Спосіб розподілу сил коріолісових

Формула / Реферат
1. Спосіб розподілу сил коріолісових шляхом обертання робочого тіла (1) навколо локальної осі (2), переміщення робочого тіла по замкнутій траєкторії (3) навколо осі примусової прецесії (4) та узгодження швидкості ![]() переміщення робочого тіла (1) навколо осі (4) примусової прецесії зі швидкістю
переміщення робочого тіла (1) навколо осі (4) примусової прецесії зі швидкістю ![]() обертання кожного робочого тіла (1) навколо локальної осі (2), який відрізняється тим, що робоче тіло (1) розподіляють вздовж локальної осі (2) на
обертання кожного робочого тіла (1) навколо локальної осі (2), який відрізняється тим, що робоче тіло (1) розподіляють вздовж локальної осі (2) на ![]() частин (
частин (![]() ) та узгоджують масу відповідної частини (
) та узгоджують масу відповідної частини (![]() ) робочого тіла з відстанню
) робочого тіла з відстанню ![]() від центра (6) мас відповідної частини (
від центра (6) мас відповідної частини (![]() ) робочого тіла до осі (4) примусової прецесії, де
) робочого тіла до осі (4) примусової прецесії, де ![]() - ціле число, що знаходиться в межах від 1 до
- ціле число, що знаходиться в межах від 1 до ![]() .
.
2. Спосіб за п. 1, який відрізняється тим, що масу ![]() відповідної частини (5) робочого тіла (1) визначають із співвідношення:
відповідної частини (5) робочого тіла (1) визначають із співвідношення: ![]() , де
, де ![]() - сумарна маса робочого тіла,
- сумарна маса робочого тіла, ![]() - відстань від центра мас (6) відповідної частини (5) робочого тіла до осі (4) примусової прецесії,
- відстань від центра мас (6) відповідної частини (5) робочого тіла до осі (4) примусової прецесії, ![]() - кількість частин робочого тіла (1).
- кількість частин робочого тіла (1).
3. Спосіб за п. 1, який відрізняється тим, що обертову енергію ![]() відповідної частини (
відповідної частини (![]() ) робочого тіла (1) узгоджують з кінетичною енергією прецесії
) робочого тіла (1) узгоджують з кінетичною енергією прецесії ![]() тієї ж частини (
тієї ж частини (![]() ) робочого тіла (1).
) робочого тіла (1).
4. Спосіб за п. 1, який відрізняється тим, що обертову енергію ![]() відповідної частини (
відповідної частини (![]() ) робочого тіла (1) узгоджують з обертовою енергією прецесії
) робочого тіла (1) узгоджують з обертовою енергією прецесії ![]() таким чином, що підтримують співвідношення
таким чином, що підтримують співвідношення ![]() , де
, де ![]() - кутова швидкість примусової прецесії робочого тіла (1).
- кутова швидкість примусової прецесії робочого тіла (1).
5. Спосіб за п. 1, який відрізняється тим, що діаметр ![]() відповідної частини (
відповідної частини (![]() ) робочого тіла (1) визначають із співвідношення
) робочого тіла (1) визначають із співвідношення ![]() , де
, де ![]() - внутрішній діаметр відповідної частини (
- внутрішній діаметр відповідної частини (![]() ) робочого тіла,
) робочого тіла, ![]() відстань від центра мас (
відстань від центра мас (![]() ) відповідної частини робочого тіла до осі примусової прецесії (4),
) відповідної частини робочого тіла до осі примусової прецесії (4), ![]() - кутова швидкість обертання робочого тіла навколо локальної осі (2),
- кутова швидкість обертання робочого тіла навколо локальної осі (2), ![]() - кутова швидкість прецесії робочого тіла.
- кутова швидкість прецесії робочого тіла.
6. Спосіб за п. 1, який відрізняється тим, що робоче тіло (1) виконують складеним з паралельно розташованих дисків (![]() ), що встановлені на спільному валу (9).
), що встановлені на спільному валу (9).
7. Спосіб за п. 1, який відрізняється тим, що як робоче тіло (1) використовують маховик в формі гантелі.
8. Спосіб за п. 1, який відрізняється тим, що максимальний діаметр (15) робочого тіла (1) менший від його розміру ![]() (14) вздовж локальної осі (2).
(14) вздовж локальної осі (2).
9. Спосіб за п. 1, який відрізняється тим, що примусову прецесію робочого тіла (1) виконують в розрідженому газовому середовищі або в вакуумі.
Текст
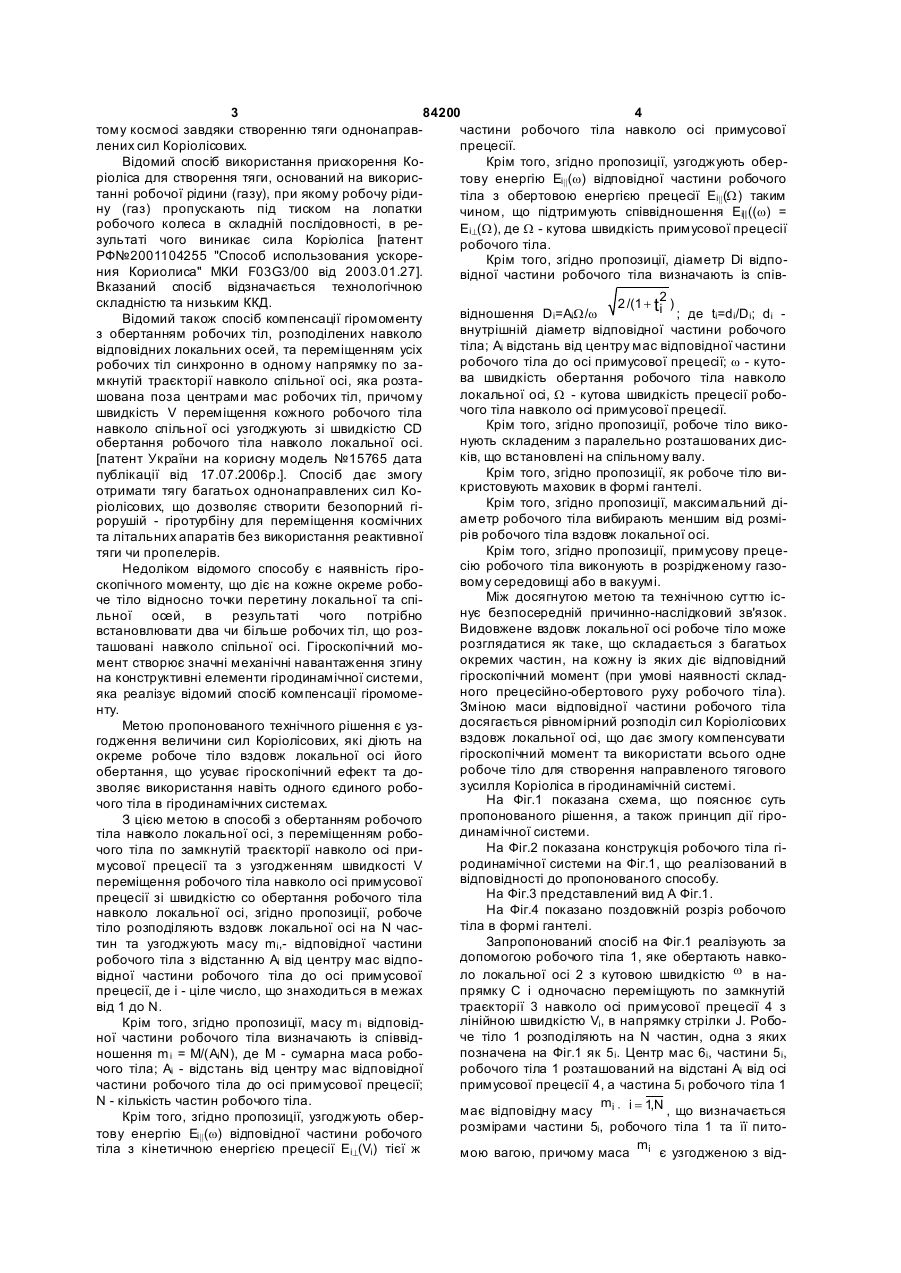
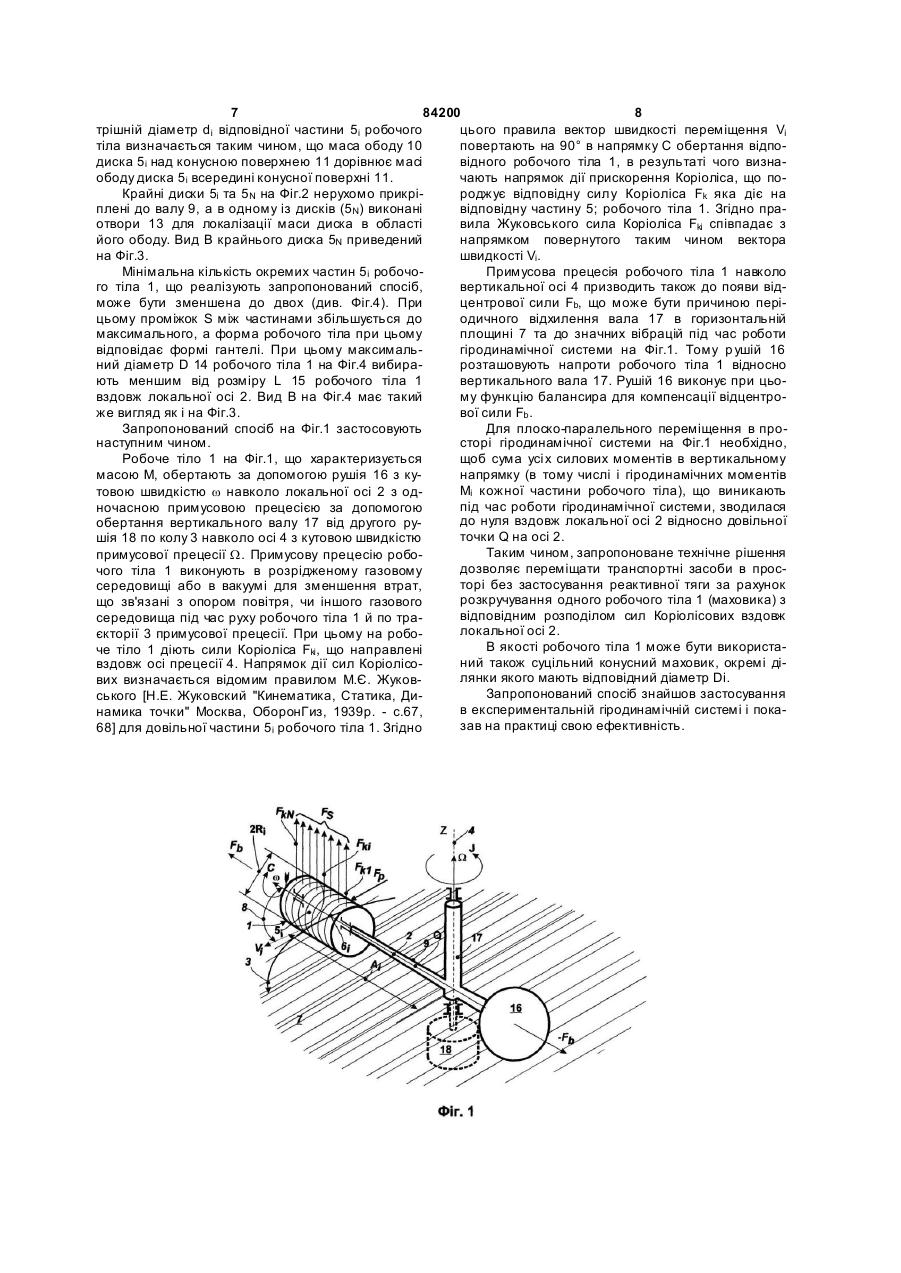
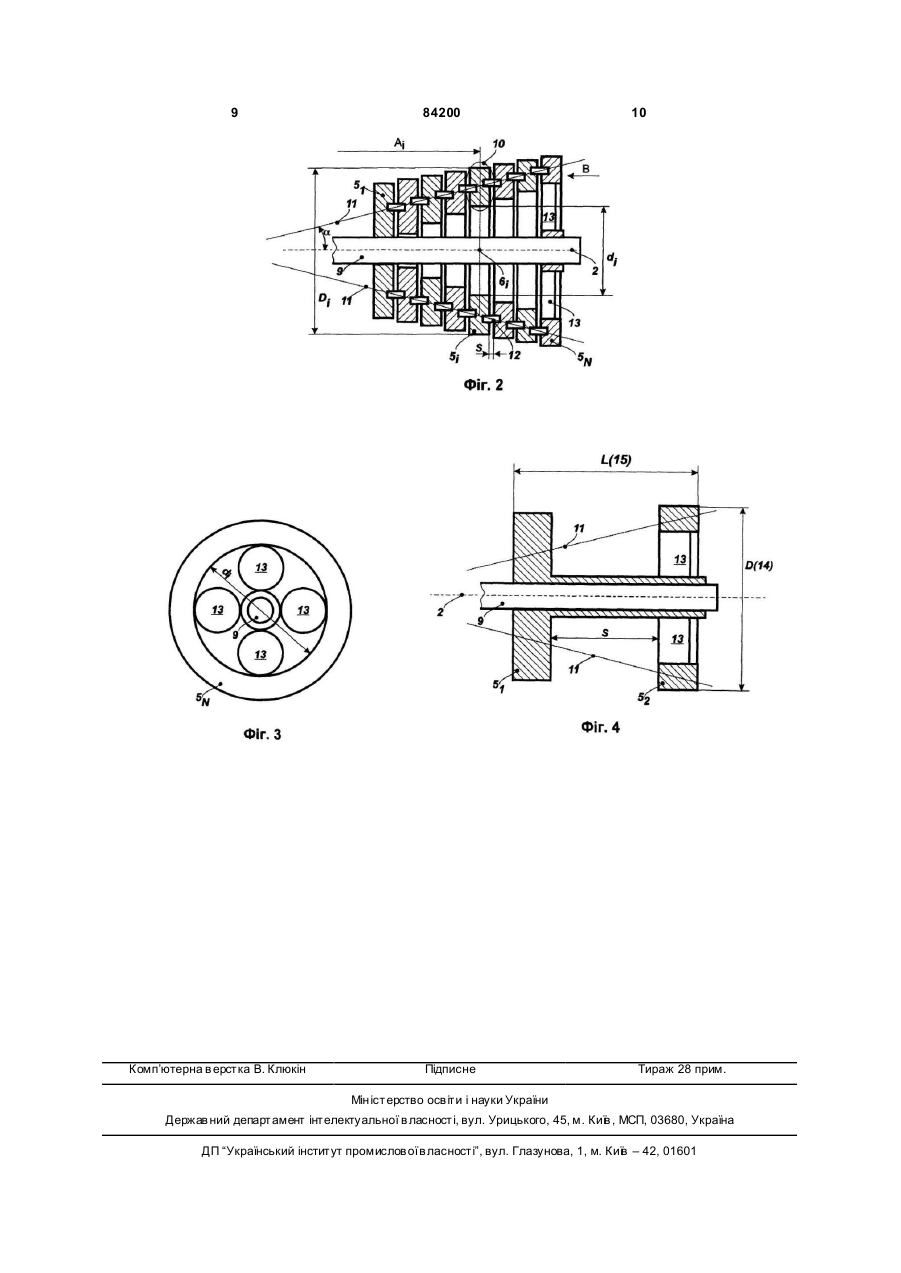
1. Спосіб розподілу сил коріолісових шляхом 5. Спосіб за п. 1, який відрізняє ться тим, що діаобертання робочого тіла (1) навколо локальної осі метр Di відповідної частини ( 5i ) робочого тіла (1) (2), переміщення робочого тіла по замкнутій траєквизначають із співвідношення торії (3) навколо осі примусової прецесії (4) та узгодження швидкості Vi переміщення робочого тіла= A W / w 2 / æ1+ t2; ö , де d - внутрішній діаметр Di ç i i i ÷ è ø (1) навколо осі (4) примусової прецесії зі швидкістю w обертання кожного робочого тіла (1) навколо відповідної частини ( 5i ) робочого тіла, Ai відстань локальної осі (2), який відрізняється тим, що ровід центра мас ( 6i ) відповідної частини робочого боче тіло (1) розподіляють вздовж локальної осі тіла до осі примусової прецесії (4), w - кутова (2) на N частин ( 5i ) та узгоджують масу відповідшвидкість обертання робочого тіла навколо локаної частини ( 5i ) робочого тіла з відстанню Ai від льної осі (2), W - кутова швидкість прецесії робочого тіла. центра (6) мас відповідної частини ( 5i ) робочого 6. Спосіб за п. 1, який відрізняється тим, що ротіла до осі (4) примусової прецесії, де i - ціле чисбоче тіло (1) виконують складеним з паралельно ло, що знаходиться в межах від 1 до N . розташованих дисків ( 5i ), що встановлені на спі2. Спосіб за п. 1, який відрізняється тим, що масу льному валу (9). mi відповідної частини (5) робочого тіла (1) визна7. Спосіб за п. 1, який відрізняється тим, що як чають із співвідношення: mi = M / (AiN) , де M - суробоче тіло (1) використовують маховик в формі гантелі. марна маса робочого тіла, Ai - відстань від 8. Спосіб за п. 1, який відрізняється тим, що макцентра мас (6) відповідної частини (5) робочого симальний діаметр (15) робочого тіла (1) менший тіла до осі (4) примусової прецесії, N - кількість від його розміру L (14) вздовж локальної осі (2). частин робочого тіла (1). 9. Спосіб за п. 1, який відрізняється тим, що при3. Спосіб за п. 1, який відрізняється тим, що обемусову прецесію робочого тіла (1) виконують в ртову енергію Ei|| (w) відповідної частини ( 5i ) роборозрідженому газовому середовищі або в вакуумі. чого тіла (1) узгоджують з кінетичною енергією C2 2 (19) 1 3 84200 4 тому космосі завдяки створенню тяги однонаправчастини робочого тіла навколо осі примусової лених сил Коріолісових. прецесії. Відомий спосіб використання прискорення КоКрім того, згідно пропозиції, узгоджують оберріоліса для створення тяги, оснований на використову енергію Еі|| (w) відповідної частини робочого танні робочої рідини (газу), при якому робочу рідитіла з обертовою енергією прецесії Ei|| (W) таким ну (газ) пропускають під тиском на лопатки чином, що підтримують співвідношення Ei|| ((w) = робочого колеса в складній послідовності, в реEi^(W), де W - кутова швидкість примусової прецесії зультаті чого виникає сила Коріоліса [патент робочого тіла. РФ№2001104255 "Способ использования ускореКрім того, згідно пропозиції, діаметр Di відпония Кориолиса" МКИ F03G3/00 від 2003.01.27]. відної частини робочого тіла визначають із співВказаний спосіб відзначається технологічною складністю та низьким ККД. 2 /(1 + t 2 ) i ; де ti=di/Di; di відношення Di=AiW/w Відомий також спосіб компенсації гіромоменту внутрішній діаметр відповідної частини робочого з обертанням робочих тіл, розподілених навколо тіла; Ai відстань від центру мас відповідної частини відповідних локальних осей, та переміщенням усіх робочого тіла до осі примусової прецесії; w - куторобочих тіл синхронно в одному напрямку по зава швидкість обертання робочого тіла навколо мкнутій траєкторії навколо спільної осі, яка розталокальної осі, W - кутова швидкість прецесії робошована поза центрами мас робочих тіл, причому чого тіла навколо осі примусової прецесії. швидкість V переміщення кожного робочого тіла Крім того, згідно пропозиції, робоче тіло виконавколо спільної осі узгоджують зі швидкістю CD нують складеним з паралельно розташованих дисобертання робочого тіла навколо локальної осі. ків, що встановлені на спільному валу. [патент України на корисну модель №15765 дата Крім того, згідно пропозиції, як робоче тіло випублікації від 17.07.2006р.]. Спосіб дає змогу кристовують маховик в формі гантелі. отримати тягу багатьох однонаправлених сил КоКрім того, згідно пропозиції, максимальний діріолісових, що дозволяє створити безопорний гіаметр робочого тіла вибирають меншим від розмірорушій - гіротурбіну для переміщення космічних рів робочого тіла вздовж локальної осі. та літальних апаратів без використання реактивної Крім того, згідно пропозиції, примусову прецетяги чи пропелерів. сію робочого тіла виконують в розрідженому газоНедоліком відомого способу є наявність гіровому середовищі або в вакуумі. скопічного моменту, що діє на кожне окреме робоМіж досягнутою метою та технічною суттю ісче тіло відносно точки перетину локальної та спінує безпосередній причинно-наслідковий зв'язок. льної осей, в результаті чого потрібно Видовжене вздовж локальної осі робоче тіло може встановлювати два чи більше робочих тіл, що розрозглядатися як таке, що складається з багатьох ташовані навколо спільної осі. Гіроскопічний моокремих частин, на кожну із яких діє відповідний мент створює значні механічні навантаження згину гіроскопічний момент (при умові наявності складна конструктивні елементи гіродинамічної системи, ного прецесійно-обертового руху робочого тіла). яка реалізує відомий спосіб компенсації гіромомеЗміною маси відповідної частини робочого тіла нту. досягається рівномірний розподіл сил Коріолісових Метою пропонованого технічного рішення є узвздовж локальної осі, що дає змогу компенсувати годження величини сил Коріолісових, які діють на гіроскопічний момент та використати всього одне окреме робоче тіло вздовж локальної осі його робоче тіло для створення направленого тягового обертання, що усуває гіроскопічний ефект та дозусилля Коріоліса в гіродинамічній системі. зволяє використання навіть одного єдиного робоНа Фіг.1 показана схема, що пояснює суть чого тіла в гіродинамічних системах. пропонованого рішення, а також принцип дії гіроЗ цією метою в способі з обертанням робочого динамічної системи. тіла навколо локальної осі, з переміщенням робоНа Фіг.2 показана конструкція робочого тіла гічого тіла по замкнутій траєкторії навколо осі природинамічної системи на Фіг.1, що реалізований в мусової прецесії та з узгодженням швидкості V відповідності до пропонованого способу. переміщення робочого тіла навколо осі примусової На Фіг.3 представлений вид А Фіг.1. прецесії зі швидкістю со обертання робочого тіла На Фіг.4 показано поздовжній розріз робочого навколо локальної осі, згідно пропозиції, робоче тіла в формі гантелі. тіло розподіляють вздовж локальної осі на N часЗапропонований спосіб на Фіг.1 реалізують за тин та узгоджують масу mi,- відповідної частини допомогою робочого тіла 1, яке обертають навкоробочого тіла з відстанню Aі від центру мас відполо локальної осі 2 з кутовою швидкістю w в навідної частини робочого тіла до осі примусової прецесії, де і - ціле число, що знаходиться в межах прямку С і одночасно переміщують по замкнутій від 1 до N. траєкторії 3 навколо осі примусової прецесії 4 з лінійною швидкiстю Vi, в напрямку стрілки J. РобоКрім того, згідно пропозиції, масу m і відповідче тіло 1 розподіляють на N частин, одна з яких ної частини робочого тіла визначають із співвідпозначена на Фіг.1 як 5i. Центр мас 6i, частини 5i, ношення m i = M/(AiN), де M - сумарна маса робочого тіла; Ai - відстань від центру мас відповідної робочого тіла 1 розташований на відстані Аi від осі частини робочого тіла до осі примусової прецесії; примусової прецесії 4, а частина 5i робочого тіла 1 N - кількість частин робочого тіла. m має відповідну масу i , i = 1,N , що визначається Крім того, згідно пропозиції, узгоджують оберрозмірами частини 5i, робочого тіла 1 та її питотову енергію Еі|| (w) відповідної частини робочого m тіла з кінетичною енергією прецесії Ei^(Vi) тієї ж мою вагою, причому маса i є узгодженою з від 5 84200 6 станню Аi. Траєкторія 3 розташована в одній плоТак, наприклад, для тонкостінного кільця, що щині 7 і являє собою в більшості випадків коло. має радіус Ri, момент інерції визначається як При складному прецесійно-обертовому рухові Iі½½ = 0.5*mi*Ri2, частини 5i робочого тіла 1 зі швидкістю Vi відносно тобто для приведеного прикладу k=0.5. осі прецесії 4 виникає сила Коріоліса Fki, яка виЗ іншого боку, рух тієї ж самої частини 5i робозначається відомим співвідношенням: чого тіла 1 характеризується кінетичною енергією Fki = 2m i w VisinФ, Ei^(Vi) примусової прецесії, що визначається як Ei^(Vi) =0.5m i*Vi2, (5) де Ф = 90° - кут 8 між вектором w обертання робочого тіла 1 та вектором швидкості Vі, переміабо обертовою енергією прецесії щення частини 5i, робочого тіла 1 навколо осі Ei^(W)=0.5m i*Ai2W 2, (6) примусової прецесії 4. (враховуючи той факт, що Vi=AiW, де W - кутоЯкщо врахувати той факт, що Vі = АіW,де W ва швидкість переміщення відповідної частини кутова швидкість переміщення робочого тіла 1 робочого тіла 1 навколо осі примусової прецесії 4). навколо осі примусової прецесії 4, то отримаємо Згідно проведених експериментів автором значення сили Коріоліса для його частини 5і отримана закономірність, яка свідчить про той факт, що максимальна ефективність трансформу(1) Fki = 2mi wA i W, i = 1 N, , вання сили прецесії Fp, яка перетворюється в тяЗгідно з одним із варіантів пропонованого рігове зусилля Коріоліса Fk, досягається при умові шення кожна частина 5і робочого тіла 1 створює балансу обох енергій, тобто ідентичну силу Коріоліса Fki, тобто Eі½½(w) Ei^(Vi), або Eі½½(w) = Ei^(W), Fki = F k2 =…= F ki =...= F kN , що свідчить про наявність ефекту резонансу що дозволяє забезпечити рівномірний розпоінерційних сил в гіродинамічних системах. діл сил Коріолісових вздовж локальної осі 2 та Якщо врахувати співвідношення (3)...(6), отрикомпенсувати гіроскопічний момент, що створюмаємо ється відповідними частинами 5i робочого тіла 1. 0.5Iі½½w2=0.5m i*Vi2, Для забезпечення такого рівномірного розпоабо 0.5k*m i*Ri2 w2=0.5m i*Vi2 = 0.5m i*Ai2W 2, mi звідки виникає співвідношення між геометричділу сил Коріолісових масу відповідної частини ними параметрами Ri,Ai гіродинамiчної системи, робочого тіла визначають із співвідношення інерційними параметрами m i, та її динамічними m i = M/(AiN), (2) де: M - сумарна маса робочого тіла 1; Аi - відхарактеристиками w, W, а саме: стань від центру мас 6i відповідної частини 5i роw = Vi / Ri k = WA i / Ri k , або (6) бочого тіла 1 до осі 4 примусової прецесії; N - кількість частин 5i робочого тіла 1. Ri = Ai W / w 1/ k. (7) mi Якщо підставити значення (2) для маси чаВиходячи із співвідношення (7) діаметр стини 5i робочого тіла 1 в вираз (1), то отримаємо: Di(Di=2Ri) відповідної частини 5i робочого тіла 1 Fki = 2m iw АiW = 2kM/(AiN) w AiW = 2kMwW/N = 2 D A W / w 2 / 1 + t1 t = di / Di const, незалежно від індексу і, тобто на кожну часвизначають як i i ; де i тину 5i робочого тіла 1 діє ідентична сила Коріоліdi безрозмірний параметр; - внутрішній діаметр са Fk, що визначається як: Fk = 2kMwW/N, а сумарвідповідної частини робочого тіла; Аi відстань від не тягове зусилля FS, що створюється складним центру мас 5i відповідної частини робочого тіла 1 рухом робочого тіла 1, визначається як FS =NFk, до осі примусової прецесії 4; w - кутова швидкість або Fs =2МwW. обертання робочого тіла 1 навколо локальної осі На Фіг.1 чітко видно, що сила Коріоліса FS є 2, W - кутова швидкість переміщення робочого тіла наслідком дії сили прецесії Fp, так як остання є 1 навколо осі примусової прецесії 4. причиною прецесійного руху робочого тіла 1 по Конструкція робочого тіла 1, що реалізує зазамкнутій траєкторії 3, в результаті чого сила припропонований спосіб розподілу сил Коріолісових, мусової прецесії Fp трансформується в тягове зупредставлена на Фіг.2. силля Коріоліса FS з відповідною ефективністю Робоче тіло 1 розташоване на валу 9 та скла(ККД). дається з окремих частин 5i, які виконані в формі Складний рух частини 5i робочого тіла 1 харадисків відповідного діаметра Di. Число N окремих ктеризується запасом обертової енергії Eі½½(w), що частин 5i може бути яким завгодно, але не менобумовлюється його обертанням навколо локальшим двох. В наведеному прикладі на Фіг.2 число N ної осі 2, та визначається як вибрано парним, та дорівнює восьми в даному Еі½½(w) =0.5І і½½ w2, (3) прикладі виконання (N=8). Маса величиною mi де Iі½½ - момент інерції частини 5і робочого тіла окремої частини 5i робочого тіла 1 локалізована в 1 відносно локальної осі 2; w - кутова швидкість області 10 ободу навколо конусної поверхні 11, кут обертання робочого тіла 1. нахилу a якої визначається із відношення a В свою чергу, момент інерції Iі½½ визначається =arctan(W/w). масою m i та геометричними параметрами відповіДля прикладу значення k = w/W вибрано цілим, дної частини 5i робочого тіла 1. 2 причому таким чином, що k = 4. Кожен внутрішній Iі½½=k*m i*Ri (4) де безрозмірний коефіцієнт k, який відображає диск 5i; i = 2,N - 1 може бути з'єднаний між собою геометричну форму тіла 5i, що обертається. шти фтами 12, а між окремими частинами 5i робочого тіла 1 може бути проміжок величиною S. Вну ( ) ( ) ( ) 7 84200 8 трішнiй діаметр di відповідної частини 5i робочого цього правила вектор швидкості переміщення Vi тіла визначається таким чином, що маса ободу 10 повертають на 90° в напрямку С обертання відподиска 5i над конусною поверхнею 11 дорівнює масі відного робочого тіла 1, в результаті чого визнаободу диска 5i всередині конусної поверхні 11. чають напрямок дії прискорення Коріоліса, що поКрайні диски 5і та 5N на Фіг.2 нерухомо прикріроджує відповідну силу Коріоліса Fk яка діє на плені до валу 9, а в одному із дисків (5N) виконані відповідну частину 5; робочого тіла 1. Згідно праотвори 13 для локалізації маси диска в області вила Жуковського сила Коріоліса Fki співпадає з його ободу. Вид В крайнього диска 5N приведений напрямком повернутого таким чином вектора на Фіг.3. швидкості Vi. Мінімальна кількість окремих частин 5i робочоПримусова прецесія робочого тіла 1 навколо го тіла 1, що реалізують запропонований спосіб, вертикальної осі 4 призводить також до появи відможе бути зменшена до двох (див. Фіг.4). При центрової сили Fb, що може бути причиною періцьому проміжок S між частинами збільшується до одичного відхилення валa 17 в горизонтальній максимального, а форма робочого тіла при цьому площині 7 та до значних вібрацій під час роботи відповідає формі гантелі. При цьому максимальгіродинамічної системи на Фіг.1. Тому р ушій 16 ний діаметр D 14 робочого тіла 1 на Фіг.4 вибирарозташовують напроти робочого тіла 1 відносно ють меншим від розміру L 15 робочого тіла 1 вертикального валa 17. Рушій 16 виконує при цьовздовж локальної осі 2. Вид В на Фіг.4 має такий му функцію балансира для компенсації відцентроже вигляд як і на Фіг.3. вої сили Fb . Запропонований спосіб на Фіг.1 застосовують Для плоско-паралельного переміщення в пронаступним чином. сторі гіродинамічної системи на Фіг.1 необхідно, Робоче тіло 1 на Фіг.1, що характеризується щоб сума усі х силових моментів в вертикальному масою М, обертають за допомогою рушія 16 з кунапрямку (в тому числі і гіродинамічних моментів Mi кожної частини робочого тіла), що виникають товою швидкістю w навколо локальної осі 2 з одпід час роботи гіродинамічної системи, зводилася ночасною примусовою прецесією за допомогою до нуля вздовж локальної осі 2 відносно довільної обертання вертикального валу 17 від другого руточки Q на осі 2. шія 18 по колу 3 навколо осі 4 з кутовою швидкістю Таким чином, запропоноване технічне рішення примусової прецесії W. Примусову прецесію рободозволяє переміщати транспортні засоби в просчого тіла 1 виконують в розрідженому газовому торі без застосування реактивної тяги за рахунок середовищі або в вакуумі для зменшення втрат, розкручування одного робочого тіла 1 (маховика) з що зв'язані з опором повітря, чи іншого газового відповідним розподілом сил Коріолісових вздовж середовища під час руху робочого тіла 1 й по тралокальної осі 2. єкторії 3 примусової прецесії. При цьому на робоВ якості робочого тіла 1 може бути використаче тіло 1 діють сили Коріоліса Fki, що направлені ний також суцільний конусний маховик, окремі дівздовж осі прецесії 4. Напрямок дії сил Коріолісолянки якого мають відповідний діаметр Di. вих визначається відомим правилом М.Є. ЖуковЗапропонований спосіб знайшов застосування ського [Н.Е. Жуковский "Кинематика, Статика, Див експериментальній гіродинамічнiй системі і поканамика точки" Москва, ОборонГиз, 1939р. - с.67, зав на практиці свою ефективність. 68] для довільної частини 5i робочого тіла 1. Згідно 9 Комп’ютерна в ерстка В. Клюкін 84200 Підписне 10 Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for distribution of coriolis forces
Автори англійськоюLykhovyd Yurii Makarovych
Назва патенту російськоюСпособ распределения кориолисовых сил
Автори російськоюЛиховид Юрий Макарович
МПК / Мітки
МПК: B64G 1/28, G01C 19/00
Мітки: сіль, коріолісових, розподілу, спосіб
Код посилання
<a href="https://ua.patents.su/5-84200-sposib-rozpodilu-sil-koriolisovikh.html" target="_blank" rel="follow" title="База патентів України">Спосіб розподілу сил коріолісових</a>
Спосіб компенсації сил гіроскопічного моменту
Номер патенту: 24572
Опубліковано: 10.07.2007
Автор: Лиховид Юрій Макарович
МПК: B64G 1/28, G01C 19/00
Мітки: спосіб, моменту, компенсації, сіль, гіроскопічного
Формула / Реферат:
1. Спосіб компенсації сил гіроскопічного моменту з обертанням робочого тіла (1) навколо локальної осі (5), з одночасним переміщенням робочого тіла (1) по замкнутій траєкторії (6) навколо осі примусової прецесії (4) та з узгодженням кутової швидкості Ω прецесії робочого тіла (1) з кутовою швидкістю ω обертання робочого тіла (1) навколо локальної осі (5), який відрізняється тим, що локальну вісь (5) обертання робочого тіла (1)...
Спосіб узгодження сил коріоліса
Номер патенту: 19713
Опубліковано: 15.12.2006
Автор: Лиховид Юрій Макарович
МПК: G01C 19/00, B64G 1/28
Мітки: сіль, коріоліса, спосіб, узгодження
Формула / Реферат:
1. Спосіб узгодження сил Коріоліса, що включає обертання робочих тіл (1а, 16), розподілених навколо відповідних локальних осей (2а, 2б), переміщення усіх робочих тіл по замкнутій траєкторії (5, 7) навколо спільної осі (3) та узгодження швидкості V переміщення кожного робочого тіла (1а, 16) навколо спільної осі (3) зі швидкістю ω обертання кожного робочого тіла (1а, 16) навколо відповідної локальної осі (2а, 2б), який відрізняється тим,...
Система для рівномірного розподілу електричного навантаження в трифазовій або щонайменше однофазовій мережі розподілу енергії (варіанти)
Номер патенту: 66777
Опубліковано: 15.06.2004
Автори: Дейвід Йер, Уіттнер Льюпу
МПК: H02J 1/10
Мітки: електричного, розподілу, однофазовій, щонайменше, мережі, варіанти, система, рівномірного, трифазовій, енергії, навантаження
Формула / Реферат:
1. Трифазова система розподілу навантаження для рівномірного розподілу електричного навантаження, що знаходиться в множині паралельних ланцюгів, у трифазовій мережі розподілу енергії, яка відрізняється тим, що містить:- перший, другий і третій датчики струму, підключені до відповідної першої, другої і третьої фази трифазової мережі розподілу електроенергії і призначені для виміру електричних струмів, що протікають у ланцюзі першої,...
Спосіб компенсації гіромоменту
Номер патенту: 15765
Опубліковано: 17.07.2006
Автор: Лиховид Юрій Макарович
МПК: B64G 1/28, G01C 19/00
Мітки: спосіб, компенсації, гіромоменту
Формула / Реферат:
1. Спосіб компенсації гіромоменту з обертанням робочого тіла навколо локальної осі з одночасним його переміщенням, який відрізняється тим, що обертають декілька додаткових робочих тіл, розподілених навколо відповідних локальних осей і переміщують усі робочі тіла по замкнутій траєкторії навколо спільної осі, яка розташована поза центрами мас робочих тіл.2. Спосіб за п. 1, який відрізняється тим, що робочі тіла примусово...
Спосіб обліку розподілу кліщів у кроні плодового дерева
Номер патенту: 69545
Опубліковано: 15.09.2004
Автори: Манько Олександр Володимирович, Власова Ольга Григорівна
МПК: A01G 13/00
Мітки: обліку, крони, кліщів, дерева, розподілу, спосіб, плодового
Формула / Реферат:
Спосіб обліку розподілу кліщів у кроні плодового дерева, що включає підбір модельних облікових дерев, на листі яких мешкають кліщі, відбір для обліку зразків листя з периферії та середини крони, який відрізняється тим, що обліком охоплюють крону за висотою й за глибиною шляхом умовного поділення її на яруси за висотою та глибину за відстанню від штамба дерева до периферії крони, для чого у І-у ярусі з 3-х проб по глибині відбирають 30...
Попередній патент: Пристрій оцінки ефективності інгібіторів солевідкладання
Наступний патент: Комбінація гербіцид-сафенер
Випадковий патент: Двигун внутрішнього згоряння