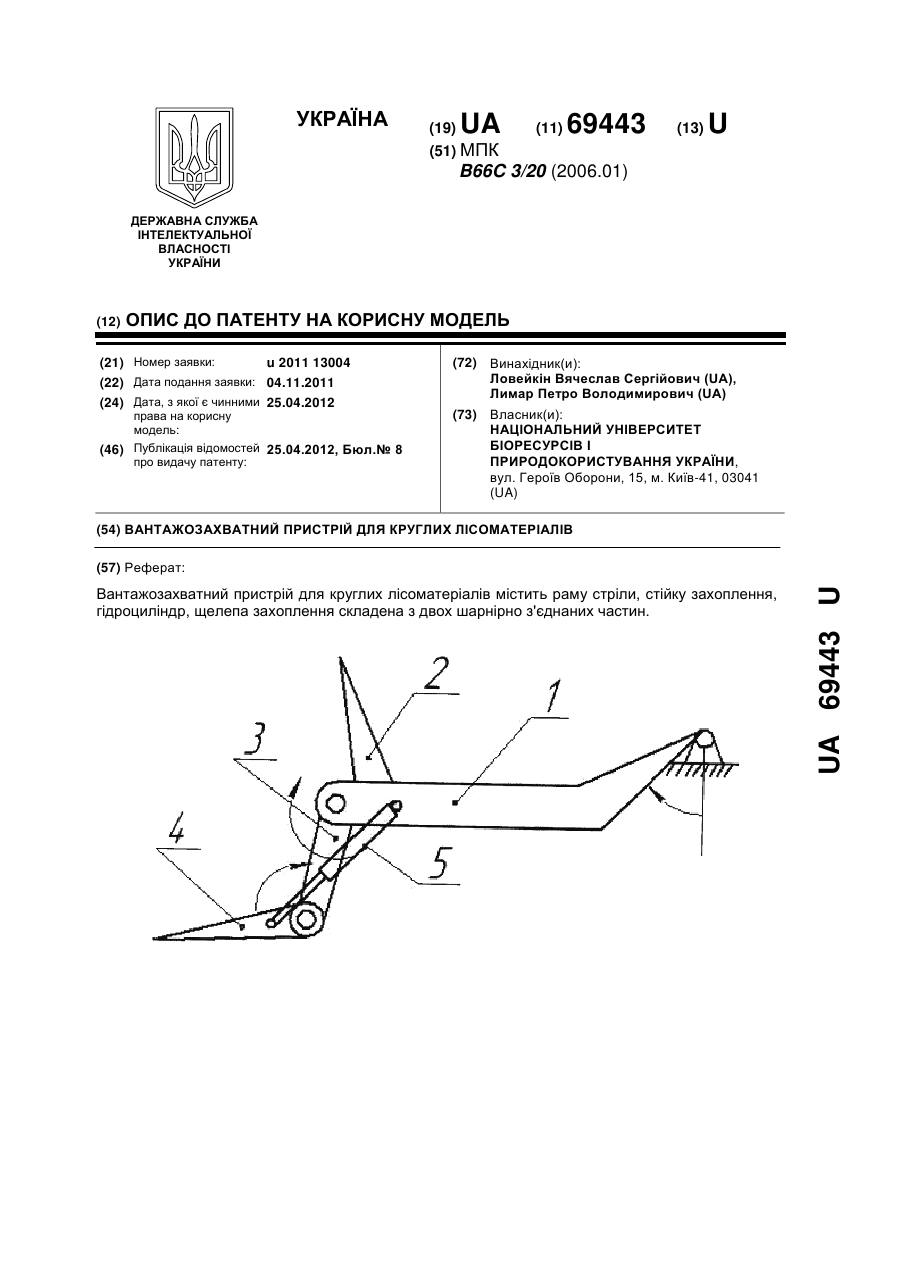
Вантажозахватний пристрій для круглих лісоматеріалів, що містить раму стріли, щелепу з приводом захоплення, стійку захоплення, який відрізняється тим, що щелепа захоплення складається з двох шарнірно з'єднаних частин: передньої частини щелепи і задньої частини щелепи, до того ж передня частина щелепи з'єднана з стрілою за допомогою гідроциліндра.
Грейфер для круглих лісоматеріалів
Номер патенту: 68741
Опубліковано: 10.04.2012
Автори: Ловейкін Вячеслав Сергійович, Лимар Петро Володимирович
МПК: B66C 3/18
Мітки: лісоматеріалів, круглих, грейфер
Формула / Реферат:
Грейфер для круглих лісоматеріалів, що містить траверсу з тягами, робочий гідроциліндр, додатковий гідроциліндр з керуючим пристроєм, підключеним паралельно до основного робочого гідроциліндра, дві щелепи, кожна з яких складається з двох частин, з'єднаних між собою шарнірно-пружними елементами, який відрізняється тим, що замість робочого гідроциліндру встановлено основний лінійний двигун, з'єднання двох частин щелеп виконано за допомогою...
Канатний строп-контейнер для круглих лісоматеріалів
Номер патенту: 55043
Опубліковано: 10.12.2010
Автори: Бегеба Володимир Миколайович, Турко Василь Миколайович, Омелянчук Вадим Володимирович
МПК: B66C 1/12
Мітки: канатний, лісоматеріалів, круглих, строп-контейнер
Формула / Реферат:
Канатний строп-контейнер для круглих лісоматеріалів, який містить несучий канат, вантажозатискуючу петлю і механізм фіксації сформованого пакета лісоматеріалів, який відрізняється тим, що фіксація (замикання) строп-контейнера здійснюється автоматично за допомогою замка, який складається з корпуса і рухомого ексцентрика, всередині яких є жолоб з профілем каната і які з'єднані між собою шарнірним і пружним елементом.
Агрегатний автопоїзд для самозавантаження довгомірних круглих лісоматеріалів
Номер патенту: 53494
Опубліковано: 15.01.2003
Автори: Бегеба Владислав Володимирович, Бегеба Володимир Миколайович
МПК: B60P 3/40
Мітки: круглих, автопоїзд, довгомірних, агрегатний, лісоматеріалів, самозавантаження
Формула / Реферат:
Агрегатний автопоїзд для самозавантаження довгомірних круглих матеріалів, що включає тягач з причепом, лебідку з канатно-блочною системою, коники з відкидними стійками, який відрізняється тим, що відкидні стійки обладнані рольгангами, а завантаження агрегатної машини здійснюють з допомогою поліспастних строп.
Вимірювач об’єму круглих лісоматеріалів
Номер патенту: 72249
Опубліковано: 10.08.2012
Автори: Білинський Йосип Йосипович, Соколовський Олексій Вячеславович, Крисак Тетяна Миколаївна
МПК: G01N 21/01, G01N 33/46
Мітки: об'єму, вимірювач, круглих, лісоматеріалів
Формула / Реферат:
Вимірювач об'єму круглих лісоматеріалів, що містить системи відеокамер, блок попередньої обробки, персональний комп'ютер, USB порти, який відрізняється тим, що у ньому містяться системи формування патернів з каналом далекометрування, причому системи відеокамер з'єднані з блоком попередньої обробки, блок попередньої обробки та системи формування патернів з каналом далекометрування з'єднані з персональним комп'ютером за допомогою USB порта,...
Попередній патент: Спосіб визначення пошкодженої фази в комбінованих електричних мережах з ізольованою нейтраллю
Наступний патент: Збірна залізобетонна будівельна колона
Випадковий патент: Спосіб ребросклеювання смуг шпону